- Механическая и кинетическая энергии

Содержание
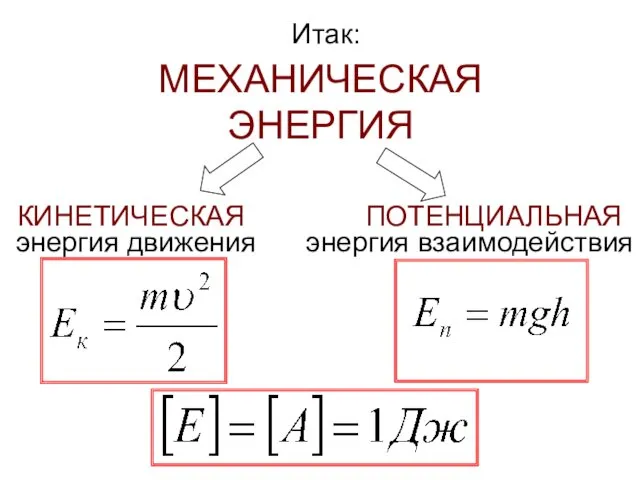
- 2. МЕХАНИЧЕСКАЯ ЭНЕРГИЯ КИНЕТИЧЕСКАЯ ПОТЕНЦИАЛЬНАЯ энергия движения энергия взаимодействия Так как в механике изучается движение тел и
- 3. Потенциальная энергия – это энергия которой обладают предметы в состоянии покоя. Кинетическая энергия – это энергия
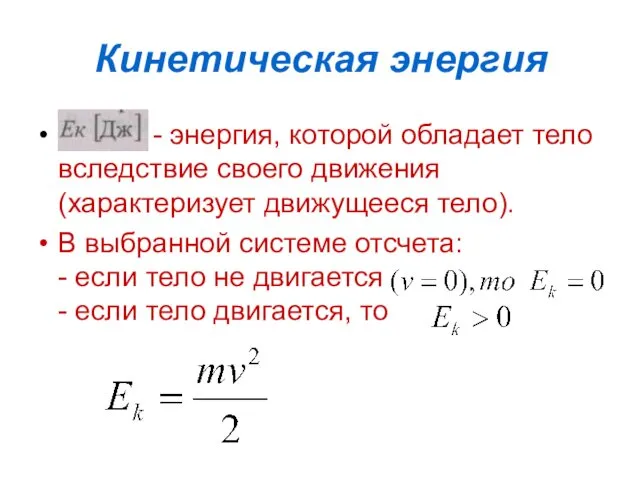
- 4. Кинетическая энергия - энергия, которой обладает тело вследствие своего движения (характеризует движущееся тело). В выбранной системе
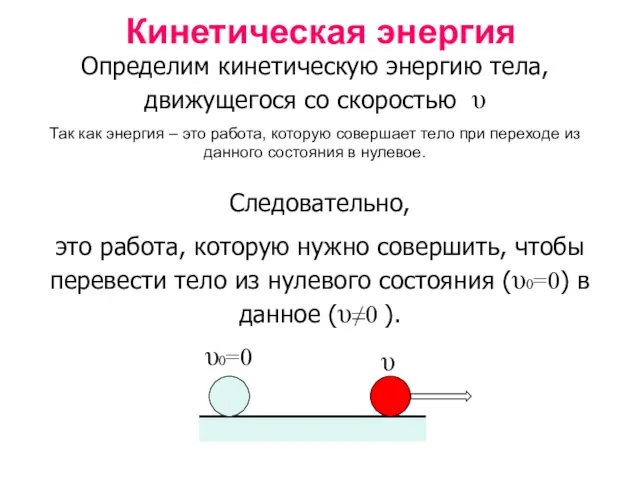
- 5. Кинетическая энергия Следовательно, это работа, которую нужно совершить, чтобы перевести тело из нулевого состояния (υ0=0) в
- 6. Определим эту работу: υ υ0=0 S Чтобы тело изменило скорость к нему необходимо приложить силу F,
- 7. Преобразуем это выражение: υ υ0=0 S Согласно II закону Ньютона: Путь при равноускоренном движении: F ,
- 8. Преобразуем это выражение: υ υ0=0 S Согласно IIзакону Ньютона: Путь при равноускоренном движении: F , подставим
- 9. υ υ0=0 S F Кинетическая энергия движущегося тела равна половине произведения массы тела на квадрат его
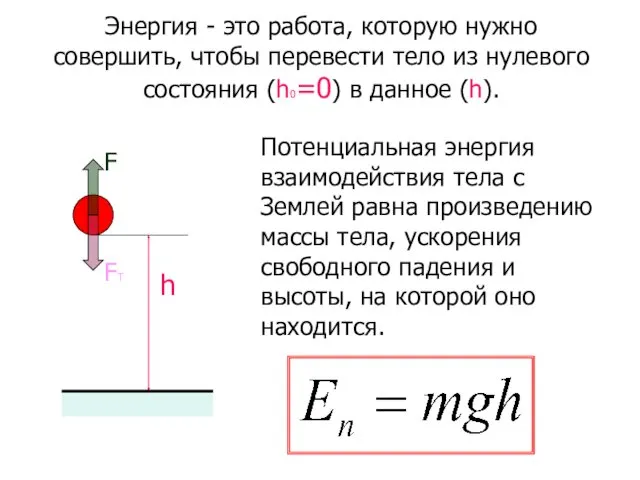
- 10. Потенциальная энергия поднятого над Землей тела - энергия взаимодействия тела с Землей. Потенциальная энергия является относительной
- 11. Потенциальная энергия Выберем уровень Земли за нулевой h0. Определим потенциальную энергию взаимодействия тела с Землей на
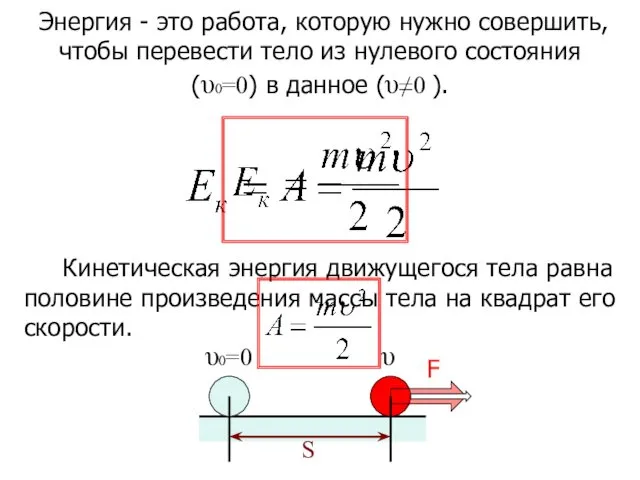
- 12. Энергия - это работа которую, нужно совершить, чтобы перевести тело из нулевого состояния (h0=0) в данное
