- Кинематика (продолжение). Основы динамики. Лекция 2

Содержание
- 2. План лекции
- 3. Введение В начале лекции 2 будет продолжено изучение раздела «Кинематика» как одного из основ механики. Будет
- 4. Раздел 1. Кинематика движения по окружности
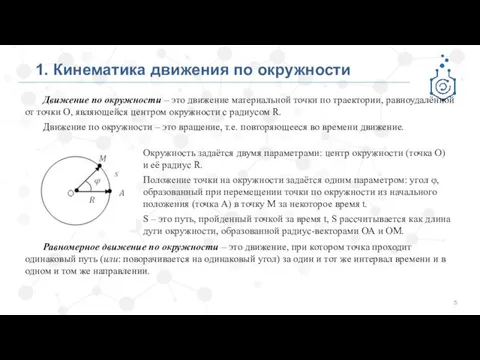
- 5. 1. Кинематика движения по окружности Движение по окружности – это движение материальной точки по траектории, равноудалённой
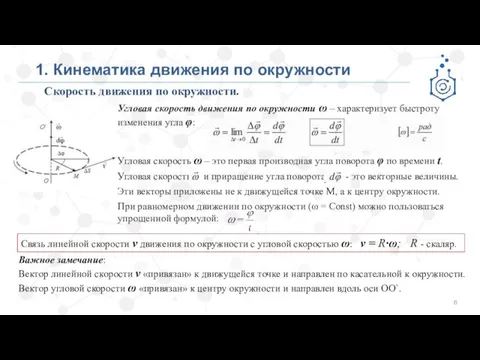
- 6. 1. Кинематика движения по окружности Скорость движения по окружности. Угловая скорость движения по окружности ω –
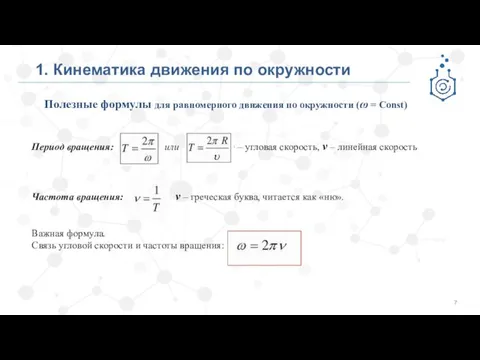
- 7. 1. Кинематика движения по окружности Полезные формулы для равномерного движения по окружности (ω = Const) Период
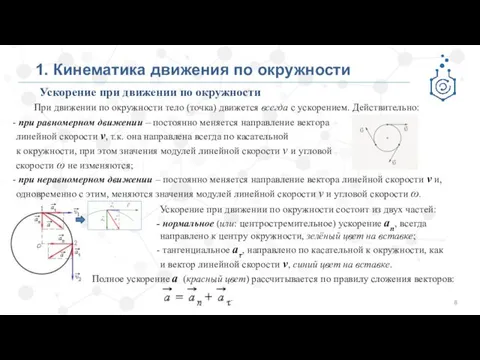
- 8. 1. Кинематика движения по окружности Ускорение при движении по окружности При движении по окружности тело (точка)
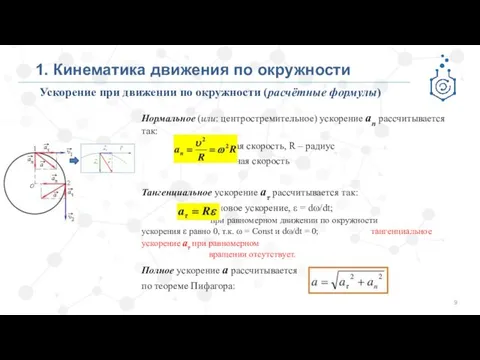
- 9. 1. Кинематика движения по окружности Ускорение при движении по окружности (расчётные формулы) Нормальное (или: центростремительное) ускорение
- 10. Раздел 2. Динамика. Первый закон Ньютона
- 11. 2. Динамика. Первый закон Ньютона Динамика – раздел механики, изучает взаимодействие между телами, которое осуществляется посредством
