- Лекция_4_Моделирование_соединений

Содержание
- 2. План лекции Контакт Настройки контакта Контактные результаты Точечная сварка Соединение сетки Worksheet соединений Пример 4.1 –
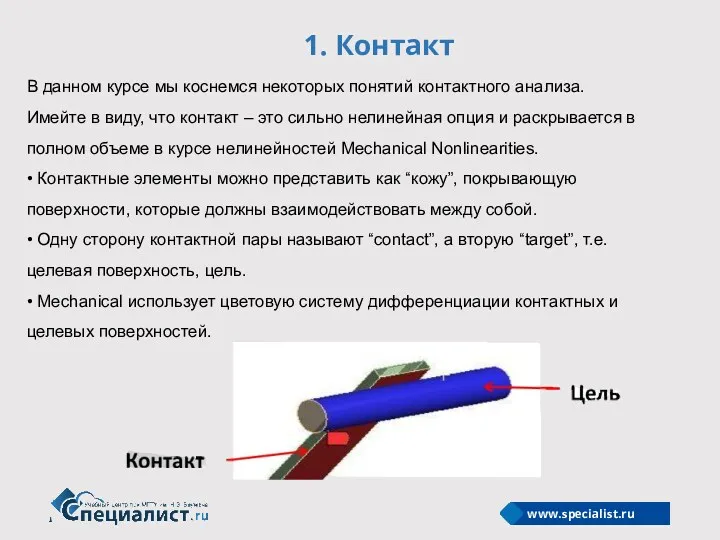
- 3. 1. Контакт В данном курсе мы коснемся некоторых понятий контактного анализа. Имейте в виду, что контакт
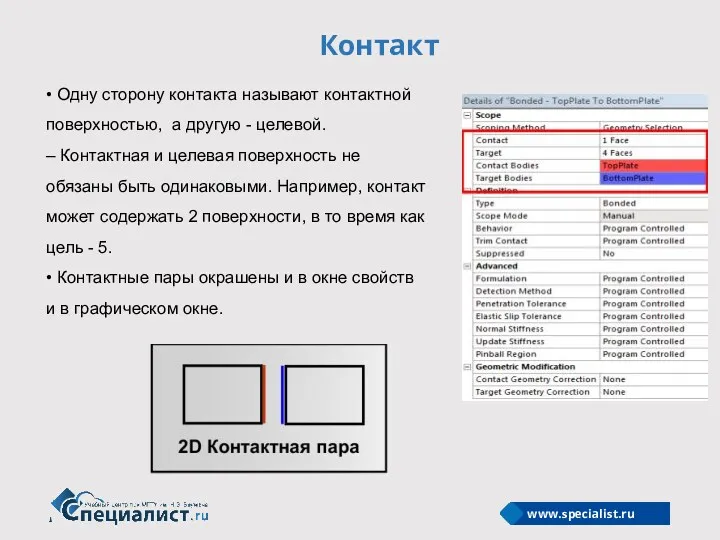
- 4. Контакт • Одну сторону контакта называют контактной поверхностью, а другую - целевой. – Контактная и целевая
- 5. Контакт При импорте сборки области контактов между деталями создаются автоматически. • Контакты содержатся в ветви «Connections»
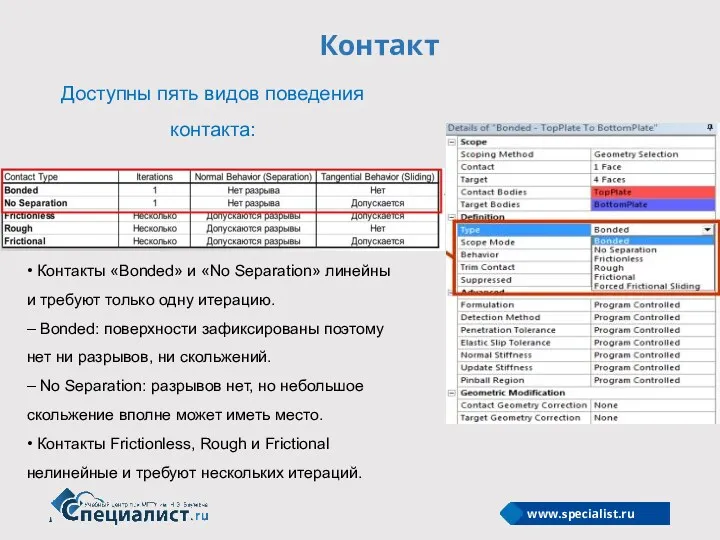
- 6. Контакт Доступны пять видов поведения контакта: • Контакты «Bonded» и «No Separation» линейны и требуют только
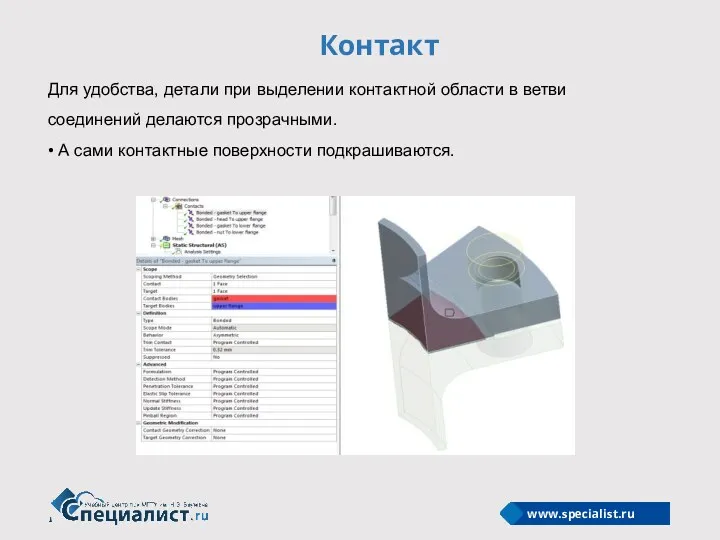
- 7. Контакт Для удобства, детали при выделении контактной области в ветви соединений делаются прозрачными. • А сами
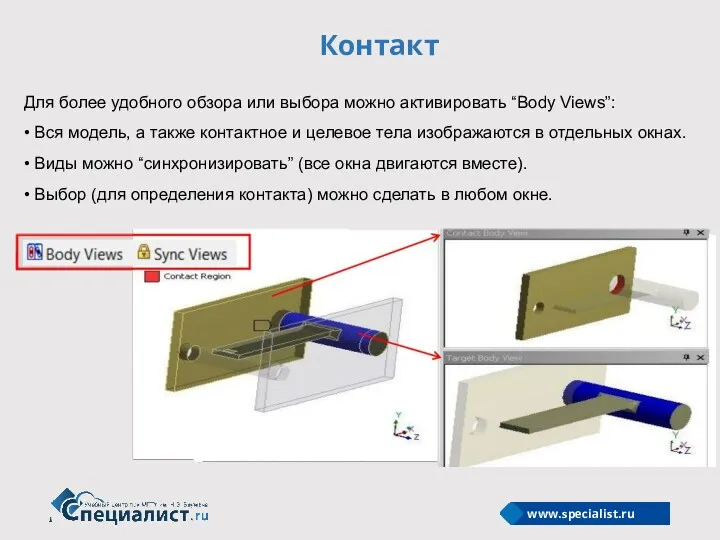