- 13. Энергия - это работа, которую нужно совершить, чтобы перевести тело из нулевого состояния (h0=0) в данное
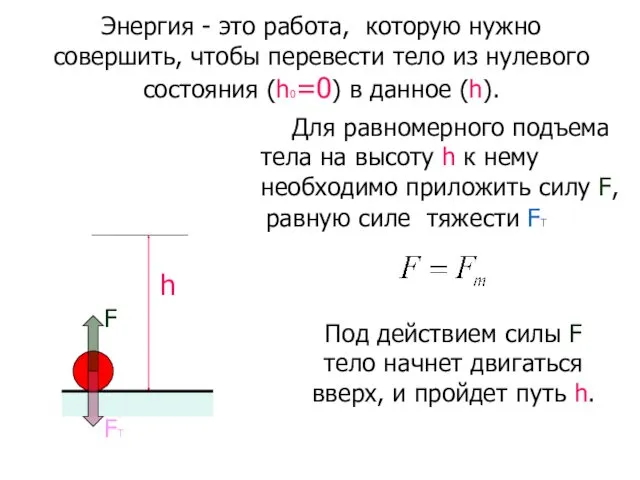
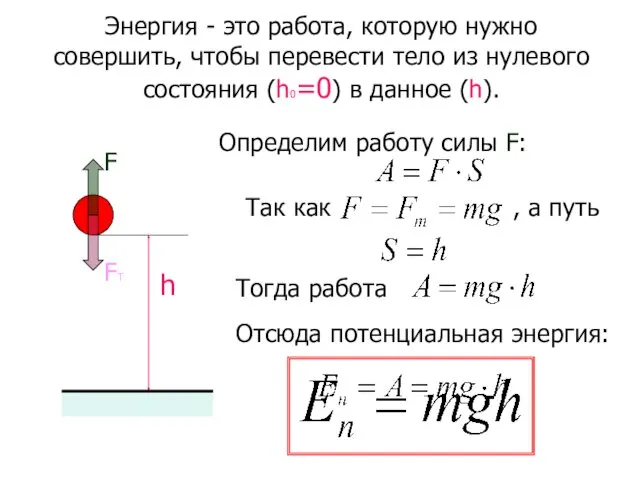
- 14. Энергия - это работа, которую нужно совершить, чтобы перевести тело из нулевого состояния (h0=0) в данное
- 15. Энергия - это работа, которую нужно совершить, чтобы перевести тело из нулевого состояния (h0=0) в данное
- 16. МЕХАНИЧЕСКАЯ ЭНЕРГИЯ КИНЕТИЧЕСКАЯ ПОТЕНЦИАЛЬНАЯ энергия движения энергия взаимодействия Итак:
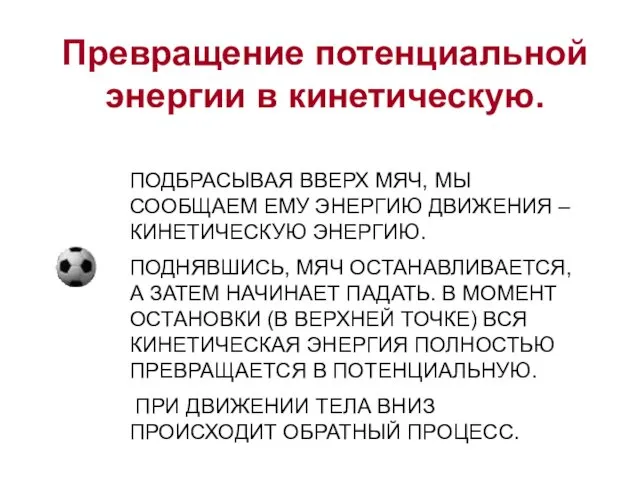
- 17. Превращение потенциальной энергии в кинетическую. ПОДБРАСЫВАЯ ВВЕРХ МЯЧ, МЫ СООБЩАЕМ ЕМУ ЭНЕРГИЮ ДВИЖЕНИЯ – КИНЕТИЧЕСКУЮ ЭНЕРГИЮ.
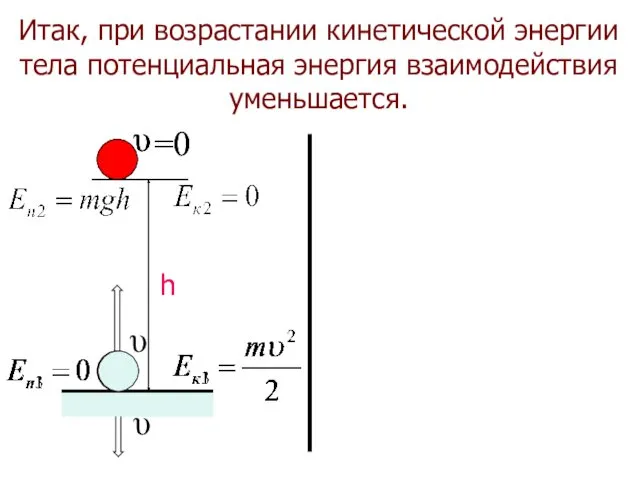
- 18. Итак, при возрастании кинетической энергии тела потенциальная энергия взаимодействия уменьшается.
- 19. И наоборот, при уменьшении кинетической энергии тела потенциальная энергия взаимодействия увеличивается.
- 20. Рассмотрим систему тел, между которыми действуют только консервативные силы . Изменение энергии тела происходит: 1) за
- 21. Потенциальное поле сил. потенциальные - силы зависят только от положения тела в пространстве Силы, работа которых
- 22. Приращение полной энергии системы тел, между которыми действуют только консервативные силы, равно работе внешних сил, приложенных
- 23. Энергия. кинетическая энергия потенциальная энергия движение тела нахождением тела в потенциальном поле сил Δs=Vср·Δt= [(V1+V2)/2]·Δt Δt=2Δs/(V1+V2).
