- Lehrveranstaltung Antriebstechnik. Worum geht es in der Antriebstechnik ?

Содержание
- 2. Antriebsstrang eines antriebstechnischen Systems Antriebs-maschine(n) Arbeits-maschine(n) Antriebs-kennungen Arbeits-kennungen Kennungswandler Kupplungen Getriebe Drehzahl- und Drehmomentwandlungen Steuerungen/Regelungen Umgebung
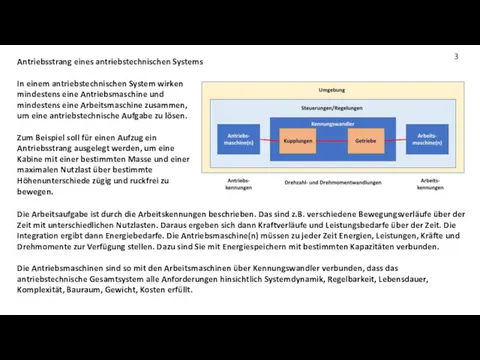
- 3. Antriebsstrang eines antriebstechnischen Systems In einem antriebstechnischen System wirken mindestens eine Antriebsmaschine und mindestens eine Arbeitsmaschine
- 4. Antriebsstrang eines antriebstechnischen Systems Dabei befindet sich das antriebstechnische System in einer Umgebung, die weitere Randbedingungen
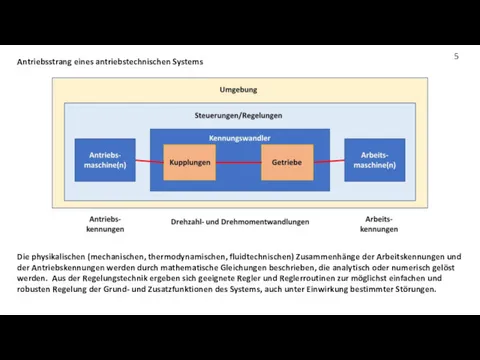
- 5. Antriebsstrang eines antriebstechnischen Systems Die physikalischen (mechanischen, thermodynamischen, fluidtechnischen) Zusammenhänge der Arbeitskennungen und der Antriebskennungen werden
- 6. Lehrveranstaltung Antriebstechnik Anfahren und Beschleunigen eines Antriebsstrangs in einen Betriebspunkt Version: 2020_04_16
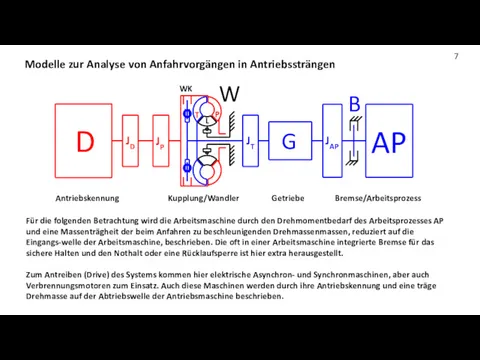
- 7. Modelle zur Analyse von Anfahrvorgängen in Antriebssträngen Für die folgenden Betrachtung wird die Arbeitsmaschine durch den
- 8. Modelle zur Analyse von Anfahrvorgängen in Antriebssträngen Die Kennungen der Antriebsmaschine und die Arbeitsmaschine sind über
- 9. Modelle zur Analyse von Anfahrvorgängen in Antriebssträngen Es gibt natürlich auch Antriebsstränge, die keine(n) geregelte(n) Kupplung(Wandler)
- 10. Arbeitsmaschine und Arbeitsprozess Beim Antrieb eines Fahrzeugs ist dieser Drehmomentbedarf über den Steigungswiderstand, den Rollwiderstand und
- 11. Zur Analyse des Anfahrvorgangs wird hier die Arbeitsmaschine durch ihren Drehmomentenbedarf für den Arbeits-prozess während des
- 12. Arbeitsmaschine und Arbeitsprozess In einigen beispielhaften Analysen werden hier zwei Arbeitsmaschinenprozesse behandelt. Ein 1. Prozess ist
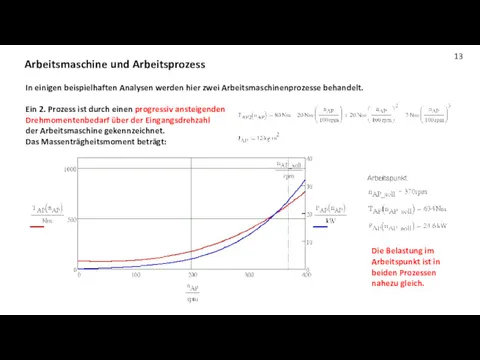
- 13. Arbeitsmaschine und Arbeitsprozess In einigen beispielhaften Analysen werden hier zwei Arbeitsmaschinenprozesse behandelt. Ein 2. Prozess ist
- 14. Antriebsmaschine: Elektromotor Bei sind u.a. der grundlegende Aufbau, die physikalischen Zusammenhänge für die Drehmomentbildung, die Steuerung
- 15. Antriebsmaschine: Elektromotor Bei sind u.a. der grundlegende Aufbau, die physikalischen Zusammenhänge für die Drehmomentbildung, die Steuerung
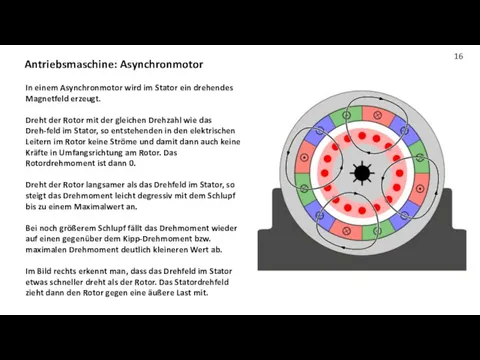
- 16. Antriebsmaschine: Asynchronmotor In einem Asynchronmotor wird im Stator ein drehendes Magnetfeld erzeugt. Dreht der Rotor mit
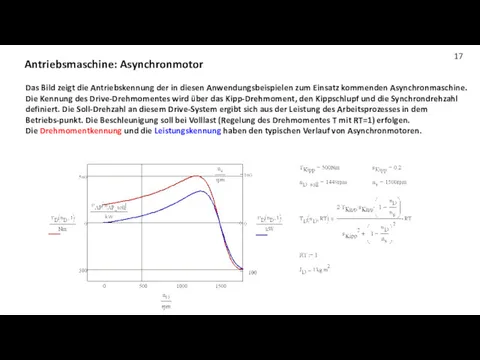