- 12. Раздел 3. Динамика. Второй закон Ньютона
- 13. 3. Динамика. Второй закон Ньютона Сила Сила – это механическое воздействие на рассматриваемое тело со стороны
- 14. 3. Динамика. Второй закон Ньютона Масса Масса – это физическая величина, характеризирующая инертность тела, т.е. его
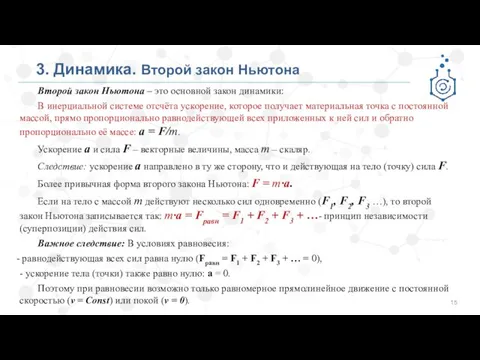
- 15. 3. Динамика. Второй закон Ньютона Второй закон Ньютона – это основной закон динамики: В инерциальной системе
- 16. Раздел 4. Динамика. Третий закон Ньютона
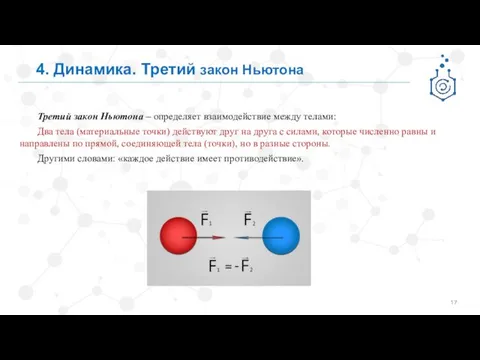
- 17. 4. Динамика. Третий закон Ньютона Третий закон Ньютона – определяет взаимодействие между телами: Два тела (материальные
- 18. 4. Динамика. Сводная таблица.
- 19. Раздел 5. Примеры сил.
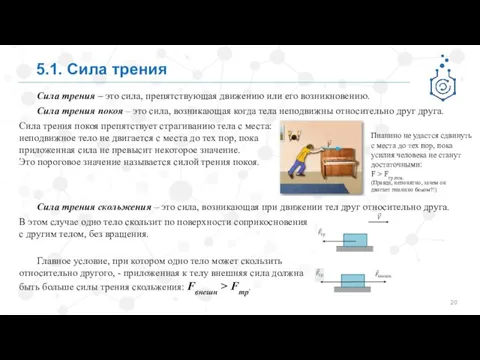
- 20. 5.1. Сила трения Сила трения – это сила, препятствующая движению или его возникновению. Сила трения покоя
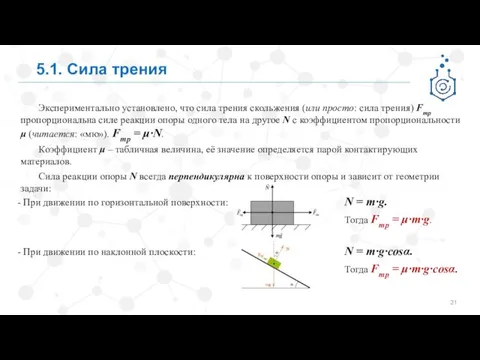
- 21. 5.1. Сила трения Экспериментально установлено, что сила трения скольжения (или просто: сила трения) Fтр пропорциональна силе
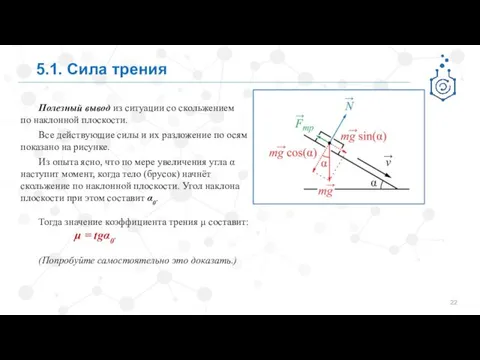
- 22. 5.1. Сила трения Полезный вывод из ситуации со скольжением по наклонной плоскости. Все действующие силы и