- 24. Связь между потенциальной энергией и силой Каждой точке потенциального поля соответствует с одной стороны некоторое значение
- 25. Условия равновесия механической системы В замкнутой системе полная энергия остается постоянной, поэтому кинетическая энергия Ек может
- 26. Е=Ек+Ер В области заштрихованные серым система проникнуть не может , т.к. потенциальная энергия не может быть
- 27. Деформация. деформация растяжения деформация сдвига деформация всестороннего сжатия. Деформацией – называют смещение частиц тела относительно друг
- 28. Диаграмма растяжения твердого тела. Ерез Естали область упругих деформаций Закон Гука Е - модуль Юнга -
- 29. Моментом любого вектора относительно некоторой точки О называют векторное произведение , где -радиус вектор. Моментом количества
- 30. Момент силы Моментом силы N относительно точки О называется векторное произведение радиус-вектора направленного из точки О
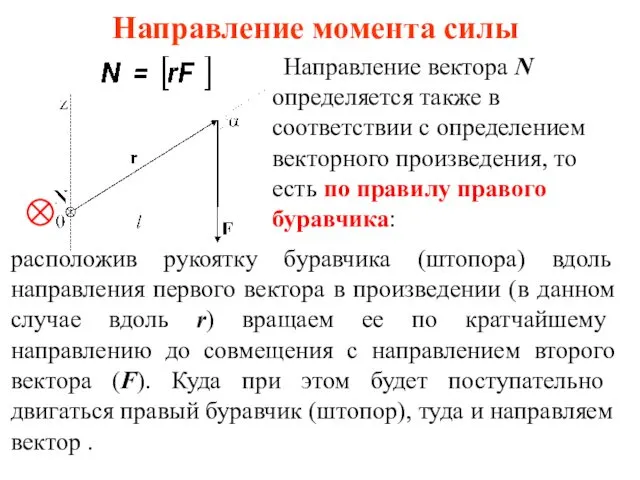
- 31. Направление момента силы Направление вектора N определяется также в соответствии с определением векторного произведения, то есть
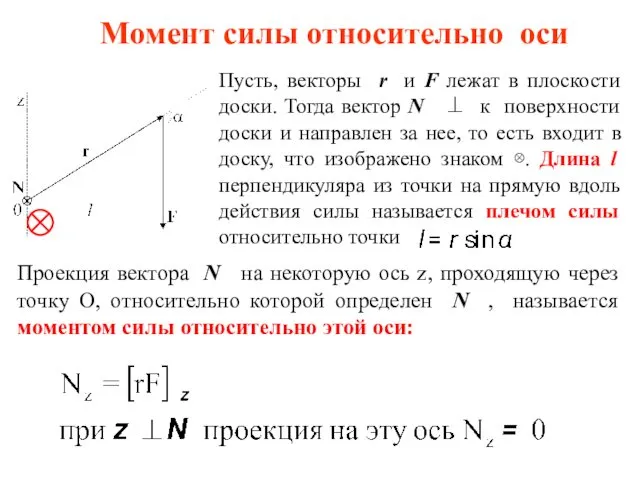
- 32. Момент силы относительно оси Пусть, векторы r и F лежат в плоскости доски. Тогда вектор N
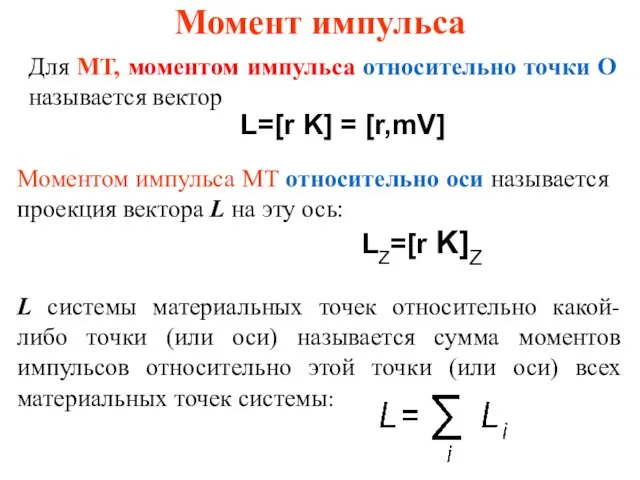
- 33. Момент импульса Для МТ, моментом импульса относительно точки О называется вектор Моментом импульса МТ относительно оси
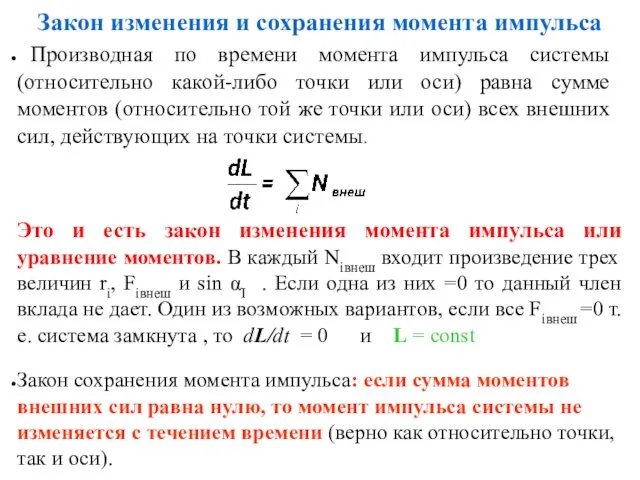
- 34. Закон изменения и сохранения момента импульса Производная по времени момента импульса системы (относительно какой-либо точки или
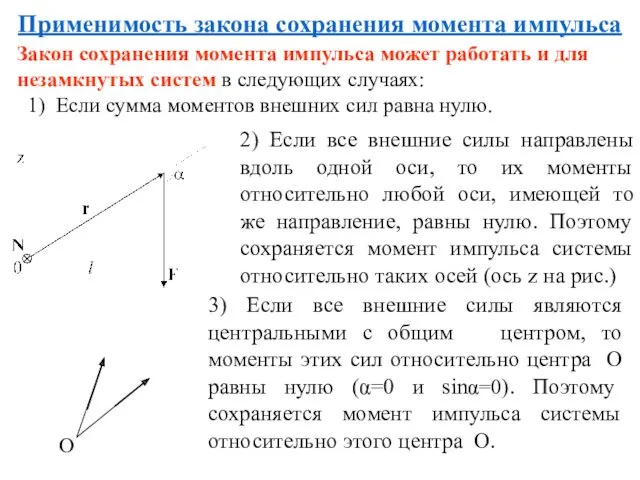
- 35. Применимость закона сохранения момента импульса 2) Если все внешние силы направлены вдоль одной оси, то их
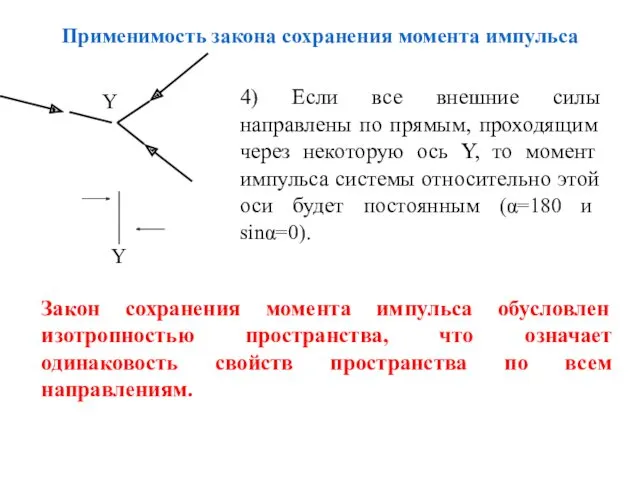
- 36. Применимость закона сохранения момента импульса 4) Если все внешние силы направлены по прямым, проходящим через некоторую