- 17. Antriebsmaschine: Asynchronmotor Das Bild zeigt die Antriebskennung der in diesen Anwendungsbeispielen zum Einsatz kommenden Asynchronmaschine. Die
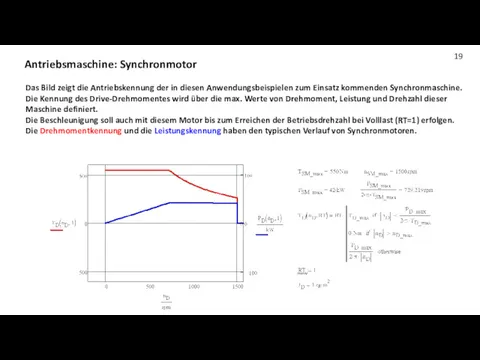
- 18. Antriebsmaschine: Synchronmotor Auch in einem Synchronmotor wird im Stator ein drehendes Magnetfeld erzeugt. Der Rotor selbst
- 19. Antriebsmaschine: Synchronmotor Das Bild zeigt die Antriebskennung der in diesen Anwendungsbeispielen zum Einsatz kommenden Synchronmaschine. Die
- 20. Antriebsmaschine: Synchronmotor Das Bild zeigt die Antriebskennung der in diesen Anwendungsbeispielen zum Einsatz kommenden Synchronmaschine. Die
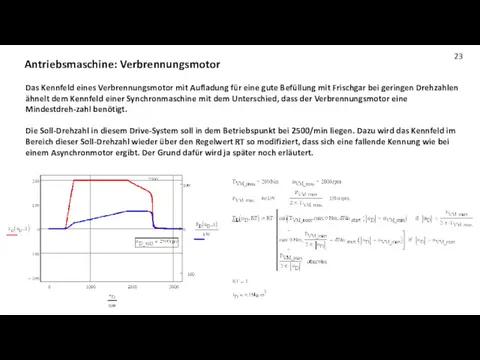
- 21. Antriebsmaschine: Verbrennungsmotor Ein Verbrennungsmotor in der Bauart eines Hubkolbenmotors wandelt die in einem chemischen Kraftstoff-Luftgemisch enthaltene
- 22. Antriebsmaschine: Verbrennungsmotor Das Kennfeld eines Verbrennungsmotor mit Aufladung für eine gute Befüllung mit Frischgas bei geringen
- 23. Antriebsmaschine: Verbrennungsmotor Das Kennfeld eines Verbrennungsmotor mit Aufladung für eine gute Befüllung mit Frischgar bei geringen
- 24. Kopplung von Drive-Kennkennung und Arbeits-Kennung nur über ein Getriebe mit konstanter Übersetzung Aus der Betriebsdrehzahl der
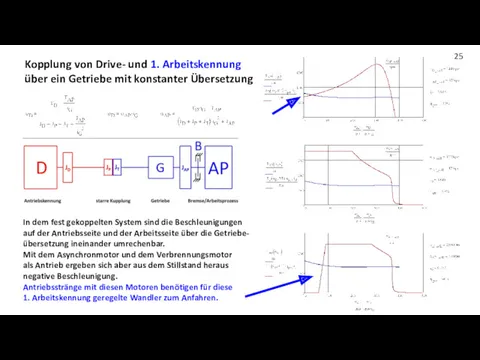
- 25. Kopplung von Drive- und 1. Arbeitskennung über ein Getriebe mit konstanter Übersetzung In dem fest gekoppelten
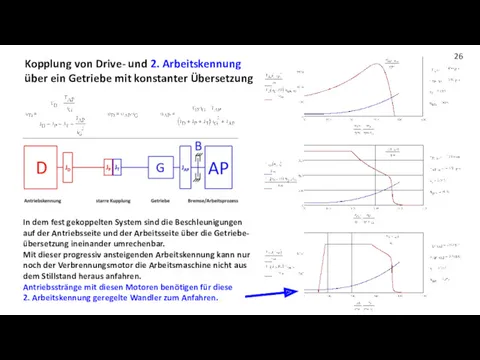
- 26. Kopplung von Drive- und 2. Arbeitskennung über ein Getriebe mit konstanter Übersetzung In dem fest gekoppelten
- 27. Kopplung von Drive-Kennkennung und Arbeits-Kennung über eine(n) geregelte Kupplung(Wandler) und ein Getriebe mit konstanter Übersetzung Die
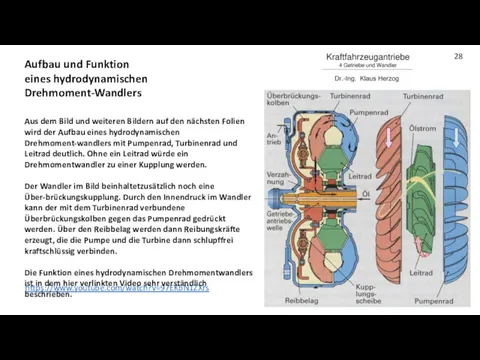
- 28. Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers https://www.youtube.com/watch?v=97EKbN1ZXrs Aus dem Bild und weiteren Bildern auf den nächsten
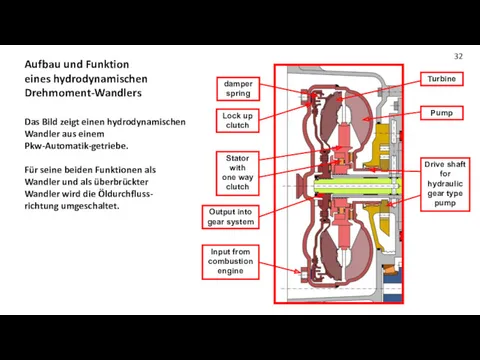
- 29. Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers Dieses Bild zeigt einen hydrodynamischen Wandler mit einer Pumpe 1
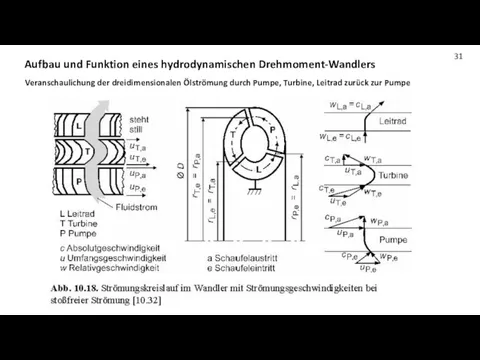
- 30. Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers Veranschaulichung der dreidimensionalen Ölströmung durch Pumpe, Turbine, Leitrad zurück zur
- 31. Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers Veranschaulichung der dreidimensionalen Ölströmung durch Pumpe, Turbine, Leitrad zurück zur
- 32. Pump Turbine Lock up clutch Stator with one way clutch Drive shaft for hydraulic gear type
- 33. big oil flow through lock up clutch oil feed into torque converter if lock up clutch
- 34. oil feed into torque converter if lock up clutch shall be closed oil pressure of about
