- БТС-Биоуправляемые протезы

Содержание
- 2. Биоуправляемые активные протезы ─ это протезы, в которых для управления используется информация, полученная от организма человека
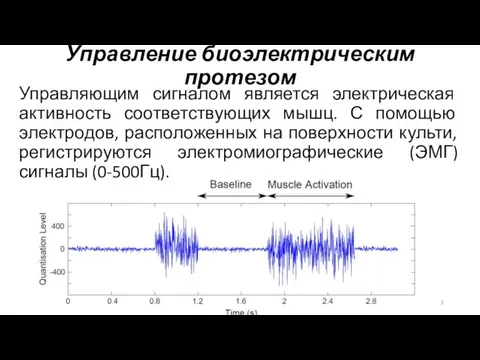
- 3. Управление биоэлектрическим протезом Управляющим сигналом является электрическая активность соответствующих мышц. С помощью электродов, расположенных на поверхности
- 4. Основные проблемы, возникающие при регистрации ЭМГ-сигнала Низкая амплитуда сигнала от 20 мкВ до 2 мВ при
- 5. Особенности конструкций электродов для снятия ЭМГ-сигнала При правильном позиционировании электродов увеличивается амплитуда полезного сигнала, увеличивается соотношение
- 6. Материалы, из которых могут быть изготовлены электроды: серебро, хлорсеребряные электроды, либо из золота или платины; На
- 7. Блок-схема управления протезом со встроенной системой биоэлектрического управления 1-пара электродов токоотводящего устройства 2-усилитель напряжения 3-активный детектор
- 8. Протез предплечья с системой обратной связи 1-блок питания 2- косметическая оболочка 3-усилители напряжения с токосъемным устройством
- 9. Блок-схема управления протезом с устройством обратной связи.
- 10. Особенности современных бионических протезов Широкий набор вариантов сжатия; Управление режимами работы может осуществляться как за счет
- 11. Основные преимущества перспективных современных бионических протезов Способность надежно захватывать предметы разных форм; Аккуратный автоматический захват хрупких
- 12. Kleiber Solo(«Клайбер Бионикс≫,Россия) Kleiber Solo – протез кисти с предплечьем (6 степеней свободы кисти, дополнительная опция
- 13. Точный захват хрупких и легко деформируемых предметов обеспечивается с помощью системы чувствительных тактильных датчиков; Если необходимо
- 14. Kleiber Duo – Solo + подвижный локтевой сустав (дополнительная степень свободы); Kleiber Trio – Duo +подвижный
- 16. Скачать презентацию
Биоуправляемые активные протезы ─ это протезы, в которых для управления используется
Биоуправляемые активные протезы ─ это протезы, в которых для управления используется
Управление биоэлектрическим протезом
Управляющим сигналом является электрическая активность соответствующих мышц. С помощью
Управление биоэлектрическим протезом
Управляющим сигналом является электрическая активность соответствующих мышц. С помощью
Основные проблемы, возникающие при регистрации ЭМГ-сигнала
Низкая амплитуда сигнала от 20 мкВ
Основные проблемы, возникающие при регистрации ЭМГ-сигнала
Низкая амплитуда сигнала от 20 мкВ

Особенности конструкций электродов для снятия ЭМГ-сигнала
При правильном позиционировании электродов увеличивается
Особенности конструкций электродов для снятия ЭМГ-сигнала
При правильном позиционировании электродов увеличивается
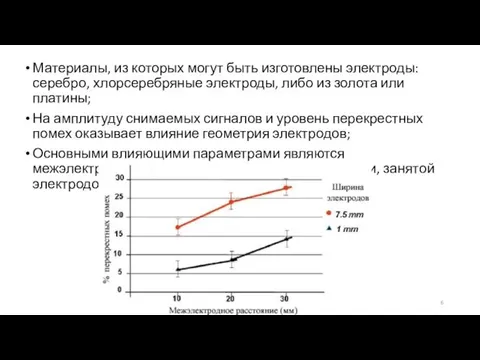
Материалы, из которых могут быть изготовлены электроды: серебро, хлорсеребряные электроды, либо
Материалы, из которых могут быть изготовлены электроды: серебро, хлорсеребряные электроды, либо
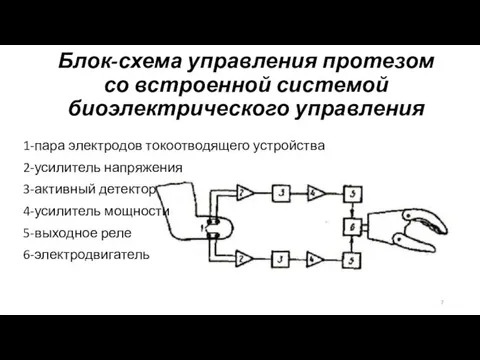
Блок-схема управления протезом со встроенной системой биоэлектрического управления
1-пара электродов токоотводящего устройства
2-усилитель
Блок-схема управления протезом со встроенной системой биоэлектрического управления
1-пара электродов токоотводящего устройства
2-усилитель
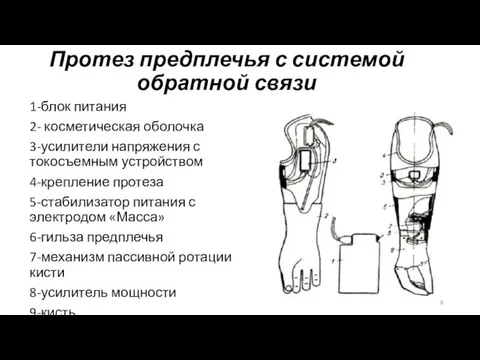
Протез предплечья с системой обратной связи
1-блок питания
2- косметическая оболочка
3-усилители напряжения с
Протез предплечья с системой обратной связи
1-блок питания
2- косметическая оболочка
3-усилители напряжения с