- 37. Абсолютно твердое тело Под твердым телом будем подразумевать абсолютно твердое тело, в котором расстояния между любыми
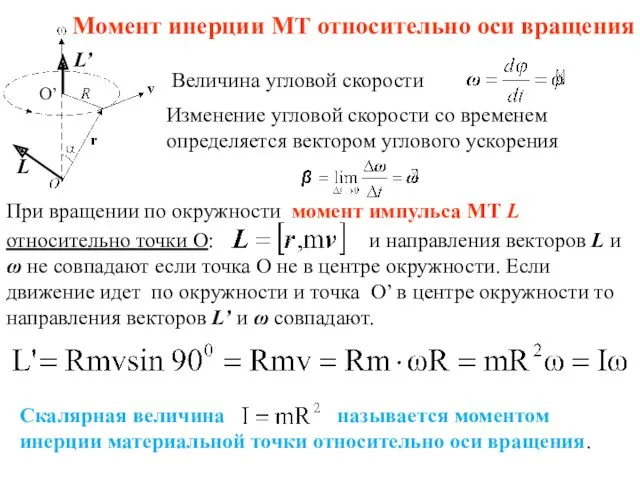
- 38. Момент инерции МТ относительно оси вращения Величина угловой скорости При вращении по окружности момент импульса МТ
- 39. Момент инерции твердого тела Твердое тело можно представить как систему МТ, удерживаемых внутренними силами на неизменных
- 40. Момент инерции полого цилиндра Найдем момент инерции полого цилиндра относительно его оси симметрии ОО. где m
- 41. Момент инерции сложных тел Для полного определения момента инерции более сложных тел выражение следует уточнить, устремив
- 42. Момент инерции сплошного цилиндра Момент инерции сплошного однородного цилиндра относительно оси симметрии ОО можно найти разбив
- 43. Моменты инерции IС некоторых однородных твердых тел относительно оси, проходящей через центр инерции
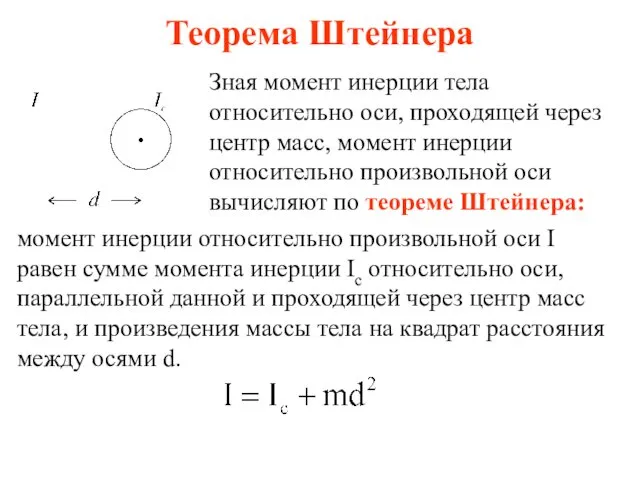
- 44. Теорема Штейнера Зная момент инерции тела относительно оси, проходящей через центр масс, момент инерции относительно произвольной
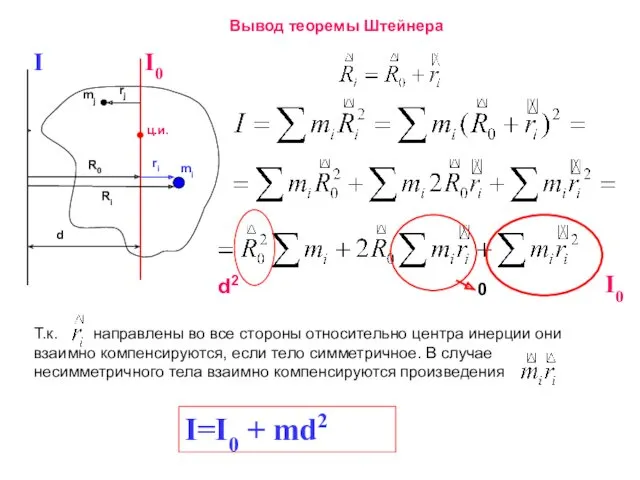
- 45. Вывод теоремы Штейнера d2 0 I0 I=I0 + md2 Т.к. направлены во все стороны относительно центра
- 46. I=I0 + md2 Вычислим по теореме Штейнера момент инерции диска на нити R m L d
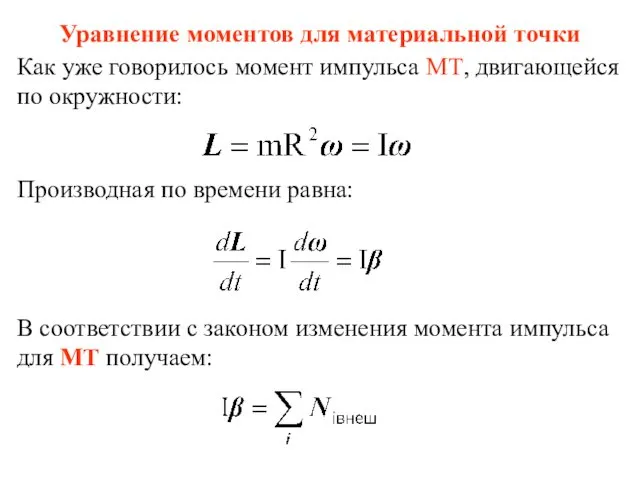
- 47. Уравнение моментов для материальной точки Как уже говорилось момент импульса МТ, двигающейся по окружности: Производная по
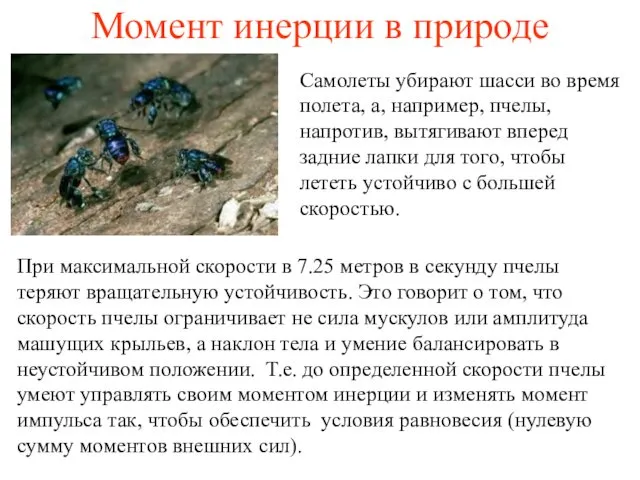
- 48. Момент инерции в природе Самолеты убирают шасси во время полета, а, например, пчелы, напротив, вытягивают вперед
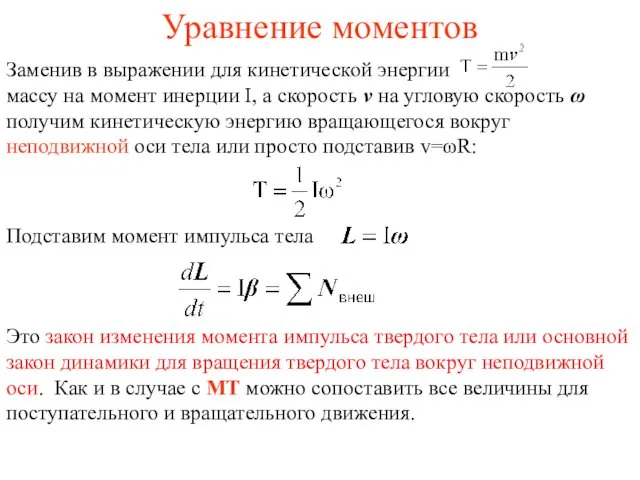
- 49. Уравнение моментов Заменив в выражении для кинетической энергии массу на момент инерции I, а скорость v
- 51. Скачать презентацию
МЕХАНИЧЕСКАЯ
ЭНЕРГИЯ
КИНЕТИЧЕСКАЯ
ПОТЕНЦИАЛЬНАЯ
энергия движения
энергия взаимодействия
Так как в механике изучается движение тел и
МЕХАНИЧЕСКАЯ
