- Cтруктура автоматизированных электроприводов (АЭП). Способы пуска и торможения

Содержание
- 2. Классификация электроприводов Структура автоматизированного электропривода (АЭП) Коэффициент полезного действия и основные достоинства АЭП Регулирование момента, тока,
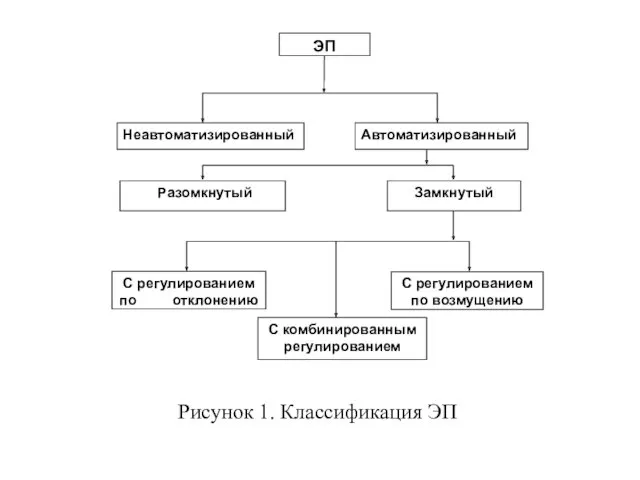
- 3. Классификация электроприводов В зависимости от выполняемых функций, вида и числа регулируемых координат, степени автоматизации технологических процессов
- 5. Неавтоматизированный ЭП - управление с помощью оператора, который осуществляет пуск, остановку, изменение скорости, реверсирование ЭП в
- 6. Разомкнутый ЭП - характеризуется тем, что все внешние воздействия (например, момент инерции) влияют на его выходную
- 7. Регулирование по возмущению - дополнительный сигнал, пропорциональный возмущению подаётся на вход ЭП вместе с сигналом задания,
- 8. Регулирование по отклонению - характеризуется наличием цепей обратной связи. Информация о регулируемой координате подаётся на вход
- 9. Связь выхода звена САУ с его входом называется простой обратной связью (ОС), связь выхода САУ с
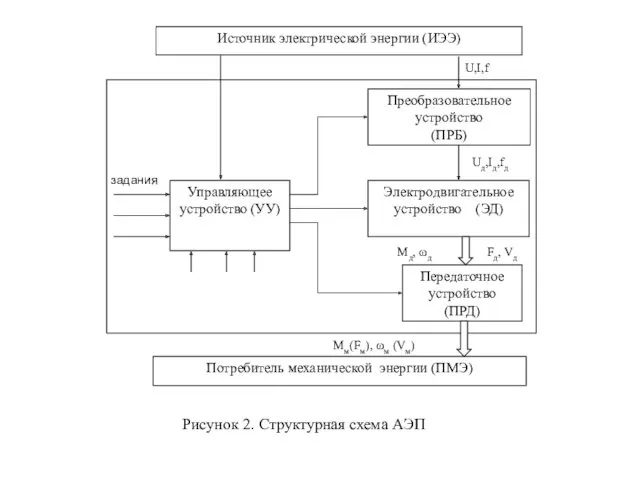
- 10. 2. Структура автоматизированного электропривода (АЭП) Автоматизированным электроприводом называют электромеханическую систему, состоящую в общем виде из электродвигательного,
- 12. Основное назначения АЭП - преобразование электроэнергии в механическую энергию исполнительных органов машин и механизмов. В отдельных
- 13. 3. Коэффициент полезного действия и основные достоинства АЭП Как и для всякого электромеханического устройства, важным показателем
- 14. Основные достоинства АЭП 1) низкий уровень шума при работе; 2) широкий диапазон мощностей и угловых скоростей
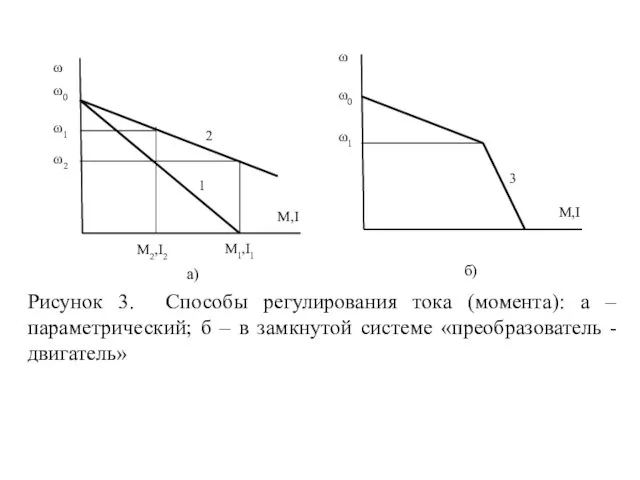
- 15. 4. Регулирование момента, тока, положения ЭП При формировании заданного графика движения исполнительных органов часто бывает необходимо
- 16. Момент ДПТ пропорционален произведению магнитного потока и тока якоря, т. е. М = kФI, где k
- 17. Для анализа возможности регулирования тока используется электромеханическая характеристика двигателя (иногда называемая скоростной), которая представляет собой зависимость
- 20. Скачать презентацию
Классификация электроприводов
Структура автоматизированного электропривода (АЭП)
Коэффициент полезного действия и
Классификация электроприводов
Структура автоматизированного электропривода (АЭП)
Коэффициент полезного действия и
Классификация электроприводов
В зависимости от выполняемых функций, вида и числа
Классификация электроприводов
В зависимости от выполняемых функций, вида и числа
Неавтоматизированный ЭП - управление с помощью оператора, который осуществляет пуск,
Неавтоматизированный ЭП - управление с помощью оператора, который осуществляет пуск,
Разомкнутый ЭП - характеризуется тем, что все внешние воздействия (например,
Разомкнутый ЭП - характеризуется тем, что все внешние воздействия (например,
Регулирование по возмущению - дополнительный сигнал, пропорциональный возмущению подаётся на
Регулирование по возмущению - дополнительный сигнал, пропорциональный возмущению подаётся на
Регулирование по отклонению - характеризуется наличием цепей обратной связи.
