- Математическое моделирование. Форма и принципы представления математических моделей

Содержание
- 2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ Моделирование - это замещение некоторого объекта А другим объектом Б. Замещаемый объект А называется
- 3. КЛАССИФИКАЦИЯ МОДЕЛЕЙ модели вещественные натурные физические математические идеальные наглядные знаковые математические
- 4. Вещественные натурные модели - это реальные объекты, процессы и системы, над которыми выполняются эксперименты научные, технические
- 5. ИДЕАЛЬНЫЕ МОДЕЛИ Идеальные наглядные модели - это схемы, карты, чертежи, графики, графы, аналоги, структурные и геометрические
- 6. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ Математическое моделирование - это средство изучения реального объекта, процесса или системы путем их замены
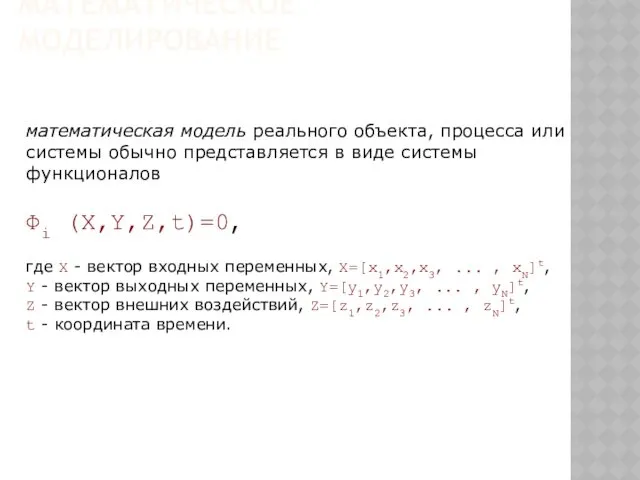
- 7. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ математическая модель реального объекта, процесса или системы обычно представляется в виде системы функционалов Фi
- 8. ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ Предварительно производится выявление и исключение из рассмотрения факторов, несущественно влияющих на конечный результат.
- 9. ФОРМА И ПРИНЦИПЫ ПРЕДСТАВЛЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ По принципам построения математические модели разделяют на: аналитические имитационные В
- 10. ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ В имитационном моделировании функционирование объектов, процессов или систем описывается набором алгоритмов. Алгоритмы имитируют реальные
- 11. КЛАССИФИКАЦИЯ МОДЕЛЕЙ В зависимости от характера исследуемых реальных процессов и систем математические модели могут быть: детерминированные
- 12. КЛАССИФИКАЦИЯ МОДЕЛЕЙ По виду входной информации математические модели разделяются на: непрерывные, дискретные. Если информация и параметры
- 13. КЛАССИФИКАЦИЯ МОДЕЛЕЙ По поведению моделей во времени они разделяются на: статические, динамические. Статические модели описывают поведение
- 14. КЛАССИФИКАЦИЯ МОДЕЛЕЙ По степени соответствия между математической моделью и реальным объектом, процессом или системой математические модели
- 15. Особенности построения математических моделей МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
- 16. Математические модели в количественной форме, с помощью логико-математических конструкций, описывают основные свойства объекта, процесса или системы,
- 17. ПОСТРОЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ тщательно проанализировать реальный объект или процесс; выделить его наиболее существенные черты и свойства;
- 18. ПОСТРОЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ Математическое моделирование, кроме исследования объекта, процесса или системы и составления их математического описания,
- 19. Математическое описание исследуемых процессов и систем зависит от: природы реального процесса или системы и составляется на
- 20. МОДЕЛЬ КШМ Кинематическая схема Не учитываются конструктивные формы и расположение масс, входящих в механизм тел, и
- 21. когда наши знания об изучаемом объекте, процессе или системе недостаточны, то при построении математической модели приходится
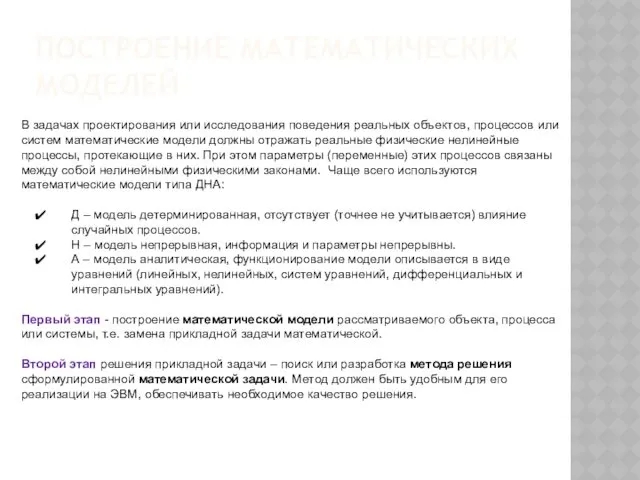
- 22. ПОСТРОЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ В задачах проектирования или исследования поведения реальных объектов, процессов или систем математические модели
- 23. МЕТОДЫ РЕШЕНИЯ МАТЕМАТИЧЕСКИХ ЗАДАЧ точные методы решения задач численные методы решения задач точные методы - имеется
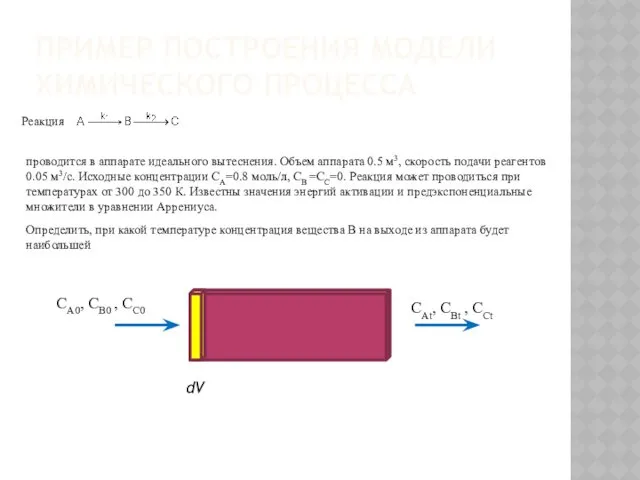
- 24. ПРИМЕР ПОСТРОЕНИЯ МОДЕЛИ ХИМИЧЕСКОГО ПРОЦЕССА Реакция проводится в аппарате идеального вытеснения. Объем аппарата 0.5 м3, скорость
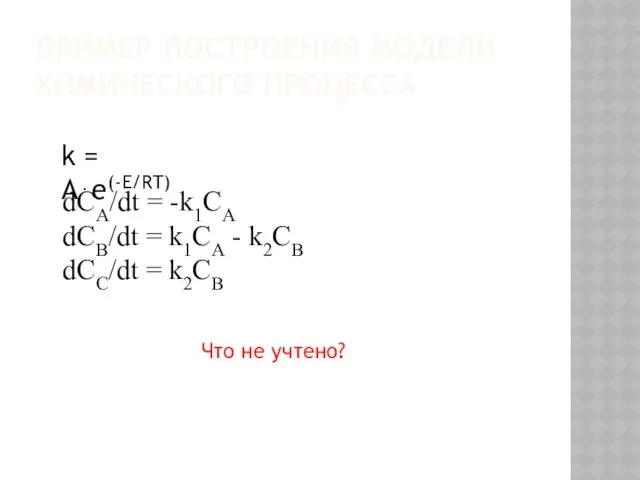
- 25. ПРИМЕР ПОСТРОЕНИЯ МОДЕЛИ ХИМИЧЕСКОГО ПРОЦЕССА k = A⋅e(-E/RT) dCА/dt = -k1CА dCВ/dt = k1CА - k2CВ
- 26. МЕТОД ПРЯМОУГОЛЬНИКОВ ДЛЯ ПРИБЛИЖЕННОГО ИНТЕГРИРОВАНИЯ x1=a – нижний предел интегрирования; xn+1=b – верхний предел интегрирования; n
- 27. ЧИСЛЕННЫЕ МЕТОДЫ Приближенные вычисления
- 28. ПРИЧИНЫ ПОГРЕШНОСТЕЙ Несоответствие математической модели изучаемому реальному явлению Погрешность исходных данных. Погрешность метода решения (приближенные методы).
- 29. ПОГРЕШНОСТИ МЕТОДА погрешность дискретизации погрешность округления
- 30. ПРИБЛИЖЕННЫЕ ЧИСЛА абсолютная погрешность предельная абсолютная погрешность относительная погрешность предельная относительная погрешность
- 31. ЗАПИСЬ ПРИБЛИЖЕННЫХ ЧИСЕЛ
- 32. ЗНАЧАЩИЕ ЦИФРЫ Значащими цифрами называются все цифры в его представлении, начиная с первой отличной от нуля
- 33. ЗНАЧАЩИЕ ЦИФРЫ предельная абсолютная погрешность определяется числом десятичных знаков после запятой: чем меньше десятичных знаков после
- 34. ОКРУГЛЕНИЕ Округлением (по дополнению) числа называется запись этого числа с меньшим количеством разрядов по следующему правилу:
- 35. ДЕЙСТВИЯ НАД ПРИБЛИЖЕННЫМИ ЧИСЛАМИ Предельная абсолютная погрешность алгебраической суммы равна сумме предельных абсолютных погрешностей слагаемых. Относительная
- 36. ДЕЙСТВИЯ НАД ПРИБЛИЖЕННЫМИ ЧИСЛАМИ При сложении и вычитании приближённых чисел в результате следует сохранять столько десятичных
- 37. ЧИСЛЕННЫЕ МЕТОДЫ Случайные величины
- 38. НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ σ - среднеквадратичное отклонение, f(x) – функция плотности вероятности, показывающая вероятность того,
- 39. НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
- 40. НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ σ - среднеквадратичное отклонение, f(x) – функция плотности вероятности, показывающая вероятность того,
- 41. НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ σ - среднеквадратичное отклонение, f(x) – функция плотности вероятности, показывающая вероятность того,
- 42. НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ σ - среднеквадратичное отклонение, f(x) – функция плотности вероятности, показывающая вероятность того,
