- футбол роботов

Содержание
- 2. План занятия Датчики Hitechnic Компас. Движение по азимуту Теннис роботов IRSeeker. Поиск мяча Совмещение двух датчиков
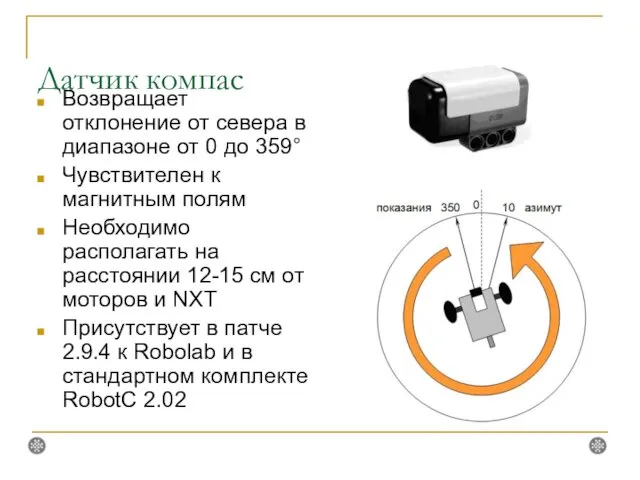
- 3. Датчик компас Возвращает отклонение от севера в диапазоне от 0 до 359° Чувствителен к магнитным полям
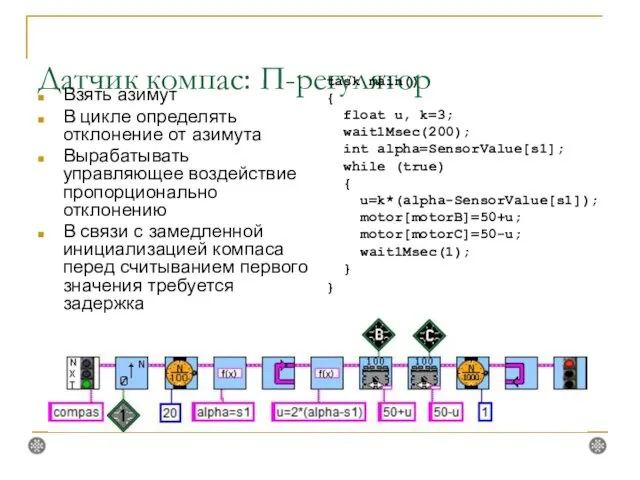
- 4. Датчик компас: П-регулятор Взять азимут В цикле определять отклонение от азимута Вырабатывать управляющее воздействие пропорционально отклонению
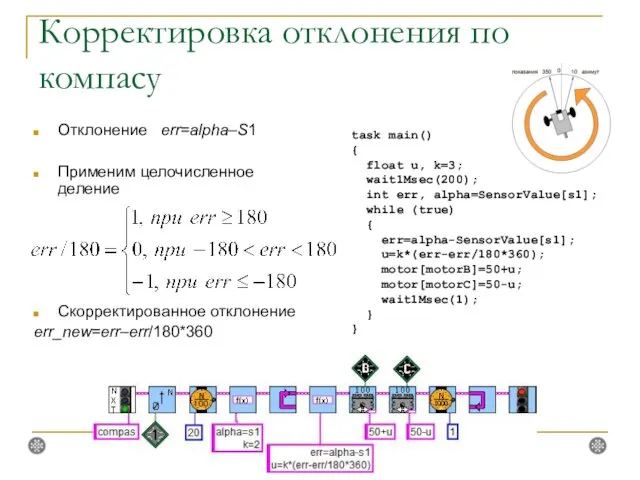
- 5. Корректировка отклонения по компасу Отклонение err=alpha–S1 Применим целочисленное деление Скорректированное отклонение err_new=err–err/180*360 task main() { float
- 6. Параллельное управление азимутом Азимут становится глобальной переменной Из параллельной задачи производится изменение азимута Целочисленным делением производится
- 7. Теннис роботов На соревнованиях «Теннис роботов» робот может двигаться зигзагом Задача: выталкивать мячи на сторону противника
- 8. Инфракрасный мяч и IRSeeker Инфракрасный мяч имеет 20 излучателей, постоянный и импульсный режимы, работает от 4
- 9. Программирование IRSeeker Центральный сектор датчика имеет номер 5 – это уставка Коэффициент (10) большой из-за малых
- 10. Совмещение компаса и ИК-поисковика Для контроля наличия мяча используется интенсивность излучения на встроенном датчике №3. Необходимо