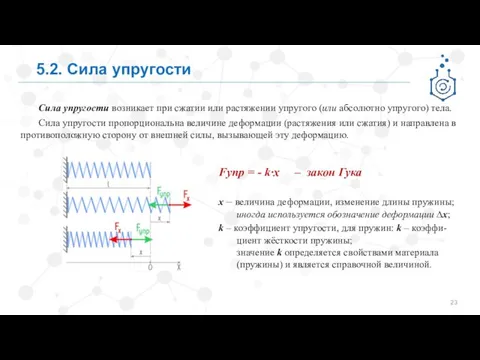
- 23. 5.2. Сила упругости Сила упругости возникает при сжатии или растяжении упругого (или абсолютно упругого) тела. Сила
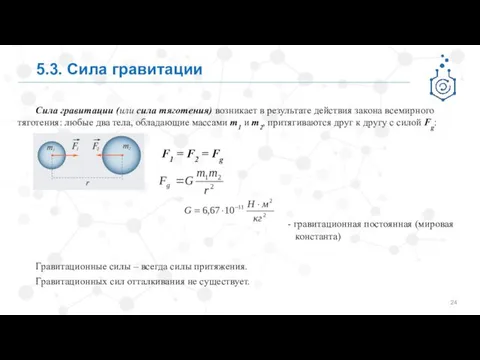
- 24. 5.3. Сила гравитации Сила гравитации (или сила тяготения) возникает в результате действия закона всемирного тяготения: любые
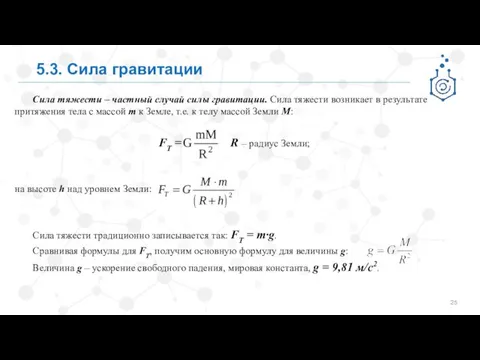
- 25. 5.3. Сила гравитации Сила тяжести – частный случай силы гравитации. Сила тяжести возникает в результате притяжения
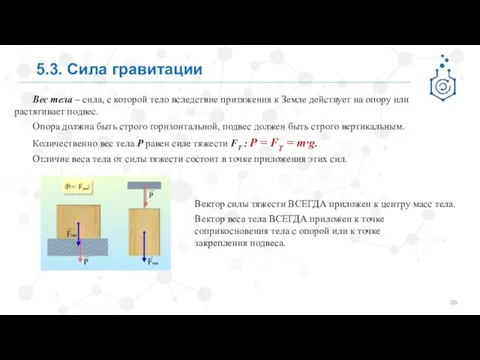
- 26. 5.3. Сила гравитации Вес тела – сила, с которой тело вследствие притяжения к Земле действует на
- 28. Скачать презентацию
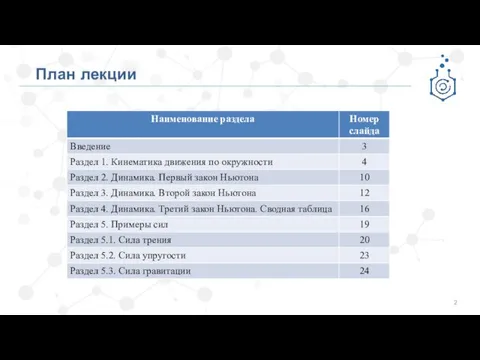
План лекции
План лекции
Введение
В начале лекции 2 будет продолжено изучение раздела «Кинематика» как
Введение
В начале лекции 2 будет продолжено изучение раздела «Кинематика» как
Раздел 1. Кинематика движения по окружности
Раздел 1. Кинематика движения по окружности
1. Кинематика движения по окружности
Движение по окружности – это движение материальной
1. Кинематика движения по окружности
Движение по окружности – это движение материальной
1. Кинематика движения по окружности
Скорость движения по окружности.
