- Интерфейсы. Стандарт CAN

Содержание
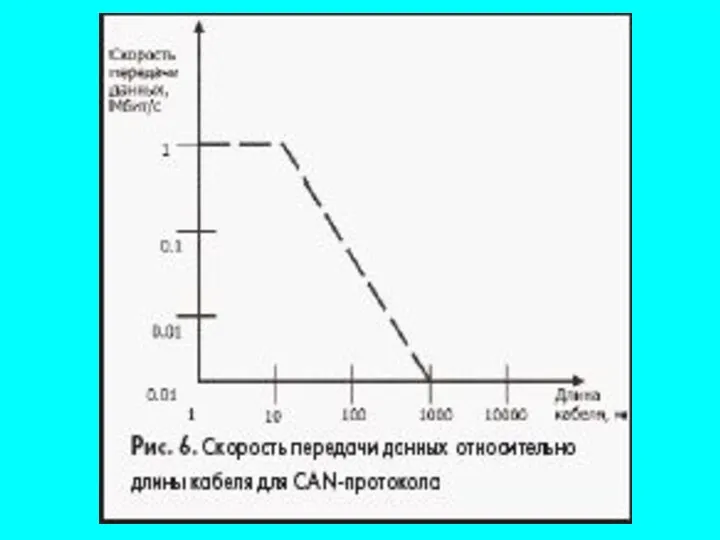
- 2. CAN – общие сведения Стандарт CAN (Control Area Network) был разработан фирмой Robert Bosch GmbH для
- 4. CAN - свойства каждое сообщение имеет определенный приоритет существуют гарантированные времена ожидания гибкость конфигурации групповой приём
- 6. BOSCH
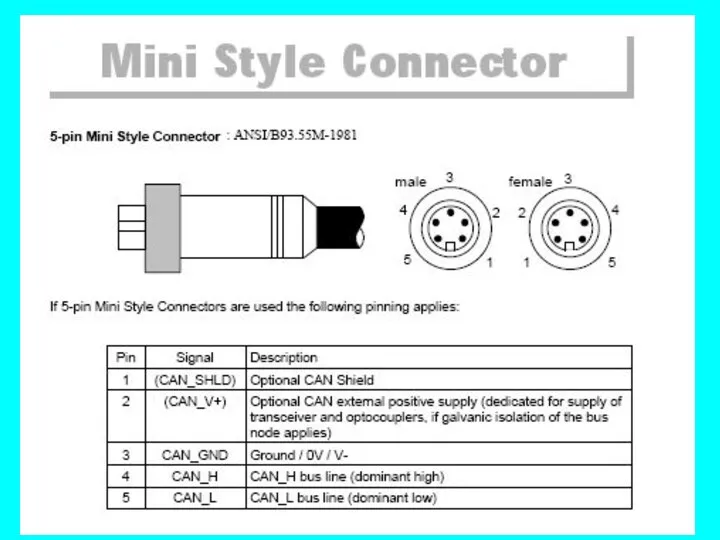
- 7. CAN BUS Transceiver
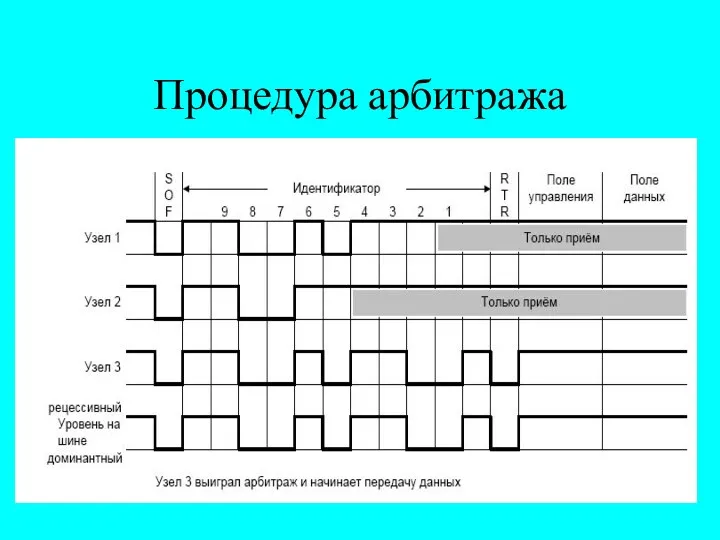
- 9. CAN – сведения об арбитраже Когда шина свободна, любой узел может начать передачу сообщения. Если два
- 10. Процедура арбитража
- 11. CAN – определение передатчика и приёмника Передатчик Узел, передающий сообщение называется передатчиком этого сообщения. Узел является
- 12. Кадры данных и запроса данных
- 13. CAN – стандартный формат фрейма данных Кадр данных состоит из 7 различных полей: "Начало кадра", "поле
- 15. CAN – старт фрейма и поле арбитража (по части A стандарта) Идентификатор (Identifier) Имеет длину 11