- 11. Совмещение компаса и IR-Seeker Переинициализация происходит слишком медленно, ветвление получает неверные значения Использовать предопределенные переменные dir
- 12. Robocup GEN II Football Состязания Всемирной олимпиады роботов Робот должен помещаться в цилиндр диаметром и высотой
- 13. Состояния – различные участки поля 3 4 2 6 5 7 1
- 14. Условные обозначения state – номер состояния (соответствует номеру вызываемой подпрограммы) state0 – предыдущее состояние color –
- 15. Основной алгоритм Начальные значения Калибровка яркости цветов Определение подпрограмм обработки состояний Цикл переходов состояний (вызовы подпрограмм
- 16. Начальные значения переменных Номера цветов Номера состояний Между собой нет соответствия Нумерованные контейнеры с1-с5 хранят реальные
- 17. Параллельная задача по определению цвета
- 18. Переходы состояний Номер подпрограммы соответствует номеру состояния В каждой подпрограмме состояние может измениться В бесконечном цикле
- 19. Калибровка яркости цветов Высокая точность – чтение в Raw-формате «Перевернутый» диапазон значений Raw: вычитание из 1023
- 20. Определение цвета в RAW-формате После калибровки освещенности следует проверить работу подзадачи определения текущего цвета поля
- 21. Калибровка + вывод на экран При калибровке каждого цвета происходит ожидание нажатия кнопки 3 (оранжевой) –