- 43. НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ σ - среднеквадратичное отклонение, f(x) – функция плотности вероятности, показывающая вероятность того,
- 44. ЧИСЛЕННЫЕ МЕТОДЫ методы уточнения приближенных значений уравнений
- 45. МЕТОД ДЕЛЕНИЯ ОТРЕЗКА ПОПОЛАМ
- 46. МЕТОД ДЕЛЕНИЯ ОТРЕЗКА ПОПОЛАМ
- 47. X2 ⋅ LOG0,5(X + 1) = 1.
- 48. МЕТОД ХОРД f(b) ⋅ f″(b) > 0 f(a) ⋅ f″(a) > 0
- 49. МЕТОД ХОРД
- 50. МЕТОД НЬЮТОНА (МЕТОД КАСАТЕЛЬНЫХ)
- 51. МЕТОД НЬЮТОНА (ВАРИАНТ С 1 ПРОИЗВОДНОЙ)
- 52. X – SIN(X) = 0,25 [0,982; 1,178]: a = 0,982, b = 1,178
- 53. МЕТОД НЬЮТОНА (СХОДИМОСТЬ)
- 54. МЕТОД НЬЮТОНА F(X)=X^3-2X+2 (X0=0)
- 55. БЛОК-СХЕМА МЕТОДА
- 56. РЕШЕНИЕ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ
- 57. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ Системой линейных уравнений (л.у.) называется совокупность (набор) из нескольких уравнений от одного и
- 58. МАТРИЧНАЯ ФОРМА ЗАПИСИ СЛАУ Матрицей системы л.у. называется форма где: - матрица коэффициентов — столбец правых
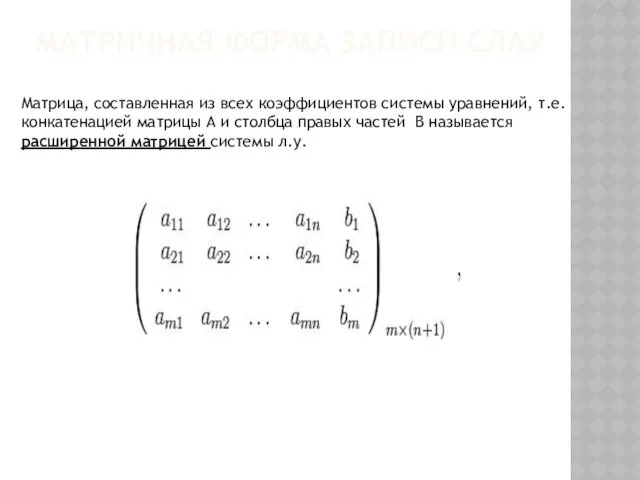
- 59. МАТРИЧНАЯ ФОРМА ЗАПИСИ СЛАУ Матрица, составленная из всех коэффициентов системы уравнений, т.е. конкатенацией матрицы А и
- 60. ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА) Пример. Решить систему уравнений
- 61. ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА) и подставим в оставшиеся уравнения Решение. Выразим из первого уравнения х1 Два
- 62. ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА) Иными словами, мы получили новую подсистему уравнений которой должны удовлетворять неизвестные х2
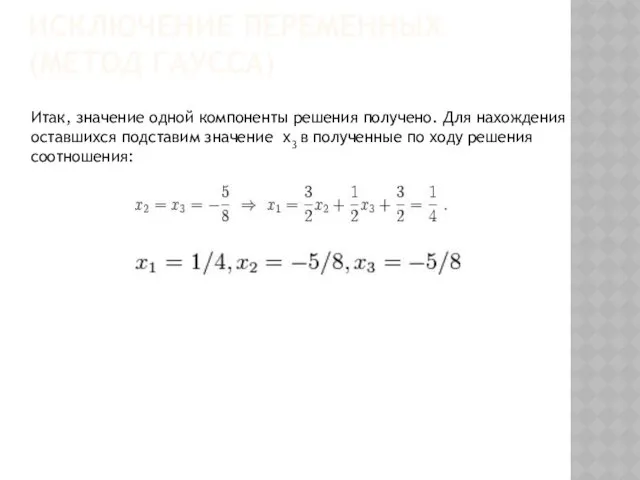
- 63. ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА) Итак, значение одной компоненты решения получено. Для нахождения оставшихся подставим значение х3
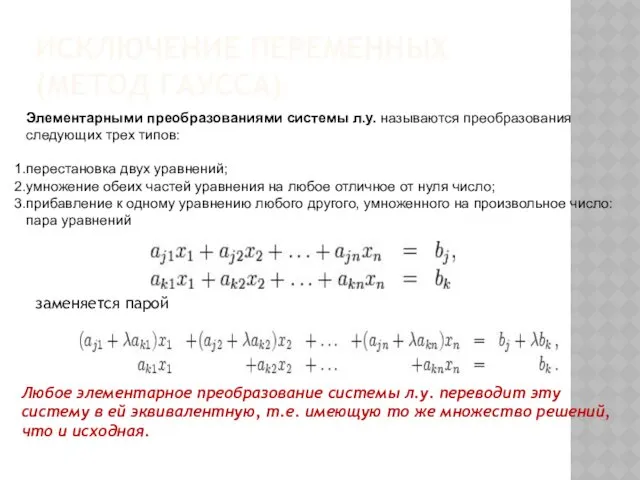
- 64. ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА) Элементарными преобразованиями системы л.у. называются преобразования следующих трех типов: перестановка двух уравнений;
- 65. МЕТОД ГАУССА Предположим, что первое уравнение системы содержит явно неизвестную х1 , т.е. а11 0. Исключим
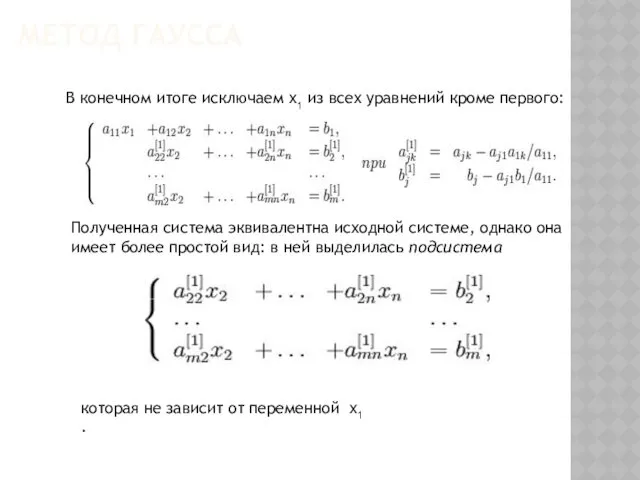
- 66. МЕТОД ГАУССА В конечном итоге исключаем х1 из всех уравнений кроме первого: Полученная система эквивалентна исходной
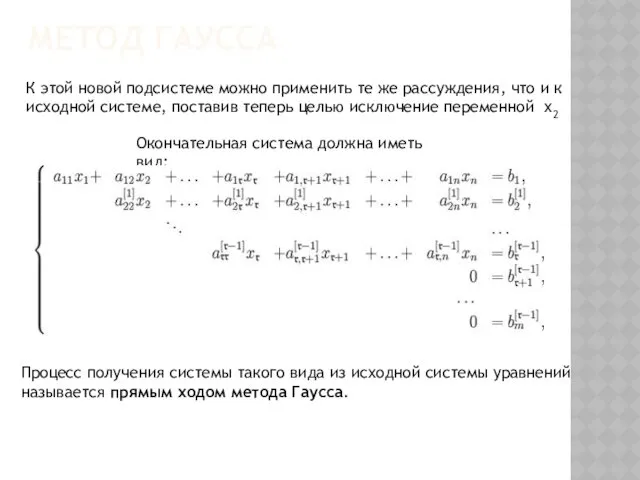
- 67. МЕТОД ГАУССА К этой новой подсистеме можно применить те же рассуждения, что и к исходной системе,
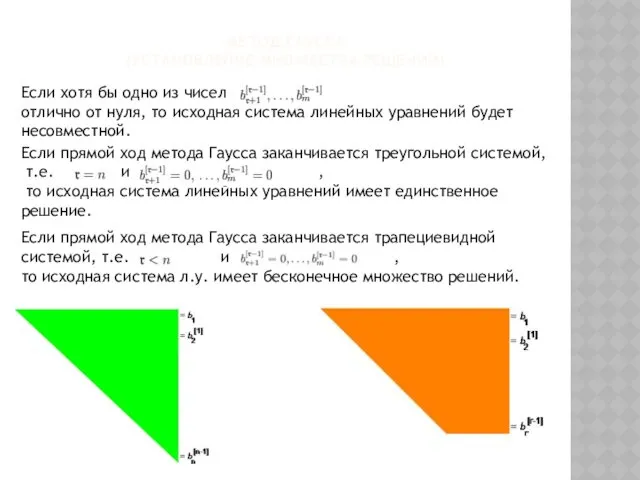
- 68. МЕТОД ГАУССА (УСТАНОВЛЕНИЕ МНОЖЕСТВА РЕШЕНИЙ) Если хотя бы одно из чисел отлично от нуля, то исходная
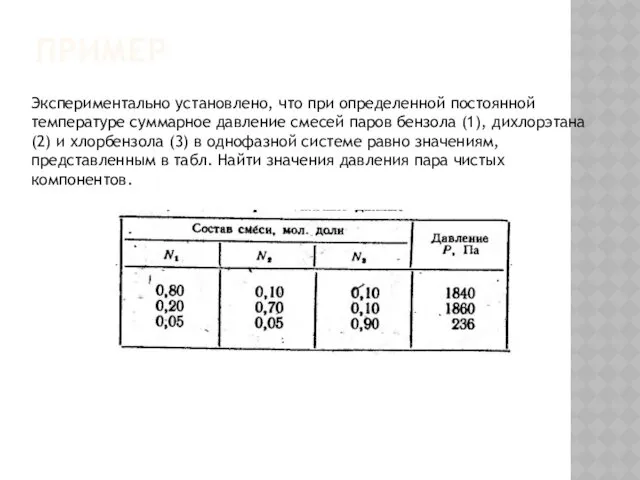
- 69. ПРИМЕР Экспериментально установлено, что при определенной постоянной температуре суммарное давление смесей паров бензола (1), дихлорэтана (2)
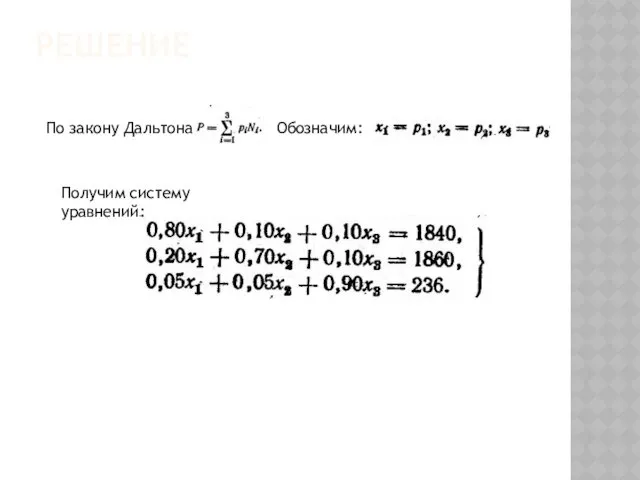
- 70. РЕШЕНИЕ По закону Дальтона Получим систему уравнений: Обозначим:
- 71. РЕШЕНИЕ МЕТОДОМ ГАУССА
- 72. ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ Требуется решить систему уравнений в виде где
- 73. ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ Перепишем уравнение в виде: Здесь в j-м уравнении мы перенесли в
- 74. ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ после выбора соответствующего начального приближения итерационный процесс строится по формуле: Значения
- 75. ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ Условие окончания итерационного процесса Зейделя при достижении точности ε в упрощённой
- 76. ПРИМЕР Условие сходимости выполняется:
- 77. РЕШЕНИЕ
- 78. ЧИСЛЕННЫЕ МЕТОДЫ Моделирование многомерных нелинейных систем
- 79. МОДЕЛИРОВАНИЕ МНОГОМЕРНЫХ НЕЛИНЕЙНЫХ СИСТЕМ В задачах проектирования и исследования поведения реальных объектов, процессов и систем (ОПС)
- 80. РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ Дана система нелинейных уравнений или Необходимо решить эту систему, т.е. найти вектор
- 81. РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ В отличие от систем линейных уравнений для систем нелинейных уравнений неизвестны прямые
- 82. МЕТОД ПРОСТЫХ ИТЕРАЦИЙ Преобразуем систему уравнений: К виду: или:
- 83. МЕТОД ПРОСТЫХ ИТЕРАЦИЙ выбираем начальное приближение Находим приближенные значения корней: используя значения переменных, полученных на шаге
- 84. Метод простых итераций используется для решения таких систем нелинейных уравнений, в которых выполняется условие сходимости итерационного
- 85. АЛГОРИТМ
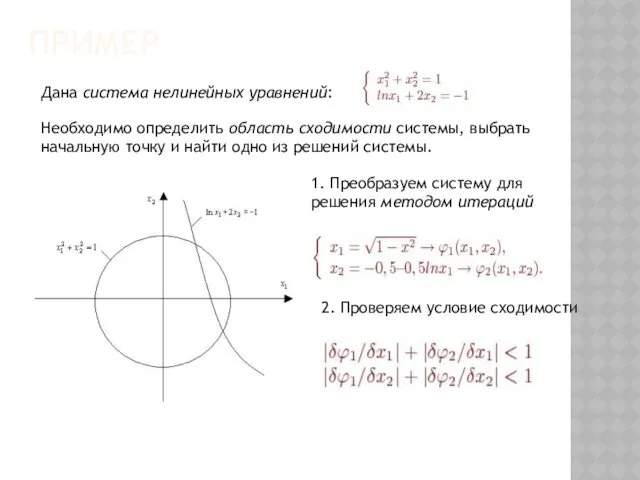
- 86. ПРИМЕР Дана система нелинейных уравнений: Необходимо определить область сходимости системы, выбрать начальную точку и найти одно
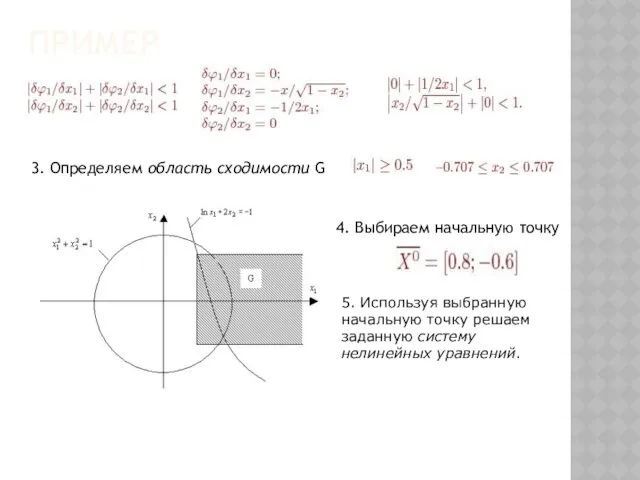
- 87. ПРИМЕР 3. Определяем область сходимости G 4. Выбираем начальную точку 5. Используя выбранную начальную точку решаем
- 88. РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ МЕТОДОМ НЬЮТОНА
- 89. ЧИСЛЕННЫЕ МЕТОДЫ Обработка экспериментальных данных
- 90. ПРЕДСТАВЛЕНИЕ ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ Табличная форма (xi, yi) - узловые точки
- 91. ИНТЕРПОЛЯЦИЯ интерполяция – нахождение значения таблично заданной функции в тех точках внутри данного интервала, где она
- 92. ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОЙ ФУНКЦИИ выбор интерполяционной функции ϕ(х); оценка погрешности R(x); размещение узлов интерполяции для обеспечения возможной
- 93. ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОЙ ФУНКЦИИ Задача решается при помощи нахождения аналитического выражения некоторой вспомогательной функции F(x), которая приближала
- 94. ЗАДАЧА ИНТЕРПОЛЯЦИИ Задача: для функции , заданной таблично, построить интерполяционный многочлен степени n, который проходит через
- 95. ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОГО МНОГОЧЛЕНА В ЯВНОМ ВИДЕ Для построения интерполяционного многочлена необходимо определить его коэффициенты a0, a1,
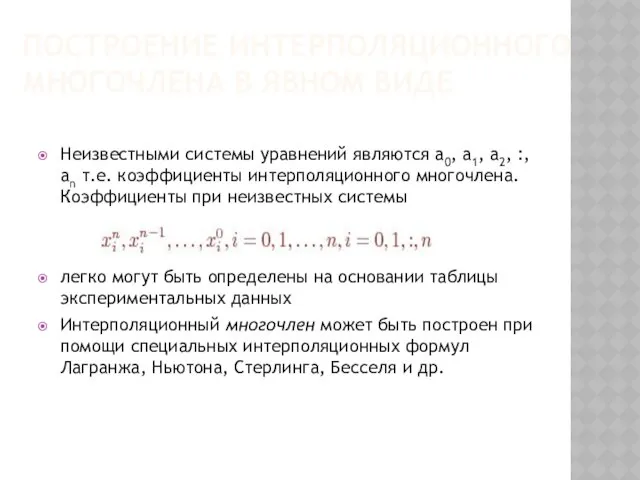
