- Кинематика вращательного движения. Динамика поступательного движения

Содержание
- 2. Вращательное движение. В случае равномерного вращения тела формой траектории его материальных точек являются окружности радиусов Ri,
- 3. Пусть твёрдое тело вращается вокруг неподвижной в данной системе отсчёта оси OO’. ∆t- время бесконечно малого
- 4. В поступательном движении направление векторов скорости и ускорения выбирали исходя из их природы. Вектора направление которых
- 5. Угловая скорость – векторная величина, характеризующая быстроту вращения твердого тела, определяемую как приращение угла поворота тела
- 6. Вектор угловой скорости w может изменяться за счёт изменения скорости вращения тела вокруг оси (изменяется по
- 8. Связь линейных и угловых величин Найдём скорость v произвольной точки A твердого тела, вращающегося вокруг произвольной
- 9. Поделим на dt, и учитывая: получим: (*) Скорость v любой точки тела, вращающегося вокруг некоторой оси
- 10. Продифференцируем по времени и найдём полное ускорение: Т.к. ось вращения неподвижна, то aτ =[βr] Второе слагаемое:
- 11. Инерциальные системы отсчёта Динамика- изучает законы движения тел. В различных системах отсчёта законы механики имеют разный
- 12. Первый закон Ньютона – закон инерции: скорость любого тела остаётся постоянной, пока водействие на это тело
- 13. Предположение о существование хотя бы одной ИСО в пространстве приводит к выводу о существовании бесконечного множества
- 14. Однородность пространства относительно сдвигов даст закон сохранения импульса, изотропность приведёт к сохранению момента импульса, а однородноность
- 15. Пример однородности пространства, измерим период колебаний маятника, полученный результат обозначим как Т1. Теперь перенесем маятник в
- 16. Для количественной характеристики и оценки направления воздействия, оказываемого на данное тело со стороны других тел, вводятся
- 17. Из опыта: всякое тело «оказывает сопротивление» при любых попытках изменить его скорость по модулю или направлени.
- 18. Соотношение ma зависит как от состояния материальной точки, так и от состояния окружающих тел. Произведение массы
- 19. Действие тел друг на друга носит характер взаимодействия: если тело А сообщает ускорение телу В, то
- 21. Скачать презентацию
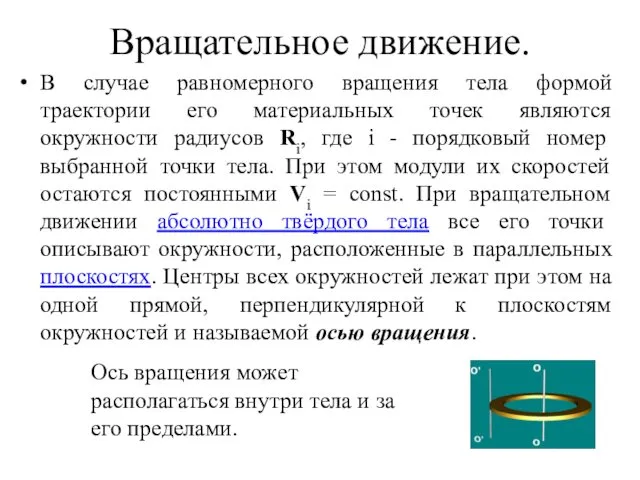
Вращательное движение.
В случае равномерного вращения тела формой траектории его материальных точек
Вращательное движение.