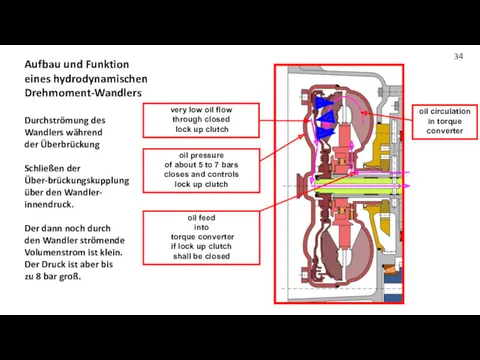
- 35. Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers Die Strömungsverhältnisse in einem Wandler verändern sich stark mit dem
- 36. Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers Die Strömungsverhältnisse in einem Wandler verändern sich stark mit dem
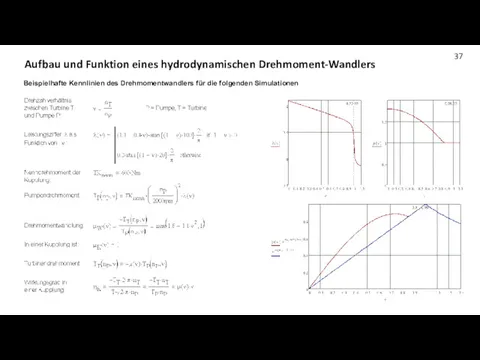
- 37. Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers Beispielhafte Kennlinien des Drehmomentwandlers für die folgenden Simulationen
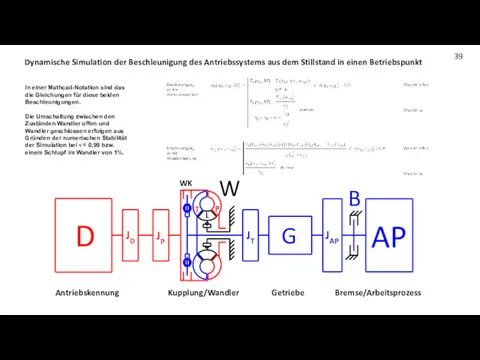
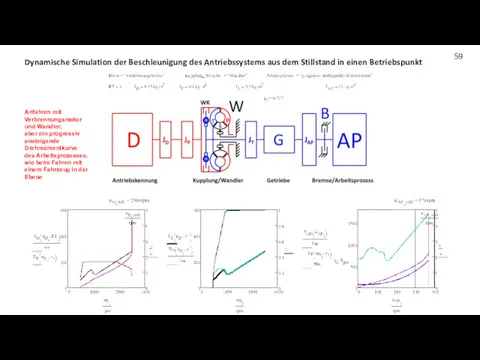
- 38. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Die Drehmomente in dem
- 39. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt In einer Mathcad-Notation sind
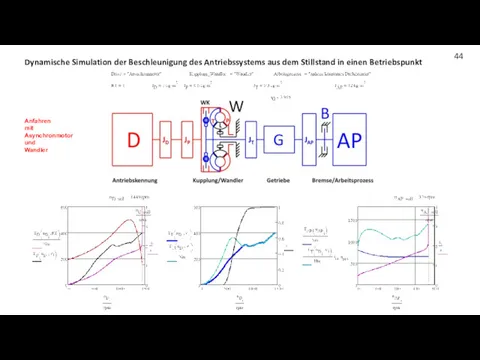
- 40. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Anfahren mit Asynchronmotor und
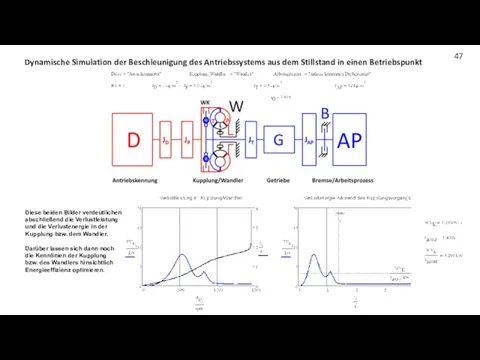
- 41. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Auf der Antriebsseite ist
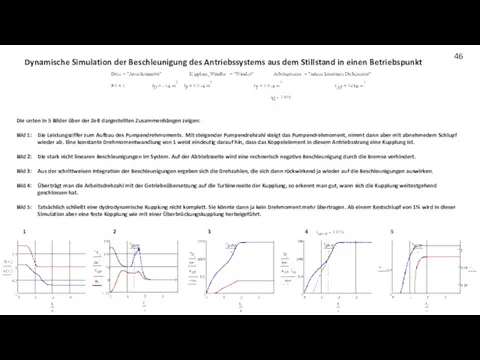
- 42. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Die unten in 5
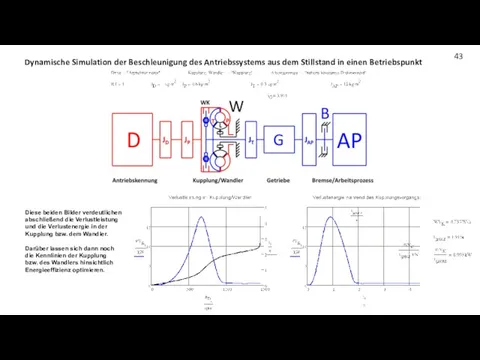
- 43. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Diese beiden Bilder verdeutlichen
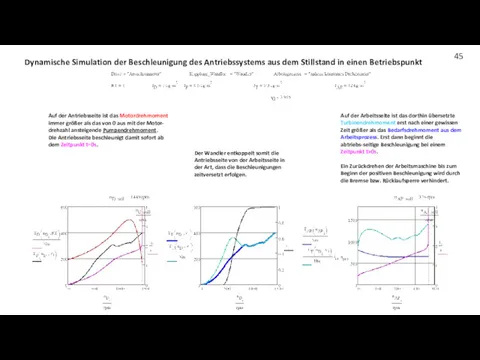
- 44. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Anfahren mit Asynchronmotor und
- 45. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Auf der Antriebsseite ist
- 46. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Die unten in 5
- 47. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Diese beiden Bilder verdeutlichen
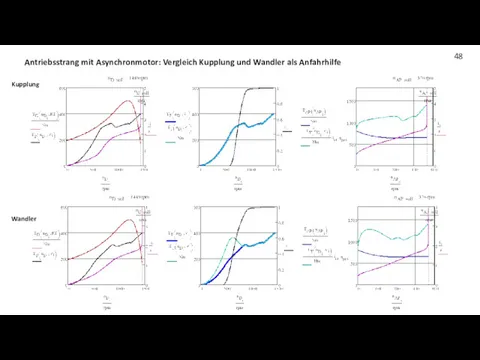
- 48. Antriebsstrang mit Asynchronmotor: Vergleich Kupplung und Wandler als Anfahrhilfe Kupplung Wandler
- 49. 1 2 3 4 5 Antriebsstrang mit Asynchronmotor: Vergleich Kupplung und Wandler als Anfahrhilfe Kupplung Wandler
- 50. Antriebsstrang mit Asynchronmotor: Vergleich Kupplung und Wandler als Anfahrhilfe Beim Anfahren mit einem Drehmomentwandler beschleunigen bei
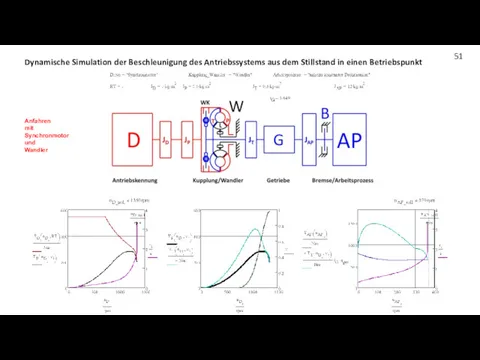
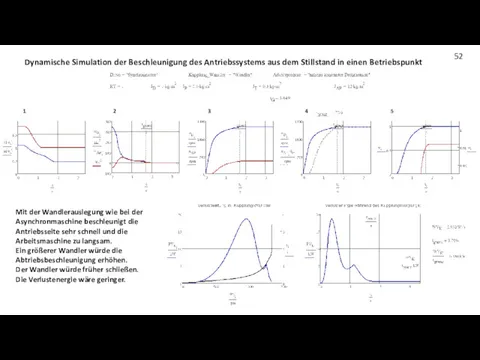
- 51. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Anfahren mit Synchronmotor und
- 52. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt 1 2 3 4
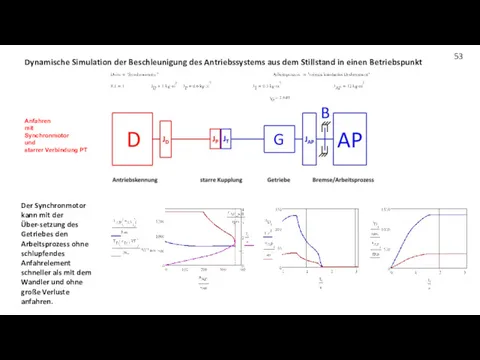
- 53. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Anfahren mit Synchronmotor und
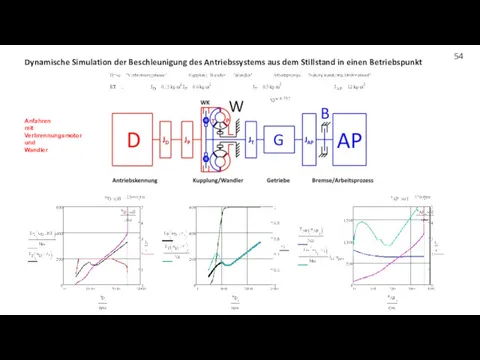
- 54. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Anfahren mit Verbrennungsmotor und
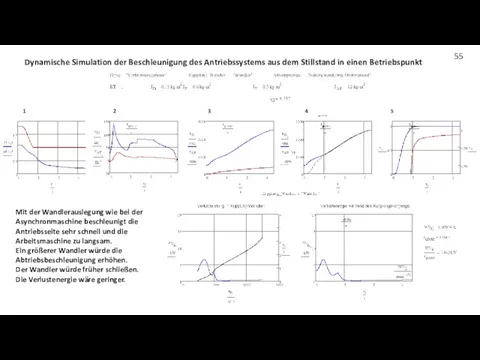
- 55. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt 1 2 3 4