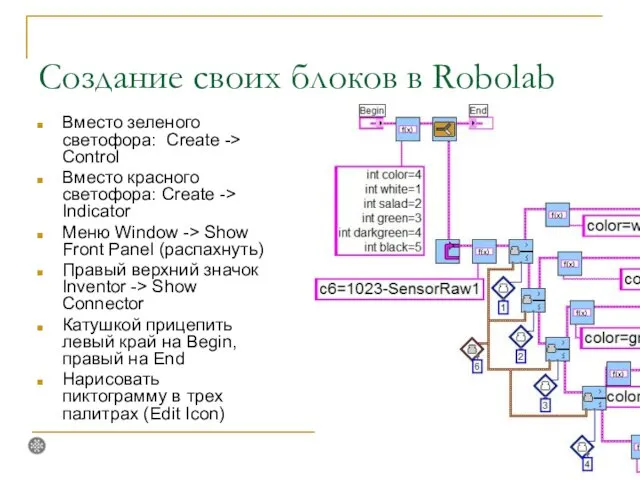
- 22. Создание своих блоков в Robolab Вместо зеленого светофора: Create -> Control Вместо красного светофора: Create ->
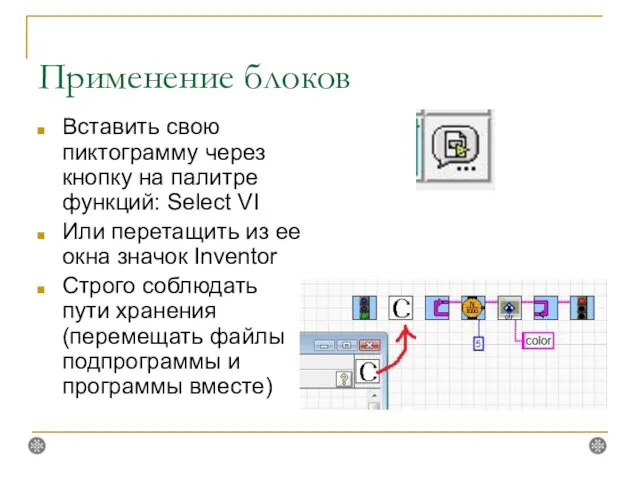
- 23. Применение блоков Вставить свою пиктограмму через кнопку на палитре функций: Select VI Или перетащить из ее
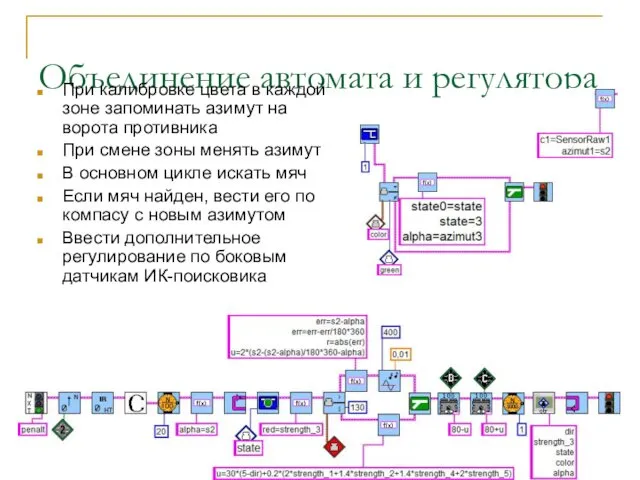
- 24. Объединение автомата и регулятора При калибровке цвета в каждой зоне запоминать азимут на ворота противника При
- 26. Скачать презентацию
План занятия
Датчики Hitechnic
Компас. Движение по азимуту
Теннис роботов
IRSeeker. Поиск мяча
Совмещение двух
План занятия
Датчики Hitechnic
Компас. Движение по азимуту
Теннис роботов
IRSeeker. Поиск мяча
Совмещение двух
Датчик компас
Возвращает отклонение от севера в диапазоне от 0 до 359°
Чувствителен
Датчик компас
Возвращает отклонение от севера в диапазоне от 0 до 359°
Чувствителен
Датчик компас: П-регулятор
Взять азимут
В цикле определять отклонение от азимута
Вырабатывать управляющее воздействие
Датчик компас: П-регулятор
Взять азимут
В цикле определять отклонение от азимута
Вырабатывать управляющее воздействие
Корректировка отклонения по компасу
Отклонение err=alpha–S1
Применим целочисленное деление
Скорректированное отклонение
err_new=err–err/180*360
task main()