- 16. CAN – стандартный и расширенный форматы поля арбитража s I R s Extended Format T
- 17. CAN – различие полей арбитража в стандартном и расширенном форматах
- 18. CAN – формат управляющего поля В расширенном формате на месте доминантного бита r1 посылается рецессивный бит
- 19. CAN – кодировка длины поля данных
- 20. CAN – поле данных и поле CRC Для вычисления CRC полинома, полином, коэффициенты которого задаются потоком,
- 21. CAN – расчёт CRC, ограничитель CRC
- 22. Формирование CRC сдвигающим регистром 14 13 12 11 10 9 8 7 6 5 4 3
- 23. Кадр удаленного запроса
- 24. CAN – конец фрейма данных и удалённого запроса
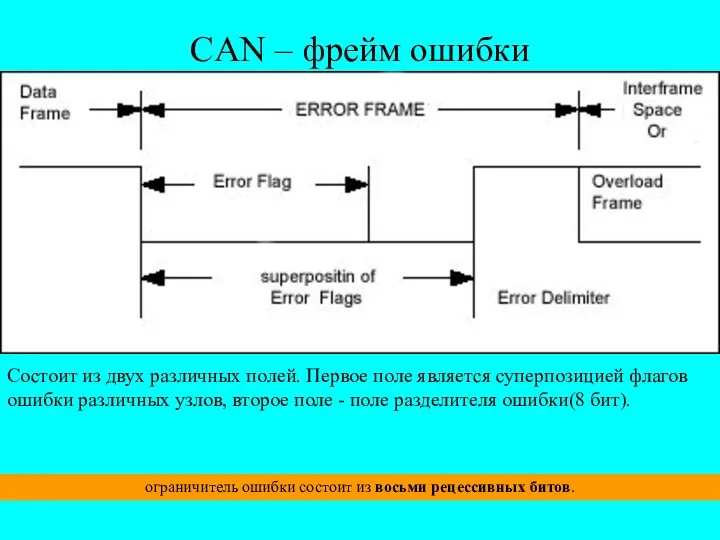
- 25. CAN – фрейм ошибки ограничитель ошибки состоит из восьми рецессивных битов. Состоит из двух различных полей.
- 26. CAN – пять видов ошибок 1.разрядная ошибка Узел, который посылает что - либо на шину также
- 27. CAN –флаг ошибки
