- Элементарные действия мобильного робота

Содержание
- 2. Цели урока Научиться реализовывать алгоритмы для элементарных действий мобильного робота
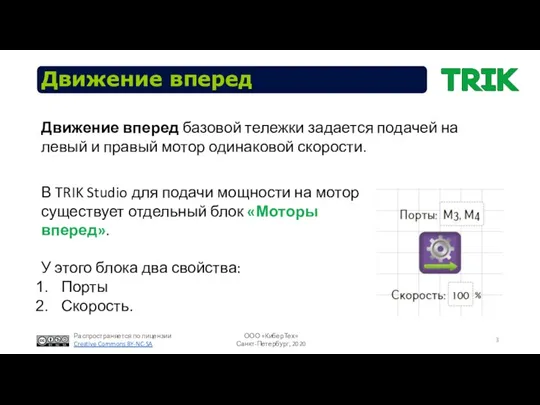
- 3. Движение вперед Движение вперед базовой тележки задается подачей на левый и правый мотор одинаковой скорости. В
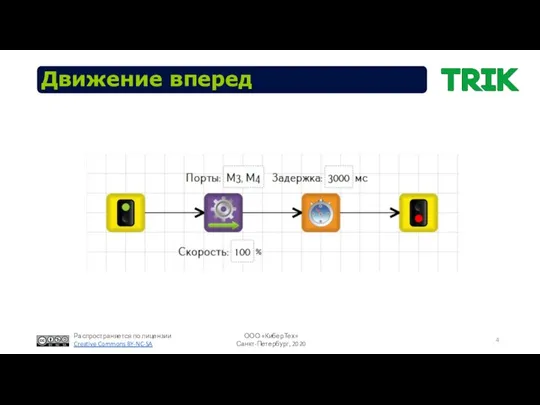
- 4. Движение вперед
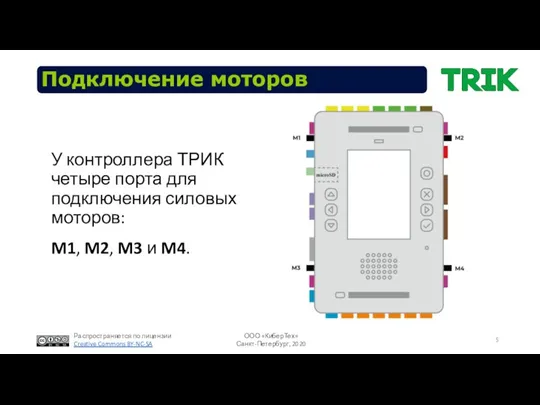
- 5. Подключение моторов У контроллера ТРИК четыре порта для подключения силовых моторов: M1, M2, M3 и M4.
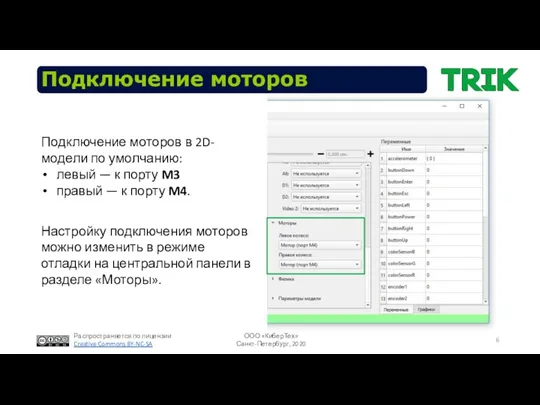
- 6. Подключение моторов Подключение моторов в 2D-модели по умолчанию: левый — к порту M3 правый — к
- 7. Подключение моторов
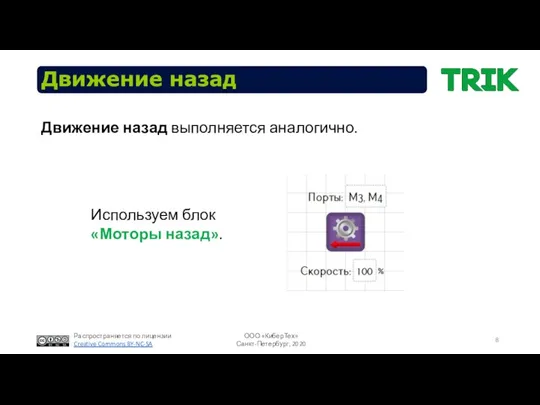
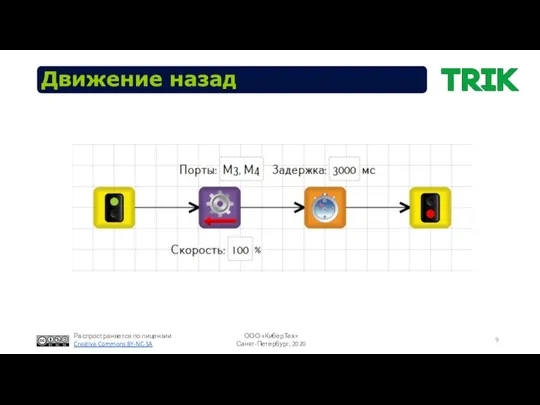
- 8. Движение назад Движение назад выполняется аналогично. Используем блок «Моторы назад».