ЭНЕРГИЯ
КИНЕТИЧЕСКАЯ
ПОТЕНЦИАЛЬНАЯ
энергия движения
энергия взаимодействия
Так как в механике изучается движение тел и
Потенциальная энергия – это энергия которой обладают предметы в состоянии покоя.
Кинетическая
Потенциальная энергия – это энергия которой обладают предметы в состоянии покоя.
Кинетическая
Кинетическая энергия
- энергия, которой обладает тело вследствие своего движения (характеризует
Кинетическая энергия
- энергия, которой обладает тело вследствие своего движения (характеризует
Кинетическая энергия
Следовательно,
это работа, которую нужно совершить, чтобы перевести тело из нулевого
Кинетическая энергия
Следовательно,
это работа, которую нужно совершить, чтобы перевести тело из нулевого
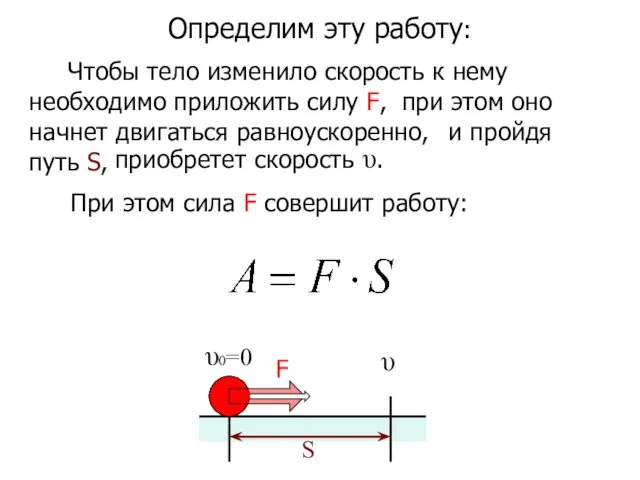
Определим эту работу:
υ
υ0=0
S
Чтобы тело изменило скорость к нему необходимо приложить
Определим эту работу:
υ
υ0=0
S
Чтобы тело изменило скорость к нему необходимо приложить
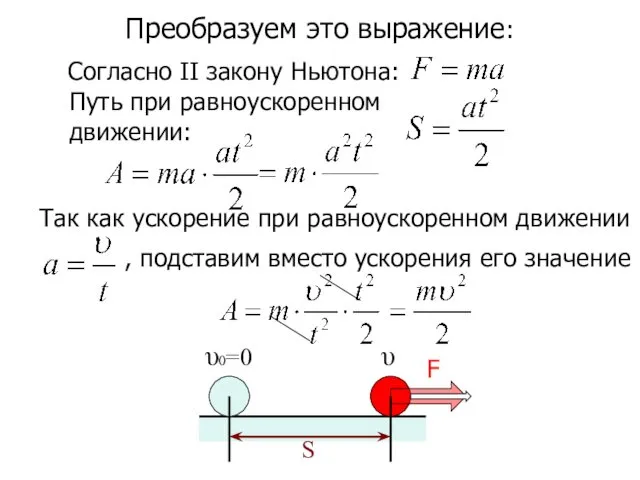
Преобразуем это выражение:
υ
υ0=0
S
Согласно II закону Ньютона:
Путь при равноускоренном движении:
F
, подставим
Преобразуем это выражение:
υ
υ0=0
S
Согласно II закону Ньютона:
Путь при равноускоренном движении:
F
, подставим
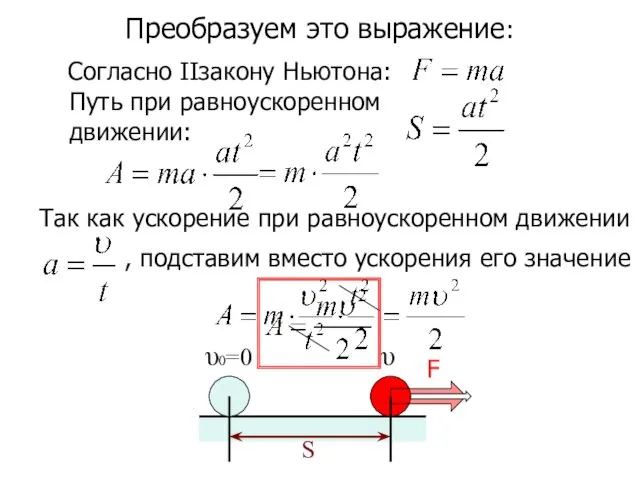
Преобразуем это выражение:
υ
υ0=0
S
Согласно IIзакону Ньютона:
Путь при равноускоренном движении:
F
, подставим вместо
Преобразуем это выражение:
υ
υ0=0
S
Согласно IIзакону Ньютона:
Путь при равноускоренном движении:
F
, подставим вместо
υ
υ0=0
S
F
Кинетическая энергия движущегося тела равна половине произведения массы тела на
υ
υ0=0
S
F
Кинетическая энергия движущегося тела равна половине произведения массы тела на

Потенциальная энергия поднятого над Землей тела
- энергия взаимодействия тела с
Потенциальная энергия поднятого над Землей тела
- энергия взаимодействия тела с
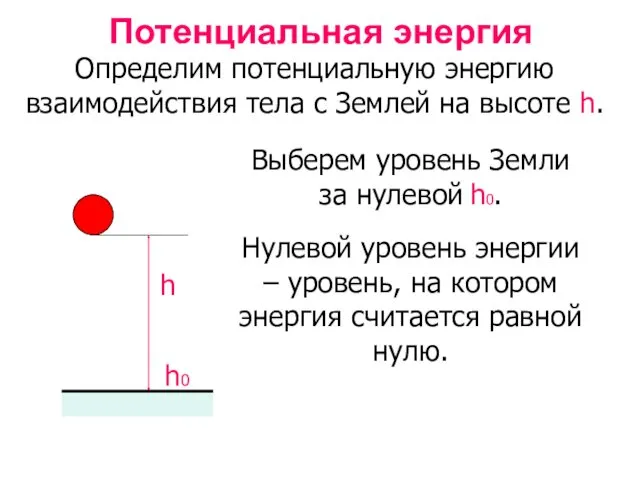
Потенциальная энергия
Выберем уровень Земли за нулевой h0.