{
float u,
Корректировка отклонения по компасу
Отклонение err=alpha–S1
Применим целочисленное деление
Скорректированное отклонение
err_new=err–err/180*360
task main()
{
float u,
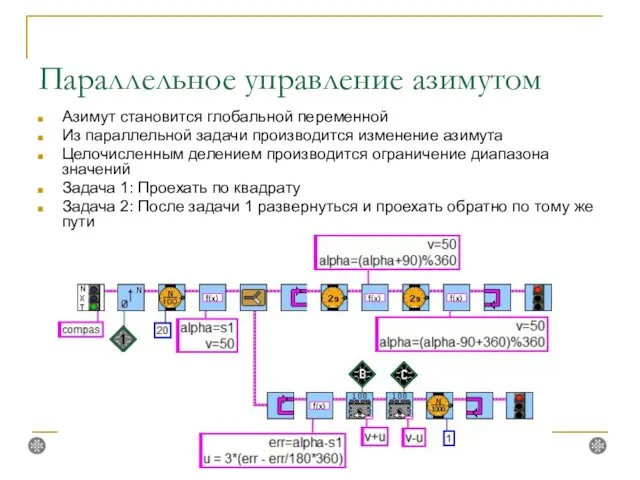
Параллельное управление азимутом
Азимут становится глобальной переменной
Из параллельной задачи производится изменение азимута
Целочисленным
Параллельное управление азимутом
Азимут становится глобальной переменной
Из параллельной задачи производится изменение азимута
Целочисленным
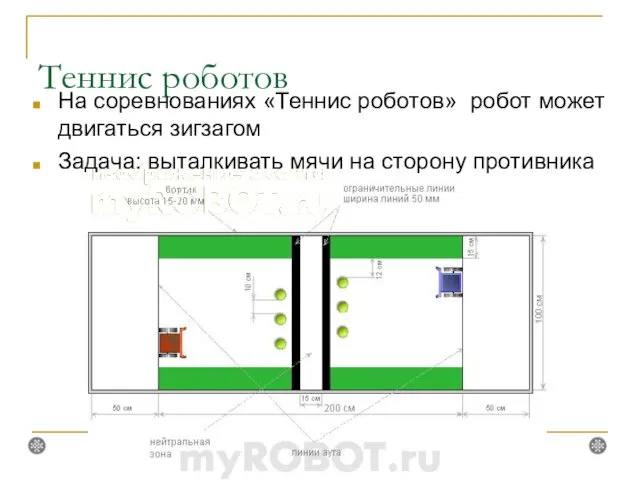
Теннис роботов
На соревнованиях «Теннис роботов» робот может двигаться зигзагом
Задача: выталкивать мячи
Теннис роботов
На соревнованиях «Теннис роботов» робот может двигаться зигзагом
Задача: выталкивать мячи
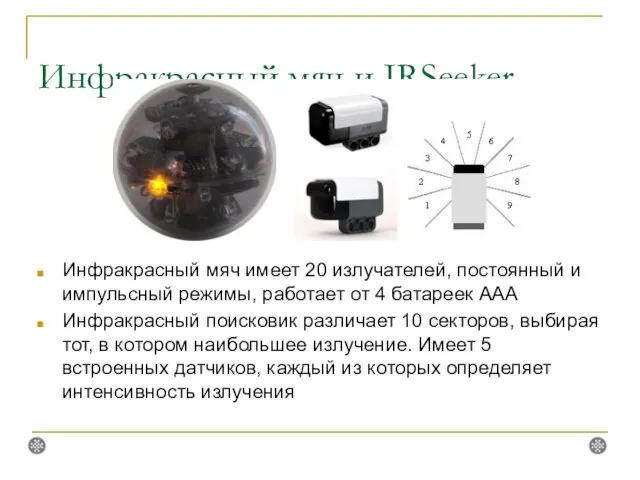
Инфракрасный мяч и IRSeeker
Инфракрасный мяч имеет 20 излучателей, постоянный и импульсный
Инфракрасный мяч и IRSeeker
Инфракрасный мяч имеет 20 излучателей, постоянный и импульсный
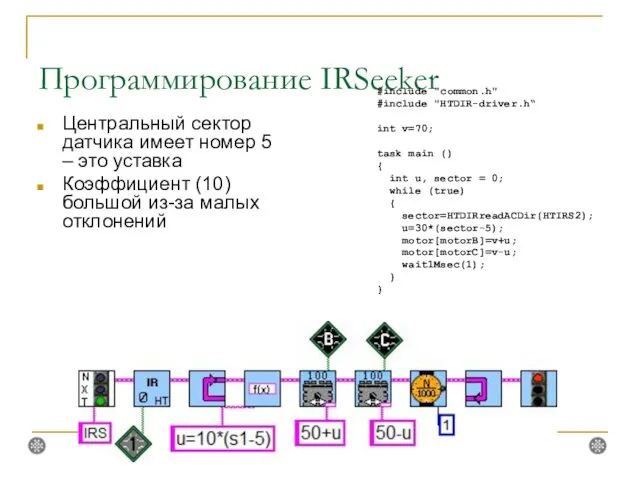
Программирование IRSeeker
Центральный сектор датчика имеет номер 5 – это уставка
Коэффициент (10)
Программирование IRSeeker
Центральный сектор датчика имеет номер 5 – это уставка
Коэффициент (10)
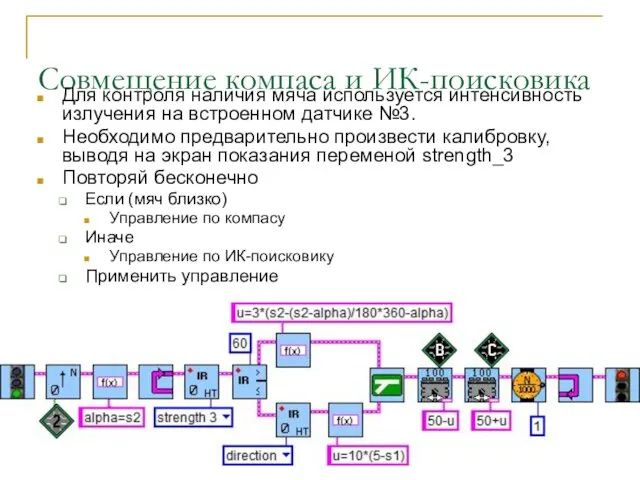
Совмещение компаса и ИК-поисковика
Для контроля наличия мяча используется интенсивность излучения на