- 9. Движение назад
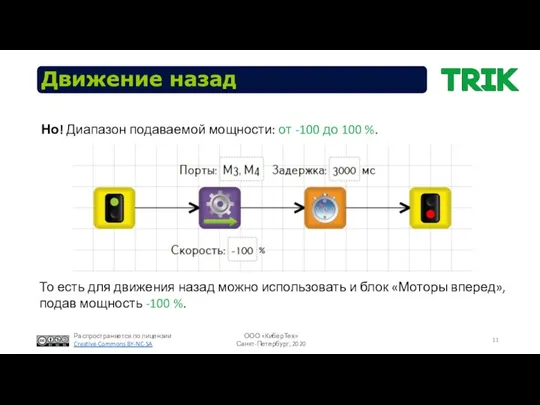
- 10. Движение назад Но! Диапазон подаваемой мощности: от -100 до 100 %. То есть для движения назад
- 11. Движение назад Но! Диапазон подаваемой мощности: от -100 до 100 %. То есть для движения назад
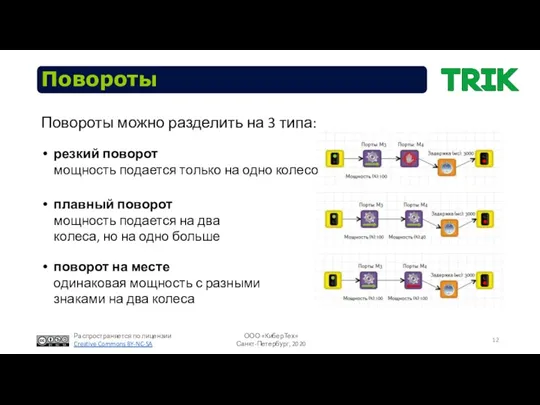
- 12. Повороты Повороты можно разделить на 3 типа: резкий поворот мощность подается только на одно колесо плавный
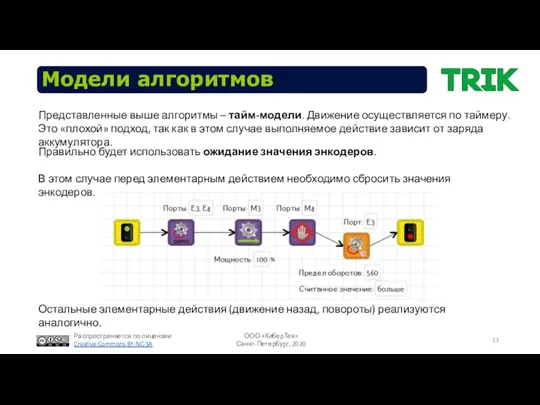
- 13. Модели алгоритмов Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это «плохой» подход, так как
- 15. Скачать презентацию
Цели урока
Научиться реализовывать алгоритмы для элементарных действий мобильного робота
Цели урока
Научиться реализовывать алгоритмы для элементарных действий мобильного робота
Движение вперед
Движение вперед базовой тележки задается подачей на левый и правый
Движение вперед
Движение вперед базовой тележки задается подачей на левый и правый
Движение вперед
Движение вперед
Подключение моторов
У контроллера ТРИК четыре порта для подключения силовых моторов:
M1, M2,
Подключение моторов
У контроллера ТРИК четыре порта для подключения силовых моторов: M1, M2,
Подключение моторов
Подключение моторов в 2D-модели по умолчанию:
левый — к порту M3
правый
Подключение моторов
Подключение моторов в 2D-модели по умолчанию:
левый — к порту M3
правый
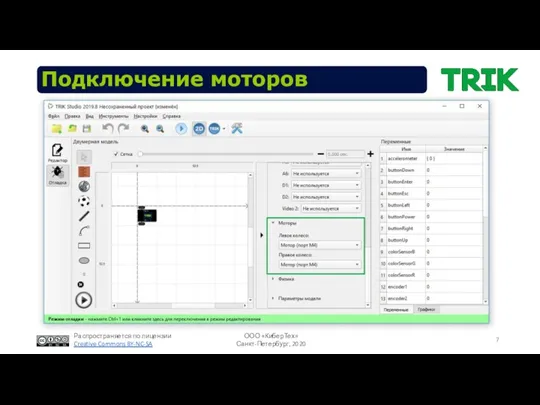
Подключение моторов
Подключение моторов
Движение назад
Движение назад выполняется аналогично.