- 96. ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОГО МНОГОЧЛЕНА В ЯВНОМ ВИДЕ Неизвестными системы уравнений являются a0, a1, a2, :, an т.е.
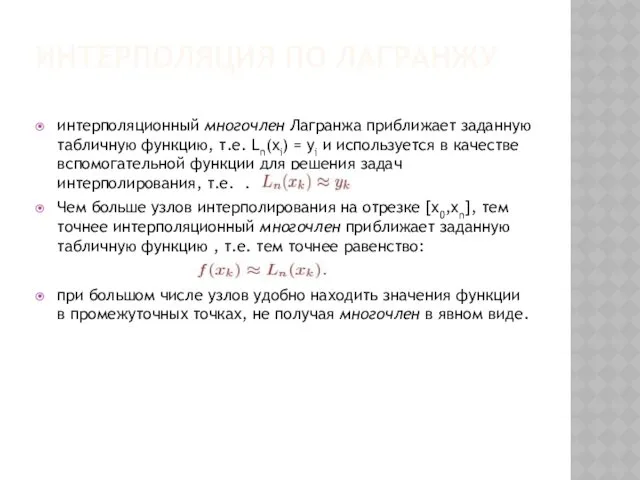
- 97. ИНТЕРПОЛЯЦИЯ ПО ЛАГРАНЖУ Интерполяционный многочлен по формуле Лагранжа имеет вид: если x=x0, то Ln(x0) = y0,
- 98. ИНТЕРПОЛЯЦИЯ ПО ЛАГРАНЖУ интерполяционный многочлен Лагранжа приближает заданную табличную функцию, т.е. Ln(xi) = yi и используется
- 99. ПРОГРАММИРОВАНИЕ ФОРМУЛЫ ЛАГРАНЖА В общем виде формула Лагранжа имеет вид: где при условии
- 100. Алгоритм не предусматривает получение интерполяционного многочлена в явном виде, а сразу решает задачу интерполирования функции в
- 101. ИНТЕРПОЛЯЦИЯ ПО НЬЮТОНУ Дана табличная функция: Необходимо найти значение этой функции в промежуточной точке, например, x=D,
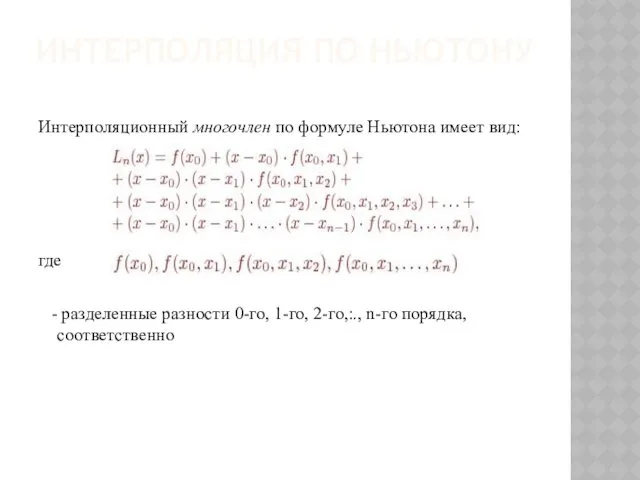
- 102. Интерполяционный многочлен по формуле Ньютона имеет вид: где - разделенные разности 0-го, 1-го, 2-го,:., n-го порядка,
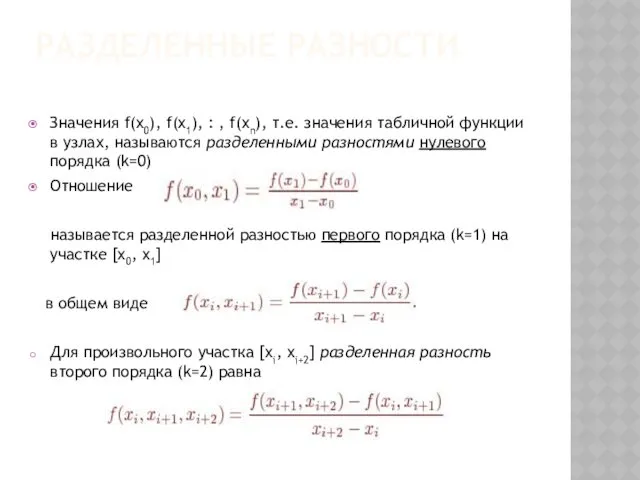
- 103. РАЗДЕЛЕННЫЕ РАЗНОСТИ Значения f(x0), f(x1), : , f(xn), т.е. значения табличной функции в узлах, называются разделенными
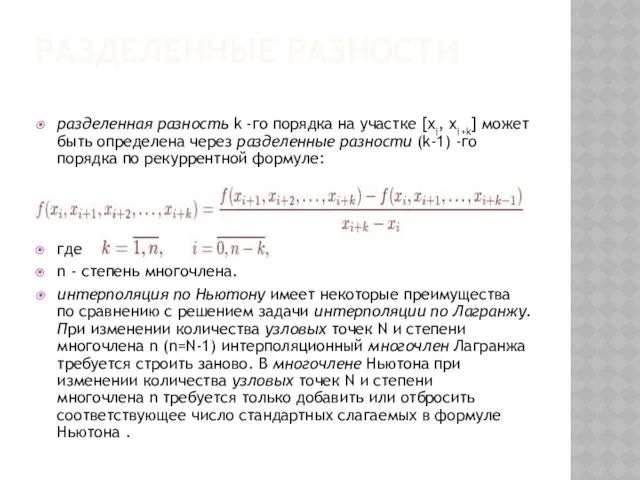
- 104. РАЗДЕЛЕННЫЕ РАЗНОСТИ разделенная разность k -го порядка на участке [xi, xi+k] может быть определена через разделенные
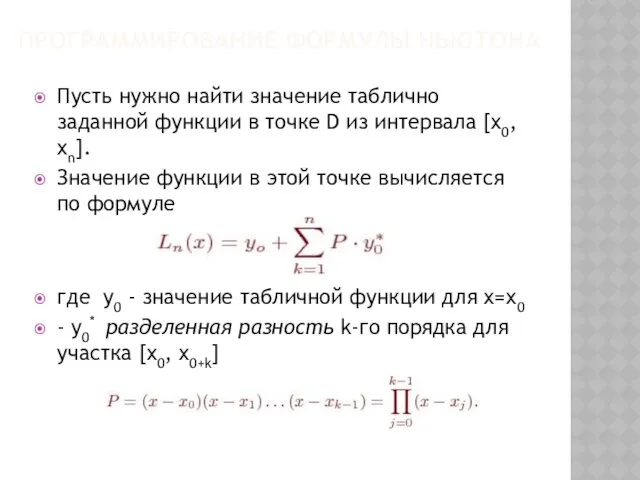
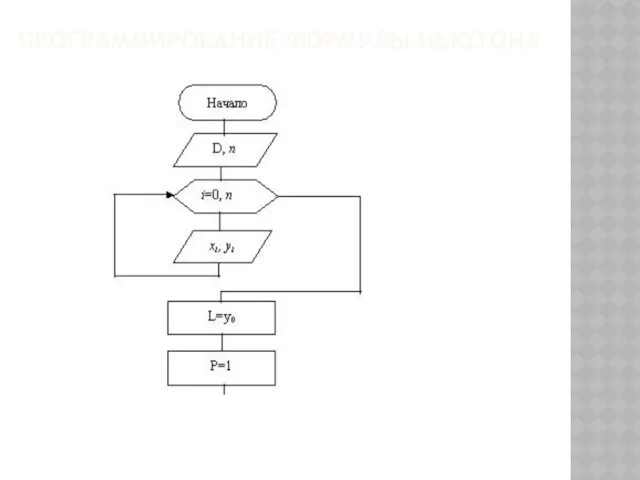
- 105. ПРОГРАММИРОВАНИЕ ФОРМУЛЫ НЬЮТОНА Пусть нужно найти значение таблично заданной функции в точке D из интервала [x0,
- 106. ПРОГРАММИРОВАНИЕ ФОРМУЛЫ НЬЮТОНА
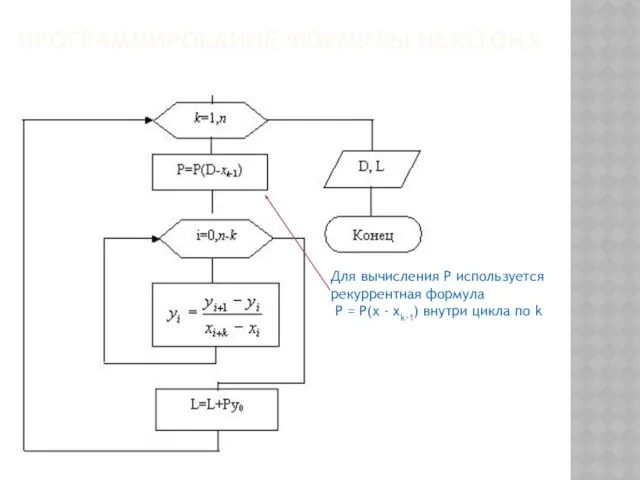
- 107. ПРОГРАММИРОВАНИЕ ФОРМУЛЫ НЬЮТОНА Для вычисления Р используется рекуррентная формула P = P(x - xk-1) внутри цикла
- 108. СПЛАЙН-ИНТЕРПОЛЯЦИЯ Сплайны (в черчении) - это лекала или гибкие линейки, деформация которых позволяет провести кривую через
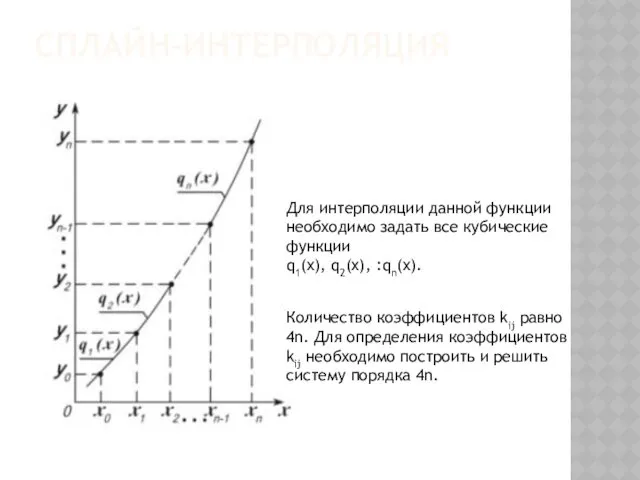
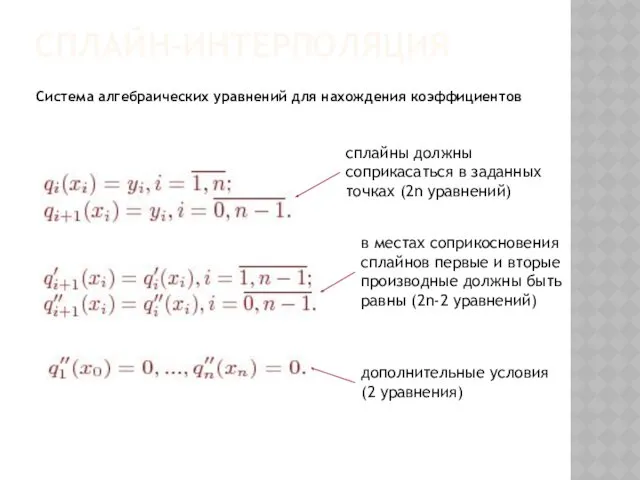
- 109. СПЛАЙН-ИНТЕРПОЛЯЦИЯ Для интерполяции данной функции необходимо задать все кубические функции q1(x), q2(x), :qn(x). Количество коэффициентов kij
- 110. СПЛАЙН-ИНТЕРПОЛЯЦИЯ сплайны должны соприкасаться в заданных точках (2n уравнений) в местах соприкосновения сплайнов первые и вторые
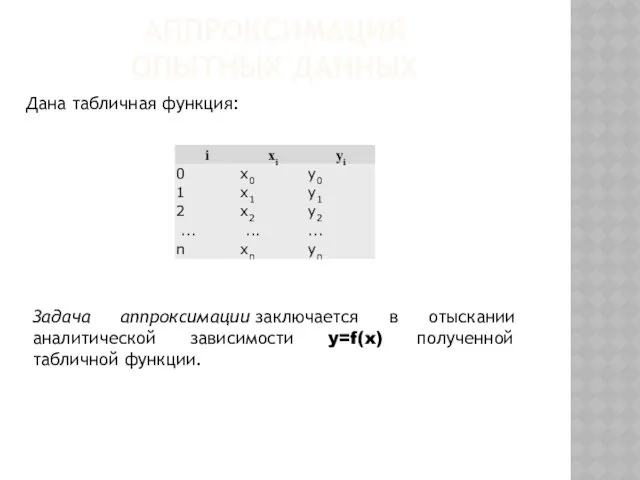
- 111. АППРОКСИМАЦИЯ ОПЫТНЫХ ДАННЫХ Дана табличная функция: Задача аппроксимации заключается в отыскании аналитической зависимости y=f(x) полученной табличной
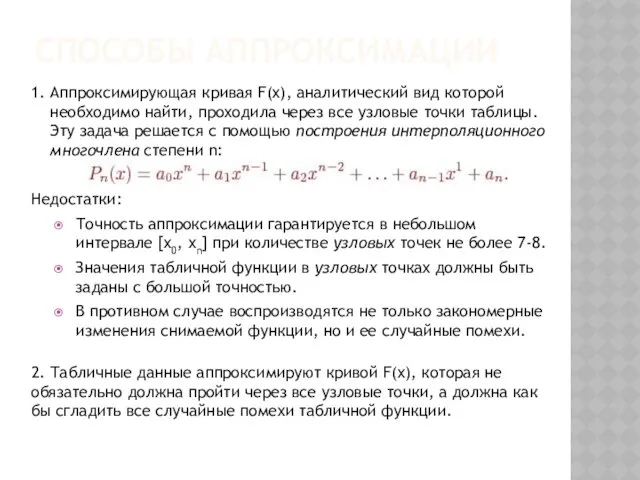
- 112. СПОСОБЫ АППРОКСИМАЦИИ 1. Аппроксимирующая кривая F(x), аналитический вид которой необходимо найти, проходила через все узловые точки
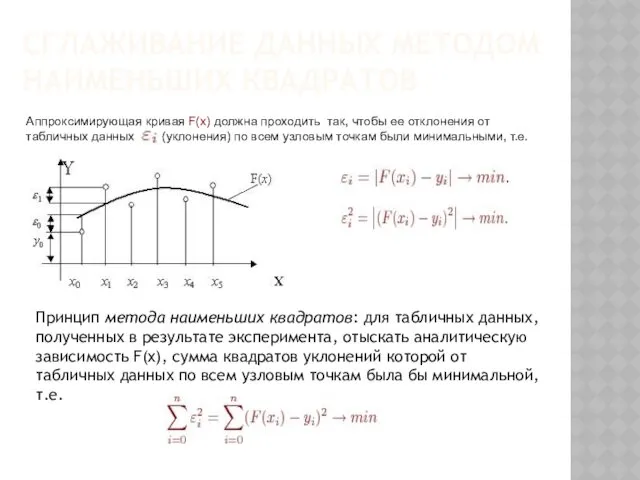
- 113. СГЛАЖИВАНИЕ ДАННЫХ МЕТОДОМ НАИМЕНЬШИХ КВАДРАТОВ Аппроксимирующая кривая F(x) должна проходить так, чтобы ее отклонения от табличных
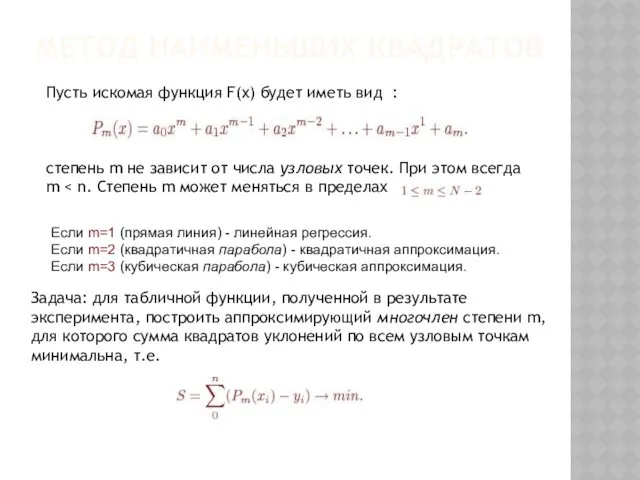
- 114. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ Пусть искомая функция F(x) будет иметь вид : степень m не зависит от
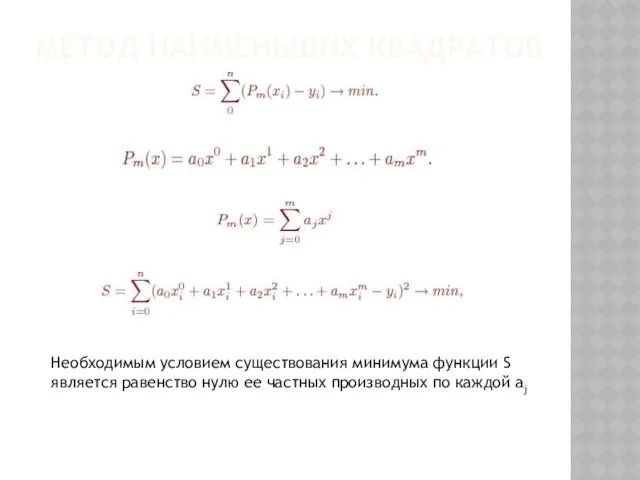
- 115. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ Необходимым условием существования минимума функции S является равенство нулю ее частных производных по
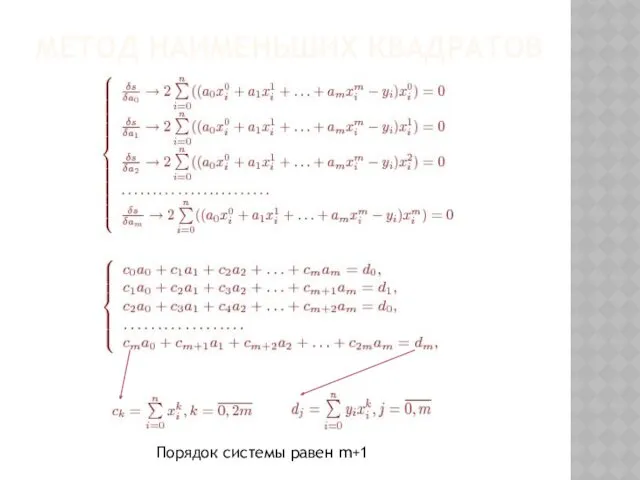
- 116. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ Порядок системы равен m+1
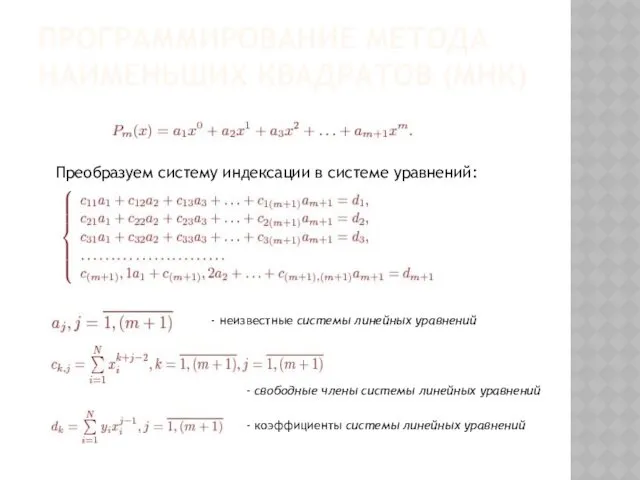
- 117. ПРОГРАММИРОВАНИЕ МЕТОДА НАИМЕНЬШИХ КВАДРАТОВ (МНК) Преобразуем систему индексации в системе уравнений: - неизвестные системы линейных уравнений
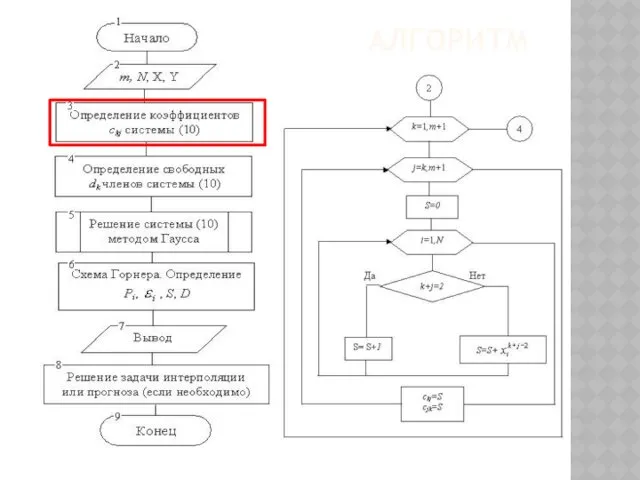
- 118. АЛГОРИТМ
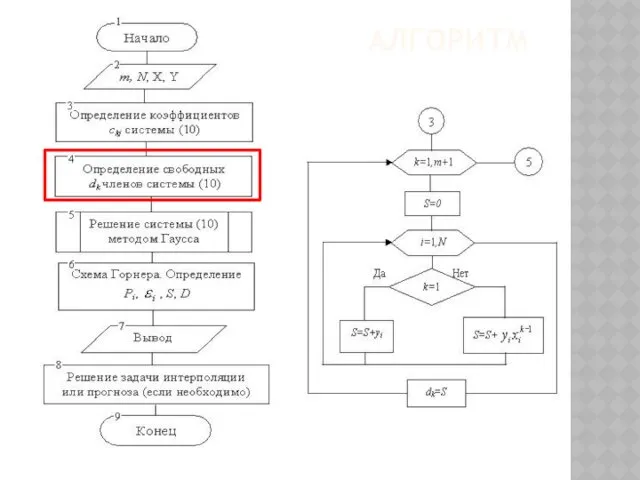
- 119. АЛГОРИТМ
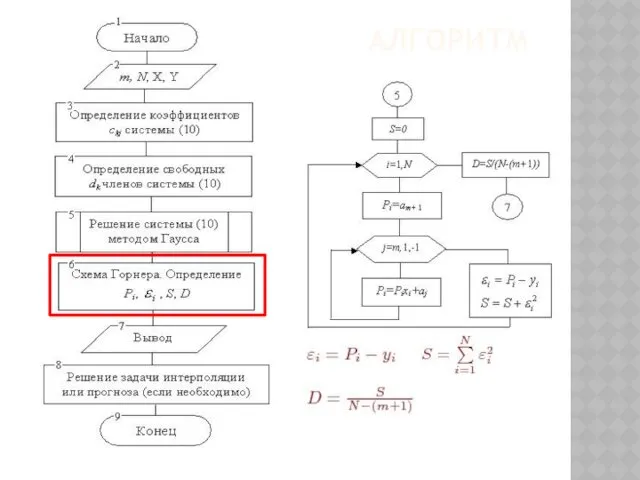
- 120. АЛГОРИТМ
- 121. ЧИСЛЕННЫЕ МЕТОДЫ Интегрирование
- 122. Динамические системы - это системы, в которых входные переменные являются функциями от времени или каких-либо других
- 123. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ дана функция y=f(x). Найти интеграл этой функции на участке [a,b], т.е. найти Если подынтегральная
- 124. Численные методы интегрирования применяются в следующих случаях: подынтегральная функция f(x) задана таблично на участке [a,b] ;
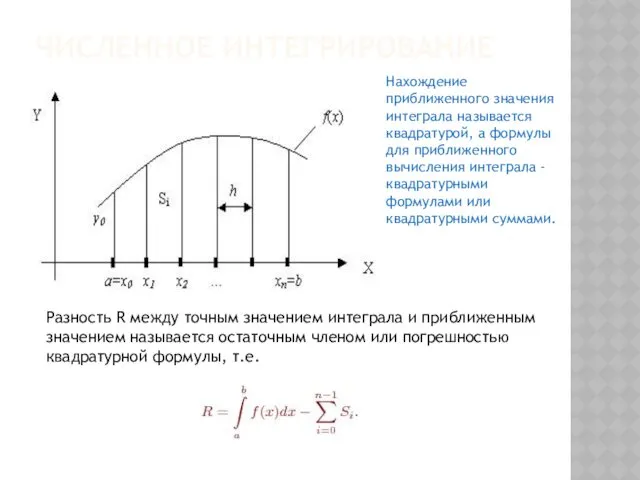
- 125. Интеграл численно равен площади S криволинейной трапеции, расположенной под подынтегральной кривой f(x)на участке [a,b] Смысл всех
- 126. При вычислении интеграла подынтегральная функция f(x) аппроксимируется интерполяционным многочленом. Порядок вычисления интеграла численными методами: Весь участок
- 127. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ Нахождение приближенного значения интеграла называется квадратурой, а формулы для приближенного вычисления интеграла - квадратурными
- 128. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ Если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом нулевой степени,
- 129. МЕТОД ПРЯМОУГОЛЬНИКОВ Весь участок [a,b] делим на n равных частей с шагом h=(b-a)/n. Определяем значение yi
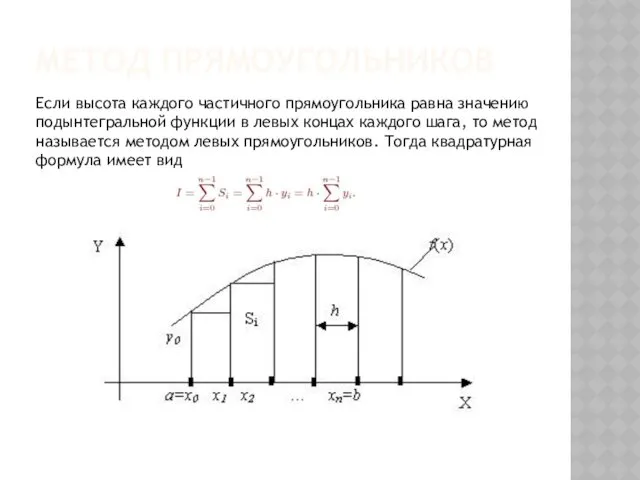
- 130. МЕТОД ПРЯМОУГОЛЬНИКОВ Если высота каждого частичного прямоугольника равна значению подынтегральной функции в левых концах каждого шага,
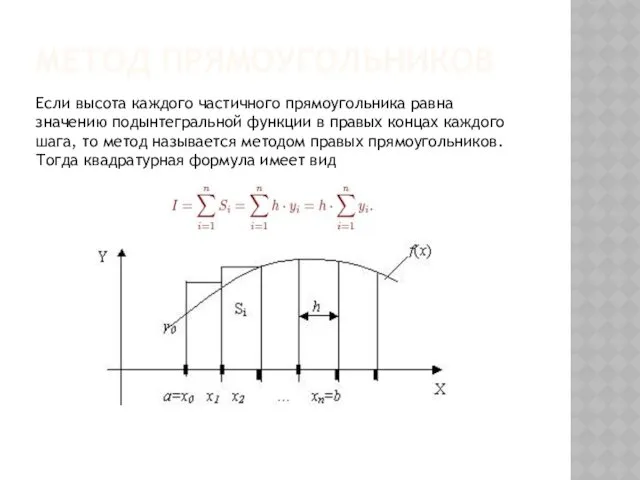
- 131. МЕТОД ПРЯМОУГОЛЬНИКОВ Если высота каждого частичного прямоугольника равна значению подынтегральной функции в правых концах каждого шага,
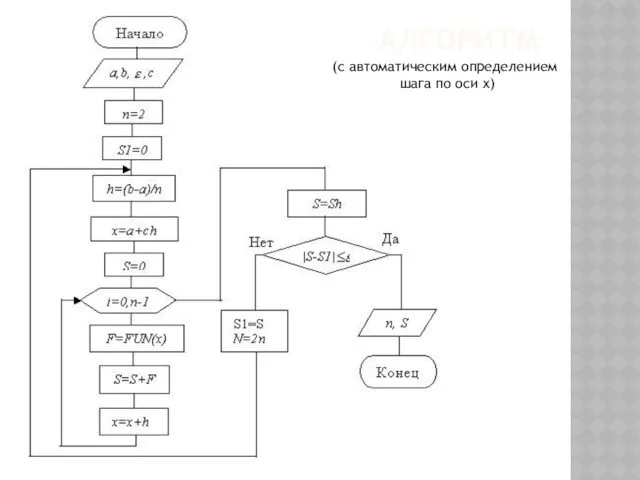
- 132. АЛГОРИТМ (с автоматическим определением шага по оси х)
- 133. Интервал [a,b] делим на n равных частей с шагом h=(b-a)/n. Вычисляем значение подынтегральной функции в каждой
- 134. Найдем площади Si частичных трапеций: МЕТОД ТРАПЕЦИЙ Приближенное значение интеграла равно
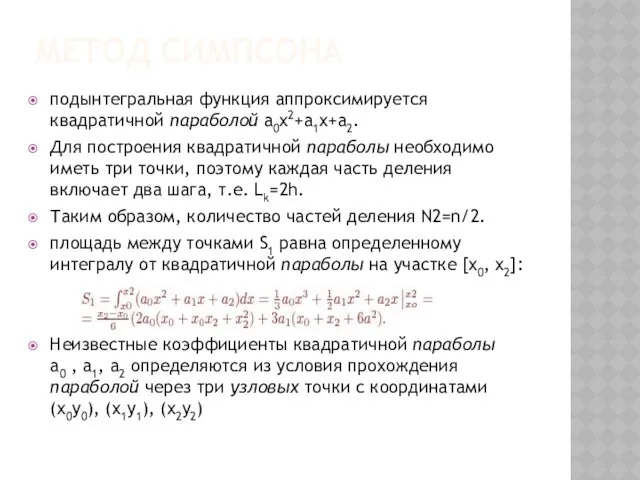
- 135. МЕТОД СИМПСОНА подынтегральная функция аппроксимируется квадратичной параболой a0x2+a1x+a2. Для построения квадратичной параболы необходимо иметь три точки,
- 136. МЕТОД СИМПСОНА На основании этого условия строим систему линейных уравнений: Решая эту систему, найдем коэффициенты параболы.