- 28. CAN – фрейм перегрузки Имеются два вида перегрузки, которые оба приводят к передаче кадра перегрузки. 1.
- 29. CAN – межфреймовый промежуток Поле перерыва (Intermission) Состоит из 3 бит с лог. "1". В течение
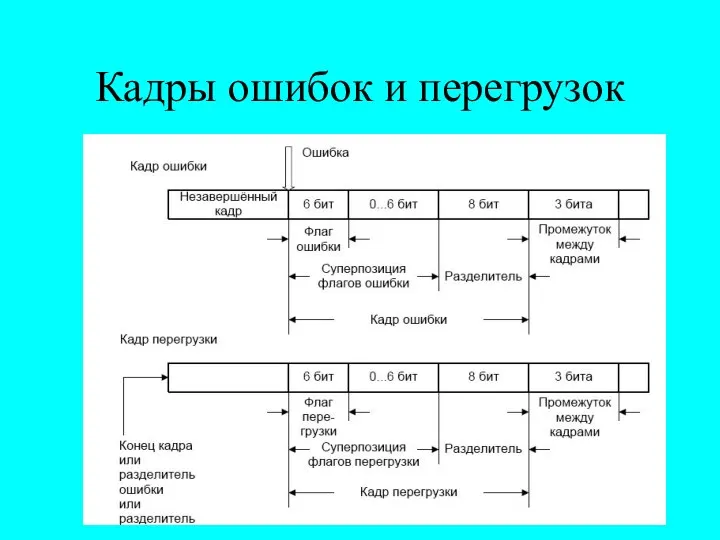
- 30. Кадры ошибок и перегрузок
- 31. CAN – особенности спящего режима Чтобы уменьшить потребляемую мощность системы, узел CAN может быть переведен в
- 32. Кодирование битового потока Следующие поля: "начало кадра", "поле арбитража", "поле контроля", "поле данных" и "поле CRC"
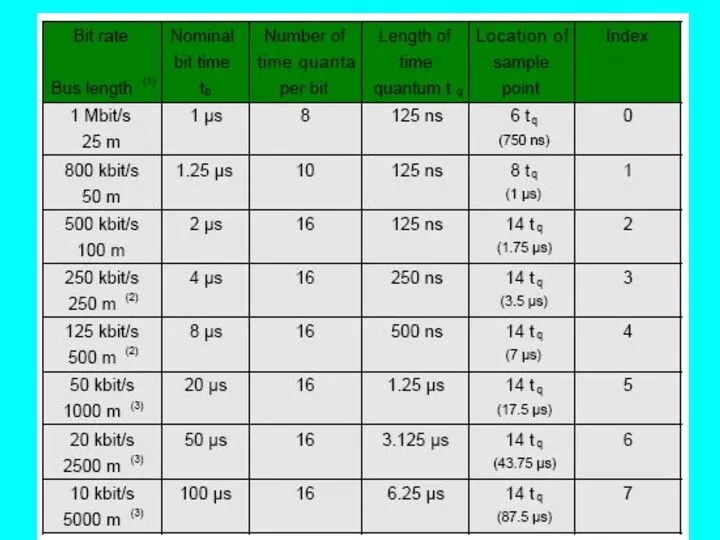
- 33. Требования к синхронизации SYNC SEG Эта часть времени передачи бита используется, чтобы синхронизировать различные узлы на
- 37. Скачать презентацию
CAN – общие сведения
Стандарт CAN (Control Area Network) был разработан фирмой
Robert
CAN – общие сведения
Стандарт CAN (Control Area Network) был разработан фирмой
Robert
CAN - свойства
каждое сообщение имеет определенный приоритет