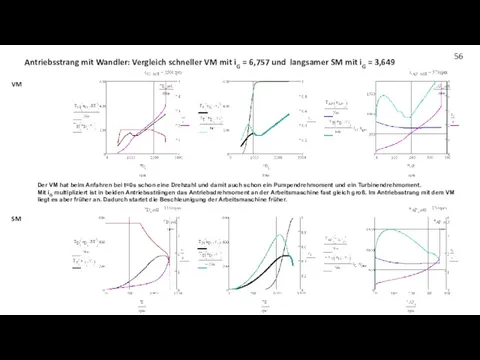
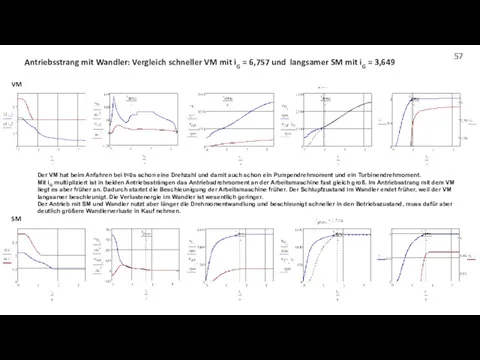
- 56. Antriebsstrang mit Wandler: Vergleich schneller VM mit iG = 6,757 und langsamer SM mit iG =
- 57. Antriebsstrang mit Wandler: Vergleich schneller VM mit iG = 6,757 und langsamer SM mit iG =
- 58. Antriebsstrang mit Wandler: Vergleich schneller VM mit iG = 6,757 und langsamer SM mit iG =
- 59. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Anfahren mit Verbrennungsmotor und
- 60. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt 1 2 3 4
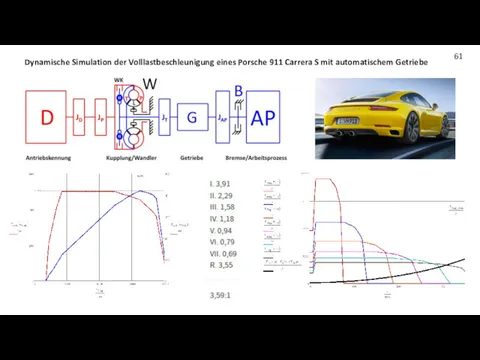
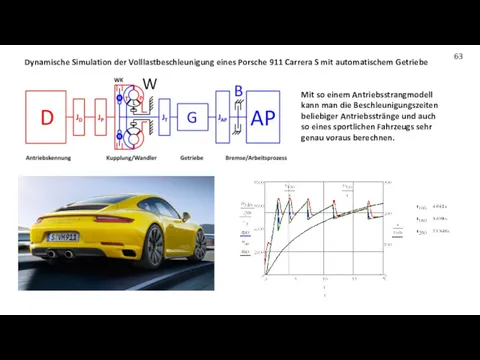
- 61. Dynamische Simulation der Volllastbeschleunigung eines Porsche 911 Carrera S mit automatischem Getriebe
- 62. Dynamische Simulation der Volllastbeschleunigung eines Porsche 911 Carrera S mit automatischem Getriebe Kennung des Verbrennungsmotors Baujahr
- 63. Dynamische Simulation der Volllastbeschleunigung eines Porsche 911 Carrera S mit automatischem Getriebe Mit so einem Antriebsstrangmodell
- 64. Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen Betriebspunkt Die Drehmomente in dem
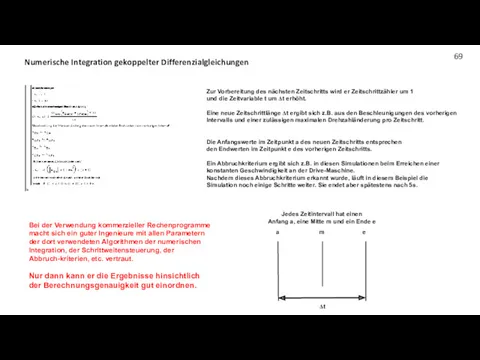
- 65. Numerische Integration gekoppelter Differenzialgleichungen Alle oben dargestellten Simulationen wurden mit dem folgenden Algorithmus einer numerischen Integration
- 66. Numerische Integration gekoppelter Differenzialgleichungen Die Simulation startet bei t=0s. Die erste Schrittweite für den erste Zeitschritt
- 67. Numerische Integration gekoppelter Differenzialgleichungen Mit den Beschleunigungen im Zeitpunkt a werden die Drehzahlen im Zeitpunkt m
- 68. Numerische Integration gekoppelter Differenzialgleichungen Nun lässt sich eine mittlere Beschleunigung im Zeitfenster a bis e nach
- 69. Numerische Integration gekoppelter Differenzialgleichungen Zur Vorbereitung des nächsten Zeitschritts wird er Zeitschrittzähler um 1 und die
- 71. Скачать презентацию
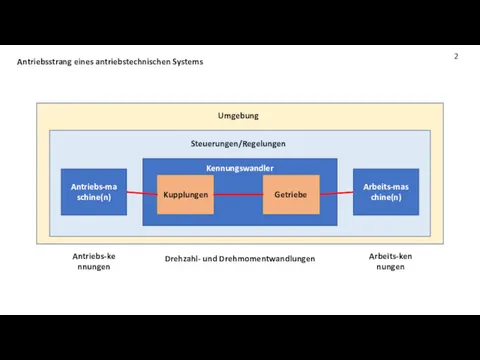
Antriebsstrang eines antriebstechnischen Systems
Antriebs-maschine(n)
Arbeits-maschine(n)
Antriebs-kennungen
Arbeits-kennungen
Kennungswandler
Kupplungen
Getriebe
Drehzahl- und Drehmomentwandlungen
Steuerungen/Regelungen
Umgebung
Antriebsstrang eines antriebstechnischen Systems
Antriebs-maschine(n)
Arbeits-maschine(n)
Antriebs-kennungen
Arbeits-kennungen
Kennungswandler
Kupplungen
Getriebe
Drehzahl- und Drehmomentwandlungen
Steuerungen/Regelungen
Umgebung
Antriebsstrang eines antriebstechnischen Systems
In einem antriebstechnischen System wirken mindestens eine Antriebsmaschine
Antriebsstrang eines antriebstechnischen Systems
In einem antriebstechnischen System wirken mindestens eine Antriebsmaschine