- 8. Контакт Для более удобного обзора или выбора можно активировать “Body Views”: • Вся модель, а также
- 9. Контакт Для удобства отображения можно также «взорвать» (explode) модель сборки • Разделение деталей осуществляется с помощью
- 10. Контакт Для улучшения читаемости моделей, есть фильтры по имени и уникальные цвета для изображения множества нагрузок,
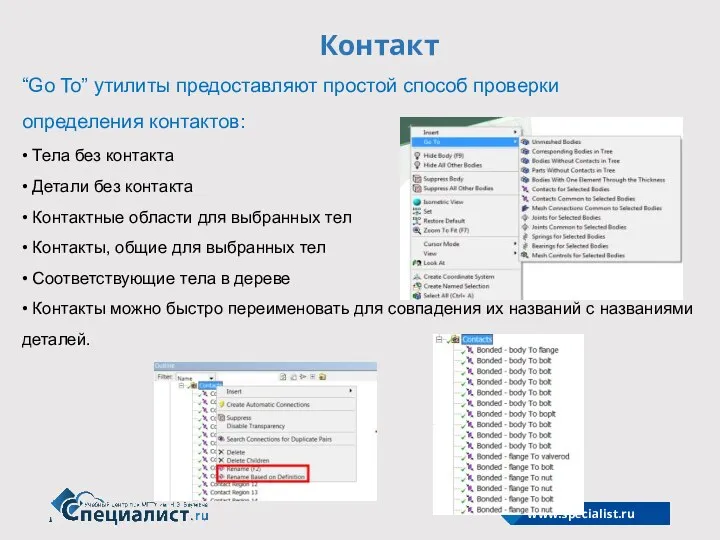
- 11. Контакт “Go To” утилиты предоставляют простой способ проверки определения контактов: • Тела без контакта • Детали
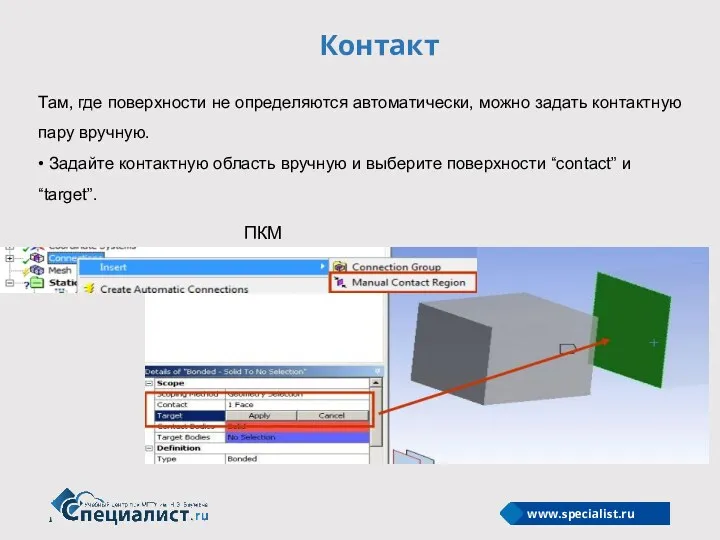
- 12. Контакт Там, где поверхности не определяются автоматически, можно задать контактную пару вручную. • Задайте контактную область
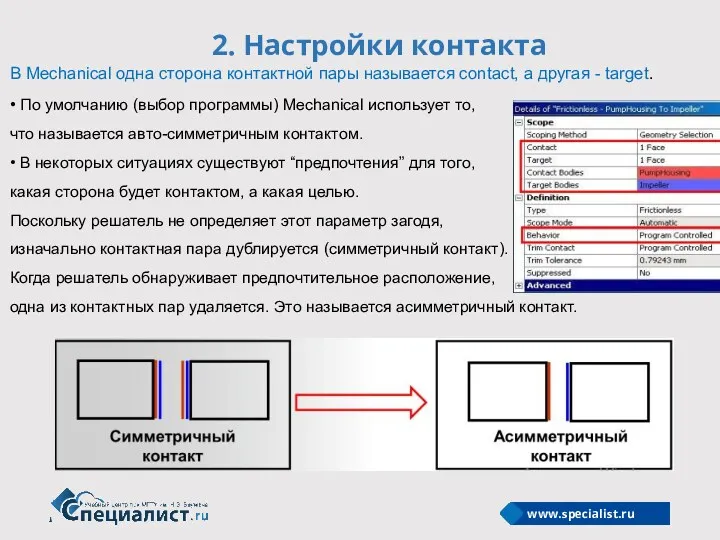
- 13. 2. Настройки контакта В Mechanical одна сторона контактной пары называется contact, а другая - target. •
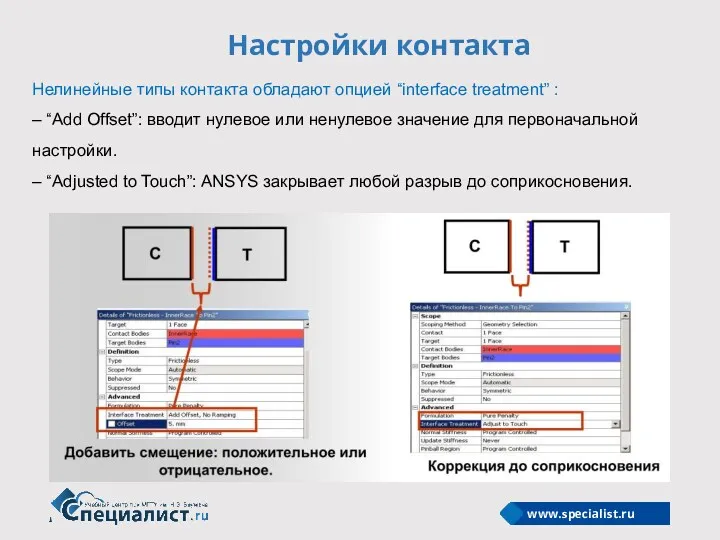
- 14. Настройки контакта Нелинейные типы контакта обладают опцией “interface treatment” : – “Add Offset”: вводит нулевое или