В случае равномерного вращения тела формой траектории его материальных точек
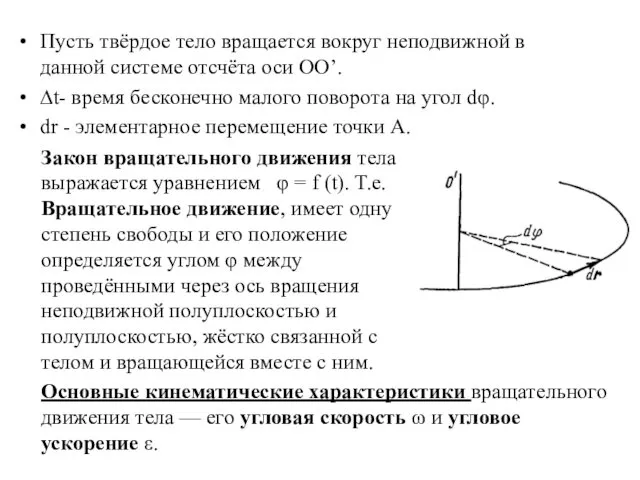
Пусть твёрдое тело вращается вокруг неподвижной в данной системе отсчёта оси
Пусть твёрдое тело вращается вокруг неподвижной в данной системе отсчёта оси
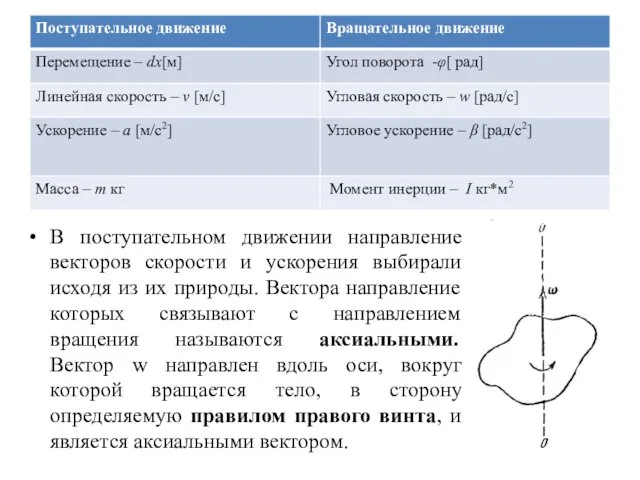
В поступательном движении направление векторов скорости и ускорения выбирали исходя из
В поступательном движении направление векторов скорости и ускорения выбирали исходя из
Угловая скорость – векторная величина, характеризующая быстроту вращения твердого тела, определяемую
Угловая скорость – векторная величина, характеризующая быстроту вращения твердого тела, определяемую
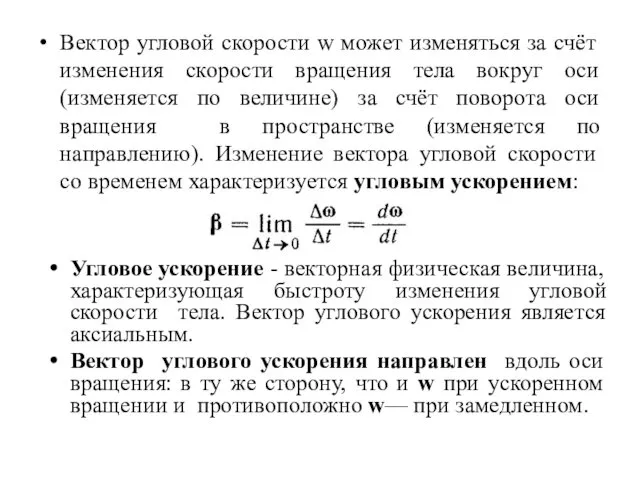
Вектор угловой скорости w может изменяться за счёт изменения скорости вращения
Вектор угловой скорости w может изменяться за счёт изменения скорости вращения
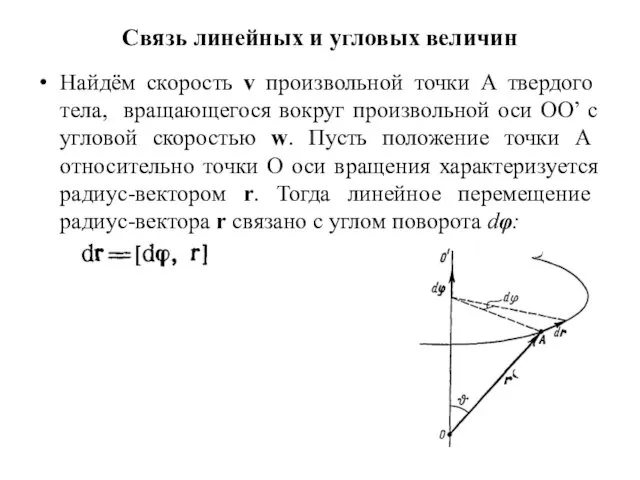
Связь линейных и угловых величин
Найдём скорость v произвольной точки A твердого
Связь линейных и угловых величин
Найдём скорость v произвольной точки A твердого
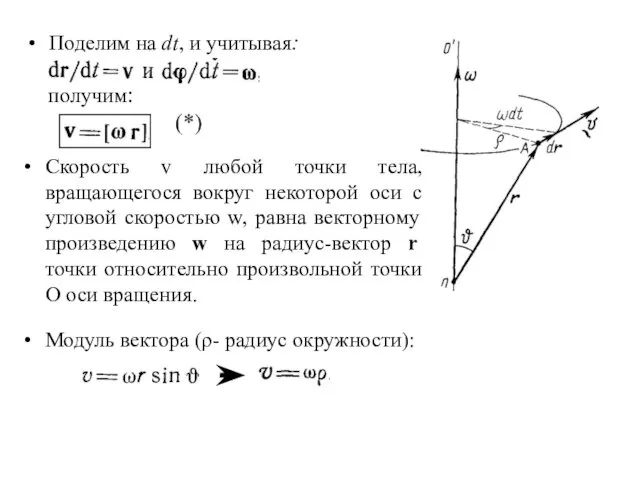
Поделим на dt, и учитывая:
получим:
(*)
Скорость v любой точки тела,
Поделим на dt, и учитывая:
получим:
(*)
Скорость v любой точки тела,
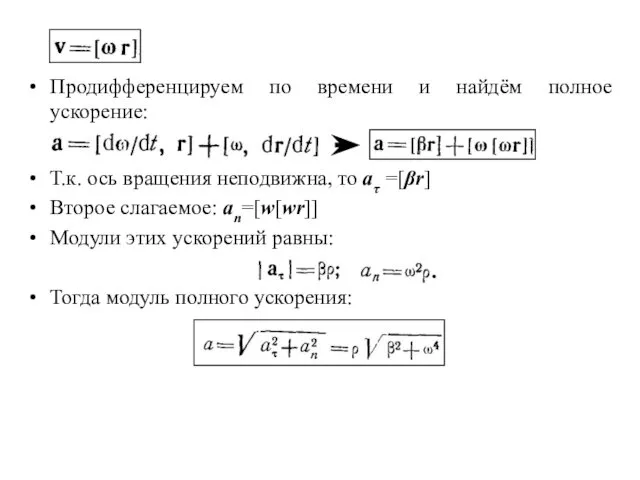
Продифференцируем по времени и найдём полное ускорение:
Т.к. ось вращения неподвижна,
Продифференцируем по времени и найдём полное ускорение:
Т.к. ось вращения неподвижна,
Инерциальные системы отсчёта
Динамика- изучает законы движения тел. В различных системах отсчёта
Инерциальные системы отсчёта
Динамика- изучает законы движения тел. В различных системах отсчёта
Первый закон Ньютона – закон инерции: скорость любого тела остаётся постоянной,