существуют гарантированные времена ожидания
CAN - свойства
каждое сообщение имеет определенный приоритет
существуют гарантированные времена ожидания
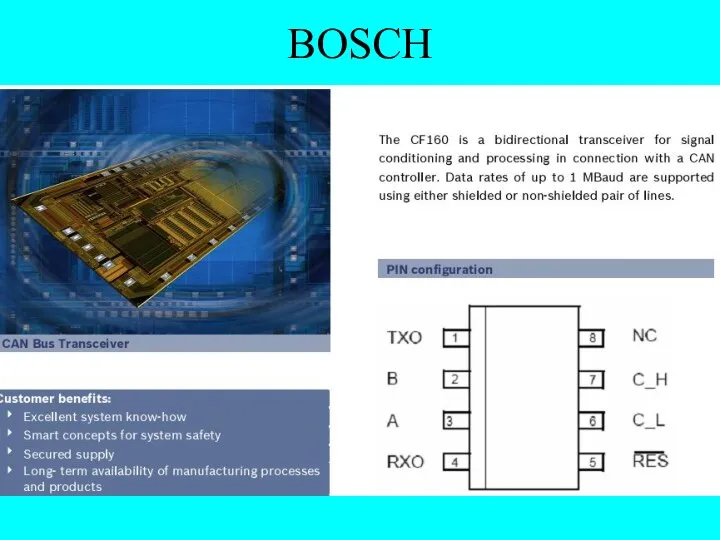
BOSCH
BOSCH
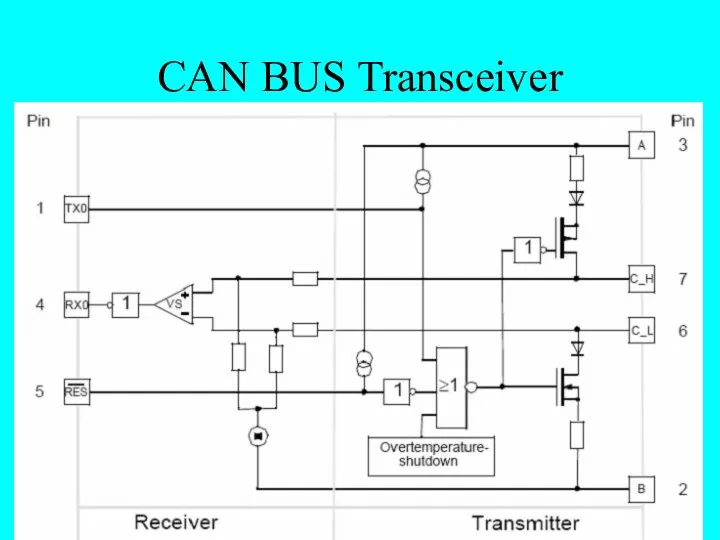
CAN BUS Transceiver
CAN BUS Transceiver
CAN – сведения об арбитраже
Когда шина свободна, любой узел может начать
CAN – сведения об арбитраже
Когда шина свободна, любой узел может начать
Процедура арбитража
Процедура арбитража
CAN – определение передатчика и приёмника
Передатчик
Узел, передающий сообщение называется передатчиком
CAN – определение передатчика и приёмника
Передатчик
Узел, передающий сообщение называется передатчиком

Кадры данных и запроса данных
Кадры данных и запроса данных
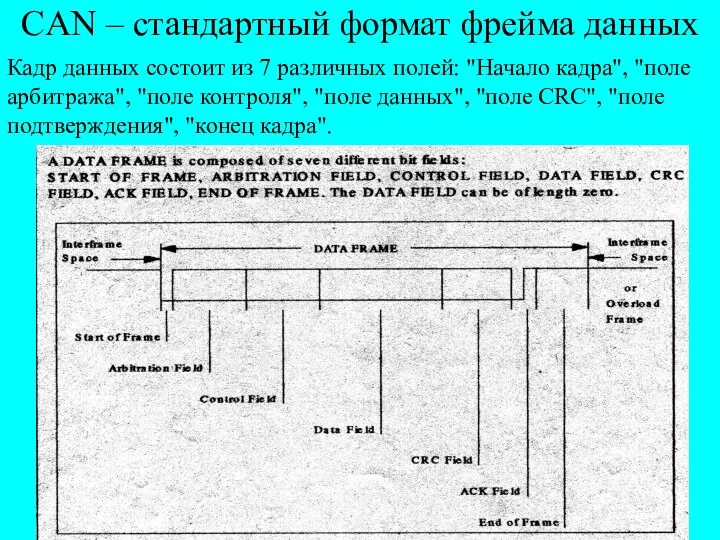
CAN – стандартный формат фрейма данных
Кадр данных состоит из 7 различных
CAN – стандартный формат фрейма данных
Кадр данных состоит из 7 различных