- 137. МЕТОД СИМПСОНА В результате имеем: Для участка [x2, x4]: Суммируя все площади S1 под квадратичными параболами,
- 138. АЛГОРИТМ
- 139. ЧИСЛЕННЫЕ МЕТОДЫ Дифференцирование
- 140. ПОСТАНОВКА ЗАДАЧИ Нормальная форма дифференциального уравнения y=y(x) -неизвестная функция, подлежащая определению f(x,y) - первая производная функции
- 141. РЕШЕНИЕ ДИФФ. УРАВНЕНИЙ Общим решением обыкновенного дифференциального уравнения является семейство функций у=у(х,с) В прикладных задачах ищут
- 142. РЕШЕНИЕ ЗАДАЧИ КОШИ Методы Рунге – Кутта: основаны на аппроксимации искомой функции у(х) в пределах каждого
- 143. МЕТОД РУНГЕ - КУТТА 1-ГО ПОРЯДКА (МЕТОД ЭЙЛЕРА) Используется только h1 Так как точность метода Эйлера
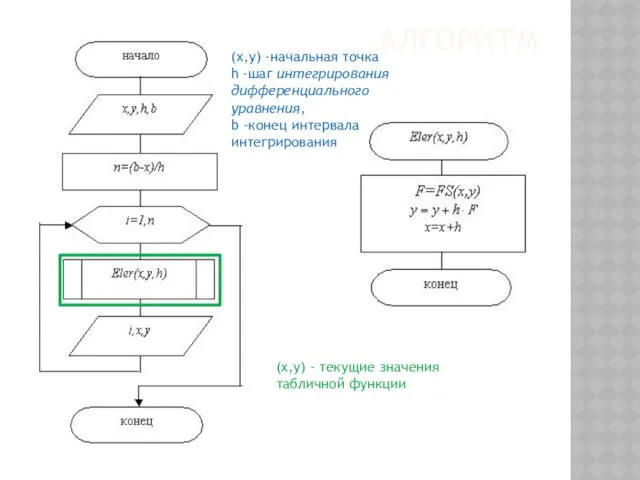
- 144. АЛГОРИТМ (x,y) -начальная точка h -шаг интегрирования дифференциального уравнения, b -конец интервала интегрирования (x,y) - текущие
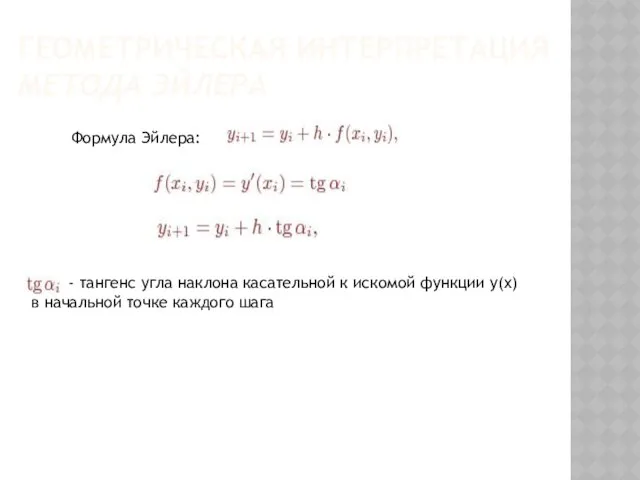
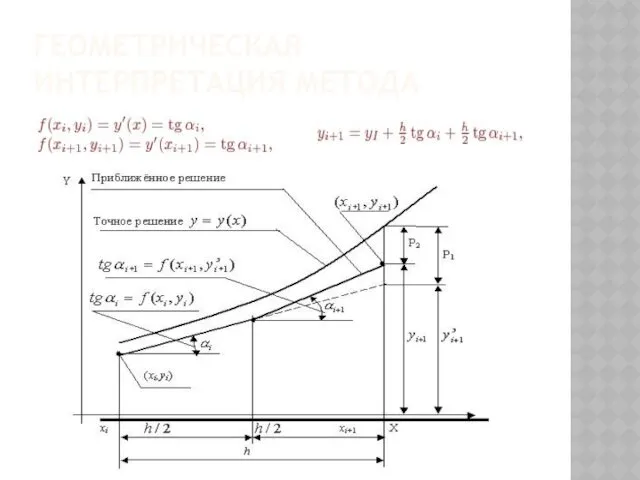
- 145. ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ МЕТОДА ЭЙЛЕРА Формула Эйлера:
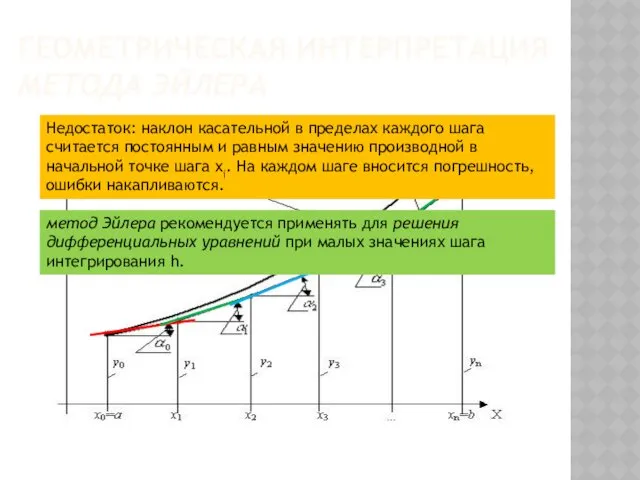
- 146. ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ МЕТОДА ЭЙЛЕРА Недостаток: наклон касательной в пределах каждого шага считается постоянным и равным значению
- 147. МЕТОД РУНГЕ - КУТТА 2-ГО ПОРЯДКА (МОД. МЕТОД ЭЙЛЕРА) ? нужно определить вторую производную y"(xi) !
- 148. ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ МЕТОДА
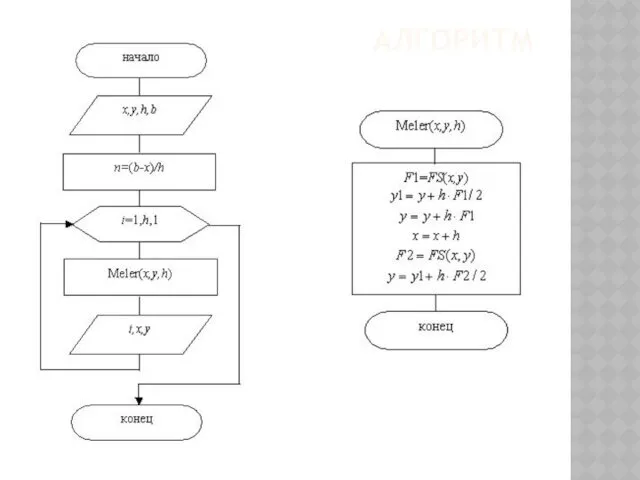
- 149. АЛГОРИТМ
- 150. МЕТОД РУНГЕ - КУТТА 4-ГО ПОРЯДКА (МЕТОД РУНГЕ - КУТТА) ошибка на каждом шаге имеет порядок
- 151. АЛГОРИТМ
- 152. РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ВТОРОГО ПОРЯДКА
- 153. РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ M-ГО ПОРЯДКА любое дифференциальное уравнение m-го порядка сводится к системе, состоящей из m
- 154. РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ M-ГО ПОРЯДКА каждая из табличных функций определяется на промежутке [a, b] с шагом
- 155. РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ M-ГО ПОРЯДКА каждому шагу интегрирования, т.е. каждому значению xi, соответствуют m узловых точек
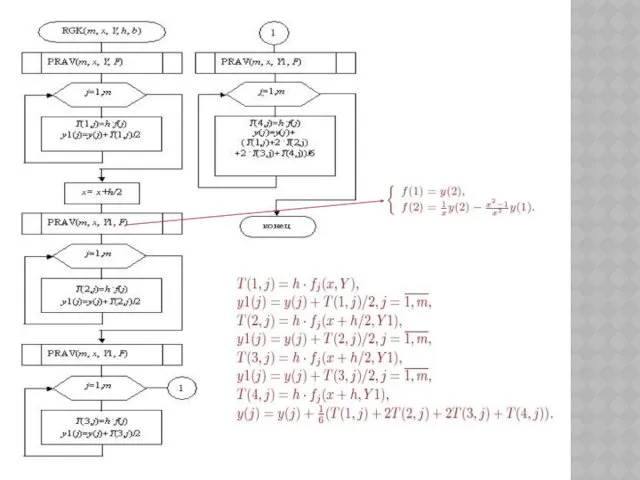
- 156. ПРИМЕР Дано дифференциальное уравнение второго порядка
- 157. ОСНОВНАЯ ПРОГРАММА m -порядок системы, h -шаг интегрирования, n -количество шагов интегрирования, x -начальное и далее
- 160. Скачать презентацию
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
Моделирование - это замещение некоторого объекта А другим объектом Б.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
Моделирование - это замещение некоторого объекта А другим объектом Б.
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
модели
вещественные
натурные
физические
математические
идеальные
наглядные
знаковые
математические
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
модели
вещественные
натурные
физические
математические
идеальные
наглядные
знаковые
математические
Вещественные натурные модели - это реальные объекты, процессы и системы, над
Вещественные натурные модели - это реальные объекты, процессы и системы, над
ИДЕАЛЬНЫЕ МОДЕЛИ
Идеальные наглядные модели - это схемы, карты, чертежи, графики, графы,
ИДЕАЛЬНЫЕ МОДЕЛИ
Идеальные наглядные модели - это схемы, карты, чертежи, графики, графы,
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Математическое моделирование - это средство изучения реального объекта, процесса или системы
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Математическое моделирование - это средство изучения реального объекта, процесса или системы
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
математическая модель реального объекта, процесса или системы обычно представляется в виде
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
математическая модель реального объекта, процесса или системы обычно представляется в виде
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Предварительно производится выявление и исключение из рассмотрения факторов, несущественно
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Предварительно производится выявление и исключение из рассмотрения факторов, несущественно
ФОРМА И ПРИНЦИПЫ ПРЕДСТАВЛЕНИЯ
МАТЕМАТИЧЕСКОЙ МОДЕЛИ
По принципам построения математические модели разделяют на:
аналитические
имитационные
В
ФОРМА И ПРИНЦИПЫ ПРЕДСТАВЛЕНИЯ
МАТЕМАТИЧЕСКОЙ МОДЕЛИ
По принципам построения математические модели разделяют на:
аналитические
имитационные
В
ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ
В имитационном моделировании функционирование объектов, процессов или систем описывается набором алгоритмов.
ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ
В имитационном моделировании функционирование объектов, процессов или систем описывается набором алгоритмов.
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
В зависимости от характера исследуемых реальных процессов и систем математические модели могут
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
В зависимости от характера исследуемых реальных процессов и систем математические модели могут
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
По виду входной информации математические модели разделяются на:
непрерывные,
дискретные.
Если информация и
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
По виду входной информации математические модели разделяются на:
непрерывные,
дискретные.
Если информация и
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
По поведению моделей во времени они разделяются на:
статические,
динамические.
Статические модели описывают
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
По поведению моделей во времени они разделяются на:
статические,
динамические.
Статические модели описывают
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
По степени соответствия между математической моделью и реальным объектом, процессом или
КЛАССИФИКАЦИЯ МОДЕЛЕЙ
По степени соответствия между математической моделью и реальным объектом, процессом или
Особенности построения математических моделей
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Особенности построения математических моделей
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Математические модели в количественной форме, с помощью логико-математических конструкций, описывают основные
Математические модели в количественной форме, с помощью логико-математических конструкций, описывают основные
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
тщательно проанализировать реальный объект или процесс;
выделить его наиболее существенные
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
тщательно проанализировать реальный объект или процесс;
выделить его наиболее существенные
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
Математическое моделирование, кроме исследования объекта, процесса или системы и
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
Математическое моделирование, кроме исследования объекта, процесса или системы и
Математическое описание исследуемых процессов и систем зависит от:
природы реального процесса или
Математическое описание исследуемых процессов и систем зависит от:
природы реального процесса или
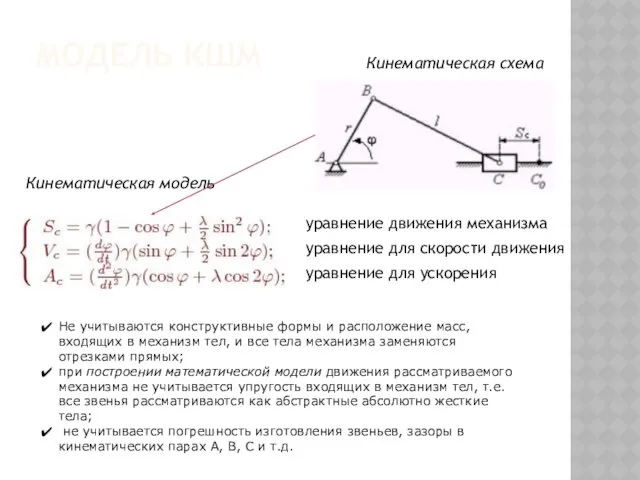
МОДЕЛЬ КШМ
Кинематическая схема
Не учитываются конструктивные формы и расположение масс, входящих в
МОДЕЛЬ КШМ
Кинематическая схема
Не учитываются конструктивные формы и расположение масс, входящих в
когда наши знания об изучаемом объекте, процессе или системе недостаточны, то
когда наши знания об изучаемом объекте, процессе или системе недостаточны, то
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
В задачах проектирования или исследования поведения реальных объектов, процессов
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
В задачах проектирования или исследования поведения реальных объектов, процессов
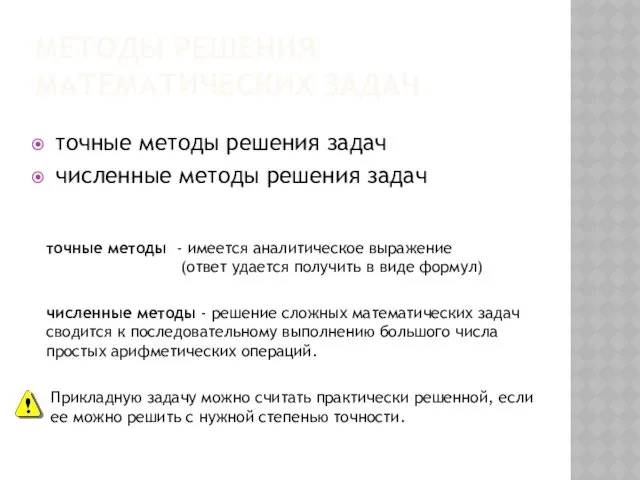
МЕТОДЫ РЕШЕНИЯ МАТЕМАТИЧЕСКИХ ЗАДАЧ
точные методы решения задач
численные методы решения задач
точные методы
МЕТОДЫ РЕШЕНИЯ МАТЕМАТИЧЕСКИХ ЗАДАЧ
точные методы решения задач
численные методы решения задач
точные методы
ПРИМЕР ПОСТРОЕНИЯ МОДЕЛИ ХИМИЧЕСКОГО ПРОЦЕССА
Реакция
проводится в аппарате идеального вытеснения. Объем
ПРИМЕР ПОСТРОЕНИЯ МОДЕЛИ ХИМИЧЕСКОГО ПРОЦЕССА
Реакция
проводится в аппарате идеального вытеснения. Объем
ПРИМЕР ПОСТРОЕНИЯ МОДЕЛИ ХИМИЧЕСКОГО ПРОЦЕССА
k = A⋅e(-E/RT)
dCА/dt = -k1CА
dCВ/dt =
ПРИМЕР ПОСТРОЕНИЯ МОДЕЛИ ХИМИЧЕСКОГО ПРОЦЕССА
k = A⋅e(-E/RT)
dCА/dt = -k1CА
dCВ/dt =
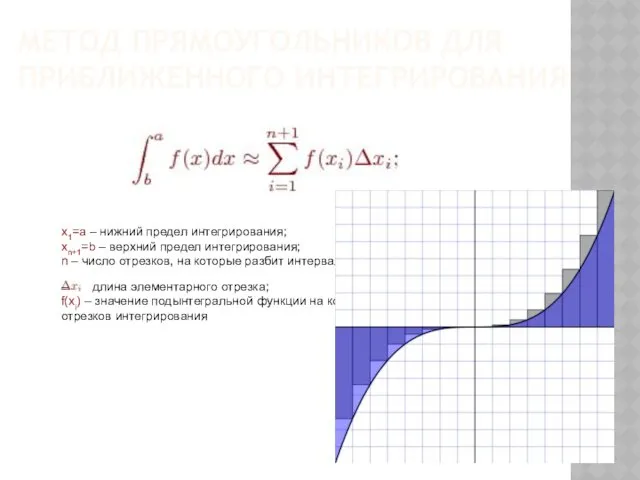
МЕТОД ПРЯМОУГОЛЬНИКОВ ДЛЯ ПРИБЛИЖЕННОГО ИНТЕГРИРОВАНИЯ
x1=a – нижний предел интегрирования;
xn+1=b – верхний предел интегрирования;
n –
МЕТОД ПРЯМОУГОЛЬНИКОВ ДЛЯ ПРИБЛИЖЕННОГО ИНТЕГРИРОВАНИЯ
x1=a – нижний предел интегрирования;
xn+1=b – верхний предел интегрирования;
n –
ЧИСЛЕННЫЕ МЕТОДЫ
Приближенные вычисления
ЧИСЛЕННЫЕ МЕТОДЫ
Приближенные вычисления
ПРИЧИНЫ ПОГРЕШНОСТЕЙ
Несоответствие математической модели изучаемому реальному явлению
Погрешность исходных данных.
Погрешность метода решения
ПРИЧИНЫ ПОГРЕШНОСТЕЙ
Несоответствие математической модели изучаемому реальному явлению
Погрешность исходных данных.