Antriebsstrang eines antriebstechnischen Systems
Dabei befindet sich das antriebstechnische System in einer
Antriebsstrang eines antriebstechnischen Systems
Dabei befindet sich das antriebstechnische System in einer
Antriebsstrang eines antriebstechnischen Systems
Die physikalischen (mechanischen, thermodynamischen, fluidtechnischen) Zusammenhänge der Arbeitskennungen
Antriebsstrang eines antriebstechnischen Systems
Die physikalischen (mechanischen, thermodynamischen, fluidtechnischen) Zusammenhänge der Arbeitskennungen

Lehrveranstaltung
Antriebstechnik
Anfahren und Beschleunigen
eines Antriebsstrangs
in einen Betriebspunkt
Version: 2020_04_16
Lehrveranstaltung
Antriebstechnik
Anfahren und Beschleunigen
eines Antriebsstrangs
in einen Betriebspunkt
Version: 2020_04_16
Modelle zur Analyse von Anfahrvorgängen in Antriebssträngen
Für die folgenden Betrachtung wird
Modelle zur Analyse von Anfahrvorgängen in Antriebssträngen
Für die folgenden Betrachtung wird

Modelle zur Analyse von Anfahrvorgängen in Antriebssträngen
Die Kennungen der Antriebsmaschine und
Modelle zur Analyse von Anfahrvorgängen in Antriebssträngen
Die Kennungen der Antriebsmaschine und