Первый закон Ньютона – закон инерции: скорость любого тела остаётся постоянной,
Предположение о существование хотя бы одной ИСО в пространстве приводит к
Предположение о существование хотя бы одной ИСО в пространстве приводит к
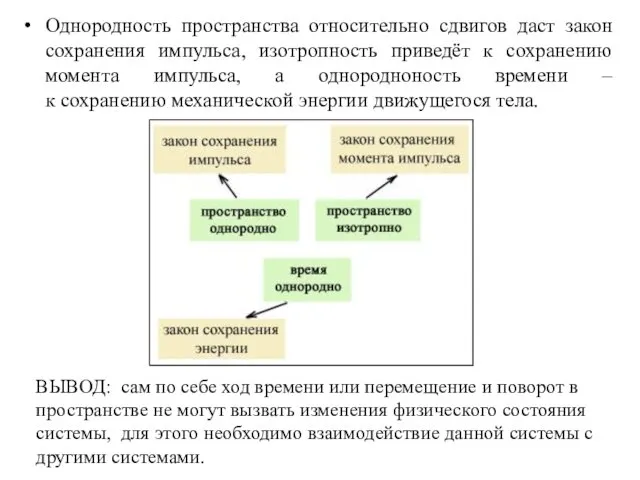
Однородность пространства относительно сдвигов даст закон сохранения импульса, изотропность приведёт к
Однородность пространства относительно сдвигов даст закон сохранения импульса, изотропность приведёт к
Пример однородности пространства, измерим период колебаний маятника, полученный результат обозначим как
Пример однородности пространства, измерим период колебаний маятника, полученный результат обозначим как
Для количественной характеристики и оценки направления воздействия, оказываемого на данное тело
Для количественной характеристики и оценки направления воздействия, оказываемого на данное тело
Из опыта: всякое тело «оказывает сопротивление» при любых попытках изменить
Из опыта: всякое тело «оказывает сопротивление» при любых попытках изменить
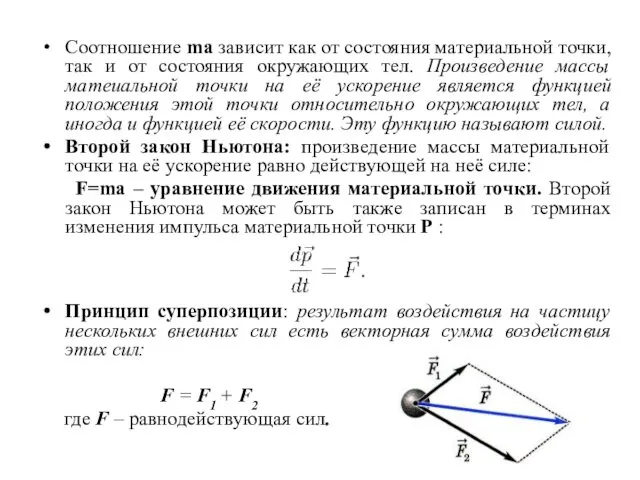
Соотношение ma зависит как от состояния материальной точки, так и от
Соотношение ma зависит как от состояния материальной точки, так и от
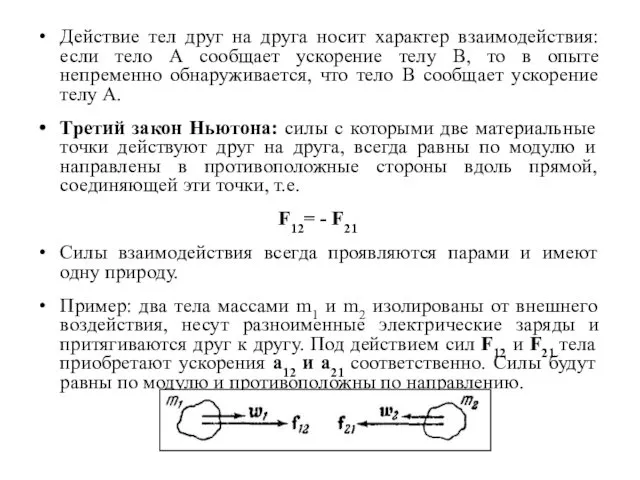
Действие тел друг на друга носит характер взаимодействия: если тело А
Действие тел друг на друга носит характер взаимодействия: если тело А
 Проектная деятельность как составная часть современного образования
Проектная деятельность как составная часть современного образования Источники права
Источники права Современные строительные технологии
Современные строительные технологии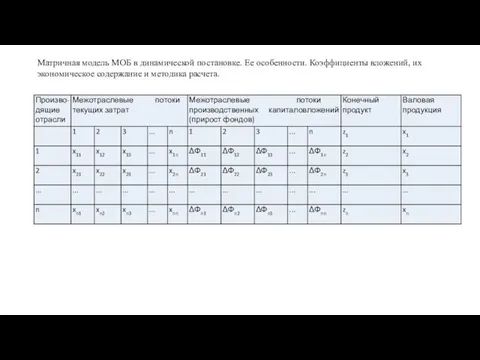 Матричная модель МОБ в динамической постановке
Матричная модель МОБ в динамической постановке Христианство. Основные направления христианства – сравнительная характеристика