Погрешность метода решения
ПОГРЕШНОСТИ МЕТОДА
погрешность дискретизации
погрешность округления
ПОГРЕШНОСТИ МЕТОДА
погрешность дискретизации
погрешность округления
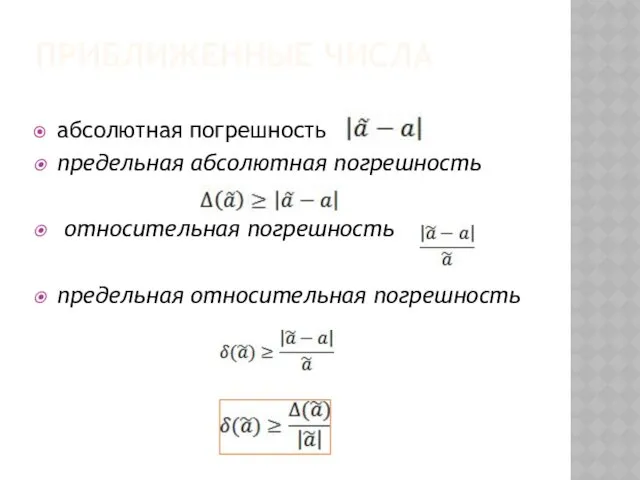
ПРИБЛИЖЕННЫЕ ЧИСЛА
абсолютная погрешность
предельная абсолютная погрешность
относительная погрешность
предельная относительная погрешность
ПРИБЛИЖЕННЫЕ ЧИСЛА
абсолютная погрешность
предельная абсолютная погрешность
относительная погрешность
предельная относительная погрешность
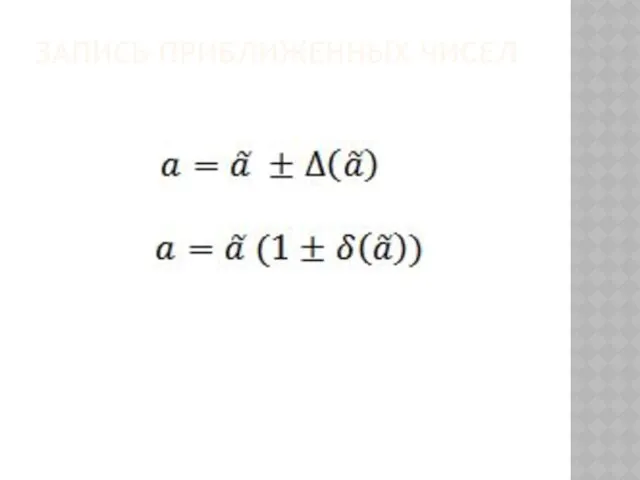
ЗАПИСЬ ПРИБЛИЖЕННЫХ ЧИСЕЛ
ЗАПИСЬ ПРИБЛИЖЕННЫХ ЧИСЕЛ
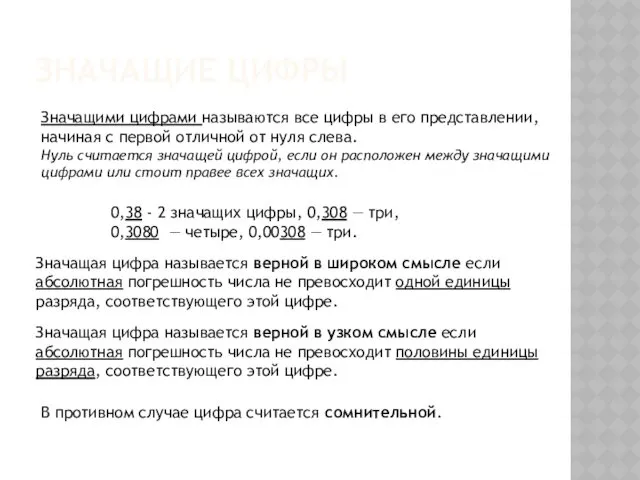
ЗНАЧАЩИЕ ЦИФРЫ
Значащими цифрами называются все цифры в его представлении, начиная с
ЗНАЧАЩИЕ ЦИФРЫ
Значащими цифрами называются все цифры в его представлении, начиная с
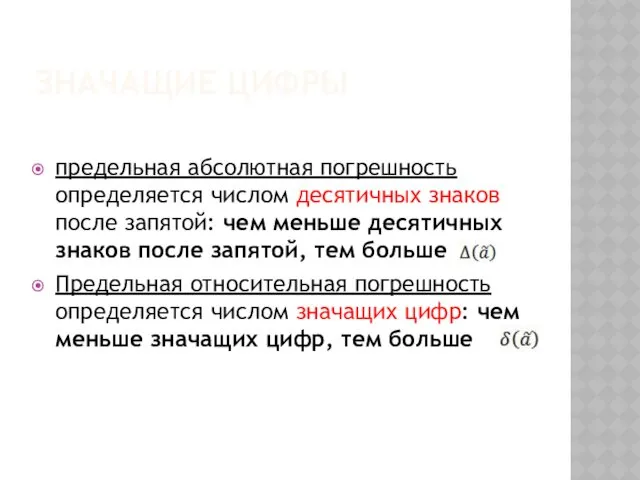
ЗНАЧАЩИЕ ЦИФРЫ
предельная абсолютная погрешность определяется числом десятичных знаков после запятой: чем меньше
ЗНАЧАЩИЕ ЦИФРЫ
предельная абсолютная погрешность определяется числом десятичных знаков после запятой: чем меньше
ОКРУГЛЕНИЕ
Округлением (по дополнению) числа называется запись этого числа с меньшим количеством
ОКРУГЛЕНИЕ
Округлением (по дополнению) числа называется запись этого числа с меньшим количеством
ДЕЙСТВИЯ НАД ПРИБЛИЖЕННЫМИ ЧИСЛАМИ
Предельная абсолютная погрешность алгебраической суммы равна сумме предельных
ДЕЙСТВИЯ НАД ПРИБЛИЖЕННЫМИ ЧИСЛАМИ
Предельная абсолютная погрешность алгебраической суммы равна сумме предельных
ДЕЙСТВИЯ НАД ПРИБЛИЖЕННЫМИ ЧИСЛАМИ
При сложении и вычитании приближённых чисел в результате
ДЕЙСТВИЯ НАД ПРИБЛИЖЕННЫМИ ЧИСЛАМИ
При сложении и вычитании приближённых чисел в результате
ЧИСЛЕННЫЕ МЕТОДЫ
Случайные величины
ЧИСЛЕННЫЕ МЕТОДЫ
Случайные величины
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ СЛУЧАЙНОЙ ВЕЛИЧИНЫ
σ - среднеквадратичное отклонение, f(x) – функция плотности
ЧИСЛЕННЫЕ МЕТОДЫ
методы уточнения приближенных значений уравнений
ЧИСЛЕННЫЕ МЕТОДЫ
методы уточнения приближенных значений уравнений
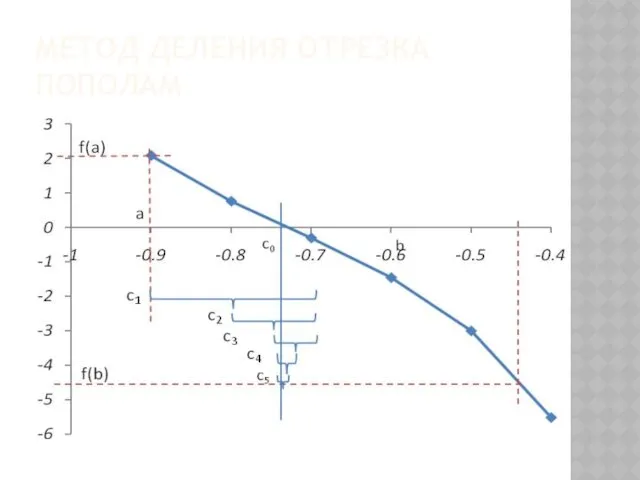
МЕТОД ДЕЛЕНИЯ ОТРЕЗКА ПОПОЛАМ
МЕТОД ДЕЛЕНИЯ ОТРЕЗКА ПОПОЛАМ
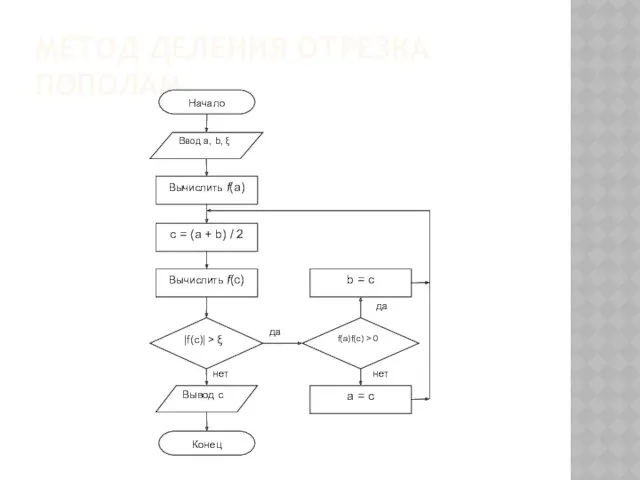
МЕТОД ДЕЛЕНИЯ ОТРЕЗКА ПОПОЛАМ
МЕТОД ДЕЛЕНИЯ ОТРЕЗКА ПОПОЛАМ
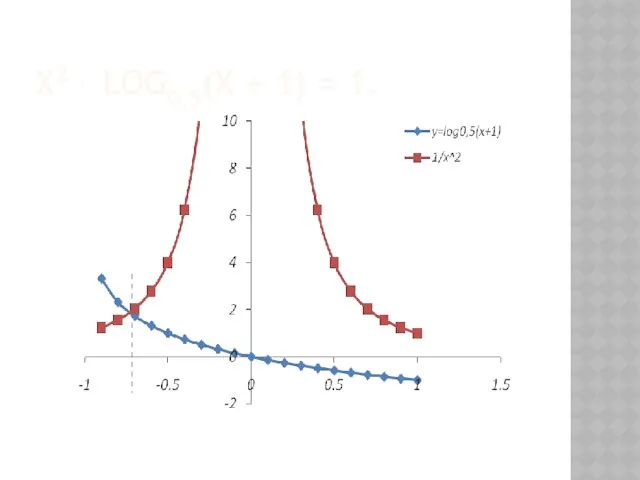
X2 ⋅ LOG0,5(X + 1) = 1.
X2 ⋅ LOG0,5(X + 1) = 1.
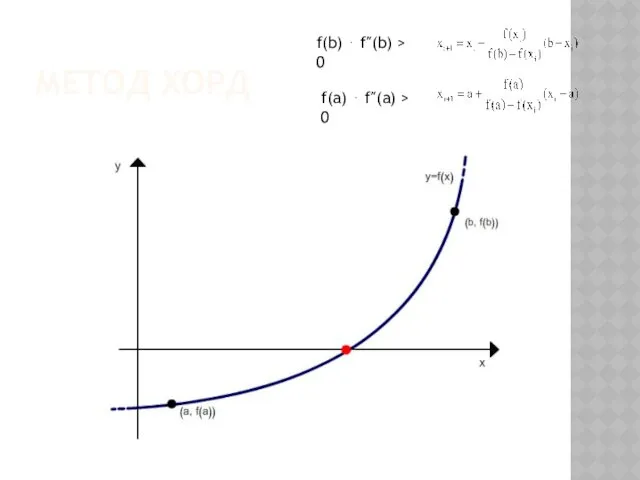
МЕТОД ХОРД
f(b) ⋅ f″(b) > 0
f(a) ⋅ f″(a) > 0
МЕТОД ХОРД
f(b) ⋅ f″(b) > 0
f(a) ⋅ f″(a) > 0
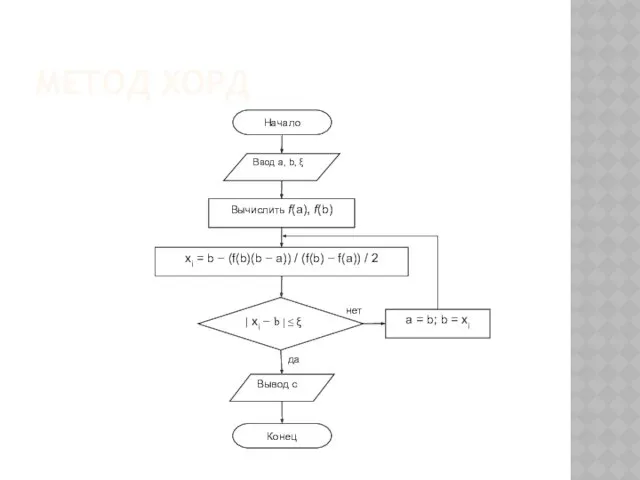
МЕТОД ХОРД
МЕТОД ХОРД
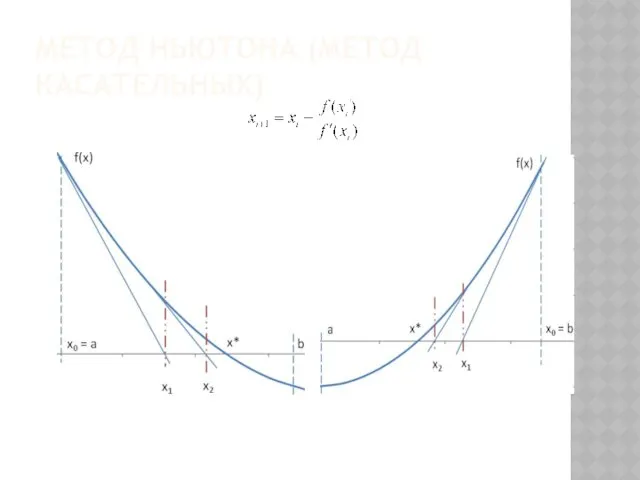
МЕТОД НЬЮТОНА (МЕТОД КАСАТЕЛЬНЫХ)
МЕТОД НЬЮТОНА (МЕТОД КАСАТЕЛЬНЫХ)
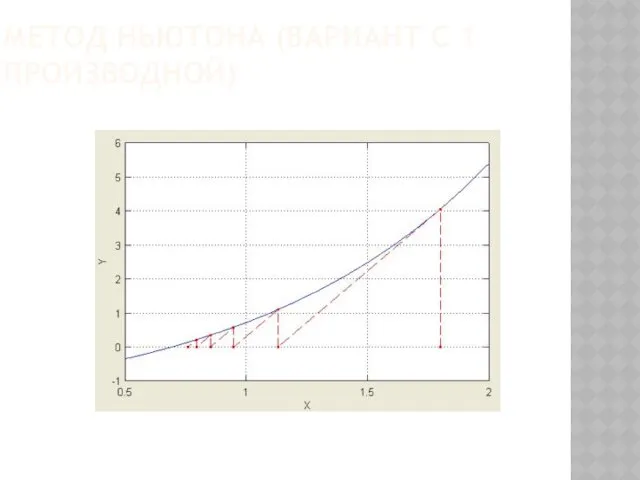
МЕТОД НЬЮТОНА (ВАРИАНТ С 1 ПРОИЗВОДНОЙ)
МЕТОД НЬЮТОНА (ВАРИАНТ С 1 ПРОИЗВОДНОЙ)
![X – SIN(X) = 0,25 [0,982; 1,178]: a = 0,982, b = 1,178](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/44514/slide-51.jpg)
X – SIN(X) = 0,25
[0,982; 1,178]: a = 0,982, b =
X – SIN(X) = 0,25
[0,982; 1,178]: a = 0,982, b =
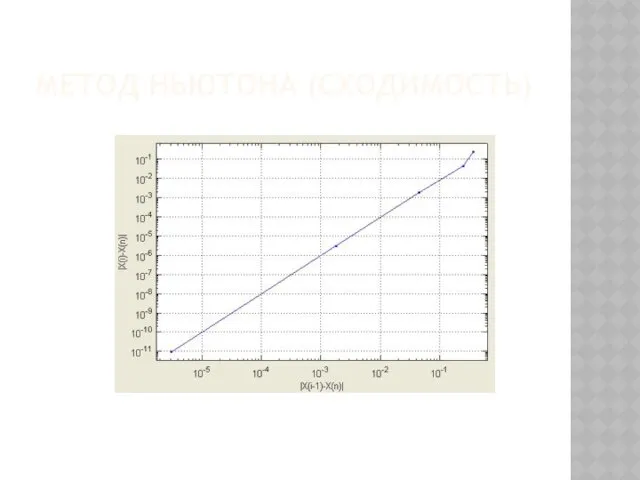
МЕТОД НЬЮТОНА (СХОДИМОСТЬ)
МЕТОД НЬЮТОНА (СХОДИМОСТЬ)
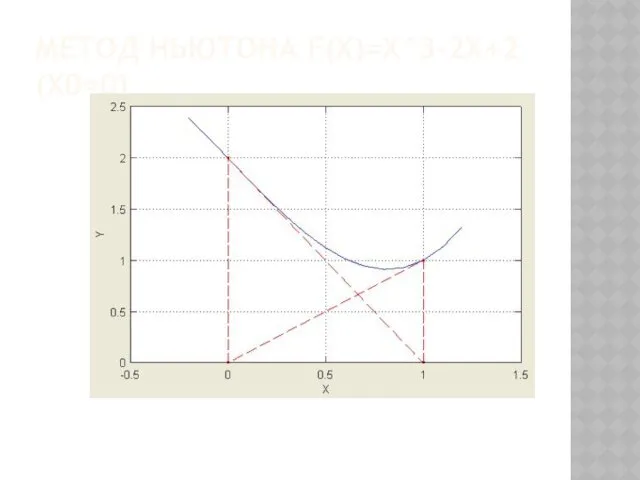
МЕТОД НЬЮТОНА F(X)=X^3-2X+2 (X0=0)
МЕТОД НЬЮТОНА F(X)=X^3-2X+2 (X0=0)
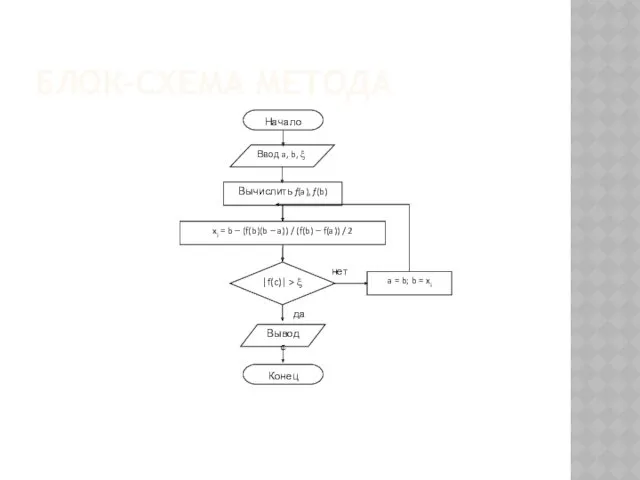
БЛОК-СХЕМА МЕТОДА
БЛОК-СХЕМА МЕТОДА
РЕШЕНИЕ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ
РЕШЕНИЕ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ
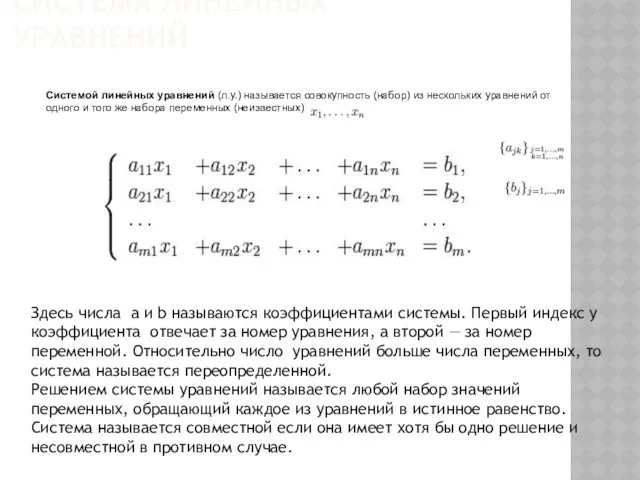
СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
Системой линейных уравнений (л.у.) называется совокупность (набор) из нескольких
СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
Системой линейных уравнений (л.у.) называется совокупность (набор) из нескольких
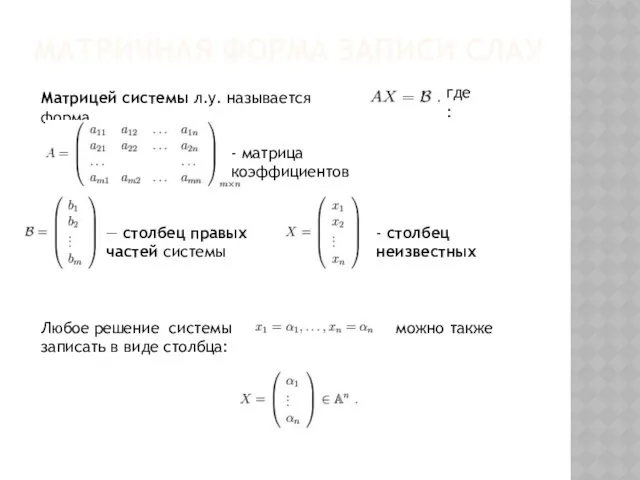
МАТРИЧНАЯ ФОРМА ЗАПИСИ СЛАУ
Матрицей системы л.у. называется форма
где:
- матрица
МАТРИЧНАЯ ФОРМА ЗАПИСИ СЛАУ
Матрицей системы л.у. называется форма
где:
- матрица
МАТРИЧНАЯ ФОРМА ЗАПИСИ СЛАУ
Матрица, составленная из всех коэффициентов системы уравнений, т.е.
МАТРИЧНАЯ ФОРМА ЗАПИСИ СЛАУ
Матрица, составленная из всех коэффициентов системы уравнений, т.е.