- 15. Настройки контакта Пример настройки поверхностей - моделирование прессовой посадки: Геометрическая модель содержит штифт в отверстии того
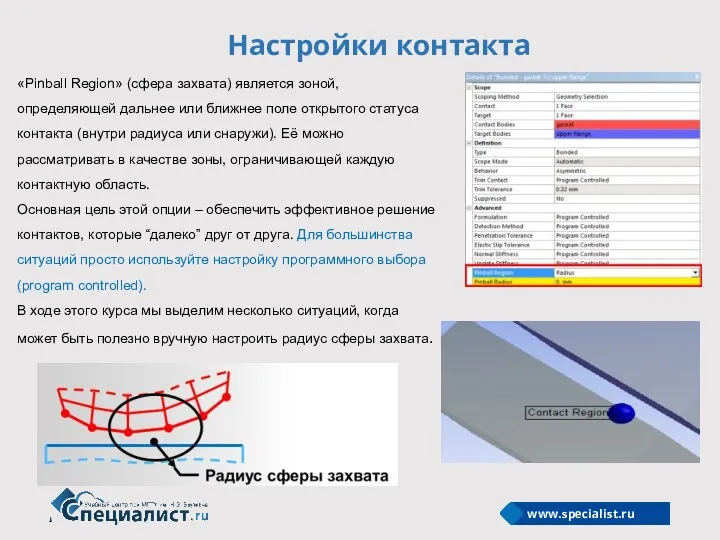
- 16. Настройки контакта «Pinball Region» (сфера захвата) является зоной, определяющей дальнее или ближнее поле открытого статуса контакта
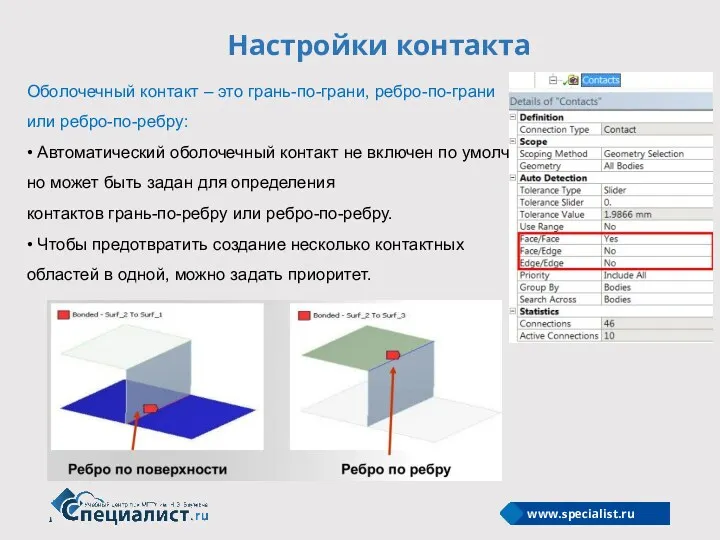
- 17. Настройки контакта Оболочечный контакт – это грань-по-грани, ребро-по-грани или ребро-по-ребру: • Автоматический оболочечный контакт не включен
- 18. Настройки контакта При использовании контактов необходимо разобраться с несколькими уникальными аспектами геометрии поверхностей:
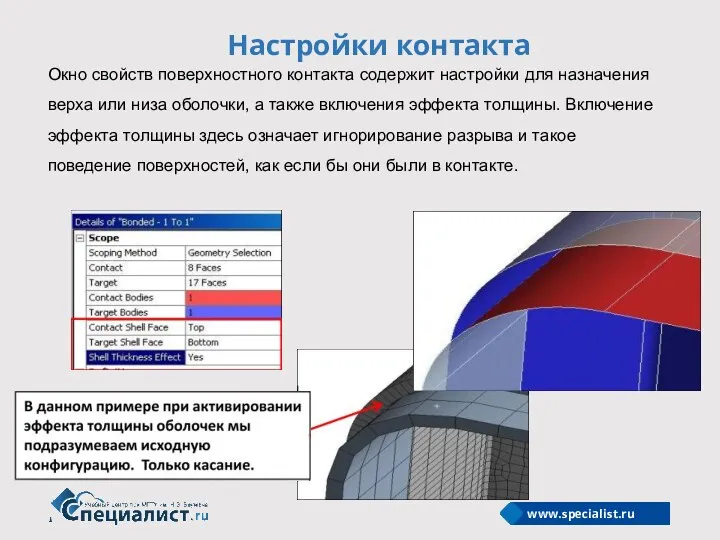
- 19. Настройки контакта Окно свойств поверхностного контакта содержит настройки для назначения верха или низа оболочки, а также
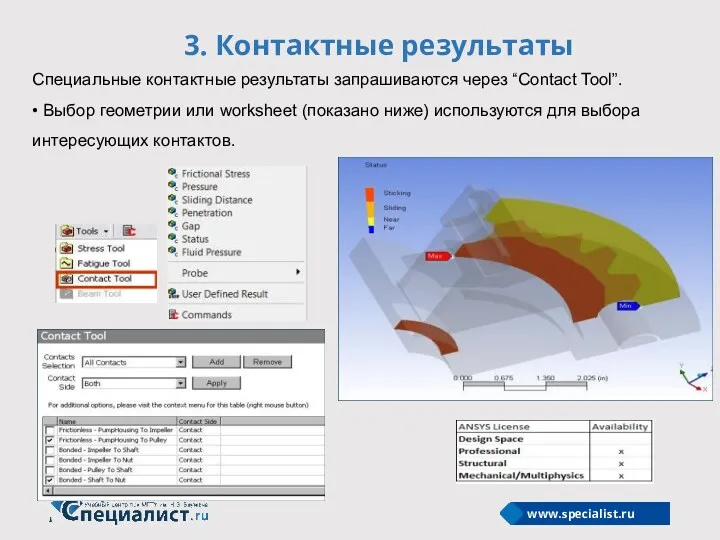
- 20. 3. Контактные результаты Специальные контактные результаты запрашиваются через “Contact Tool”. • Выбор геометрии или worksheet (показано
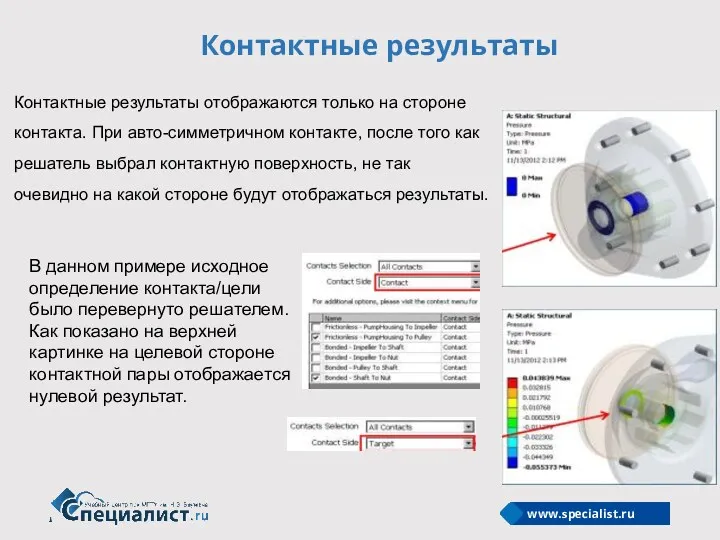