Modelle zur Analyse von Anfahrvorgängen in Antriebssträngen
Es gibt natürlich auch Antriebsstränge,
Modelle zur Analyse von Anfahrvorgängen in Antriebssträngen
Es gibt natürlich auch Antriebsstränge,

Arbeitsmaschine und Arbeitsprozess
Beim Antrieb eines Fahrzeugs ist dieser Drehmomentbedarf über den
Arbeitsmaschine und Arbeitsprozess
Beim Antrieb eines Fahrzeugs ist dieser Drehmomentbedarf über den

Zur Analyse des Anfahrvorgangs wird hier die Arbeitsmaschine durch ihren Drehmomentenbedarf
Zur Analyse des Anfahrvorgangs wird hier die Arbeitsmaschine durch ihren Drehmomentenbedarf

Arbeitsmaschine und Arbeitsprozess
In einigen beispielhaften Analysen werden hier zwei Arbeitsmaschinenprozesse behandelt.
Ein
Arbeitsmaschine und Arbeitsprozess
In einigen beispielhaften Analysen werden hier zwei Arbeitsmaschinenprozesse behandelt.
Ein
Arbeitsmaschine und Arbeitsprozess
In einigen beispielhaften Analysen werden hier zwei Arbeitsmaschinenprozesse behandelt.
Ein
Arbeitsmaschine und Arbeitsprozess
In einigen beispielhaften Analysen werden hier zwei Arbeitsmaschinenprozesse behandelt.
Ein
Antriebsmaschine: Elektromotor
Bei sind u.a.
der grundlegende Aufbau,
die physikalischen Zusammenhänge für
Antriebsmaschine: Elektromotor
Bei sind u.a.
der grundlegende Aufbau,
die physikalischen Zusammenhänge für

Antriebsmaschine: Elektromotor
Bei sind u.a.
der grundlegende Aufbau,
die physikalischen Zusammenhänge für
Antriebsmaschine: Elektromotor
Bei sind u.a.
der grundlegende Aufbau,
die physikalischen Zusammenhänge für
Antriebsmaschine: Asynchronmotor
In einem Asynchronmotor wird im Stator ein drehendes Magnetfeld erzeugt.
Dreht
Antriebsmaschine: Asynchronmotor
In einem Asynchronmotor wird im Stator ein drehendes Magnetfeld erzeugt.
Dreht
Antriebsmaschine: Asynchronmotor
Das Bild zeigt die Antriebskennung der in diesen Anwendungsbeispielen zum
Antriebsmaschine: Asynchronmotor
Das Bild zeigt die Antriebskennung der in diesen Anwendungsbeispielen zum

Antriebsmaschine: Synchronmotor
Auch in einem Synchronmotor wird im Stator ein drehendes Magnetfeld
Antriebsmaschine: Synchronmotor
Auch in einem Synchronmotor wird im Stator ein drehendes Magnetfeld
Antriebsmaschine: Synchronmotor
Das Bild zeigt die Antriebskennung der in diesen Anwendungsbeispielen zum
Antriebsmaschine: Synchronmotor
Das Bild zeigt die Antriebskennung der in diesen Anwendungsbeispielen zum