Совмещение компаса и ИК-поисковика
Для контроля наличия мяча используется интенсивность излучения на
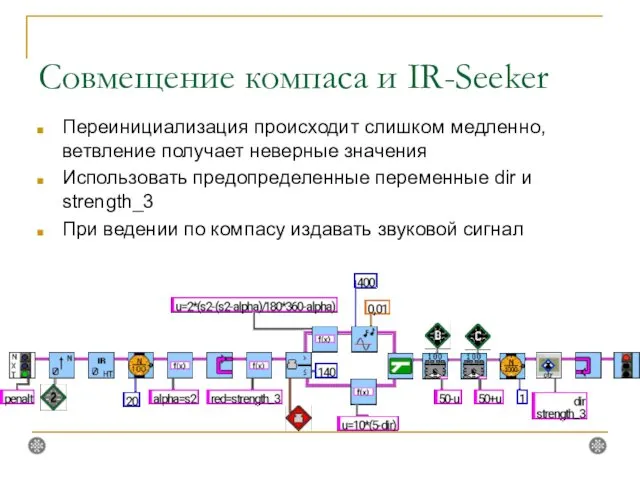
Совмещение компаса и IR-Seeker
Переинициализация происходит слишком медленно, ветвление получает неверные значения
Использовать
Совмещение компаса и IR-Seeker
Переинициализация происходит слишком медленно, ветвление получает неверные значения
Использовать
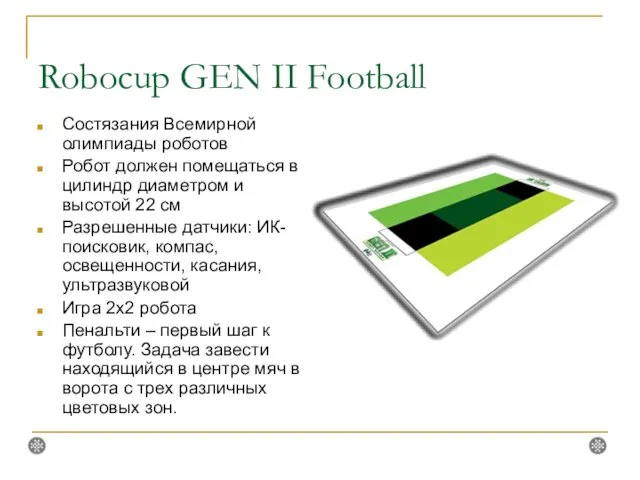
Robocup GEN II Football
Состязания Всемирной олимпиады роботов
Робот должен помещаться в цилиндр
Robocup GEN II Football
Состязания Всемирной олимпиады роботов
Робот должен помещаться в цилиндр
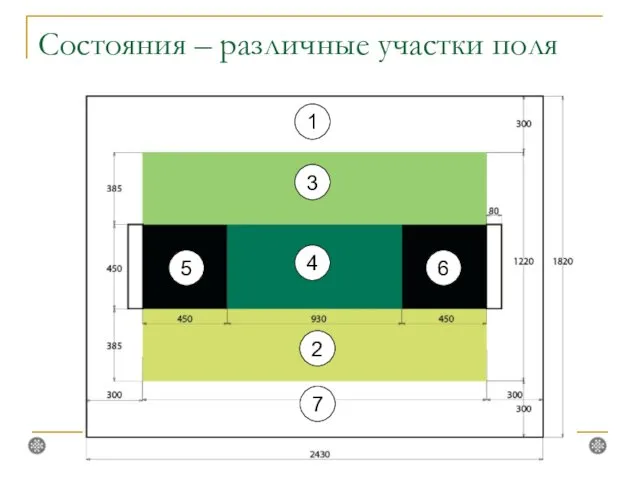
Состояния – различные участки поля
3
4
2
6
5
7
1
Состояния – различные участки поля
3
4
2
6
5
7
1
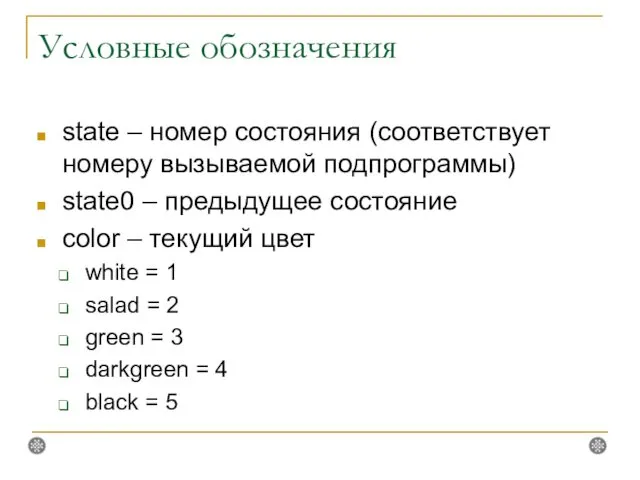
Условные обозначения
state – номер состояния (соответствует номеру вызываемой подпрограммы)
state0 – предыдущее
Условные обозначения
state – номер состояния (соответствует номеру вызываемой подпрограммы)
state0 – предыдущее
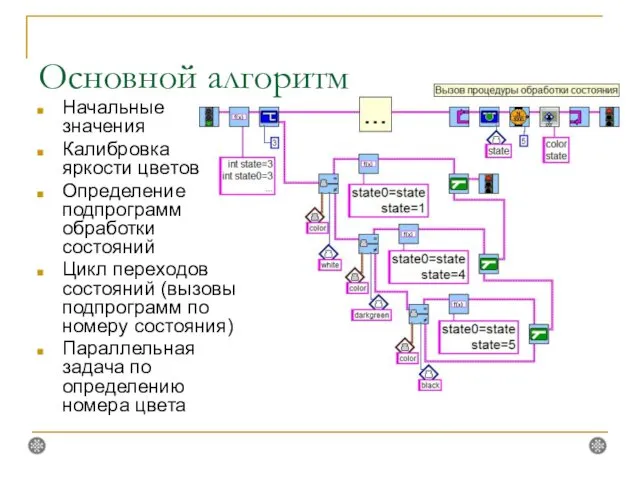
Основной алгоритм
Начальные значения
Калибровка яркости цветов
Определение подпрограмм обработки состояний
Цикл переходов состояний (вызовы
Основной алгоритм
Начальные значения
Калибровка яркости цветов
Определение подпрограмм обработки состояний