Христианство. Основные направления христианства – сравнительная характеристика Любимые игрушки. Лепка из пластилина
Любимые игрушки. Лепка из пластилина Реконструкция электрооборудования многоквартирного жилого дома
Реконструкция электрооборудования многоквартирного жилого дома Системы электронного документооборота
Системы электронного документооборота Наблюдение за состоянием пациентов и интенсивная терапия, во время анестезии
Наблюдение за состоянием пациентов и интенсивная терапия, во время анестезии Оперативная память
Оперативная память Блокада Ленинграда Диск
Блокада Ленинграда Диск Нефтегазоность Севернего Устюрта
Нефтегазоность Севернего Устюрта Формирование комфортной городской среды
Формирование комфортной городской среды Комплексная безопасность информационных систем. Асимметричные алгоритмы шифрования. (Лекция 8)
Комплексная безопасность информационных систем. Асимметричные алгоритмы шифрования. (Лекция 8) Food
Food История дорожного движения
История дорожного движения Презентация балет Щелкунчик П.И.Чайковский
Презентация балет Щелкунчик П.И.Чайковский презентация к занятию В гости к зайке
презентация к занятию В гости к зайке Дягилев
Дягилев Презентация MsPP Дни воинской славы России, часть 2
Презентация MsPP Дни воинской славы России, часть 2 Категорія числа іменників
Категорія числа іменників Космический КВН (презентация)
Космический КВН (презентация) Циркуляция вектора напряженности вихревого электрического поля
Циркуляция вектора напряженности вихревого электрического поля По следам рудознатцев
По следам рудознатцев КЛАССНЫЙ ЧАС
КЛАССНЫЙ ЧАС Zarządzanie procesami
Zarządzanie procesami Рибні консерви і ікра риб
Рибні консерви і ікра риб Австро-Венгрия в XIX - начале XX века
Австро-Венгрия в XIX - начале XX века