Antriebsmaschine: Synchronmotor
Das Bild zeigt die Antriebskennung der in diesen Anwendungsbeispielen zum
Antriebsmaschine: Synchronmotor
Das Bild zeigt die Antriebskennung der in diesen Anwendungsbeispielen zum

Antriebsmaschine: Verbrennungsmotor
Ein Verbrennungsmotor in der Bauart eines Hubkolbenmotors wandelt die in
Antriebsmaschine: Verbrennungsmotor
Ein Verbrennungsmotor in der Bauart eines Hubkolbenmotors wandelt die in

Antriebsmaschine: Verbrennungsmotor
Das Kennfeld eines Verbrennungsmotor mit Aufladung für eine gute Befüllung
Antriebsmaschine: Verbrennungsmotor
Das Kennfeld eines Verbrennungsmotor mit Aufladung für eine gute Befüllung
Antriebsmaschine: Verbrennungsmotor
Das Kennfeld eines Verbrennungsmotor mit Aufladung für eine gute Befüllung
Antriebsmaschine: Verbrennungsmotor
Das Kennfeld eines Verbrennungsmotor mit Aufladung für eine gute Befüllung

Kopplung von Drive-Kennkennung und Arbeits-Kennung nur über ein Getriebe mit konstanter
Kopplung von Drive-Kennkennung und Arbeits-Kennung nur über ein Getriebe mit konstanter
Kopplung von Drive- und 1. Arbeitskennung über ein Getriebe mit konstanter
Kopplung von Drive- und 1. Arbeitskennung über ein Getriebe mit konstanter
Kopplung von Drive- und 2. Arbeitskennung über ein Getriebe mit konstanter
Kopplung von Drive- und 2. Arbeitskennung über ein Getriebe mit konstanter
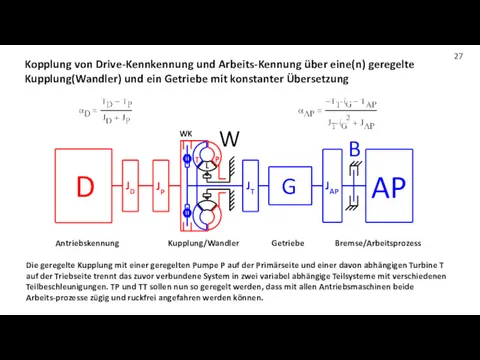
Kopplung von Drive-Kennkennung und Arbeits-Kennung über eine(n) geregelte Kupplung(Wandler) und ein
Kopplung von Drive-Kennkennung und Arbeits-Kennung über eine(n) geregelte Kupplung(Wandler) und ein
Aufbau und Funktion
eines hydrodynamischen
Drehmoment-Wandlers
https://www.youtube.com/watch?v=97EKbN1ZXrs
Aus dem Bild und weiteren Bildern
Aufbau und Funktion
eines hydrodynamischen
Drehmoment-Wandlers
https://www.youtube.com/watch?v=97EKbN1ZXrs
Aus dem Bild und weiteren Bildern

Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Dieses Bild zeigt einen hydrodynamischen Wandler
Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Dieses Bild zeigt einen hydrodynamischen Wandler

Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Veranschaulichung der dreidimensionalen Ölströmung durch Pumpe,
Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Veranschaulichung der dreidimensionalen Ölströmung durch Pumpe,
Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Veranschaulichung der dreidimensionalen Ölströmung durch Pumpe,
Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Veranschaulichung der dreidimensionalen Ölströmung durch Pumpe,
Pump
Turbine
Lock up clutch
Stator with
one way clutch
Drive shaft for hydraulic gear
Pump
Turbine
Lock up clutch
Stator with
one way clutch
Drive shaft for hydraulic gear
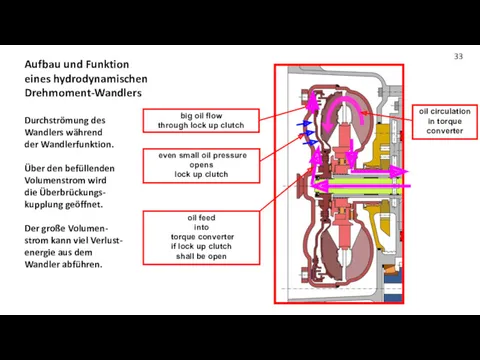
big oil flow
through lock up clutch
oil feed
into
torque converter
if lock
big oil flow
through lock up clutch
oil feed
into
torque converter
if lock
oil feed
into
torque converter
if lock up clutch
shall be closed
oil
oil feed
into
torque converter
if lock up clutch
shall be closed
oil

Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Die Strömungsverhältnisse in einem Wandler verändern
Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Die Strömungsverhältnisse in einem Wandler verändern
Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Die Strömungsverhältnisse in einem Wandler verändern
Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Die Strömungsverhältnisse in einem Wandler verändern
Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Beispielhafte Kennlinien des Drehmomentwandlers für die
Aufbau und Funktion eines hydrodynamischen Drehmoment-Wandlers
Beispielhafte Kennlinien des Drehmomentwandlers für die

Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen

Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen

Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen

Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Antriebsstrang mit Asynchronmotor: Vergleich Kupplung und Wandler als Anfahrhilfe
Kupplung
Wandler
Antriebsstrang mit Asynchronmotor: Vergleich Kupplung und Wandler als Anfahrhilfe
Kupplung
Wandler

1 2 3 4 5
Antriebsstrang mit Asynchronmotor: Vergleich Kupplung und Wandler
1 2 3 4 5
Antriebsstrang mit Asynchronmotor: Vergleich Kupplung und Wandler