Цикл переходов состояний (вызовы
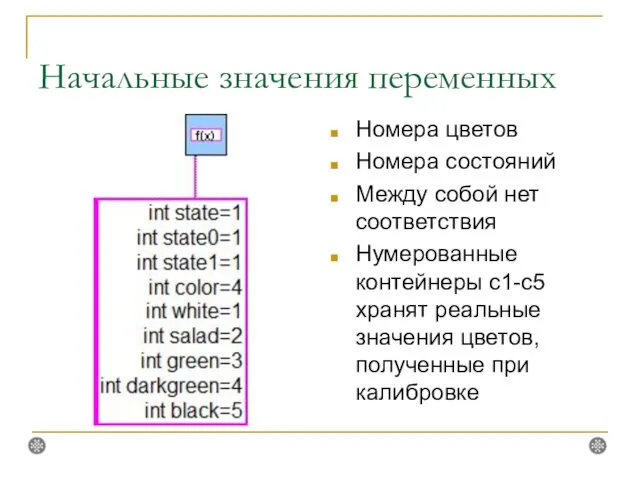
Начальные значения переменных
Номера цветов
Номера состояний
Между собой нет соответствия
Нумерованные контейнеры с1-с5 хранят
Начальные значения переменных
Номера цветов
Номера состояний
Между собой нет соответствия
Нумерованные контейнеры с1-с5 хранят
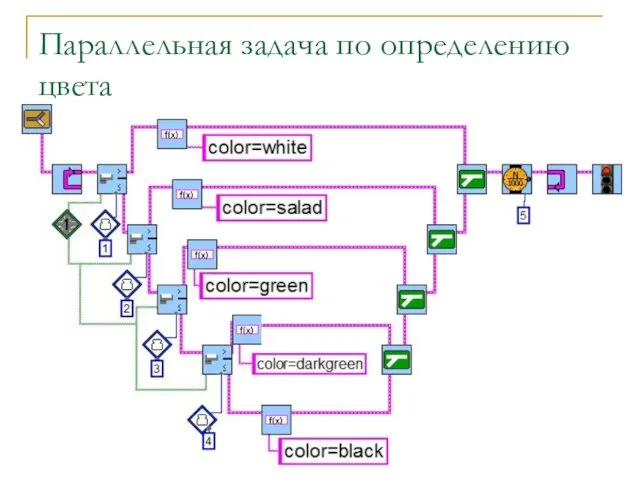
Параллельная задача по определению цвета
Параллельная задача по определению цвета
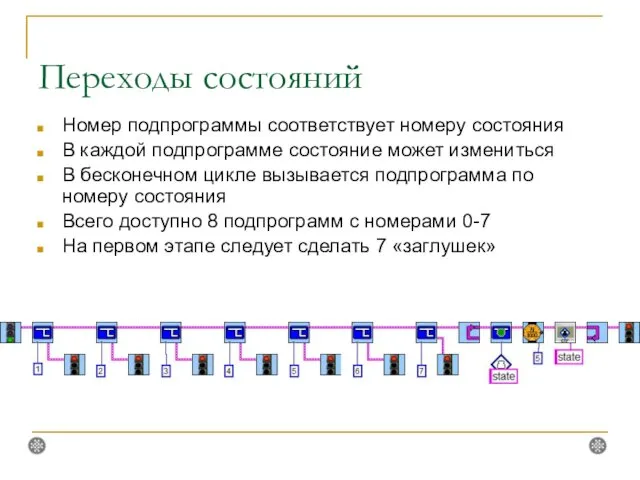
Переходы состояний
Номер подпрограммы соответствует номеру состояния
В каждой подпрограмме состояние может измениться
В
Переходы состояний
Номер подпрограммы соответствует номеру состояния
В каждой подпрограмме состояние может измениться
В
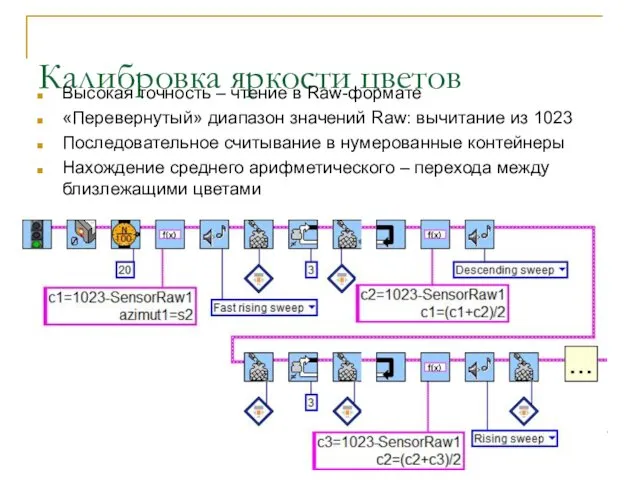
Калибровка яркости цветов
Высокая точность – чтение в Raw-формате
«Перевернутый» диапазон значений Raw:
Калибровка яркости цветов
Высокая точность – чтение в Raw-формате
«Перевернутый» диапазон значений Raw:
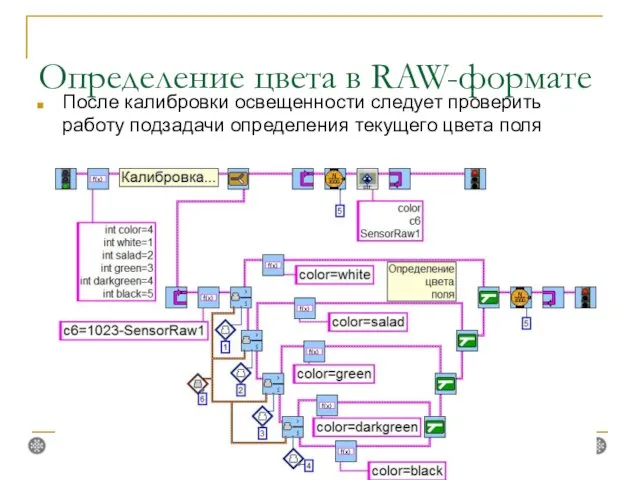
Определение цвета в RAW-формате
После калибровки освещенности следует проверить работу подзадачи определения
Определение цвета в RAW-формате
После калибровки освещенности следует проверить работу подзадачи определения
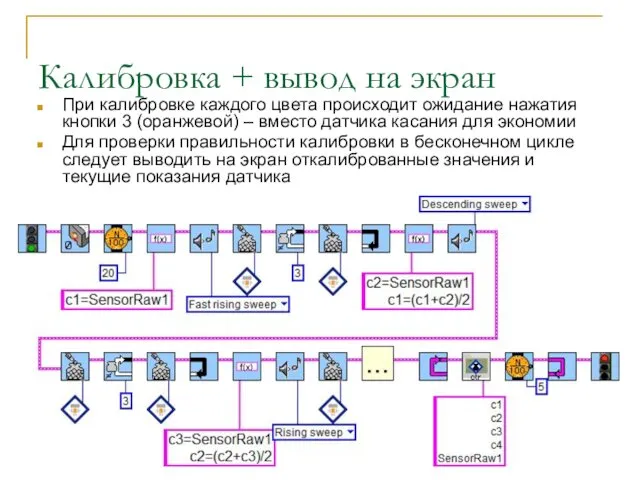
Калибровка + вывод на экран