Угловая скорость движения по
1. Кинематика движения по окружности
Скорость движения по окружности.
Угловая скорость движения по
1. Кинематика движения по окружности
Полезные формулы для равномерного движения по окружности
1. Кинематика движения по окружности
Полезные формулы для равномерного движения по окружности
1. Кинематика движения по окружности
Ускорение при движении по окружности
При движении по
1. Кинематика движения по окружности
Ускорение при движении по окружности
При движении по
1. Кинематика движения по окружности
Ускорение при движении по окружности (расчётные формулы)
Нормальное
1. Кинематика движения по окружности
Ускорение при движении по окружности (расчётные формулы)
Нормальное
Раздел 2. Динамика. Первый закон Ньютона
Раздел 2. Динамика. Первый закон Ньютона
2. Динамика. Первый закон Ньютона
Динамика – раздел механики, изучает взаимодействие между
2. Динамика. Первый закон Ньютона
Динамика – раздел механики, изучает взаимодействие между
Раздел 3. Динамика. Второй закон Ньютона
Раздел 3. Динамика. Второй закон Ньютона

3. Динамика. Второй закон Ньютона
Сила
Сила – это механическое воздействие на рассматриваемое
3. Динамика. Второй закон Ньютона
Сила
Сила – это механическое воздействие на рассматриваемое
3. Динамика. Второй закон Ньютона
Масса
Масса – это физическая величина, характеризирующая инертность
3. Динамика. Второй закон Ньютона
Масса
Масса – это физическая величина, характеризирующая инертность
3. Динамика. Второй закон Ньютона
Второй закон Ньютона – это основной закон
3. Динамика. Второй закон Ньютона
Второй закон Ньютона – это основной закон
Раздел 4. Динамика. Третий закон Ньютона
Раздел 4. Динамика. Третий закон Ньютона
4. Динамика. Третий закон Ньютона
Третий закон Ньютона – определяет взаимодействие между
4. Динамика. Третий закон Ньютона
Третий закон Ньютона – определяет взаимодействие между
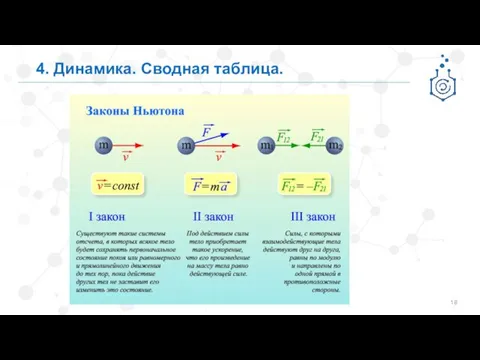
4. Динамика. Сводная таблица.
4. Динамика. Сводная таблица.
Раздел 5. Примеры сил.
Раздел 5. Примеры сил.
5.1. Сила трения
Сила трения – это сила, препятствующая движению или его
5.1. Сила трения
Сила трения – это сила, препятствующая движению или его
5.1. Сила трения
Экспериментально установлено, что сила трения скольжения (или просто: сила
5.1. Сила трения
Экспериментально установлено, что сила трения скольжения (или просто: сила
5.1. Сила трения
Полезный вывод из ситуации со скольжением
по наклонной плоскости.
Все
5.1. Сила трения
Полезный вывод из ситуации со скольжением
по наклонной плоскости.