Блок-схема управления протезом с устройством обратной связи.
Блок-схема управления протезом с устройством обратной связи.
Особенности современных бионических протезов
Широкий набор вариантов сжатия;
Управление режимами работы может осуществляться
Особенности современных бионических протезов
Широкий набор вариантов сжатия;
Управление режимами работы может осуществляться
Основные преимущества перспективных современных бионических протезов
Способность надежно захватывать предметы разных форм;
Аккуратный
Основные преимущества перспективных современных бионических протезов
Способность надежно захватывать предметы разных форм;
Аккуратный
Kleiber Solo(«Клайбер Бионикс≫,Россия)
Kleiber Solo – протез кисти с предплечьем (6 степеней
Kleiber Solo(«Клайбер Бионикс≫,Россия)
Kleiber Solo – протез кисти с предплечьем (6 степеней

Точный захват хрупких и легко деформируемых предметов обеспечивается с помощью системы
Точный захват хрупких и легко деформируемых предметов обеспечивается с помощью системы

Kleiber Duo – Solo + подвижный локтевой сустав (дополнительная степень свободы);
Kleiber
Kleiber Duo – Solo + подвижный локтевой сустав (дополнительная степень свободы);
Kleiber
 Минем уңышлырым
Минем уңышлырым Пневмония. Атипичные пневмонии
Пневмония. Атипичные пневмонии Презентация к вводному занятию Волшебная страна бисера.
Презентация к вводному занятию Волшебная страна бисера. АКТ мен тұрақты дамудың мыңжылдық. Декларациясындағы мақсаттарға жету арасындағы байланыс
АКТ мен тұрақты дамудың мыңжылдық. Декларациясындағы мақсаттарға жету арасындағы байланыс Вентиляция. Организация воздухообмена в зданиях
Вентиляция. Организация воздухообмена в зданиях Марина Ивановна Цветаева 1892-1941
Марина Ивановна Цветаева 1892-1941 Зимние забавы на прогулке
Зимние забавы на прогулке Ауыз қуысының анатомиясы және физиологиясы. Ауыз қуысының кілегейлі қабығының құрамы және қызметтері. Сілікей
Ауыз қуысының анатомиясы және физиологиясы. Ауыз қуысының кілегейлі қабығының құрамы және қызметтері. Сілікей Основные определения, топологические параметры и методы расчета электрических цепей
Основные определения, топологические параметры и методы расчета электрических цепей ООО Городецкий судоремонтный завод
ООО Городецкий судоремонтный завод Правописание приставок ПРЕ- и ПРИ-
Правописание приставок ПРЕ- и ПРИ- Иван-дурак в волшебных сказках
Иван-дурак в волшебных сказках Экономические ресурсы и международное разделения труда
Экономические ресурсы и международное разделения труда Наречие как часть речи. Правописание наречий
Наречие как часть речи. Правописание наречий Онтогенез общения от 0 до 7 лет
Онтогенез общения от 0 до 7 лет The Presentation of Jesus Christ in the Temple
The Presentation of Jesus Christ in the Temple Психічний розвиток дитини від народження до вступу у школу
Психічний розвиток дитини від народження до вступу у школу Расчет суточной нормы кормления и обоснование цены
Расчет суточной нормы кормления и обоснование цены Функциональная организация фон-неймановской ВМ
Функциональная организация фон-неймановской ВМ Сүзгілер
Сүзгілер ПДД Причины несчастных случае на дорогах
ПДД Причины несчастных случае на дорогах Человек в системе экономических отношений
Человек в системе экономических отношений Как люди считали в старину и как писали цифры
Как люди считали в старину и как писали цифры Superheroes. Comparisons
Superheroes. Comparisons Общественный сектор современной России, масштабы и возможности
Общественный сектор современной России, масштабы и возможности презентация Наркотики-дорога в никуда
презентация Наркотики-дорога в никуда Сопротивление в цепи переменного тока
Сопротивление в цепи переменного тока В мире живой природы
В мире живой природы