При калибровке каждого цвета происходит ожидание нажатия
Калибровка + вывод на экран
При калибровке каждого цвета происходит ожидание нажатия
Создание своих блоков в Robolab
Вместо зеленого светофора: Create -> Control
Вместо красного
Создание своих блоков в Robolab
Вместо зеленого светофора: Create -> Control
Вместо красного
Применение блоков
Вставить свою пиктограмму через кнопку на палитре функций: Select VI
Или
Применение блоков
Вставить свою пиктограмму через кнопку на палитре функций: Select VI
Или
Объединение автомата и регулятора
При калибровке цвета в каждой зоне запоминать азимут
Объединение автомата и регулятора
При калибровке цвета в каждой зоне запоминать азимут
 Механизация крыла
Механизация крыла Кроссворды для знатоков физики
Кроссворды для знатоков физики Флагманская программа ассоциация военно-патриотических клубов Красноярского края
Флагманская программа ассоциация военно-патриотических клубов Красноярского края Аналіз та оцінка ефективності роботи системи контролю в Державній службі України з надзвичайних ситуацій
Аналіз та оцінка ефективності роботи системи контролю в Державній службі України з надзвичайних ситуацій Усадьба Деда Мороза 2011 г.
Усадьба Деда Мороза 2011 г. Регуляція клітинного циклу. (Лекція 3)
Регуляція клітинного циклу. (Лекція 3) Черные металлы
Черные металлы Основы электроники
Основы электроники Курсовая работа