Определим потенциальную энергию взаимодействия тела
Потенциальная энергия
Выберем уровень Земли за нулевой h0.
Определим потенциальную энергию взаимодействия тела
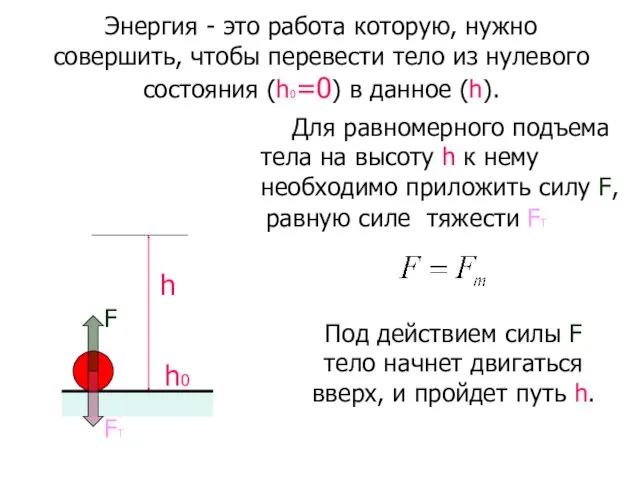
Энергия - это работа которую, нужно совершить, чтобы перевести тело из
Энергия - это работа которую, нужно совершить, чтобы перевести тело из
Энергия - это работа, которую нужно совершить, чтобы перевести тело из
Энергия - это работа, которую нужно совершить, чтобы перевести тело из
Энергия - это работа, которую нужно совершить, чтобы перевести тело из
Энергия - это работа, которую нужно совершить, чтобы перевести тело из
Энергия - это работа, которую нужно совершить, чтобы перевести тело из
Энергия - это работа, которую нужно совершить, чтобы перевести тело из
МЕХАНИЧЕСКАЯ
ЭНЕРГИЯ
КИНЕТИЧЕСКАЯ
ПОТЕНЦИАЛЬНАЯ
энергия движения
энергия взаимодействия
Итак:
МЕХАНИЧЕСКАЯ
ЭНЕРГИЯ
КИНЕТИЧЕСКАЯ
ПОТЕНЦИАЛЬНАЯ
энергия движения
энергия взаимодействия
Итак:
Превращение потенциальной энергии в кинетическую.
ПОДБРАСЫВАЯ ВВЕРХ МЯЧ, МЫ СООБЩАЕМ ЕМУ ЭНЕРГИЮ
Превращение потенциальной энергии в кинетическую.
ПОДБРАСЫВАЯ ВВЕРХ МЯЧ, МЫ СООБЩАЕМ ЕМУ ЭНЕРГИЮ
Итак, при возрастании кинетической энергии тела потенциальная энергия взаимодействия уменьшается.
Итак, при возрастании кинетической энергии тела потенциальная энергия взаимодействия уменьшается.
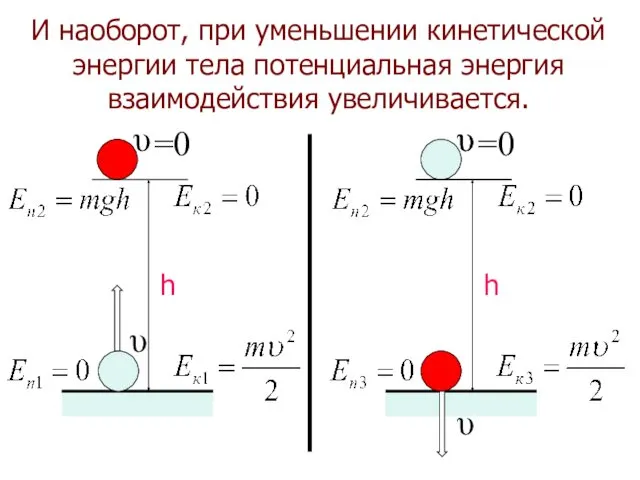
И наоборот, при уменьшении кинетической энергии тела потенциальная энергия взаимодействия увеличивается.
И наоборот, при уменьшении кинетической энергии тела потенциальная энергия взаимодействия увеличивается.
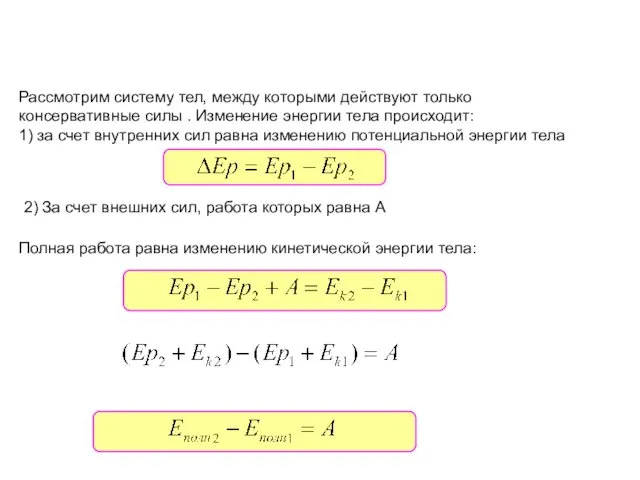
Рассмотрим систему тел, между которыми действуют только консервативные силы . Изменение
Рассмотрим систему тел, между которыми действуют только консервативные силы . Изменение
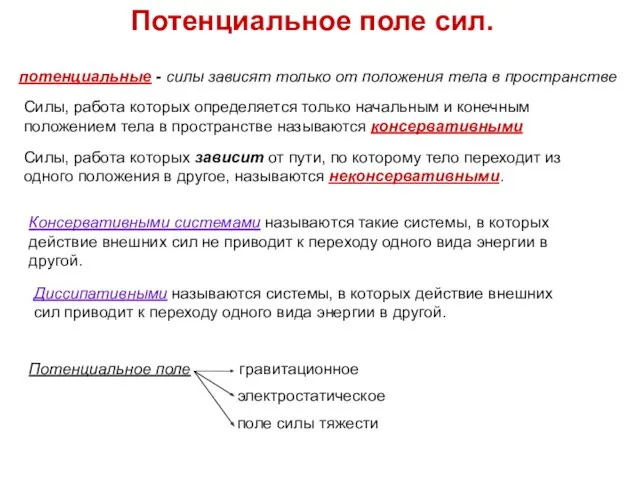
Потенциальное поле сил.