- 21. Контактные результаты Контактные результаты отображаются только на стороне контакта. При авто-симметричном контакте, после того как решатель
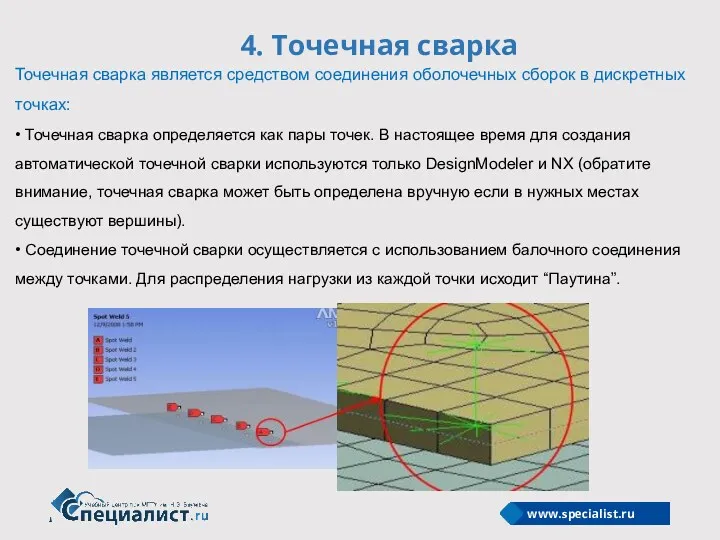
- 22. 4. Точечная сварка Точечная сварка является средством соединения оболочечных сборок в дискретных точках: • Точечная сварка
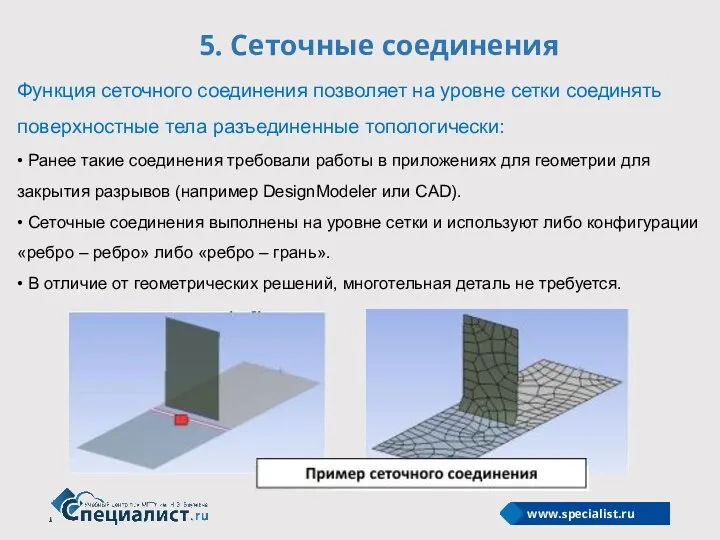
- 23. 5. Сеточные соединения Функция сеточного соединения позволяет на уровне сетки соединять поверхностные тела разъединенные топологически: •
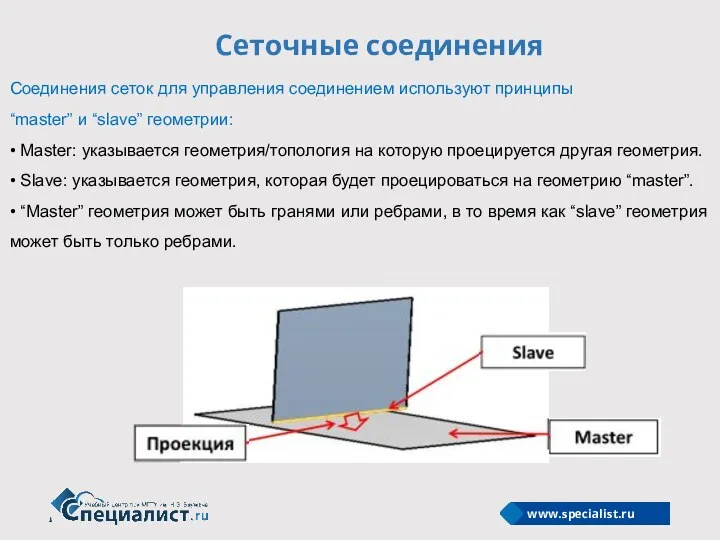
- 24. Сеточные соединения Соединения сеток для управления соединением используют принципы “master” и “slave” геометрии: • Master: указывается
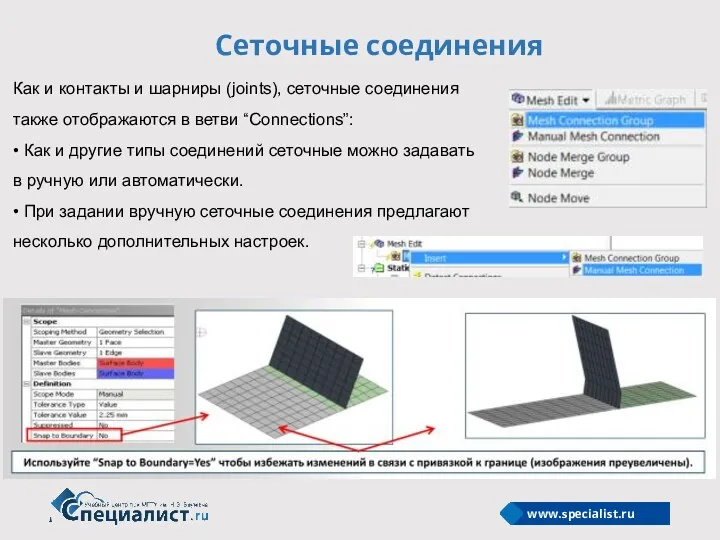
- 25. Сеточные соединения Как и контакты и шарниры (joints), сеточные соединения также отображаются в ветви “Connections”: •
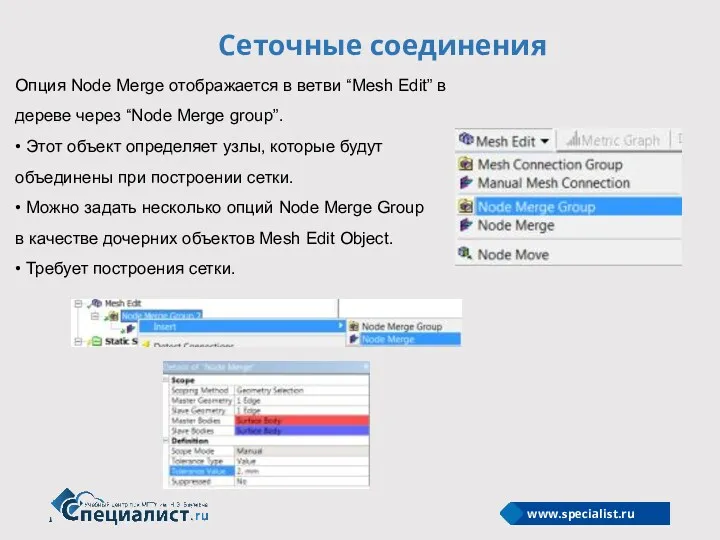
- 26. Сеточные соединения Опция Node Merge отображается в ветви “Mesh Edit” в дереве через “Node Merge group”.