Курсовая работа Сон ребенка
Сон ребенка Образы русской природы в стихотворениях С.Я. Маршака
Образы русской природы в стихотворениях С.Я. Маршака Острая сердечная недостаточность при инфаркте миокарда
Острая сердечная недостаточность при инфаркте миокарда Экология жилых помещений: Риск здоровью в собственном доме
Экология жилых помещений: Риск здоровью в собственном доме Поражение суставов при иммунодефицитных состоянии
Поражение суставов при иммунодефицитных состоянии презентация 5класс
презентация 5класс уроки географии 5 класс
уроки географии 5 класс Дымовые трубы ТЭС. Лекция 8
Дымовые трубы ТЭС. Лекция 8 Призентации Диск Диск
Призентации Диск Диск Жидкофазное спекание
Жидкофазное спекание Коран. Священні проповіді
Коран. Священні проповіді Пути преодоления солеотложения в установке электроцентробежного насоса
Пути преодоления солеотложения в установке электроцентробежного насоса Презентация Учимся работать вместе Диск
Презентация Учимся работать вместе Диск История государства и права древней Индии
История государства и права древней Индии Отчет о деятельности ПОС ИСИ за 2018 год
Отчет о деятельности ПОС ИСИ за 2018 год Адаптация – результат эволюции
Адаптация – результат эволюции викторина о Франции
викторина о Франции Отечество
Отечество Физическая культура для лиц с ОВЗ
Физическая культура для лиц с ОВЗ