потенциальные - силы зависят только от положения тела в
Потенциальное поле сил.
потенциальные - силы зависят только от положения тела в
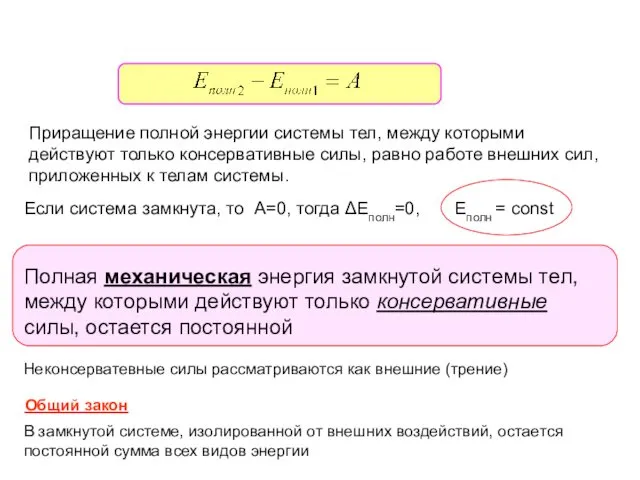
Приращение полной энергии системы тел, между которыми действуют только консервативные силы,
Приращение полной энергии системы тел, между которыми действуют только консервативные силы,
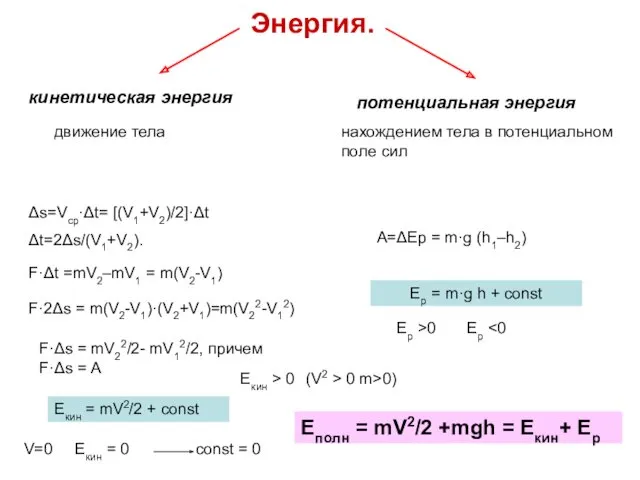
Энергия.
кинетическая энергия
потенциальная энергия
движение тела
нахождением тела в потенциальном поле
Энергия.
кинетическая энергия
потенциальная энергия
движение тела
нахождением тела в потенциальном поле
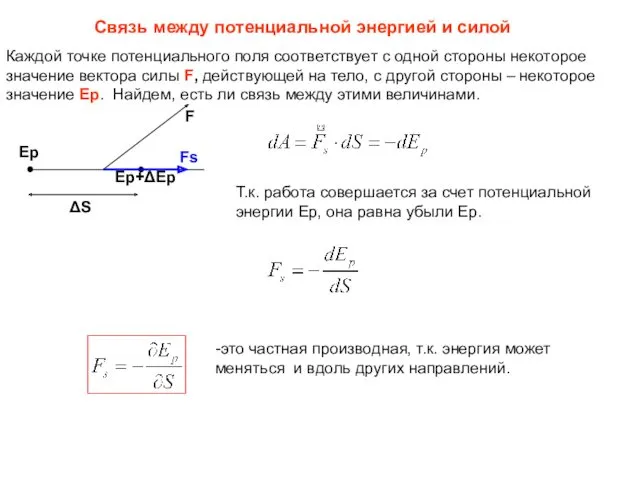
Связь между потенциальной энергией и силой
Каждой точке потенциального поля соответствует с
Связь между потенциальной энергией и силой
Каждой точке потенциального поля соответствует с
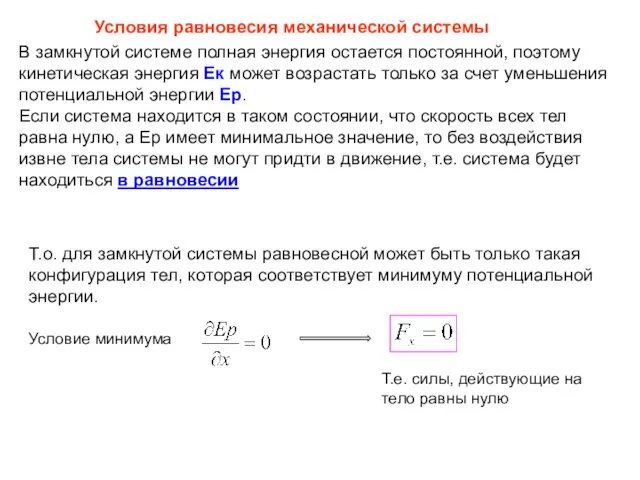
Условия равновесия механической системы
В замкнутой системе полная энергия остается постоянной, поэтому
Условия равновесия механической системы
В замкнутой системе полная энергия остается постоянной, поэтому
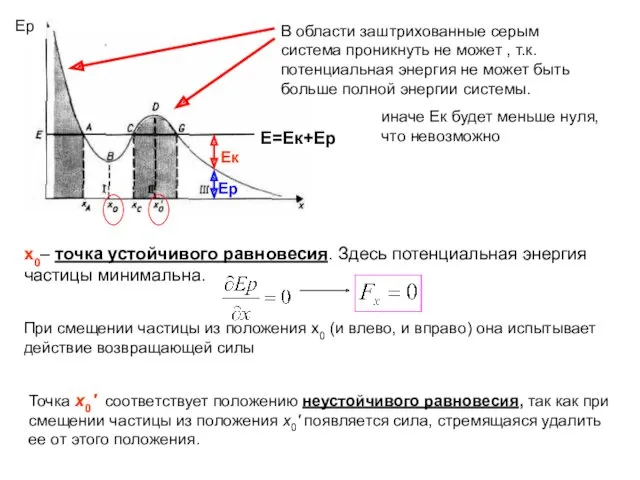
Е=Ек+Ер
В области заштрихованные серым система проникнуть не может , т.к. потенциальная
Е=Ек+Ер
В области заштрихованные серым система проникнуть не может , т.к. потенциальная
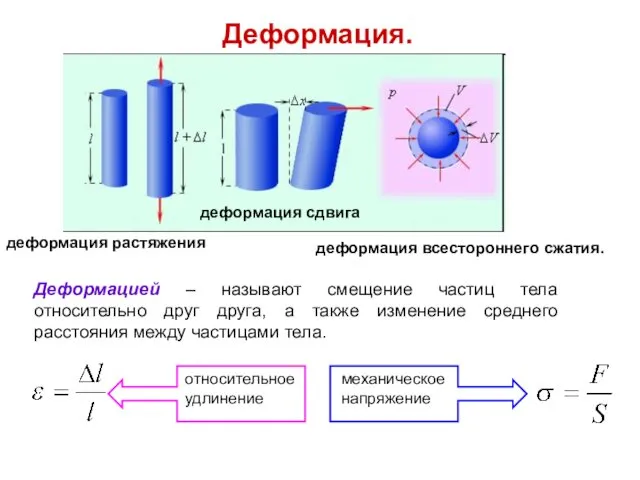
Деформация.