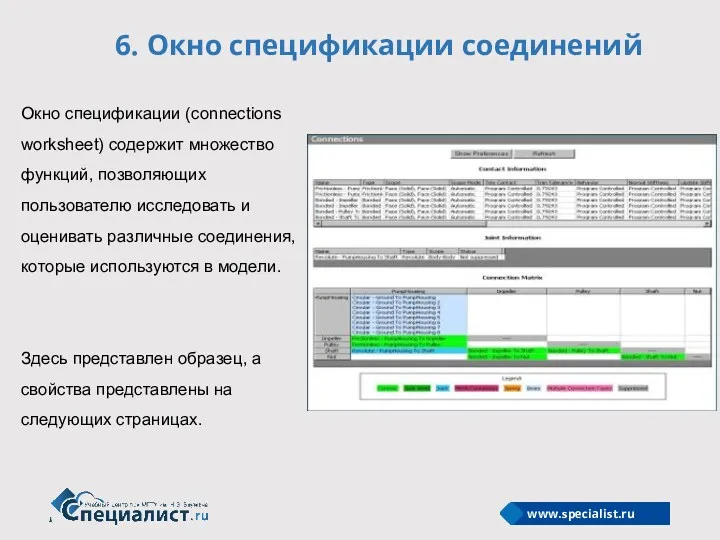
- 27. 6. Окно спецификации соединений Окно спецификации (connections worksheet) содержит множество функций, позволяющих пользователю исследовать и оценивать
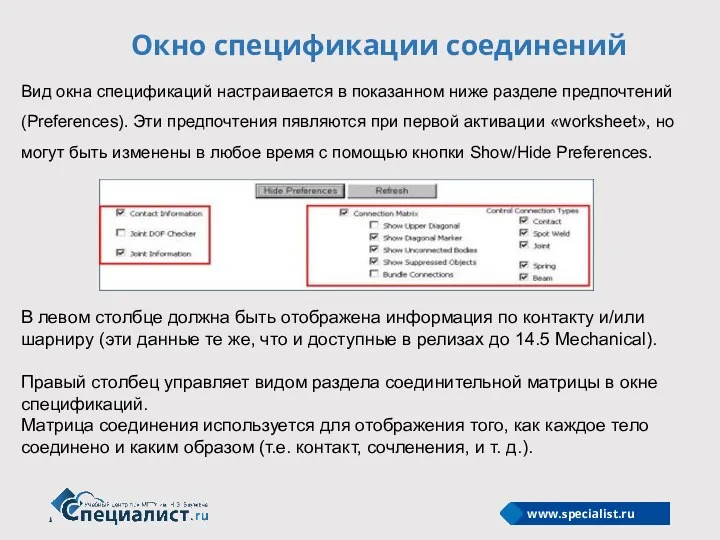
- 28. Окно спецификации соединений Вид окна спецификаций настраивается в показанном ниже разделе предпочтений (Preferences). Эти предпочтения пявляются
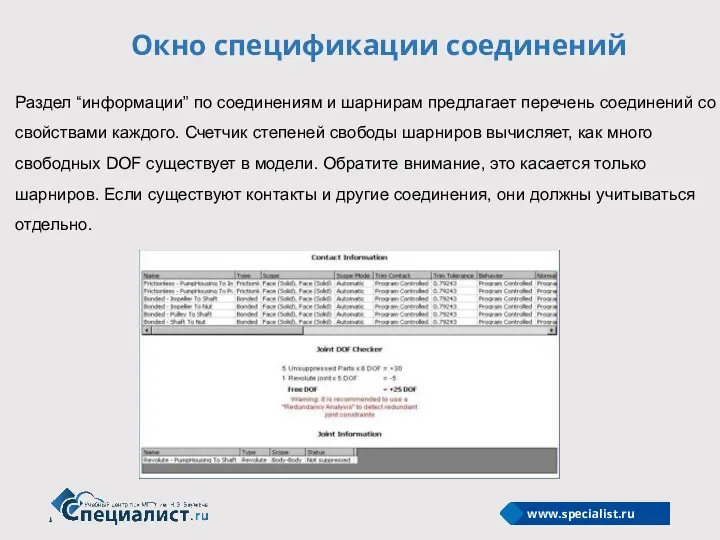
- 29. Окно спецификации соединений Раздел “информации” по соединениям и шарнирам предлагает перечень соединений со свойствами каждого. Счетчик
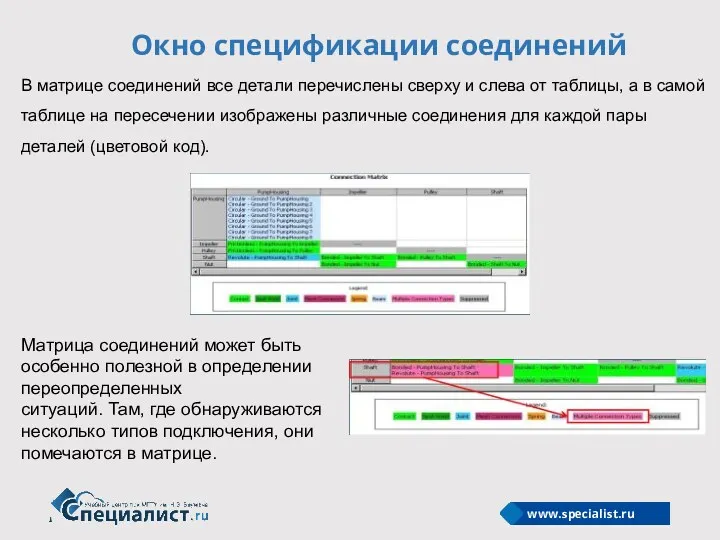
- 30. Окно спецификации соединений В матрице соединений все детали перечислены сверху и слева от таблицы, а в
- 31. 7. Пример 4.1 – Настройка контакта
- 32. 8. Определение шарниров Функция шарниров в Mechanical предлагает альтернативу контакту при моделировании взаимодействия между телами или
- 33. Определение шарниров Пример вращательного шарнира: • Шкала показывает, что “RZ” или поворот вокруг оси Z разрешен.
- 34. 9. Пружины и балки Пружины и балки определяются как шарниры «тело – тело» или «тело –
- 35. Пружины и балки Пружины: • По умолчанию пружины находятся в свободном состоянии (не нагружены). • Пружина
- 36. Пружины и балки Балки: • Создаются балки с круглым сечением. Радиус задается в окне свойств. •
- 37. 10. Пример 4.2 – Использование шарниров
- 38. 11. Приложение • Конфигурация шарниров • Опции Stops и Locks
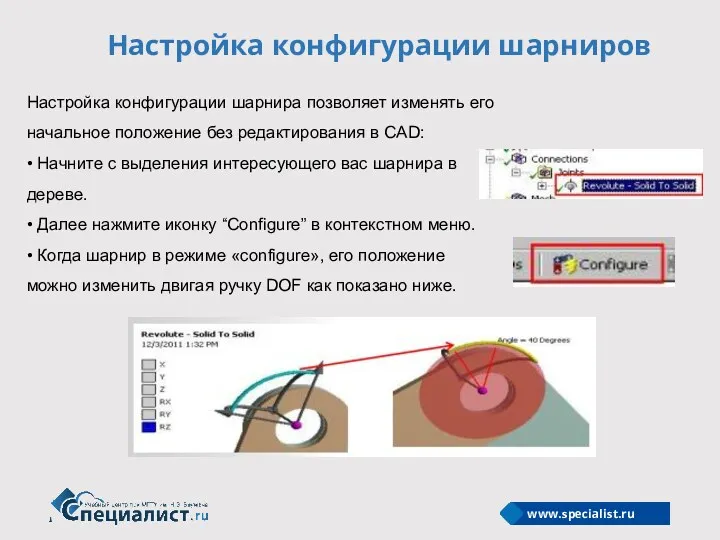
- 39. Настройка конфигурации шарниров Настройка конфигурации шарнира позволяет изменять его начальное положение без редактирования в CAD: •
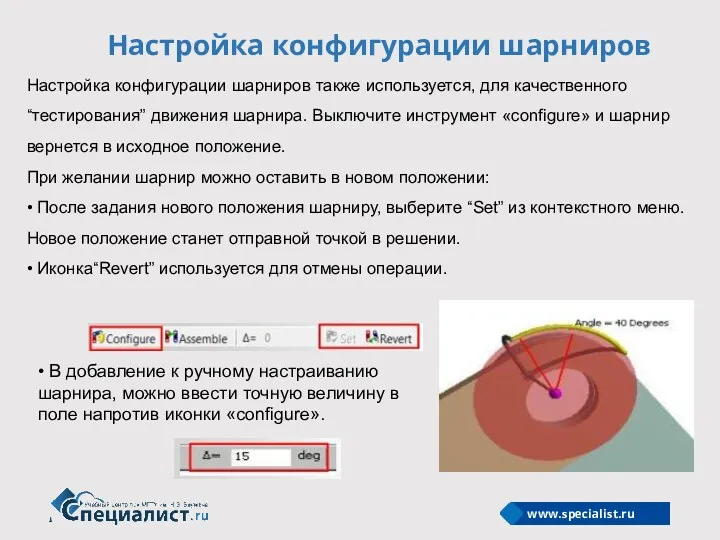
- 40. Настройка конфигурации шарниров Настройка конфигурации шарниров также используется, для качественного “тестирования” движения шарнира. Выключите инструмент «configure»
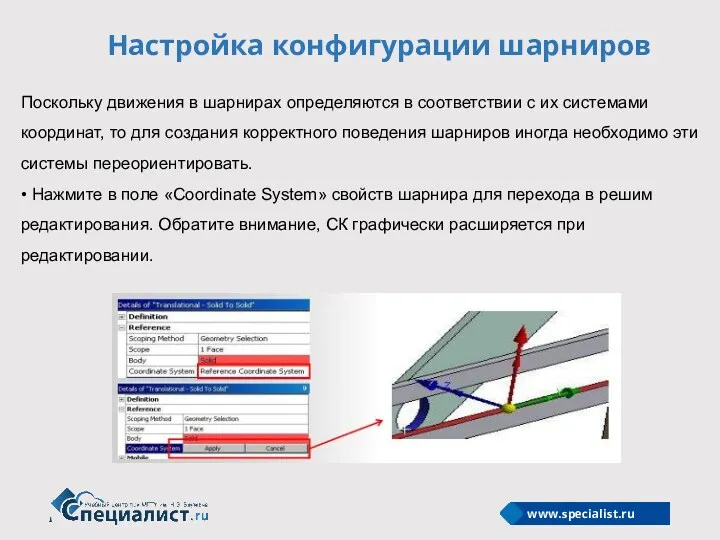
- 41. Настройка конфигурации шарниров Поскольку движения в шарнирах определяются в соответствии с их системами координат, то для
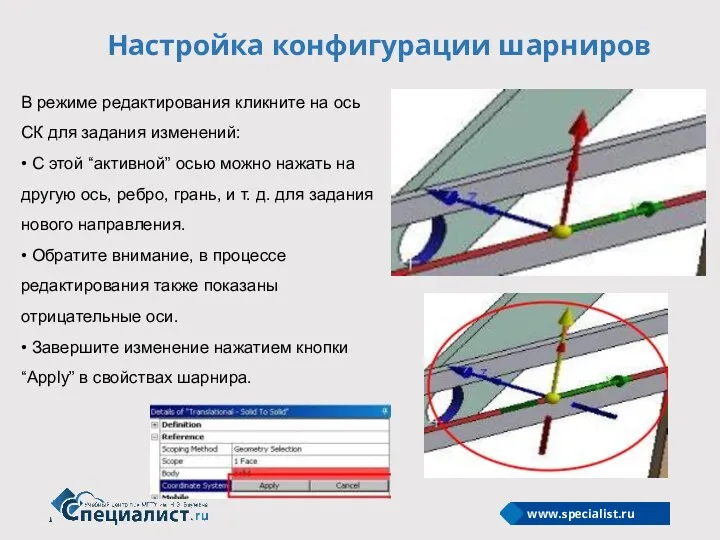
- 42. Настройка конфигурации шарниров В режиме редактирования кликните на ось СК для задания изменений: • С этой
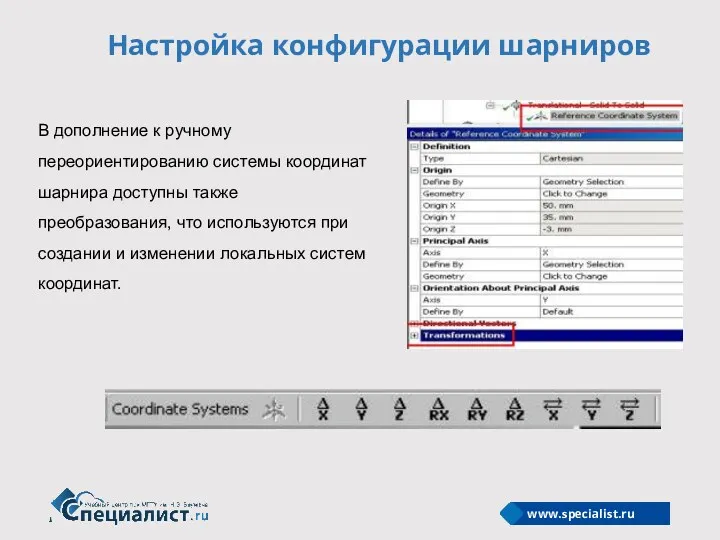