Все
5.2. Сила упругости
Сила упругости возникает при сжатии или растяжении упругого (или
5.2. Сила упругости
Сила упругости возникает при сжатии или растяжении упругого (или
5.3. Сила гравитации
Сила гравитации (или сила тяготения) возникает в результате действия
5.3. Сила гравитации
Сила гравитации (или сила тяготения) возникает в результате действия
5.3. Сила гравитации
Сила тяжести – частный случай силы гравитации. Сила тяжести
5.3. Сила гравитации
Сила тяжести – частный случай силы гравитации. Сила тяжести
5.3. Сила гравитации
Вес тела – сила, с которой тело вследствие притяжения
5.3. Сила гравитации
Вес тела – сила, с которой тело вследствие притяжения
 Off activities
Off activities Информация, свойства, системы счисления, измерение и представление текстовой и графической информации
Информация, свойства, системы счисления, измерение и представление текстовой и графической информации Основні положення законодавства України щодо внутрішнього переміщення та захисту прав людини ВПО
Основні положення законодавства України щодо внутрішнього переміщення та захисту прав людини ВПО Основные элементы налога
Основные элементы налога Антиген
Антиген Изображение и обозначение резьбы
Изображение и обозначение резьбы Страны Западной и Центральной Африки. Нигерия
Страны Западной и Центральной Африки. Нигерия Развитие фонематического слуха у детей старшего дошкольного возраста
Развитие фонематического слуха у детей старшего дошкольного возраста Математика. Теория вероятностей
Математика. Теория вероятностей Наблюдения и опыты
Наблюдения и опыты Открытое собрание студенческого совета ХТФ для I курса
Открытое собрание студенческого совета ХТФ для I курса Современные строительные материалы
Современные строительные материалы Конфликты человеческой души: интрапсихическая интерпретация
Конфликты человеческой души: интрапсихическая интерпретация матем 15.02
матем 15.02 Цифровые многоканальные телекоммуникационные системы
Цифровые многоканальные телекоммуникационные системы Составление программ рисования графических объектов в ЛогоМирах
Составление программ рисования графических объектов в ЛогоМирах Презентация по подготовке к проведению сейсморазведочных работ в Аральском море
Презентация по подготовке к проведению сейсморазведочных работ в Аральском море Растениеводство в нашем крае. 4 класс
Растениеводство в нашем крае. 4 класс Игра Ребусы. Животные
Игра Ребусы. Животные Медициналық қызмет көлемі және құрылысы
Медициналық қызмет көлемі және құрылысы Музей Метрополитен Нью Йорк
Музей Метрополитен Нью Йорк Көшбасшылық психологиясы
Көшбасшылық психологиясы Конструкция: часть и целое. Здание как сочетание различных объемов. Понятие модуля. 8 класс
Конструкция: часть и целое. Здание как сочетание различных объемов. Понятие модуля. 8 класс Разработка классного часа. Построим дом счастья.
Разработка классного часа. Построим дом счастья. Система счисления
Система счисления Кубанская область и Черноморская губерния (1900 - 1920)
Кубанская область и Черноморская губерния (1900 - 1920)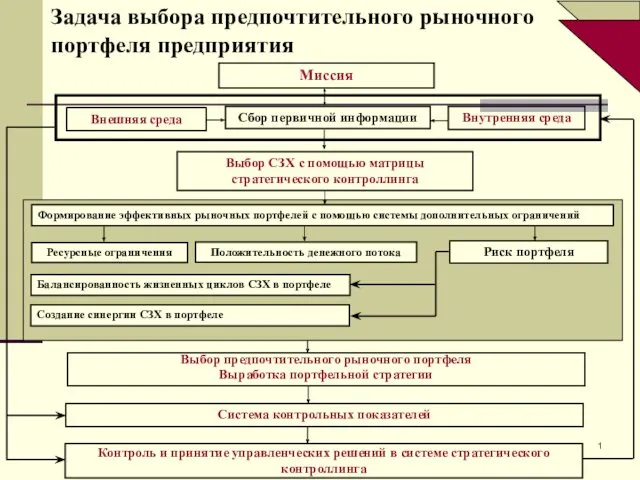 Задача выбора предпочтительного рыночного портфеля предприятия. Тема 5
Задача выбора предпочтительного рыночного портфеля предприятия. Тема 5 Внеклассное мероприятие с мультимедийной презентацией Тема: Пионеры – герои
Внеклассное мероприятие с мультимедийной презентацией Тема: Пионеры – герои