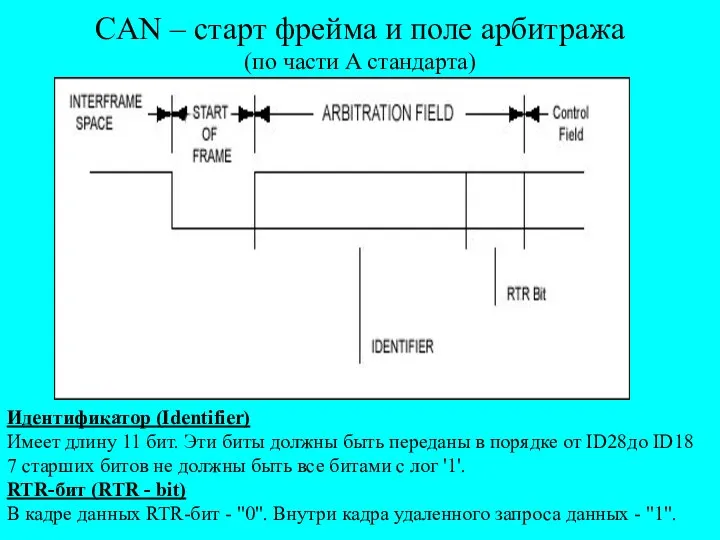
CAN – старт фрейма и поле арбитража
(по части A стандарта)
Идентификатор (Identifier)
Имеет
CAN – старт фрейма и поле арбитража
(по части A стандарта)
Идентификатор (Identifier)
Имеет
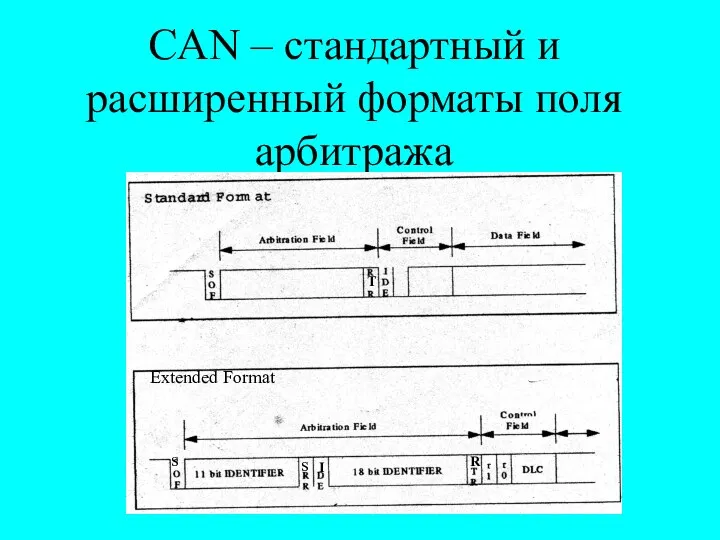
CAN – стандартный и
расширенный форматы поля арбитража
s
I
R
s
Extended Format
T
CAN – стандартный и
расширенный форматы поля арбитража
s
I
R
s
Extended Format
T
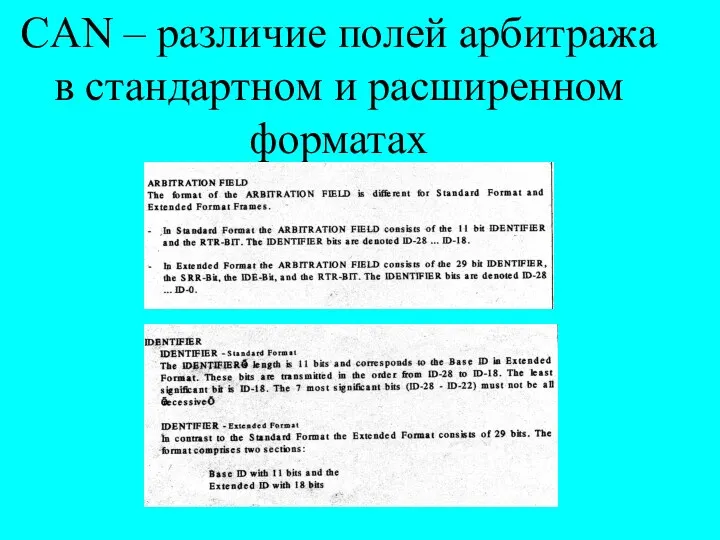
CAN – различие полей арбитража
в стандартном и расширенном
форматах
CAN – различие полей арбитража
в стандартном и расширенном
форматах
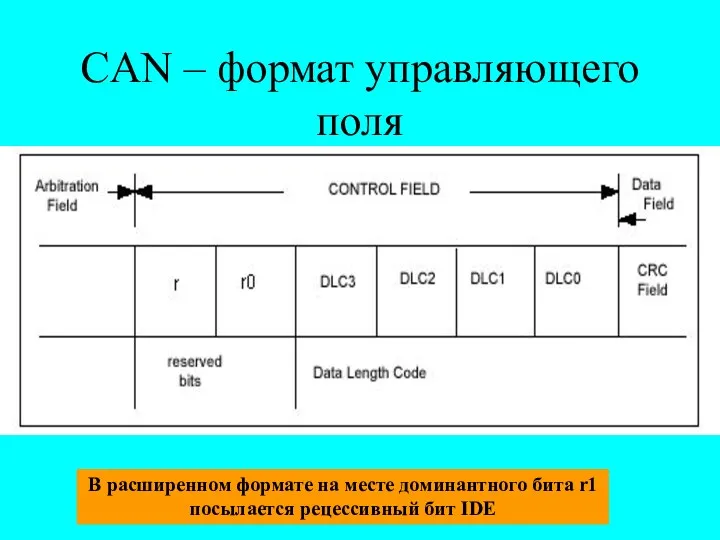
CAN – формат управляющего поля
В расширенном формате на месте доминантного бита
CAN – формат управляющего поля
В расширенном формате на месте доминантного бита
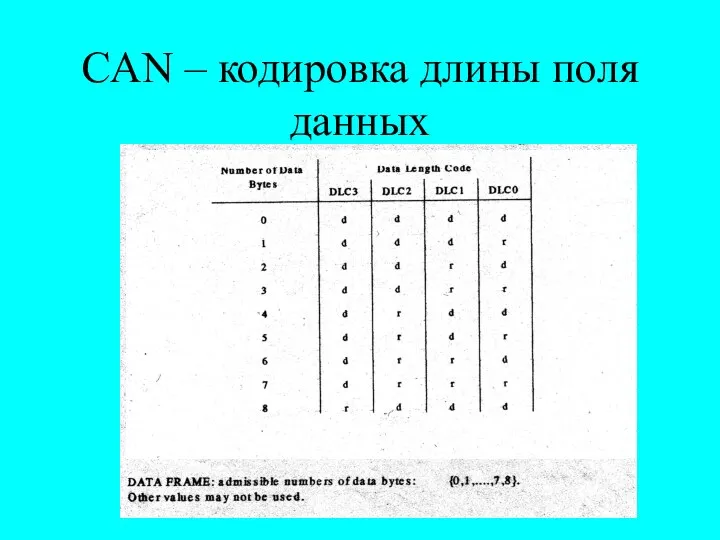
CAN – кодировка длины поля данных
CAN – кодировка длины поля данных