- 43. Настройка конфигурации шарниров В дополнение к ручному переориентированию системы координат шарнира доступны также преобразования, что используются
- 45. Скачать презентацию
План лекции
Контакт
Настройки контакта
Контактные результаты
Точечная сварка
Соединение сетки
Worksheet соединений
Пример 4.1 – Настройки контакта
Определение
План лекции
Контакт
Настройки контакта
Контактные результаты
Точечная сварка
Соединение сетки
Worksheet соединений
Пример 4.1 – Настройки контакта
Определение
1. Контакт
В данном курсе мы коснемся некоторых понятий контактного анализа. Имейте
1. Контакт
В данном курсе мы коснемся некоторых понятий контактного анализа. Имейте
Контакт
• Одну сторону контакта называют контактной поверхностью, а другую - целевой.
–
Контакт
• Одну сторону контакта называют контактной поверхностью, а другую - целевой.
–

Контакт
При импорте сборки области контактов между деталями создаются автоматически.
• Контакты содержатся
Контакт
При импорте сборки области контактов между деталями создаются автоматически.
• Контакты содержатся
Контакт
Доступны пять видов поведения контакта:
• Контакты «Bonded» и «No Separation» линейны
Контакт
Доступны пять видов поведения контакта:
• Контакты «Bonded» и «No Separation» линейны
Контакт
Для удобства, детали при выделении контактной области в ветви соединений делаются
Контакт
Для удобства, детали при выделении контактной области в ветви соединений делаются
Контакт
Для более удобного обзора или выбора можно активировать “Body Views”:
• Вся
Контакт
Для более удобного обзора или выбора можно активировать “Body Views”:
• Вся

Контакт
Для удобства отображения можно также «взорвать» (explode) модель сборки
• Разделение деталей
Контакт
Для удобства отображения можно также «взорвать» (explode) модель сборки
• Разделение деталей

Контакт
Для улучшения читаемости
моделей, есть фильтры по
имени и уникальные цвета
для изображения
множества нагрузок,
граничных
Контакт
Для улучшения читаемости
моделей, есть фильтры по
имени и уникальные цвета
для изображения
множества нагрузок,
граничных
Контакт
“Go To” утилиты предоставляют простой способ проверки
определения контактов:
• Тела без
Контакт
“Go To” утилиты предоставляют простой способ проверки
определения контактов:
• Тела без
Контакт
Там, где поверхности не определяются автоматически, можно задать контактную
пару вручную.