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
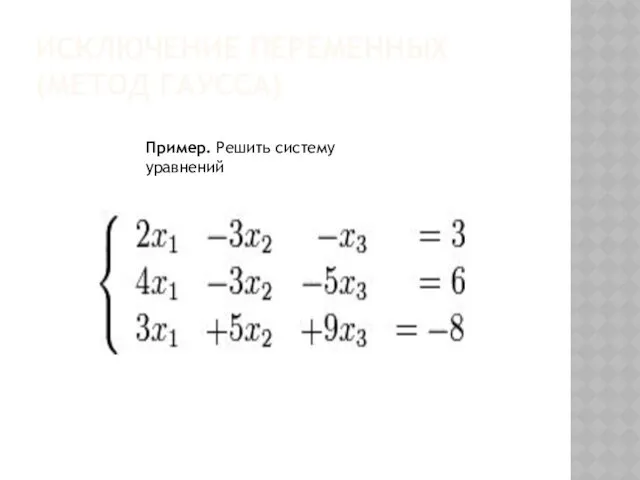
Пример. Решить систему уравнений
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
Пример. Решить систему уравнений
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
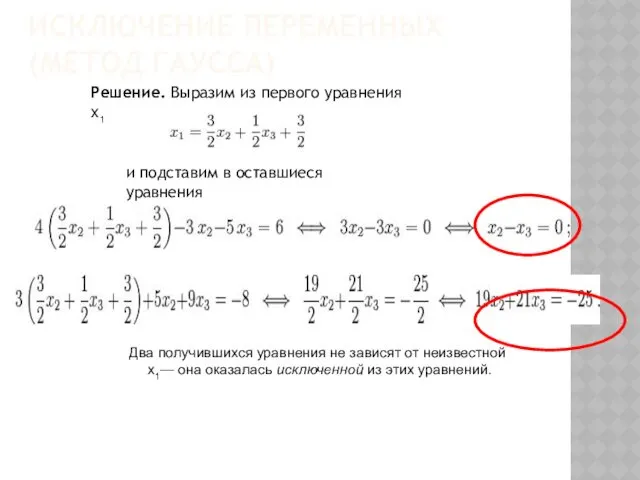
и подставим в оставшиеся уравнения
Решение. Выразим из
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
и подставим в оставшиеся уравнения
Решение. Выразим из
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
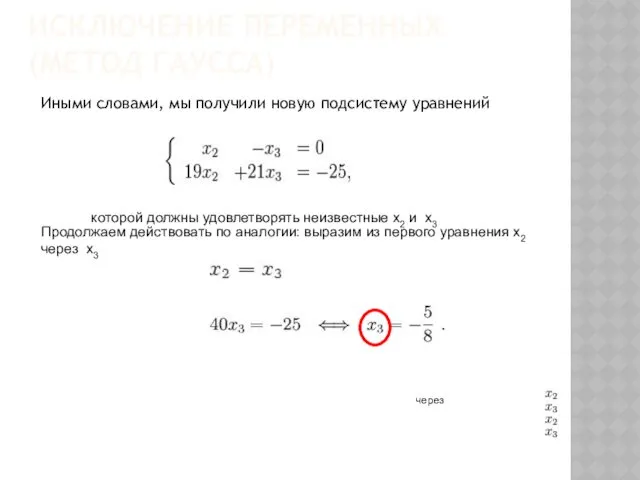
Иными словами, мы получили новую подсистему уравнений
которой
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
Иными словами, мы получили новую подсистему уравнений
которой
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
Итак, значение одной компоненты решения получено. Для нахождения
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
Итак, значение одной компоненты решения получено. Для нахождения
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
Элементарными преобразованиями системы л.у. называются преобразования следующих трех
ИСКЛЮЧЕНИЕ ПЕРЕМЕННЫХ (МЕТОД ГАУССА)
Элементарными преобразованиями системы л.у. называются преобразования следующих трех

МЕТОД ГАУССА
Предположим, что первое уравнение системы содержит явно неизвестную х1 ,
МЕТОД ГАУССА
Предположим, что первое уравнение системы содержит явно неизвестную х1 ,
МЕТОД ГАУССА
В конечном итоге исключаем х1 из всех уравнений кроме первого:
Полученная
МЕТОД ГАУССА
В конечном итоге исключаем х1 из всех уравнений кроме первого:
Полученная
МЕТОД ГАУССА
К этой новой подсистеме можно применить те же рассуждения, что
МЕТОД ГАУССА
К этой новой подсистеме можно применить те же рассуждения, что
МЕТОД ГАУССА
(УСТАНОВЛЕНИЕ МНОЖЕСТВА РЕШЕНИЙ)
Если хотя бы одно из чисел
отлично
МЕТОД ГАУССА
(УСТАНОВЛЕНИЕ МНОЖЕСТВА РЕШЕНИЙ)
Если хотя бы одно из чисел
отлично
ПРИМЕР
Экспериментально установлено, что при определенной постоянной температуре суммарное давление смесей паров
ПРИМЕР
Экспериментально установлено, что при определенной постоянной температуре суммарное давление смесей паров
РЕШЕНИЕ
По закону Дальтона
Получим систему уравнений:
Обозначим:
РЕШЕНИЕ
По закону Дальтона
Получим систему уравнений:
Обозначим:
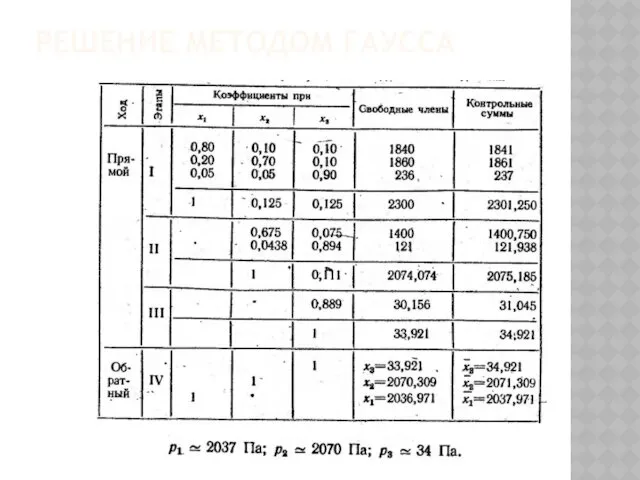
РЕШЕНИЕ МЕТОДОМ ГАУССА
РЕШЕНИЕ МЕТОДОМ ГАУССА
ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ
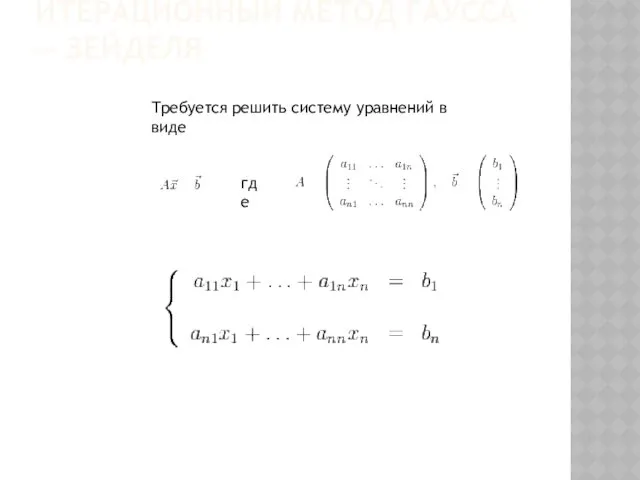
Требуется решить систему уравнений в виде
где
ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ
Требуется решить систему уравнений в виде
где
ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ
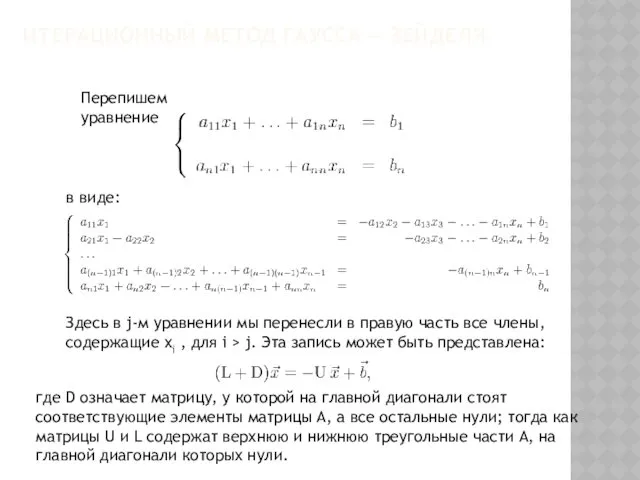
Перепишем уравнение
в виде:
Здесь в j-м уравнении
ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ
Перепишем уравнение
в виде:
Здесь в j-м уравнении
ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ
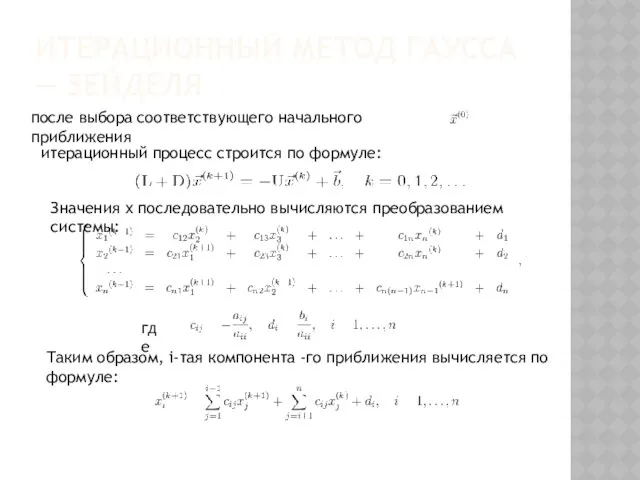
после выбора соответствующего начального приближения
итерационный процесс строится
ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ
после выбора соответствующего начального приближения
итерационный процесс строится
ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ
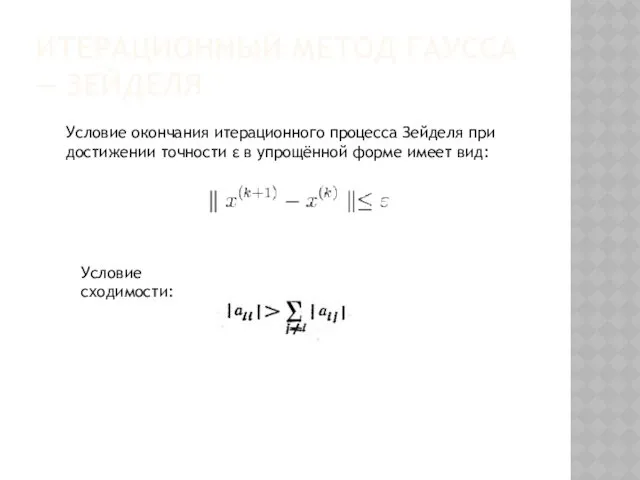
Условие окончания итерационного процесса Зейделя при достижении
ИТЕРАЦИОННЫЙ МЕТОД ГАУССА — ЗЕЙДЕЛЯ
Условие окончания итерационного процесса Зейделя при достижении

ПРИМЕР
Условие сходимости выполняется:
ПРИМЕР
Условие сходимости выполняется:

РЕШЕНИЕ
РЕШЕНИЕ
ЧИСЛЕННЫЕ МЕТОДЫ
Моделирование многомерных нелинейных систем
ЧИСЛЕННЫЕ МЕТОДЫ
Моделирование многомерных нелинейных систем
МОДЕЛИРОВАНИЕ МНОГОМЕРНЫХ НЕЛИНЕЙНЫХ СИСТЕМ
В задачах проектирования и исследования поведения реальных объектов,
МОДЕЛИРОВАНИЕ МНОГОМЕРНЫХ НЕЛИНЕЙНЫХ СИСТЕМ
В задачах проектирования и исследования поведения реальных объектов,
РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
Дана система нелинейных уравнений
или
Необходимо решить эту систему, т.е. найти
РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
Дана система нелинейных уравнений
или
Необходимо решить эту систему, т.е. найти
РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
В отличие от систем линейных уравнений для систем нелинейных
РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
В отличие от систем линейных уравнений для систем нелинейных
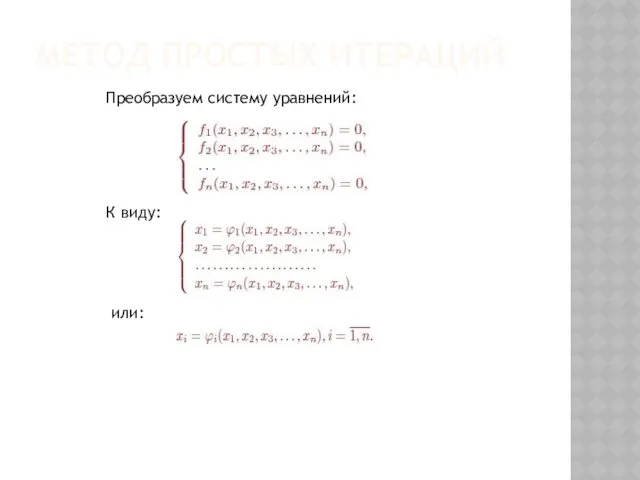
МЕТОД ПРОСТЫХ ИТЕРАЦИЙ
Преобразуем систему уравнений:
К виду:
или:
МЕТОД ПРОСТЫХ ИТЕРАЦИЙ
Преобразуем систему уравнений:
К виду:
или:
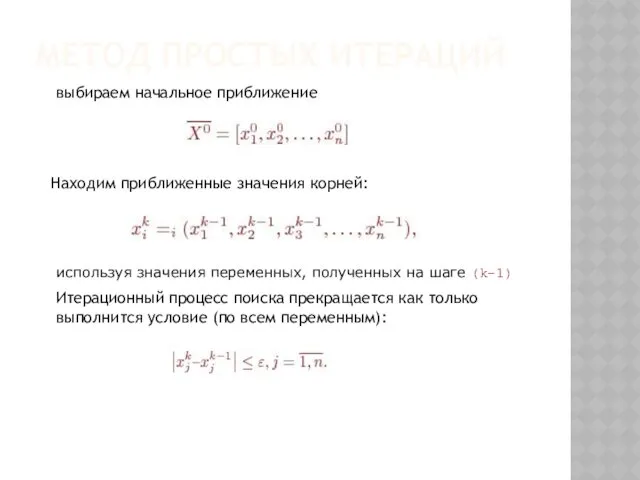
МЕТОД ПРОСТЫХ ИТЕРАЦИЙ
выбираем начальное приближение
Находим приближенные значения корней:
используя значения переменных, полученных
МЕТОД ПРОСТЫХ ИТЕРАЦИЙ
выбираем начальное приближение
Находим приближенные значения корней:
используя значения переменных, полученных
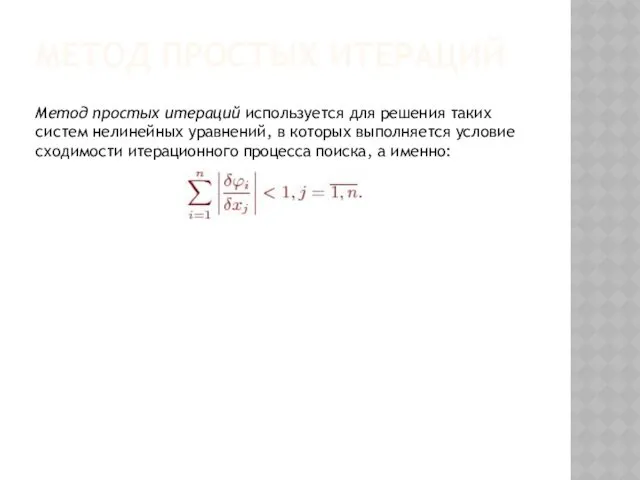
Метод простых итераций используется для решения таких систем нелинейных уравнений, в которых
Метод простых итераций используется для решения таких систем нелинейных уравнений, в которых
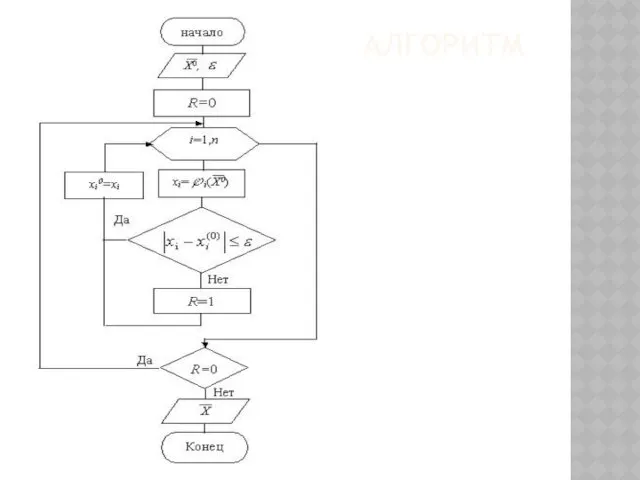
АЛГОРИТМ
АЛГОРИТМ
ПРИМЕР
Дана система нелинейных уравнений:
Необходимо определить область сходимости системы, выбрать начальную точку и найти одно
ПРИМЕР
Дана система нелинейных уравнений:
Необходимо определить область сходимости системы, выбрать начальную точку и найти одно
ПРИМЕР
3. Определяем область сходимости G
4. Выбираем начальную точку
5. Используя выбранную начальную точку решаем заданную
ПРИМЕР
3. Определяем область сходимости G
4. Выбираем начальную точку
5. Используя выбранную начальную точку решаем заданную
РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ МЕТОДОМ НЬЮТОНА
РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ МЕТОДОМ НЬЮТОНА
ЧИСЛЕННЫЕ МЕТОДЫ
Обработка экспериментальных данных
ЧИСЛЕННЫЕ МЕТОДЫ
Обработка экспериментальных данных
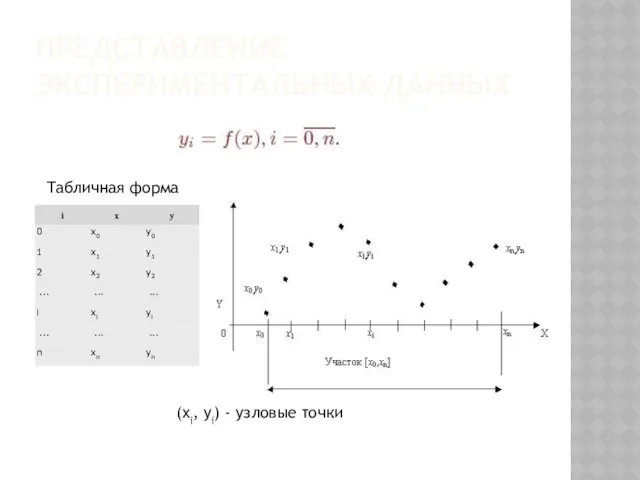
ПРЕДСТАВЛЕНИЕ ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ
Табличная форма
(xi, yi) - узловые точки
ПРЕДСТАВЛЕНИЕ ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ
Табличная форма
(xi, yi) - узловые точки
ИНТЕРПОЛЯЦИЯ
интерполяция – нахождение значения таблично заданной функции в тех точках внутри
ИНТЕРПОЛЯЦИЯ
интерполяция – нахождение значения таблично заданной функции в тех точках внутри
ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОЙ ФУНКЦИИ
выбор интерполяционной функции ϕ(х);
оценка погрешности R(x);
размещение узлов интерполяции для
ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОЙ ФУНКЦИИ
выбор интерполяционной функции ϕ(х);
оценка погрешности R(x);
размещение узлов интерполяции для
ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОЙ ФУНКЦИИ
Задача решается при помощи нахождения аналитического выражения некоторой вспомогательной
ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОЙ ФУНКЦИИ
Задача решается при помощи нахождения аналитического выражения некоторой вспомогательной
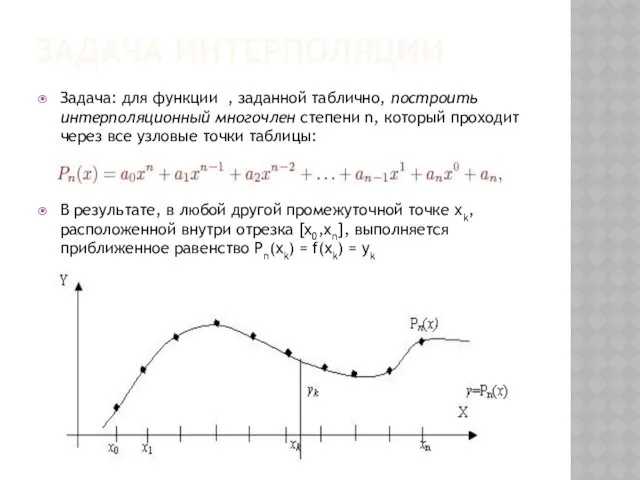
ЗАДАЧА ИНТЕРПОЛЯЦИИ
Задача: для функции , заданной таблично, построить интерполяционный многочлен степени n, который проходит
ЗАДАЧА ИНТЕРПОЛЯЦИИ
Задача: для функции , заданной таблично, построить интерполяционный многочлен степени n, который проходит
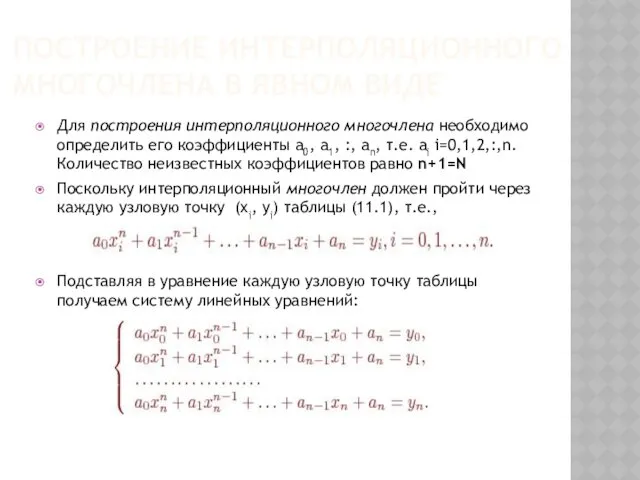
ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОГО МНОГОЧЛЕНА В ЯВНОМ ВИДЕ
Для построения интерполяционного многочлена необходимо определить его коэффициенты a0,
ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОГО МНОГОЧЛЕНА В ЯВНОМ ВИДЕ
Для построения интерполяционного многочлена необходимо определить его коэффициенты a0,
ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОГО МНОГОЧЛЕНА В ЯВНОМ ВИДЕ
Неизвестными системы уравнений являются a0, a1, a2,
ПОСТРОЕНИЕ ИНТЕРПОЛЯЦИОННОГО МНОГОЧЛЕНА В ЯВНОМ ВИДЕ
Неизвестными системы уравнений являются a0, a1, a2,
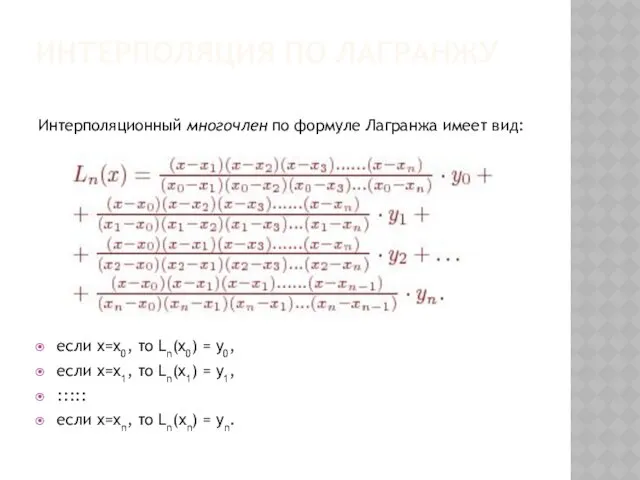
ИНТЕРПОЛЯЦИЯ ПО ЛАГРАНЖУ
Интерполяционный многочлен по формуле Лагранжа имеет вид:
если x=x0, то Ln(x0) = y0,
если x=x1, то Ln(x1)
ИНТЕРПОЛЯЦИЯ ПО ЛАГРАНЖУ
Интерполяционный многочлен по формуле Лагранжа имеет вид:
если x=x0, то Ln(x0) = y0,
если x=x1, то Ln(x1)
ИНТЕРПОЛЯЦИЯ ПО ЛАГРАНЖУ