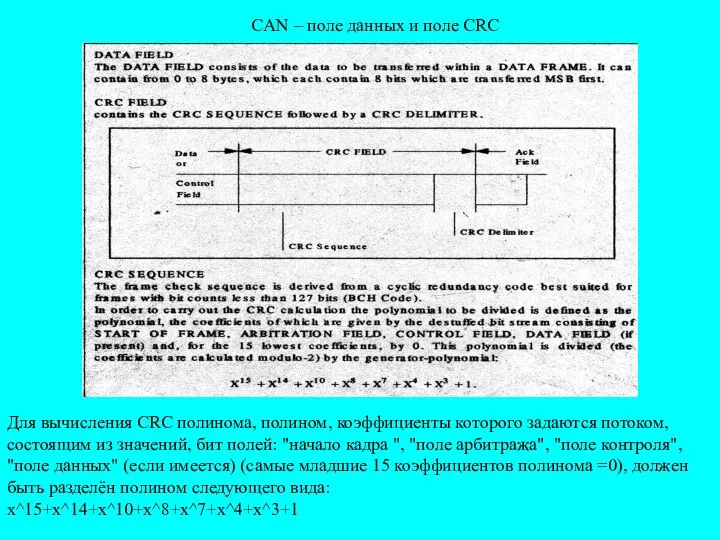
CAN – поле данных и поле CRC
Для вычисления CRC полинома, полином,
CAN – поле данных и поле CRC
Для вычисления CRC полинома, полином,
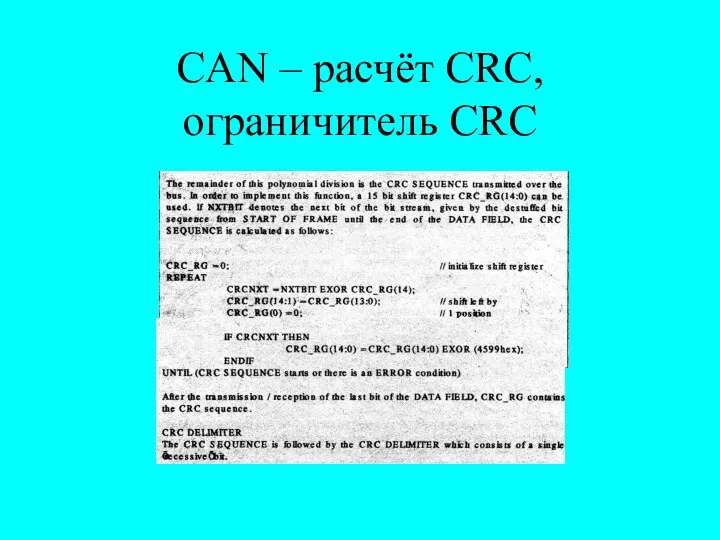
CAN – расчёт CRC,
ограничитель CRC
CAN – расчёт CRC,
ограничитель CRC
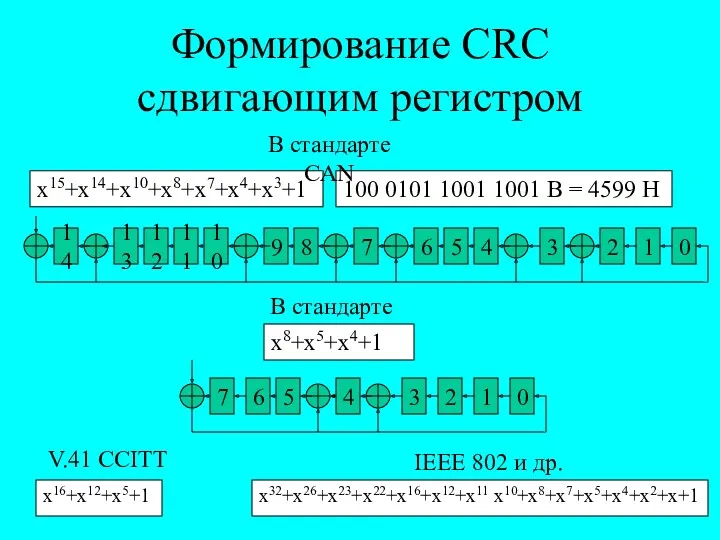
Формирование CRC
сдвигающим регистром
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
x15+x14+x10+x8+x7+x4+x3+1
100 0101 1001 1001 B = 4599 H
7
6
5
4
3
2
1
0
В
Формирование CRC
сдвигающим регистром
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
x15+x14+x10+x8+x7+x4+x3+1
100 0101 1001 1001 B = 4599 H
7
6
5
4
3
2
1
0
В
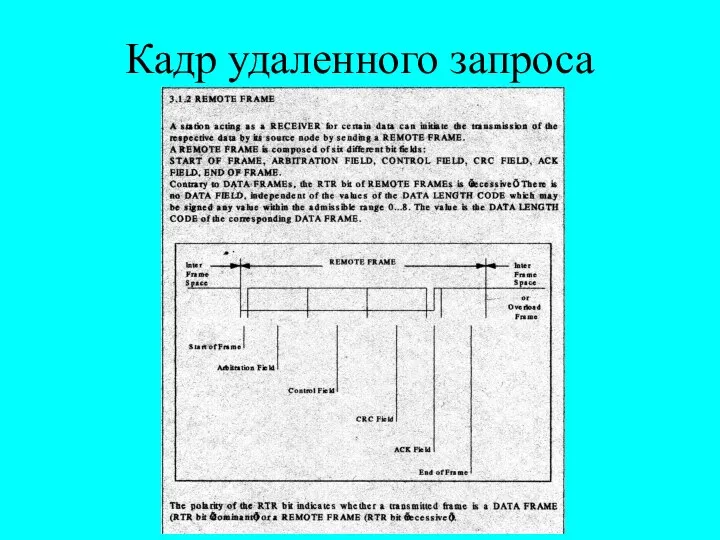
Кадр удаленного запроса
Кадр удаленного запроса
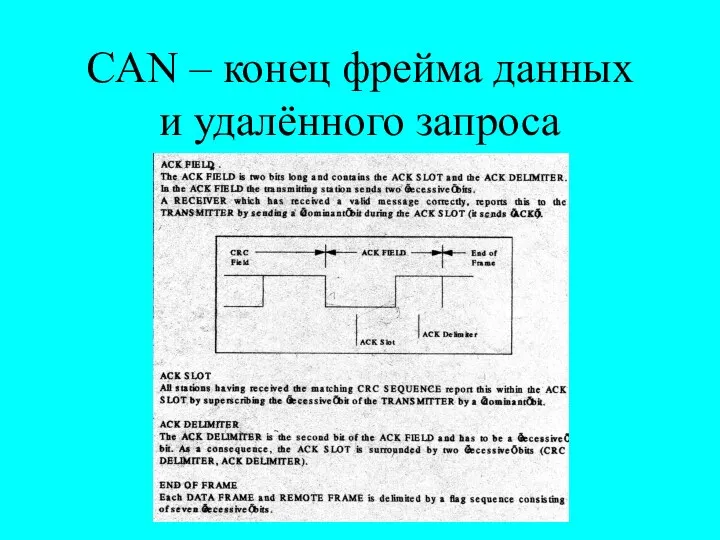
CAN – конец фрейма данных
и удалённого запроса
CAN – конец фрейма данных
и удалённого запроса
CAN – фрейм ошибки
ограничитель ошибки состоит из восьми рецессивных битов.