Antriebsstrang mit Asynchronmotor: Vergleich Kupplung und Wandler als Anfahrhilfe
Beim Anfahren mit
Antriebsstrang mit Asynchronmotor: Vergleich Kupplung und Wandler als Anfahrhilfe
Beim Anfahren mit
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Antriebsstrang mit Wandler: Vergleich schneller VM mit iG = 6,757 und
Antriebsstrang mit Wandler: Vergleich schneller VM mit iG = 6,757 und
Antriebsstrang mit Wandler: Vergleich schneller VM mit iG = 6,757 und
Antriebsstrang mit Wandler: Vergleich schneller VM mit iG = 6,757 und

Antriebsstrang mit Wandler: Vergleich schneller VM mit iG = 6,757 und
Antriebsstrang mit Wandler: Vergleich schneller VM mit iG = 6,757 und
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen

Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Volllastbeschleunigung eines Porsche 911 Carrera S mit automatischem
Dynamische Simulation der Volllastbeschleunigung eines Porsche 911 Carrera S mit automatischem

Dynamische Simulation der Volllastbeschleunigung eines Porsche 911 Carrera S mit automatischem
Dynamische Simulation der Volllastbeschleunigung eines Porsche 911 Carrera S mit automatischem
Dynamische Simulation der Volllastbeschleunigung eines Porsche 911 Carrera S mit automatischem
Dynamische Simulation der Volllastbeschleunigung eines Porsche 911 Carrera S mit automatischem

Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen
Dynamische Simulation der Beschleunigung des Antriebssystems aus dem Stillstand in einen

Numerische Integration gekoppelter Differenzialgleichungen
Alle oben dargestellten Simulationen wurden mit dem folgenden
Numerische Integration gekoppelter Differenzialgleichungen
Alle oben dargestellten Simulationen wurden mit dem folgenden

Numerische Integration gekoppelter Differenzialgleichungen
Die Simulation startet bei t=0s.
Die erste Schrittweite für
Numerische Integration gekoppelter Differenzialgleichungen
Die Simulation startet bei t=0s.
Die erste Schrittweite für

Numerische Integration gekoppelter Differenzialgleichungen
Mit den Beschleunigungen im Zeitpunkt a werden die
Numerische Integration gekoppelter Differenzialgleichungen
Mit den Beschleunigungen im Zeitpunkt a werden die

Numerische Integration gekoppelter Differenzialgleichungen
Nun lässt sich eine mittlere Beschleunigung im Zeitfenster
Numerische Integration gekoppelter Differenzialgleichungen
Nun lässt sich eine mittlere Beschleunigung im Zeitfenster
Numerische Integration gekoppelter Differenzialgleichungen
Zur Vorbereitung des nächsten Zeitschritts wird er Zeitschrittzähler
Numerische Integration gekoppelter Differenzialgleichungen
Zur Vorbereitung des nächsten Zeitschritts wird er Zeitschrittzähler
 Среднее арифметическое. Среднее значение величины
Среднее арифметическое. Среднее значение величины Теория управления
Теория управления Задание №9 ОГЭ. Обобщенный план варианта КИМ 2016 года для ГИА выпускников IХ классов по информатике и ИКТ
Задание №9 ОГЭ. Обобщенный план варианта КИМ 2016 года для ГИА выпускников IХ классов по информатике и ИКТ Пасха
Пасха Способы поверхностного упрочнения прокатных валков
Способы поверхностного упрочнения прокатных валков Номенклатура органических соединений
Номенклатура органических соединений Розробка інтегрованої автоматизованої системи управління виготовленням спирту з використанням хмарного середовища
Розробка інтегрованої автоматизованої системи управління виготовленням спирту з використанням хмарного середовища Проект Музей мяча. История, разновидности мяча, игры с мячом
Проект Музей мяча. История, разновидности мяча, игры с мячом Адаптивная физическая культура. Общие положения
Адаптивная физическая культура. Общие положения Чрезвычайные ситуации природного характера
Чрезвычайные ситуации природного характера Как запустить мейлинг с нулевым бюджетом
Как запустить мейлинг с нулевым бюджетом Открытое акционерное общество Холдинговая компания Якутуголь
Открытое акционерное общество Холдинговая компания Якутуголь Елді мекендердің су желісін төсеу
Елді мекендердің су желісін төсеу Презентация Музей истории села МОУ Лобанихинская СОШ
Презентация Музей истории села МОУ Лобанихинская СОШ Неопределенная форма глагола - инфинитив
Неопределенная форма глагола - инфинитив презентация педагогического проекта Учимся жить вместе
презентация педагогического проекта Учимся жить вместе Цифровой образовательный ресурс Социальное развитие детей дошкольного возраста (тест для педагогов дошкольных образовательных учреждений)
Цифровой образовательный ресурс Социальное развитие детей дошкольного возраста (тест для педагогов дошкольных образовательных учреждений) Сигнатурное комбо устройство MiVue™ i85
Сигнатурное комбо устройство MiVue™ i85 Судебная система в Российской Федерации
Судебная система в Российской Федерации Типы рыночных структур
Типы рыночных структур Ввод и редактирование текста
Ввод и редактирование текста Развитие познавательной активности у обучающихся средствами ИКТ в рамках ФГОС (на примере уроков географии)
Развитие познавательной активности у обучающихся средствами ИКТ в рамках ФГОС (на примере уроков географии) Цветы в нашей жизни. Диск
Цветы в нашей жизни. Диск Творческий проект Бисероплетение
Творческий проект Бисероплетение Добровольное медицинское страхование сотрудников ООО РДВ-СОФТ
Добровольное медицинское страхование сотрудников ООО РДВ-СОФТ Физминутка на движение Веселая зарядка
Физминутка на движение Веселая зарядка дифференциация гласных а я
дифференциация гласных а я Классный час .Тема 23 февраля - день защитника Отечества 1Б класс с творческими работами
Классный час .Тема 23 февраля - день защитника Отечества 1Б класс с творческими работами