• Задайте
Контакт
Там, где поверхности не определяются автоматически, можно задать контактную
пару вручную.
• Задайте
2. Настройки контакта
В Mechanical одна сторона контактной пары называется contact, а
2. Настройки контакта
В Mechanical одна сторона контактной пары называется contact, а
Настройки контакта
Нелинейные типы контакта обладают опцией “interface treatment” :
– “Add Offset”:
Настройки контакта
Нелинейные типы контакта обладают опцией “interface treatment” :
– “Add Offset”:

Настройки контакта
Пример настройки поверхностей - моделирование прессовой посадки:
Геометрическая модель содержит штифт
Настройки контакта
Пример настройки поверхностей - моделирование прессовой посадки:
Геометрическая модель содержит штифт
Настройки контакта
«Pinball Region» (сфера захвата) является зоной,
определяющей дальнее или ближнее поле
Настройки контакта
«Pinball Region» (сфера захвата) является зоной,
определяющей дальнее или ближнее поле
Настройки контакта
Оболочечный контакт – это грань-по-грани, ребро-по-грани
или ребро-по-ребру:
• Автоматический оболочечный
Настройки контакта
Оболочечный контакт – это грань-по-грани, ребро-по-грани
или ребро-по-ребру:
• Автоматический оболочечный

Настройки контакта
При использовании контактов необходимо разобраться с несколькими уникальными аспектами геометрии
Настройки контакта
При использовании контактов необходимо разобраться с несколькими уникальными аспектами геометрии
Настройки контакта
Окно свойств поверхностного контакта содержит настройки для назначения верха или
Настройки контакта
Окно свойств поверхностного контакта содержит настройки для назначения верха или
3. Контактные результаты
Специальные контактные результаты запрашиваются через “Contact Tool”.
• Выбор геометрии
3. Контактные результаты
Специальные контактные результаты запрашиваются через “Contact Tool”.
• Выбор геометрии
Контактные результаты
Контактные результаты отображаются только на стороне
контакта. При авто-симметричном контакте, после
Контактные результаты
Контактные результаты отображаются только на стороне
контакта. При авто-симметричном контакте, после
4. Точечная сварка
Точечная сварка является средством соединения оболочечных сборок в дискретных
4. Точечная сварка
Точечная сварка является средством соединения оболочечных сборок в дискретных
5. Сеточные соединения
Функция сеточного соединения позволяет на уровне сетки соединять
поверхностные тела
5. Сеточные соединения
Функция сеточного соединения позволяет на уровне сетки соединять
поверхностные тела
Сеточные соединения
Соединения сеток для управления соединением используют принципы
“master” и “slave”
Сеточные соединения
Соединения сеток для управления соединением используют принципы “master” и “slave”
Сеточные соединения
Как и контакты и шарниры (joints), сеточные соединения
также отображаются в
Сеточные соединения
Как и контакты и шарниры (joints), сеточные соединения
также отображаются в
Сеточные соединения
Опция Node Merge отображается в ветви “Mesh Edit” в
дереве
Сеточные соединения
Опция Node Merge отображается в ветви “Mesh Edit” в
дереве
6. Окно спецификации соединений
Окно спецификации (connections
worksheet) содержит множество
функций, позволяющих
пользователю исследовать и
оценивать
6. Окно спецификации соединений
Окно спецификации (connections
worksheet) содержит множество
функций, позволяющих
пользователю исследовать и
оценивать
Окно спецификации соединений
Вид окна спецификаций настраивается в показанном ниже разделе предпочтений
(Preferences).
Окно спецификации соединений
Вид окна спецификаций настраивается в показанном ниже разделе предпочтений
(Preferences).
Окно спецификации соединений
Раздел “информации” по соединениям и шарнирам предлагает перечень соединений
Окно спецификации соединений
Раздел “информации” по соединениям и шарнирам предлагает перечень соединений
Окно спецификации соединений
В матрице соединений все детали перечислены сверху и слева
Окно спецификации соединений
В матрице соединений все детали перечислены сверху и слева

7. Пример 4.1 – Настройка контакта
7. Пример 4.1 – Настройка контакта
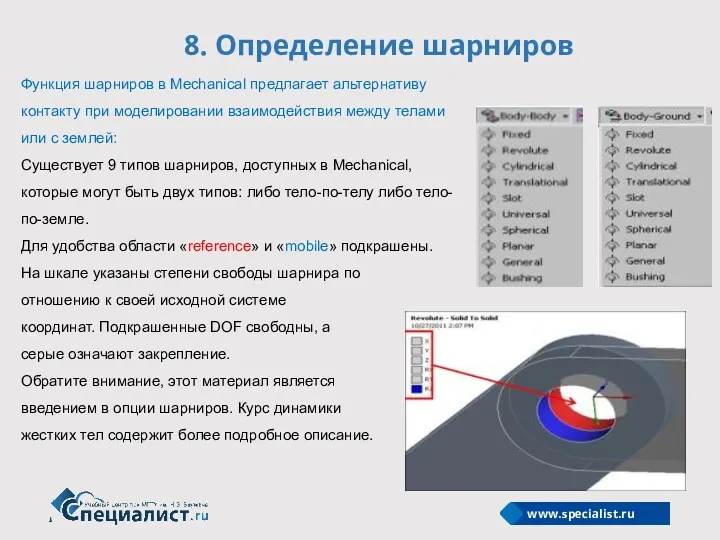
8. Определение шарниров
Функция шарниров в Mechanical предлагает альтернативу
контакту при моделировании взаимодействия
8. Определение шарниров
Функция шарниров в Mechanical предлагает альтернативу
контакту при моделировании взаимодействия
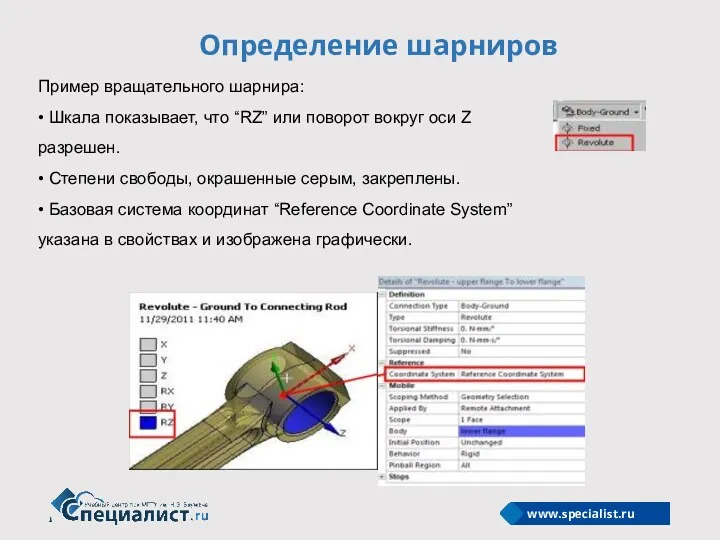
Определение шарниров
Пример вращательного шарнира:
• Шкала показывает, что “RZ” или поворот вокруг
Определение шарниров
Пример вращательного шарнира:
• Шкала показывает, что “RZ” или поворот вокруг
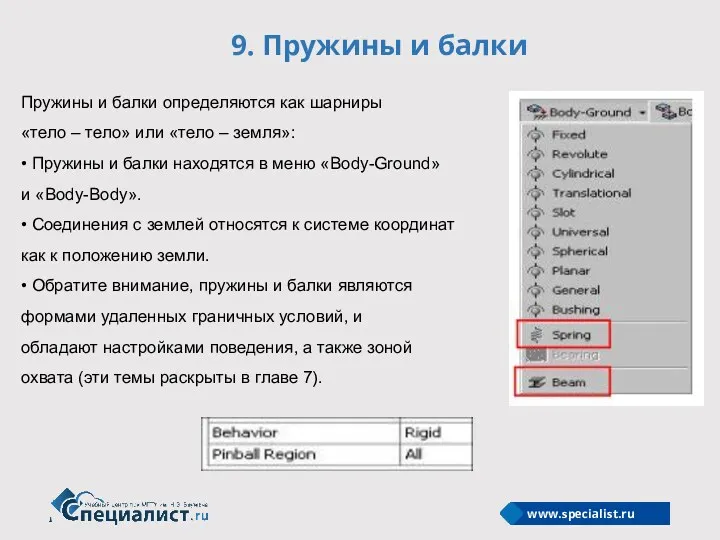
9. Пружины и балки
Пружины и балки определяются как шарниры
«тело – тело»
9. Пружины и балки
Пружины и балки определяются как шарниры
«тело – тело»
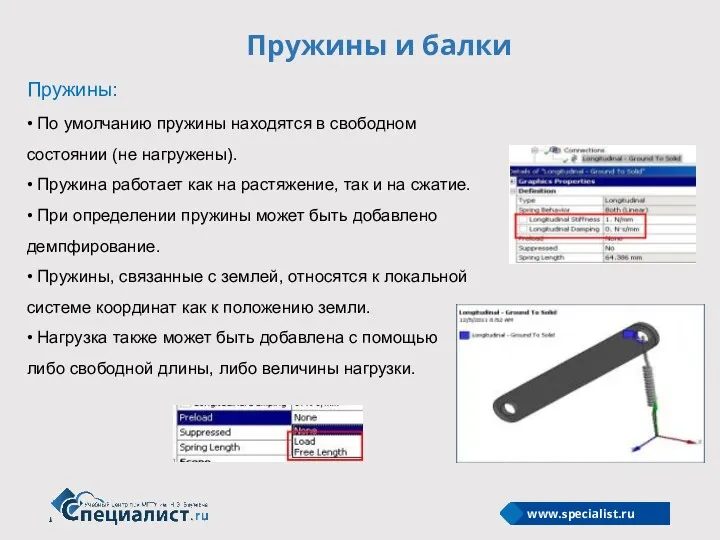
Пружины и балки
Пружины:
• По умолчанию пружины находятся в свободном
состоянии (не нагружены).
•
Пружины и балки
Пружины:
• По умолчанию пружины находятся в свободном
состоянии (не нагружены).
•

Пружины и балки
Балки:
• Создаются балки с круглым сечением. Радиус задается
Пружины и балки
Балки:
• Создаются балки с круглым сечением. Радиус задается

10. Пример 4.2 – Использование шарниров
10. Пример 4.2 – Использование шарниров
11. Приложение
• Конфигурация шарниров
• Опции Stops и Locks
11. Приложение
• Конфигурация шарниров
• Опции Stops и Locks
Настройка конфигурации шарниров
Настройка конфигурации шарнира позволяет изменять его
начальное положение без редактирования
Настройка конфигурации шарниров
Настройка конфигурации шарнира позволяет изменять его
начальное положение без редактирования
Настройка конфигурации шарниров
Настройка конфигурации шарниров также используется, для качественного “тестирования” движения
Настройка конфигурации шарниров
Настройка конфигурации шарниров также используется, для качественного “тестирования” движения
Настройка конфигурации шарниров
Поскольку движения в шарнирах определяются в соответствии с их
Настройка конфигурации шарниров
Поскольку движения в шарнирах определяются в соответствии с их
Настройка конфигурации шарниров
В режиме редактирования кликните на ось
СК для задания
Настройка конфигурации шарниров
В режиме редактирования кликните на ось СК для задания
Настройка конфигурации шарниров
В дополнение к ручному
переориентированию системы координат
шарнира доступны также
преобразования, что
Настройка конфигурации шарниров
В дополнение к ручному
переориентированию системы координат
шарнира доступны также
преобразования, что
 Мальчики и миф о настоящем мужчине. Риски, проблемы и перспективы решения
Мальчики и миф о настоящем мужчине. Риски, проблемы и перспективы решения Презентация Профессиональная компетентность учителя: содержание, структура, оценка,
Презентация Профессиональная компетентность учителя: содержание, структура, оценка, Экстрагенитальные заболевания и беременность
Экстрагенитальные заболевания и беременность Казнить нельзя, помиловать. Смертная казнь
Казнить нельзя, помиловать. Смертная казнь Презентация Талантливый поэт моей земли - С.Я.Маршак
Презентация Талантливый поэт моей земли - С.Я.Маршак эколог
эколог Методы измерения и синтеза наночастиц
Методы измерения и синтеза наночастиц Влияние pH на микроорганизмы
Влияние pH на микроорганизмы Обработка боковых и нижнего срезов изделия
Обработка боковых и нижнего срезов изделия 2нче сыйныф өчен татар теленнән кулланма
2нче сыйныф өчен татар теленнән кулланма Дискретное преобразование Фурье. Вычисление сверток с помощью ДПФ
Дискретное преобразование Фурье. Вычисление сверток с помощью ДПФ Физминутка Дракоша
Физминутка Дракоша Кодирование информации. 5 класс
Кодирование информации. 5 класс Бутерброд-networking
Бутерброд-networking Урок Периодический закон Д.И. Менделеева 9 класс.
Урок Периодический закон Д.И. Менделеева 9 класс. Флотационные реагенты, применяемые при флотации руд редких и благородных металлов
Флотационные реагенты, применяемые при флотации руд редких и благородных металлов Шаблон для создания презентации. Синий шелк. Диск
Шаблон для создания презентации. Синий шелк. Диск математика
математика Работа с одаренными детьми в условиях реализации ФГОС
Работа с одаренными детьми в условиях реализации ФГОС Лабораторные работы как способ формирования метапредметного учебного результата
Лабораторные работы как способ формирования метапредметного учебного результата Пословица - всем делам помощница!
Пословица - всем делам помощница! Приглашение к сотрудничеству
Приглашение к сотрудничеству Презентация к конспекту занятия в группе старшего возраста для детей с ТНР по теме: Дикие животные весной
Презентация к конспекту занятия в группе старшего возраста для детей с ТНР по теме: Дикие животные весной Паровая машина Ньюкомена
Паровая машина Ньюкомена Сүт безі қатерлі ісігі
Сүт безі қатерлі ісігі Интегрированный урок математика+география
Интегрированный урок математика+география Русь при внуках Ярослава Мудрого. Владимир Мономах
Русь при внуках Ярослава Мудрого. Владимир Мономах Здоровье школьника - правильная осанка
Здоровье школьника - правильная осанка