Состоит
CAN – фрейм ошибки
ограничитель ошибки состоит из восьми рецессивных битов.
Состоит
CAN – пять видов ошибок
1.разрядная ошибка
Узел, который посылает что -
CAN – пять видов ошибок
1.разрядная ошибка
Узел, который посылает что -
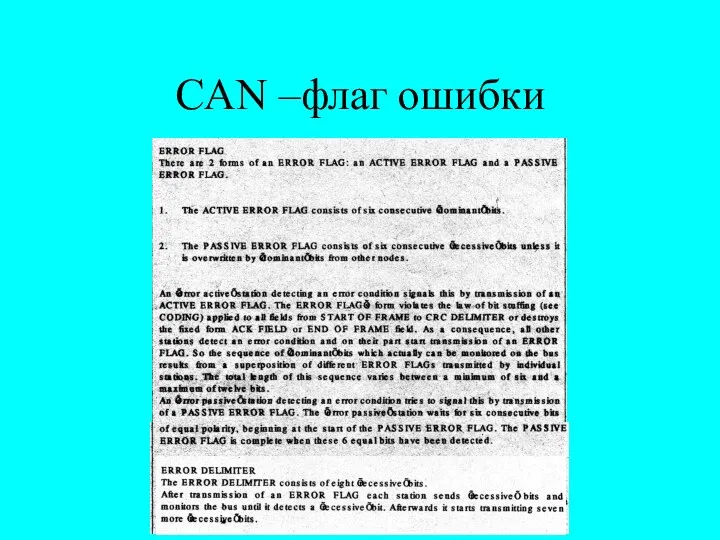
CAN –флаг ошибки
CAN –флаг ошибки
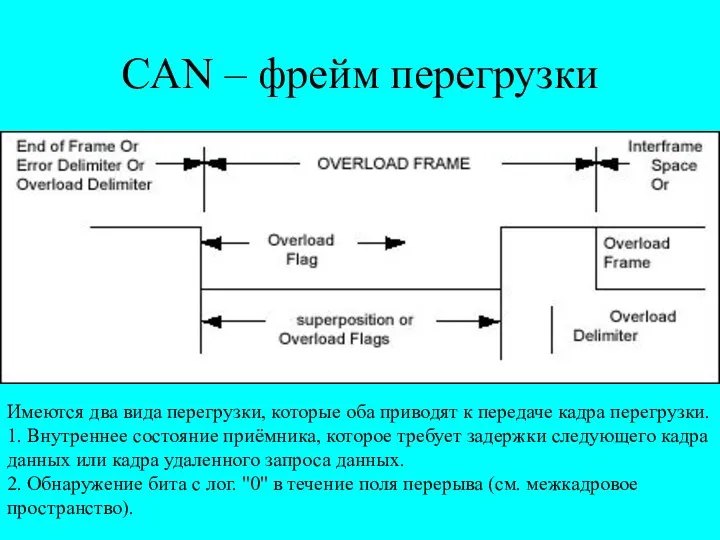
CAN – фрейм перегрузки
Имеются два вида перегрузки, которые оба приводят к
CAN – фрейм перегрузки
Имеются два вида перегрузки, которые оба приводят к
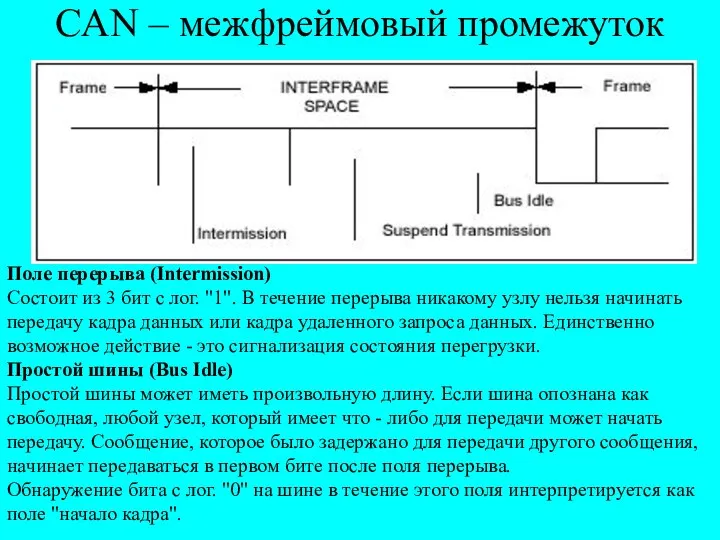
CAN – межфреймовый промежуток
Поле перерыва (Intermission)
Состоит из 3 бит с лог.