Используем блок «Моторы назад».
Движение назад
Движение назад выполняется аналогично.
Используем блок «Моторы назад».
Движение назад
Движение назад

Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
Повороты
Повороты можно разделить на 3 типа:
резкий поворот
мощность подается только на
Повороты
Повороты можно разделить на 3 типа:
резкий поворот мощность подается только на
Модели алгоритмов
Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это
Модели алгоритмов
Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это
 Операции на оверлоках
Операции на оверлоках Арифметикалық амалдар 6-сынып
Арифметикалық амалдар 6-сынып ВКР: Разработка системы на основе микроконтроллеров
ВКР: Разработка системы на основе микроконтроллеров Стартовая диагностика первоклассников
Стартовая диагностика первоклассников Методы добычи нефти и газа. Способы эксплуатации скважин
Методы добычи нефти и газа. Способы эксплуатации скважин Учет нематериальных активов
Учет нематериальных активов Видеоурок по теме Сфера и шар. 11 класс
Видеоурок по теме Сфера и шар. 11 класс Энциклопедия интерфейсов разъёмов
Энциклопедия интерфейсов разъёмов Mikołaj Święty
Mikołaj Święty Цифрофой дневник. Проект Жилой дом
Цифрофой дневник. Проект Жилой дом Benjamin Franklin. Honesty is the best policy''
Benjamin Franklin. Honesty is the best policy'' крестьянские хоромы
крестьянские хоромы Термодинамические и газодинамические основы теории турбомашин
Термодинамические и газодинамические основы теории турбомашин Формирование открытого слога у неговорящих детей, подготовка к обучению грамоте и обучение чтению открытых слогов детей дошкольного возраста. Раздел 1.
Формирование открытого слога у неговорящих детей, подготовка к обучению грамоте и обучение чтению открытых слогов детей дошкольного возраста. Раздел 1. Сущность и функции денег. Структура денежной массы
Сущность и функции денег. Структура денежной массы Алгебра высказываний. Решение логических задач
Алгебра высказываний. Решение логических задач Сountable nouns
Сountable nouns Ударные и безударные слоги
Ударные и безударные слоги Автомобиль будущего - каким он будет? Технологии будущего. Летающие автомобили
Автомобиль будущего - каким он будет? Технологии будущего. Летающие автомобили 8lOoskJ7hO6ervjXFRI9bOVoEXJskZO1KIoaeqce
8lOoskJ7hO6ervjXFRI9bOVoEXJskZO1KIoaeqce Музей Казачьего быта глазами нового поколения
Музей Казачьего быта глазами нового поколения Викторина по основам православной культуры. Подвиг новомучеников и исповедников Церкви Русской
Викторина по основам православной культуры. Подвиг новомучеников и исповедников Церкви Русской Час занимательной математики. 5 класс
Час занимательной математики. 5 класс Психология как профессия
Психология как профессия 8 марта
8 марта Китайская компания Anhui Greenland Biotech Co. Ltd. Производитель средств ухода за протезами и брекетами мирового класса
Китайская компания Anhui Greenland Biotech Co. Ltd. Производитель средств ухода за протезами и брекетами мирового класса Мультимедийная презентация Автобус Диск
Мультимедийная презентация Автобус Диск Скарлатина
Скарлатина