Регулирование по отклонению - характеризуется наличием цепей обратной связи.
Связь выхода звена САУ с его входом называется простой обратной
Связь выхода звена САУ с его входом называется простой обратной
2. Структура автоматизированного электропривода (АЭП)
Автоматизированным электроприводом называют электромеханическую
2. Структура автоматизированного электропривода (АЭП)
Автоматизированным электроприводом называют электромеханическую
Основное назначения АЭП - преобразование электроэнергии в механическую энергию исполнительных
Основное назначения АЭП - преобразование электроэнергии в механическую энергию исполнительных
3. Коэффициент полезного действия и основные достоинства АЭП
Как
3. Коэффициент полезного действия и основные достоинства АЭП
Как
Основные достоинства АЭП
1) низкий уровень шума при работе;
2) широкий диапазон мощностей
Основные достоинства АЭП
1) низкий уровень шума при работе;
2) широкий диапазон мощностей
4. Регулирование момента, тока, положения ЭП
При формировании заданного графика движения
4. Регулирование момента, тока, положения ЭП
При формировании заданного графика движения
Момент ДПТ пропорционален произведению магнитного потока и тока якоря, т.
Момент ДПТ пропорционален произведению магнитного потока и тока якоря, т.
Для анализа возможности регулирования тока используется электромеханическая характеристика двигателя (иногда
Для анализа возможности регулирования тока используется электромеханическая характеристика двигателя (иногда
 Рассеянный склероз
Рассеянный склероз Метод щелевой разгрузки пласта в призабойной зоне скважин
Метод щелевой разгрузки пласта в призабойной зоне скважин Литературные места России. Веркола - родина Ф.А. Абрамова
Литературные места России. Веркола - родина Ф.А. Абрамова Проблемы энерго- и ресурсосбережния в кожевенном производстве
Проблемы энерго- и ресурсосбережния в кожевенном производстве Задачи по теории вероятностей
Задачи по теории вероятностей Социальная информатика
Социальная информатика Шаблон курсовой работы
Шаблон курсовой работы Как создавать правильные презентации
Как создавать правильные презентации Конкурс чтецов, посвященный Дню Победы
Конкурс чтецов, посвященный Дню Победы Правила компьютерного набора текста
Правила компьютерного набора текста Новый Год шагает по планете. Викторина
Новый Год шагает по планете. Викторина British vs. American English
British vs. American English Театрализованные игры, драматизации
Театрализованные игры, драматизации Пропедевтика. Функциональные методы исследования и диагностики при заболеваниях сердечно-сосудистой системы
Пропедевтика. Функциональные методы исследования и диагностики при заболеваниях сердечно-сосудистой системы РРЯ 10.02
РРЯ 10.02 Культура и духовная жизнь общества
Культура и духовная жизнь общества День именинника. Поздравления в стихах
День именинника. Поздравления в стихах Произведения В. Берестов В магазине игрушек и Р. Сеф Совет
Произведения В. Берестов В магазине игрушек и Р. Сеф Совет CLT Технология - деревянное домостроение
CLT Технология - деревянное домостроение Проект Белый Голубь
Проект Белый Голубь Логопедический кабинет
Логопедический кабинет Великая Отечественная война
Великая Отечественная война Несимметричные КЗ. Нулевая последовательность
Несимметричные КЗ. Нулевая последовательность Презентация Пасху радостно встречаем!
Презентация Пасху радостно встречаем! Описание пространственного положения элементарной ячейки: ориентационные соотношения
Описание пространственного положения элементарной ячейки: ориентационные соотношения презентация классного часа День республики Башкортостан
презентация классного часа День республики Башкортостан Аномальді бүйректің гистоморфологиялық сипаттамасы
Аномальді бүйректің гистоморфологиялық сипаттамасы Follow Me
Follow Me