CAN – межфреймовый промежуток
Поле перерыва (Intermission)
Состоит из 3 бит с лог.
Кадры ошибок и перегрузок
Кадры ошибок и перегрузок
CAN – особенности спящего режима
Чтобы уменьшить потребляемую мощность системы, узел CAN
CAN – особенности спящего режима
Чтобы уменьшить потребляемую мощность системы, узел CAN
Кодирование битового потока
Следующие поля: "начало кадра", "поле арбитража", "поле контроля", "поле
Кодирование битового потока
Следующие поля: "начало кадра", "поле арбитража", "поле контроля", "поле
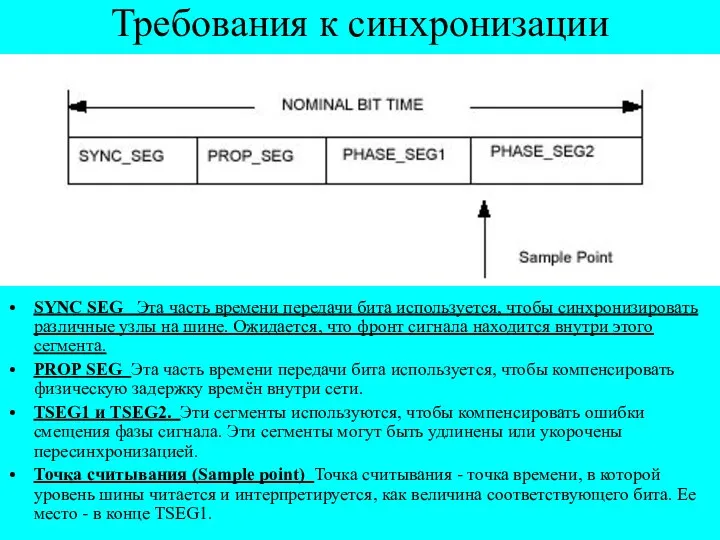
Требования к синхронизации
SYNC SEG Эта часть времени передачи бита используется, чтобы
Требования к синхронизации
SYNC SEG Эта часть времени передачи бита используется, чтобы
 Сервировка стола к обеду
Сервировка стола к обеду Сексуализированное поведение детей
Сексуализированное поведение детей Музеи Москвы. Палеонтологический музей.
Музеи Москвы. Палеонтологический музей. Hellp-синдром
Hellp-синдром Поняття методики історичного джерелознавства
Поняття методики історичного джерелознавства Иероним Босх (около 1460-1516гг.)
Иероним Босх (около 1460-1516гг.) Поворот. Означення повороту
Поворот. Означення повороту System of government
System of government Монолог-рассуждение о влиянии наркотических веществ на организм человека
Монолог-рассуждение о влиянии наркотических веществ на организм человека Физические основы электроэнергетики. Лекция 6
Физические основы электроэнергетики. Лекция 6 Заболевания носоглотки у детей
Заболевания носоглотки у детей Здоровьесберегающие технологии в работе музыкального руководителя (из опыта работы).
Здоровьесберегающие технологии в работе музыкального руководителя (из опыта работы). Загальні основи педагогіки вищої школи
Загальні основи педагогіки вищої школи Строительство асфальтобетонного покрытия
Строительство асфальтобетонного покрытия Захист нафтогазопромислового обладнання від корозії з використанням інгібіторів. Оцінка ефективності дії інгібіторів
Захист нафтогазопромислового обладнання від корозії з використанням інгібіторів. Оцінка ефективності дії інгібіторів Хикикомори
Хикикомори Методы опроса, контроля школьников на уроках математики
Методы опроса, контроля школьников на уроках математики Стандартизація продукції тваринництва
Стандартизація продукції тваринництва Present Continuous Tense
Present Continuous Tense  Неопределенная форма глагола - инфинитив
Неопределенная форма глагола - инфинитив Животноводство в нашем крае
Животноводство в нашем крае Аксессуары, их роль в создании имиджа
Аксессуары, их роль в создании имиджа История развития органической химии
История развития органической химии Физические основы микроэлектроники. Радиоматериалы и радиокомпоненты
Физические основы микроэлектроники. Радиоматериалы и радиокомпоненты Ядовитые растения, их значение
Ядовитые растения, их значение производство серной кислоты
производство серной кислоты Многоступечатый привод. Универсальные приводы
Многоступечатый привод. Универсальные приводы Поздравительные грамоты
Поздравительные грамоты