интерполяционный многочлен Лагранжа приближает заданную табличную функцию, т.е. Ln(xi) = yi и используется
ИНТЕРПОЛЯЦИЯ ПО ЛАГРАНЖУ
интерполяционный многочлен Лагранжа приближает заданную табличную функцию, т.е. Ln(xi) = yi и используется
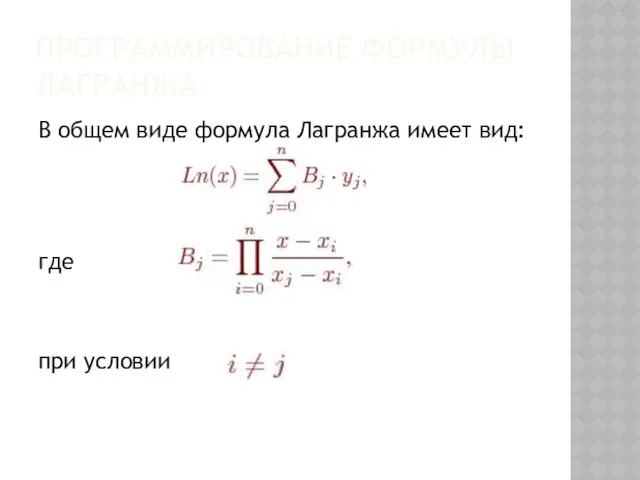
ПРОГРАММИРОВАНИЕ ФОРМУЛЫ ЛАГРАНЖА
В общем виде формула Лагранжа имеет вид:
где
при условии
ПРОГРАММИРОВАНИЕ ФОРМУЛЫ ЛАГРАНЖА
В общем виде формула Лагранжа имеет вид:
где
при условии
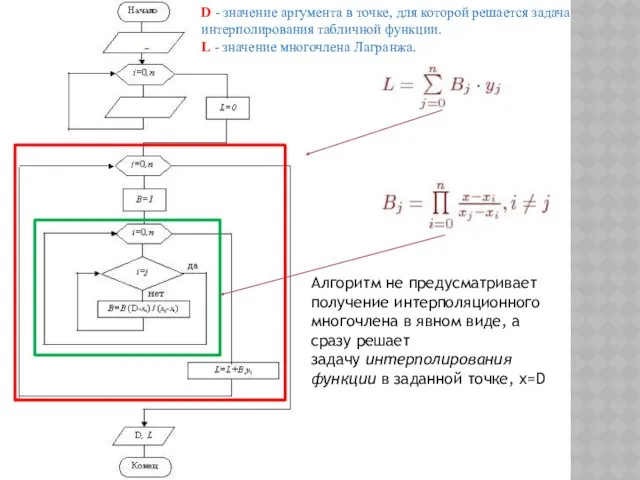
Алгоритм не предусматривает получение интерполяционного многочлена в явном виде, а сразу решает
Алгоритм не предусматривает получение интерполяционного многочлена в явном виде, а сразу решает
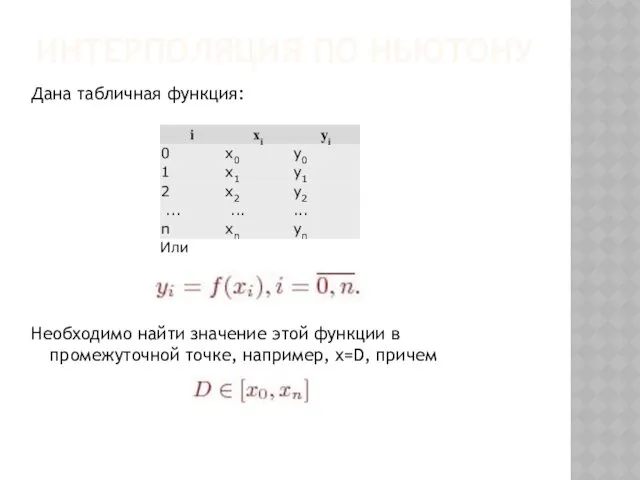
ИНТЕРПОЛЯЦИЯ ПО НЬЮТОНУ
Дана табличная функция:
Необходимо найти значение этой функции в промежуточной
ИНТЕРПОЛЯЦИЯ ПО НЬЮТОНУ
Дана табличная функция:
Необходимо найти значение этой функции в промежуточной
Интерполяционный многочлен по формуле Ньютона имеет вид:
где
- разделенные разности 0-го, 1-го, 2-го,:., n-го
Интерполяционный многочлен по формуле Ньютона имеет вид:
где
- разделенные разности 0-го, 1-го, 2-го,:., n-го
РАЗДЕЛЕННЫЕ РАЗНОСТИ
Значения f(x0), f(x1), : , f(xn), т.е. значения табличной функции в узлах,
РАЗДЕЛЕННЫЕ РАЗНОСТИ
Значения f(x0), f(x1), : , f(xn), т.е. значения табличной функции в узлах,
РАЗДЕЛЕННЫЕ РАЗНОСТИ
разделенная разность k -го порядка на участке [xi, xi+k] может быть определена через разделенные разности (k-1) -го
РАЗДЕЛЕННЫЕ РАЗНОСТИ
разделенная разность k -го порядка на участке [xi, xi+k] может быть определена через разделенные разности (k-1) -го
ПРОГРАММИРОВАНИЕ ФОРМУЛЫ НЬЮТОНА
Пусть нужно найти значение таблично заданной функции в точке
ПРОГРАММИРОВАНИЕ ФОРМУЛЫ НЬЮТОНА
Пусть нужно найти значение таблично заданной функции в точке
ПРОГРАММИРОВАНИЕ ФОРМУЛЫ НЬЮТОНА
ПРОГРАММИРОВАНИЕ ФОРМУЛЫ НЬЮТОНА
ПРОГРАММИРОВАНИЕ ФОРМУЛЫ НЬЮТОНА
Для вычисления Р используется рекуррентная формула
P = P(x - xk-1) внутри
ПРОГРАММИРОВАНИЕ ФОРМУЛЫ НЬЮТОНА
Для вычисления Р используется рекуррентная формула P = P(x - xk-1) внутри
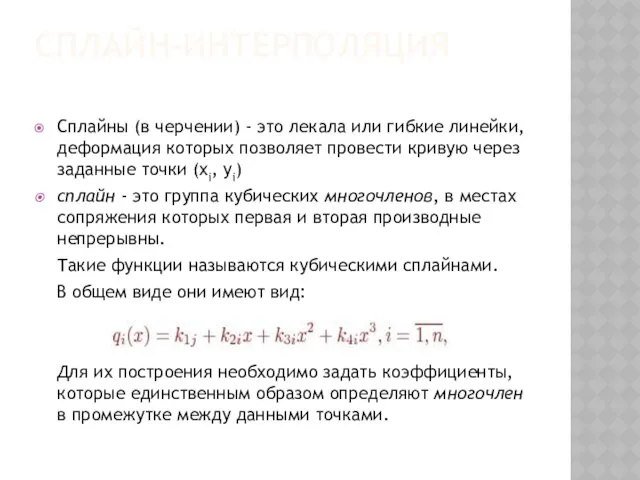
СПЛАЙН-ИНТЕРПОЛЯЦИЯ
Сплайны (в черчении) - это лекала или гибкие линейки, деформация которых
СПЛАЙН-ИНТЕРПОЛЯЦИЯ
Сплайны (в черчении) - это лекала или гибкие линейки, деформация которых
СПЛАЙН-ИНТЕРПОЛЯЦИЯ
Для интерполяции данной функции необходимо задать все кубические функции
q1(x), q2(x), :qn(x).
Количество
СПЛАЙН-ИНТЕРПОЛЯЦИЯ
Для интерполяции данной функции необходимо задать все кубические функции
q1(x), q2(x), :qn(x).
Количество
СПЛАЙН-ИНТЕРПОЛЯЦИЯ
сплайны должны соприкасаться в заданных точках (2n уравнений)
в местах соприкосновения сплайнов
СПЛАЙН-ИНТЕРПОЛЯЦИЯ
сплайны должны соприкасаться в заданных точках (2n уравнений)
в местах соприкосновения сплайнов
АППРОКСИМАЦИЯ
ОПЫТНЫХ ДАННЫХ
Дана табличная функция:
Задача аппроксимации заключается в отыскании аналитической зависимости y=f(x)
АППРОКСИМАЦИЯ
ОПЫТНЫХ ДАННЫХ
Дана табличная функция:
Задача аппроксимации заключается в отыскании аналитической зависимости y=f(x)
СПОСОБЫ АППРОКСИМАЦИИ
1. Аппроксимирующая кривая F(x), аналитический вид которой необходимо найти, проходила через все
СПОСОБЫ АППРОКСИМАЦИИ
1. Аппроксимирующая кривая F(x), аналитический вид которой необходимо найти, проходила через все
СГЛАЖИВАНИЕ ДАННЫХ МЕТОДОМ НАИМЕНЬШИХ КВАДРАТОВ
Аппроксимирующая кривая F(x) должна проходить так, чтобы ее отклонения
СГЛАЖИВАНИЕ ДАННЫХ МЕТОДОМ НАИМЕНЬШИХ КВАДРАТОВ
Аппроксимирующая кривая F(x) должна проходить так, чтобы ее отклонения
МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
Пусть искомая функция F(x) будет иметь вид :
степень m не зависит
МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
Пусть искомая функция F(x) будет иметь вид :
степень m не зависит
МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
Необходимым условием существования минимума функции S является равенство нулю
МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
Необходимым условием существования минимума функции S является равенство нулю
МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
Порядок системы равен m+1
МЕТОД НАИМЕНЬШИХ КВАДРАТОВ
Порядок системы равен m+1
ПРОГРАММИРОВАНИЕ МЕТОДА НАИМЕНЬШИХ КВАДРАТОВ (МНК)
Преобразуем систему индексации в системе уравнений:
- неизвестные системы
ПРОГРАММИРОВАНИЕ МЕТОДА НАИМЕНЬШИХ КВАДРАТОВ (МНК)
Преобразуем систему индексации в системе уравнений:
- неизвестные системы
АЛГОРИТМ
АЛГОРИТМ
АЛГОРИТМ
АЛГОРИТМ
АЛГОРИТМ
АЛГОРИТМ
ЧИСЛЕННЫЕ МЕТОДЫ
Интегрирование
ЧИСЛЕННЫЕ МЕТОДЫ
Интегрирование
Динамические системы - это системы, в которых входные переменные являются функциями от
Динамические системы - это системы, в которых входные переменные являются функциями от

ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
дана функция y=f(x). Найти интеграл этой функции на участке [a,b], т.е.
ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
дана функция y=f(x). Найти интеграл этой функции на участке [a,b], т.е.
Численные методы интегрирования применяются в следующих случаях:
подынтегральная функция f(x) задана таблично на участке [a,b] ;
подынтегральная
Численные методы интегрирования применяются в следующих случаях:
подынтегральная функция f(x) задана таблично на участке [a,b] ;
подынтегральная
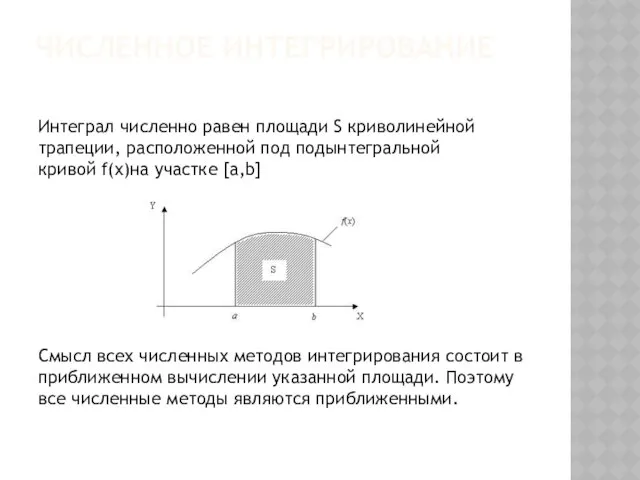
Интеграл численно равен площади S криволинейной трапеции, расположенной под подынтегральной кривой f(x)на
Интеграл численно равен площади S криволинейной трапеции, расположенной под подынтегральной кривой f(x)на
При вычислении интеграла подынтегральная функция f(x) аппроксимируется интерполяционным многочленом.
Порядок вычисления интеграла численными методами:
Весь
При вычислении интеграла подынтегральная функция f(x) аппроксимируется интерполяционным многочленом.
Порядок вычисления интеграла численными методами:
Весь
ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
Нахождение приближенного значения интеграла называется квадратурой, а формулы для
ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
Нахождение приближенного значения интеграла называется квадратурой, а формулы для
![ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ Если в каждой из частей деления интервала [a,b]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/44514/slide-127.jpg)
ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
Если в каждой из частей деления интервала [a,b] подынтегральная
ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
Если в каждой из частей деления интервала [a,b] подынтегральная
![МЕТОД ПРЯМОУГОЛЬНИКОВ Весь участок [a,b] делим на n равных частей](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/44514/slide-128.jpg)
МЕТОД ПРЯМОУГОЛЬНИКОВ
Весь участок [a,b] делим на n равных частей с шагом h=(b-a)/n.
Определяем значение yi подынтегральной функции f(x) в
МЕТОД ПРЯМОУГОЛЬНИКОВ
Весь участок [a,b] делим на n равных частей с шагом h=(b-a)/n.
Определяем значение yi подынтегральной функции f(x) в
МЕТОД ПРЯМОУГОЛЬНИКОВ
Если высота каждого частичного прямоугольника равна значению подынтегральной функции в
МЕТОД ПРЯМОУГОЛЬНИКОВ
Если высота каждого частичного прямоугольника равна значению подынтегральной функции в
МЕТОД ПРЯМОУГОЛЬНИКОВ
Если высота каждого частичного прямоугольника равна значению подынтегральной функции в
МЕТОД ПРЯМОУГОЛЬНИКОВ
Если высота каждого частичного прямоугольника равна значению подынтегральной функции в
АЛГОРИТМ
(с автоматическим определением
шага по оси х)
АЛГОРИТМ
(с автоматическим определением
шага по оси х)
![Интервал [a,b] делим на n равных частей с шагом h=(b-a)/n.](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/44514/slide-132.jpg)
Интервал [a,b] делим на n равных частей с шагом h=(b-a)/n.
Вычисляем значение подынтегральной функции в
Интервал [a,b] делим на n равных частей с шагом h=(b-a)/n.
Вычисляем значение подынтегральной функции в
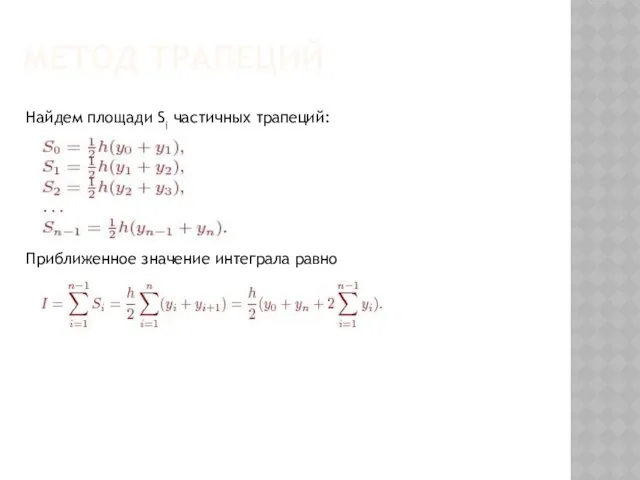
Найдем площади Si частичных трапеций:
МЕТОД ТРАПЕЦИЙ
Приближенное значение интеграла равно
Найдем площади Si частичных трапеций:
МЕТОД ТРАПЕЦИЙ
Приближенное значение интеграла равно
МЕТОД СИМПСОНА
подынтегральная функция аппроксимируется квадратичной параболой a0x2+a1x+a2.
Для построения квадратичной параболы необходимо иметь
МЕТОД СИМПСОНА
подынтегральная функция аппроксимируется квадратичной параболой a0x2+a1x+a2.
Для построения квадратичной параболы необходимо иметь

МЕТОД СИМПСОНА
На основании этого условия строим систему линейных уравнений:
Решая эту систему,
МЕТОД СИМПСОНА
На основании этого условия строим систему линейных уравнений:
Решая эту систему,
![МЕТОД СИМПСОНА В результате имеем: Для участка [x2, x4]: Суммируя](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/44514/slide-136.jpg)
МЕТОД СИМПСОНА
В результате имеем:
Для участка [x2, x4]:
Суммируя все площади S1 под квадратичными параболами, получим квадратурную
МЕТОД СИМПСОНА
В результате имеем:
Для участка [x2, x4]:
Суммируя все площади S1 под квадратичными параболами, получим квадратурную
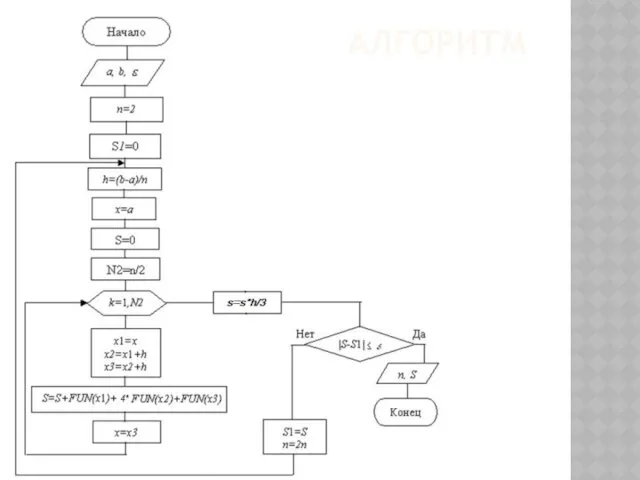
АЛГОРИТМ
АЛГОРИТМ
ЧИСЛЕННЫЕ МЕТОДЫ
Дифференцирование
ЧИСЛЕННЫЕ МЕТОДЫ
Дифференцирование
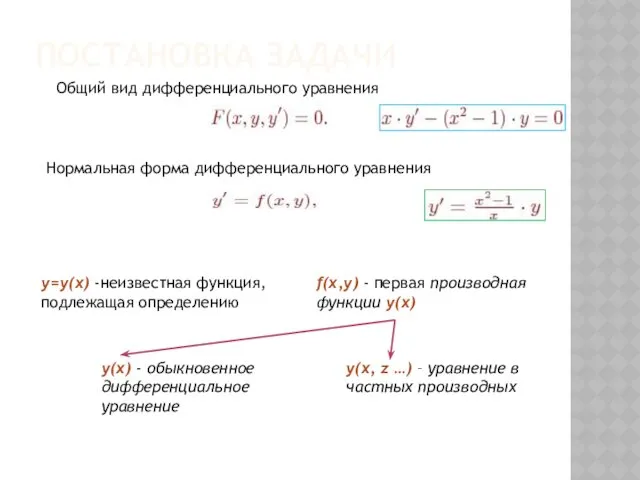
ПОСТАНОВКА ЗАДАЧИ
Нормальная форма дифференциального уравнения
y=y(x) -неизвестная функция, подлежащая определению
f(x,y) - первая производная функции y(x)
Общий вид
ПОСТАНОВКА ЗАДАЧИ
Нормальная форма дифференциального уравнения
y=y(x) -неизвестная функция, подлежащая определению
f(x,y) - первая производная функции y(x)
Общий вид
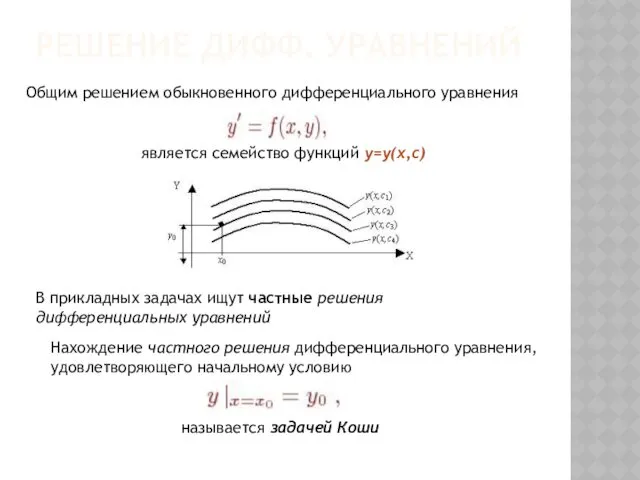
РЕШЕНИЕ ДИФФ. УРАВНЕНИЙ
Общим решением обыкновенного дифференциального уравнения
является семейство функций у=у(х,с)
В прикладных
РЕШЕНИЕ ДИФФ. УРАВНЕНИЙ
Общим решением обыкновенного дифференциального уравнения
является семейство функций у=у(х,с)
В прикладных
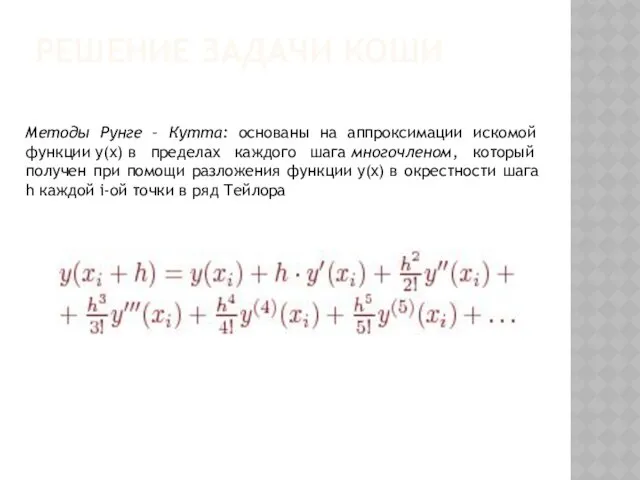
РЕШЕНИЕ ЗАДАЧИ КОШИ
Методы Рунге – Кутта: основаны на аппроксимации искомой функции у(х) в
РЕШЕНИЕ ЗАДАЧИ КОШИ
Методы Рунге – Кутта: основаны на аппроксимации искомой функции у(х) в
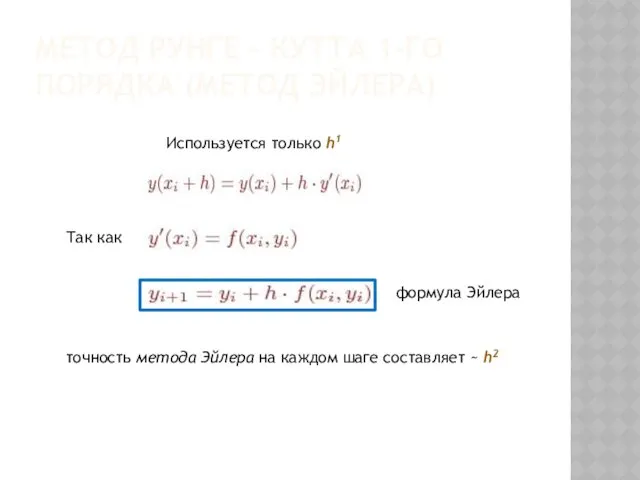
МЕТОД РУНГЕ - КУТТА 1-ГО ПОРЯДКА (МЕТОД ЭЙЛЕРА)
Используется только h1
Так как
точность метода
МЕТОД РУНГЕ - КУТТА 1-ГО ПОРЯДКА (МЕТОД ЭЙЛЕРА)
Используется только h1
Так как
точность метода
АЛГОРИТМ
(x,y) -начальная точка
h -шаг интегрирования дифференциального уравнения,
b -конец интервала интегрирования
(x,y) - текущие значения табличной
АЛГОРИТМ
(x,y) -начальная точка
h -шаг интегрирования дифференциального уравнения,
b -конец интервала интегрирования
(x,y) - текущие значения табличной
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ МЕТОДА ЭЙЛЕРА
Формула Эйлера:
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ МЕТОДА ЭЙЛЕРА
Формула Эйлера:
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ МЕТОДА ЭЙЛЕРА
Недостаток: наклон касательной в пределах каждого шага считается
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ МЕТОДА ЭЙЛЕРА
Недостаток: наклон касательной в пределах каждого шага считается
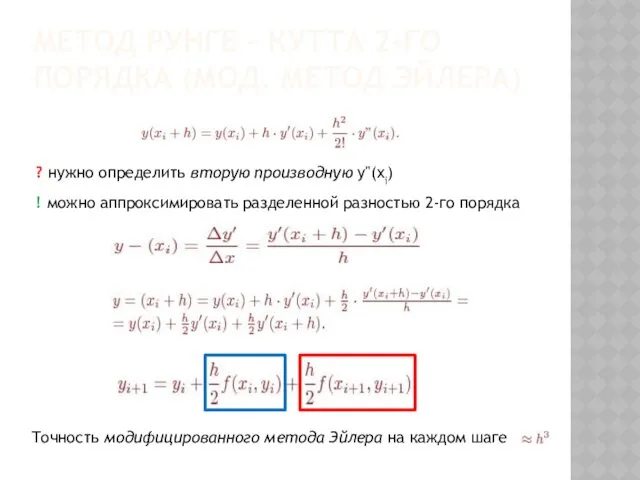
МЕТОД РУНГЕ - КУТТА 2-ГО ПОРЯДКА (МОД. МЕТОД ЭЙЛЕРА)
? нужно определить вторую
МЕТОД РУНГЕ - КУТТА 2-ГО ПОРЯДКА (МОД. МЕТОД ЭЙЛЕРА)
? нужно определить вторую
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ МЕТОДА
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ МЕТОДА
АЛГОРИТМ
АЛГОРИТМ
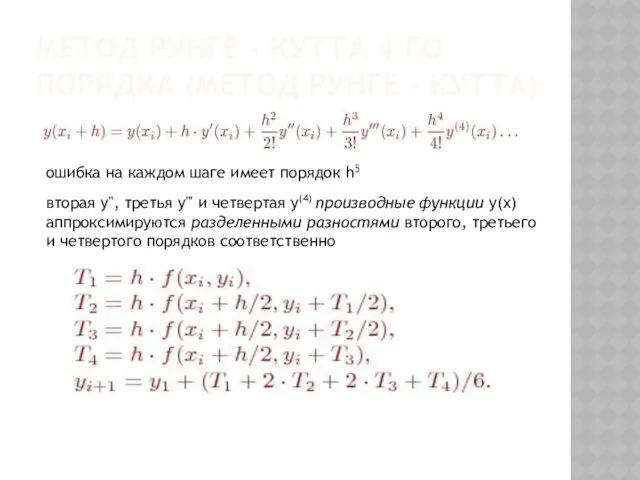
МЕТОД РУНГЕ - КУТТА 4-ГО ПОРЯДКА (МЕТОД РУНГЕ - КУТТА)
ошибка на
МЕТОД РУНГЕ - КУТТА 4-ГО ПОРЯДКА (МЕТОД РУНГЕ - КУТТА)
ошибка на
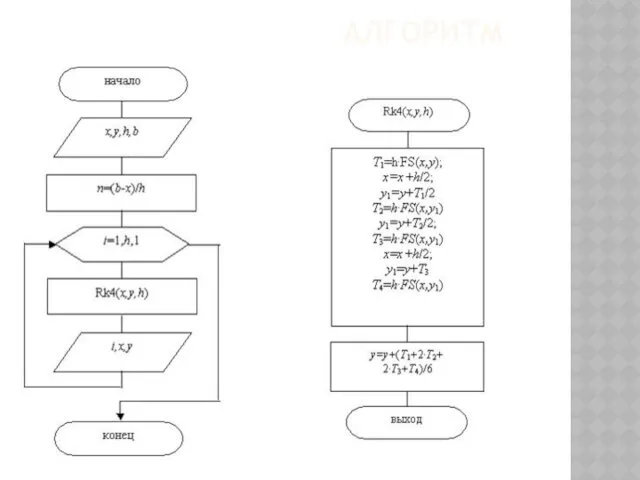
АЛГОРИТМ
АЛГОРИТМ
РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ВТОРОГО ПОРЯДКА
РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ВТОРОГО ПОРЯДКА
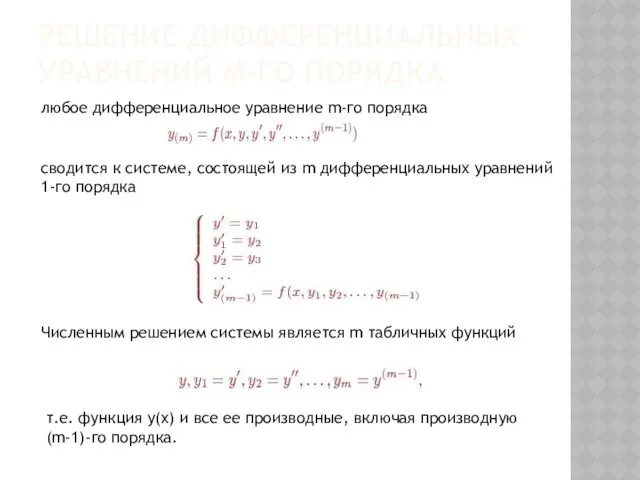
РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ M-ГО ПОРЯДКА
любое дифференциальное уравнение m-го порядка
сводится к системе,
РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ M-ГО ПОРЯДКА
любое дифференциальное уравнение m-го порядка
сводится к системе,
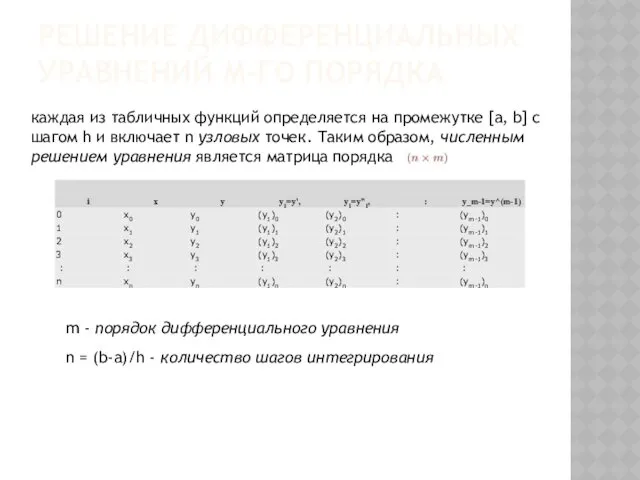
РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ M-ГО ПОРЯДКА
каждая из табличных функций определяется на промежутке [a,
РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ M-ГО ПОРЯДКА
каждая из табличных функций определяется на промежутке [a,
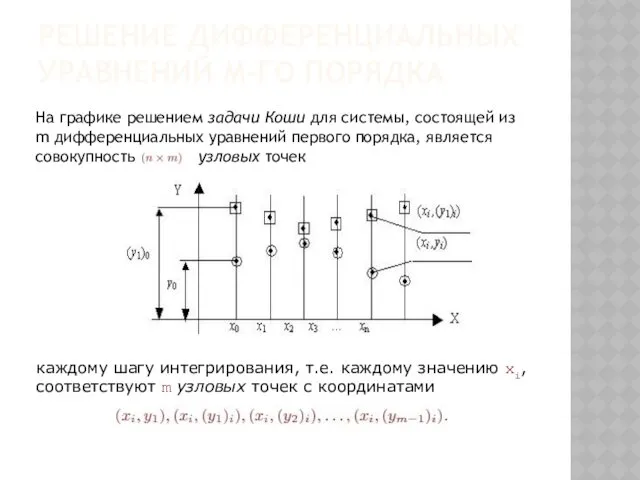
РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ M-ГО ПОРЯДКА
каждому шагу интегрирования, т.е. каждому значению xi, соответствуют m узловых точек
РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ M-ГО ПОРЯДКА
каждому шагу интегрирования, т.е. каждому значению xi, соответствуют m узловых точек
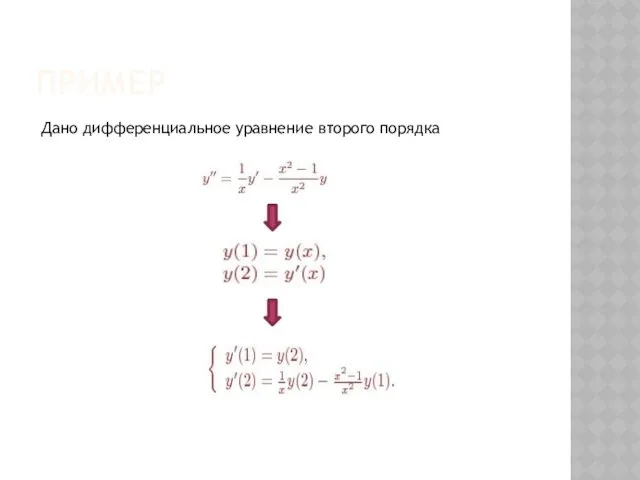
ПРИМЕР
Дано дифференциальное уравнение второго порядка
ПРИМЕР
Дано дифференциальное уравнение второго порядка
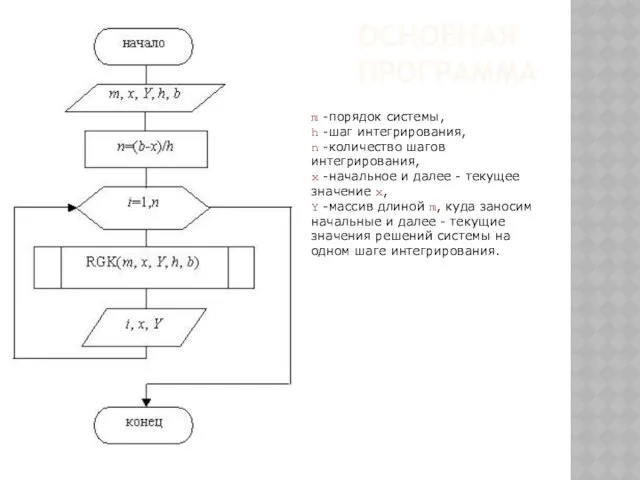
ОСНОВНАЯ ПРОГРАММА
m -порядок системы,
h -шаг интегрирования,
n -количество шагов интегрирования,
x -начальное и далее - текущее значение x,
Y -массив
ОСНОВНАЯ ПРОГРАММА
m -порядок системы,
h -шаг интегрирования,
n -количество шагов интегрирования,
x -начальное и далее - текущее значение x,
Y -массив
 Презентация к конспекту Прекрасные бабочки - Цикламены
Презентация к конспекту Прекрасные бабочки - Цикламены Учет и аудит наличия, движения и использования материально-производственных запасов в СПК (колхоз) имени Куйбышева Кинельского района
Учет и аудит наличия, движения и использования материально-производственных запасов в СПК (колхоз) имени Куйбышева Кинельского района White and red? if you mix blue and red …
White and red? if you mix blue and red … Отопление зданий
Отопление зданий Презентация Сколько весит здоровье ученика
Презентация Сколько весит здоровье ученика История Древнего Египта
История Древнего Египта Объём прямоугольного параллелепипеда
Объём прямоугольного параллелепипеда Презентация программы дополнительного образования детей 1 класса
Презентация программы дополнительного образования детей 1 класса Цирроз печени
Цирроз печени Физминутка Герои диснея
Физминутка Герои диснея Классификация строительных машин
Классификация строительных машин Клинические синдромы в пульмонологии
Клинические синдромы в пульмонологии Влияние различных фракций гумуса на рост и развитие Avena Sativa L
Влияние различных фракций гумуса на рост и развитие Avena Sativa L Размеры Окон Сергиев Посад финал
Размеры Окон Сергиев Посад финал Однофазные АД. Синхронные машины. Машины постоянного тока
Однофазные АД. Синхронные машины. Машины постоянного тока Презентация к занятию по риторике № 2. Чему учит наука риторика
Презентация к занятию по риторике № 2. Чему учит наука риторика Покров Пресвятой Богородицы. Народные приметы
Покров Пресвятой Богородицы. Народные приметы Школьный этап Я - лидер
Школьный этап Я - лидер Этикет в Древней Руси
Этикет в Древней Руси Определение областей разрушения горной породы и осевых нагрузок на долота
Определение областей разрушения горной породы и осевых нагрузок на долота Портфолио классного руководителя.
Портфолио классного руководителя. History of the Koenigsegg company
History of the Koenigsegg company Формы и их элементы управления в редакторе Visual Basic
Формы и их элементы управления в редакторе Visual Basic Война за независимость. Образование США
Война за независимость. Образование США СРЕДА
СРЕДА Особенности строительства и преимущества деревянных домов
Особенности строительства и преимущества деревянных домов Звонкие парные согласные на конце и в середине слова
Звонкие парные согласные на конце и в середине слова Понятийный аппарат научного исследования, его содержание и характеристика
Понятийный аппарат научного исследования, его содержание и характеристика