деформация растяжения
деформация сдвига
деформация всестороннего сжатия.
Деформацией – называют смещение частиц тела относительно
Деформация.
деформация растяжения
деформация сдвига
деформация всестороннего сжатия.
Деформацией – называют смещение частиц тела относительно
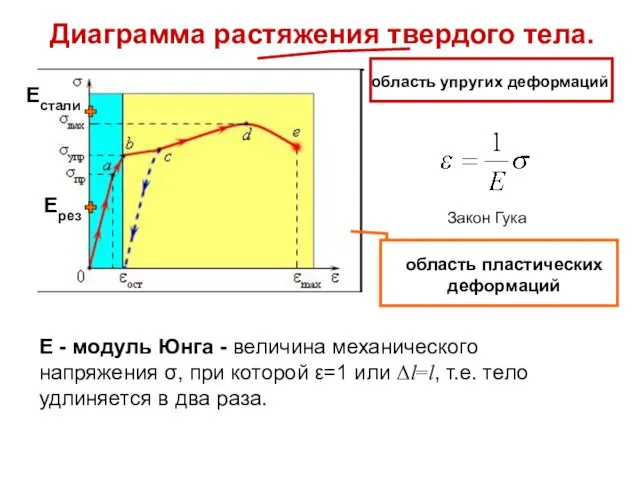
Диаграмма растяжения твердого тела.
Ерез
Естали
область упругих деформаций
Закон Гука
Е - модуль Юнга -
Диаграмма растяжения твердого тела.
Ерез
Естали
область упругих деформаций
Закон Гука
Е - модуль Юнга -
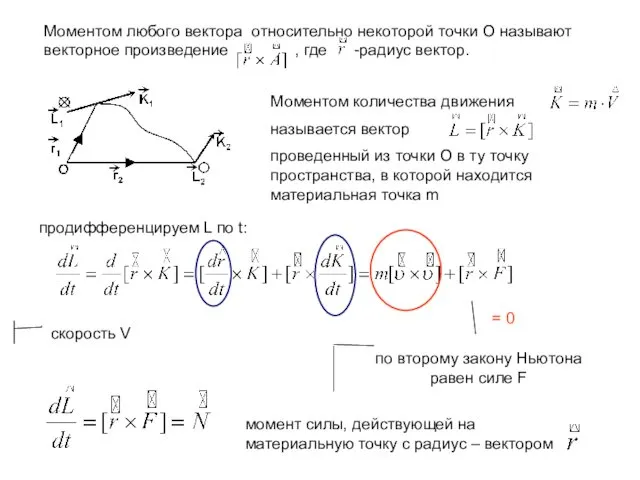
Моментом любого вектора относительно некоторой точки О называют векторное произведение ,
Моментом любого вектора относительно некоторой точки О называют векторное произведение ,
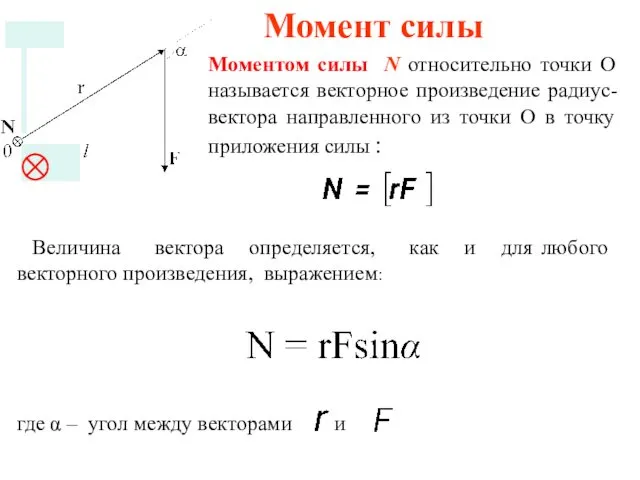
Момент силы
Моментом силы N относительно точки О называется векторное произведение
Момент силы
Моментом силы N относительно точки О называется векторное произведение
Направление момента силы
Направление вектора N определяется также в соответствии с
Направление момента силы
Направление вектора N определяется также в соответствии с
Момент силы относительно оси
Пусть, векторы r и F лежат в плоскости
Момент силы относительно оси
Пусть, векторы r и F лежат в плоскости
Момент импульса
Для МТ, моментом импульса относительно точки О называется вектор
Моментом импульса
Момент импульса
Для МТ, моментом импульса относительно точки О называется вектор
Моментом импульса
Закон изменения и сохранения момента импульса
Производная по времени момента импульса
Закон изменения и сохранения момента импульса
Производная по времени момента импульса
Применимость закона сохранения момента импульса
2) Если все внешние силы направлены вдоль
Применимость закона сохранения момента импульса
2) Если все внешние силы направлены вдоль
Применимость закона сохранения момента импульса
4) Если все внешние силы направлены по
Применимость закона сохранения момента импульса
4) Если все внешние силы направлены по
Абсолютно твердое тело
Под твердым телом будем подразумевать абсолютно твердое тело,
Абсолютно твердое тело
Под твердым телом будем подразумевать абсолютно твердое тело,
Момент инерции МТ относительно оси вращения
Величина угловой скорости
При вращении по окружности
Момент инерции МТ относительно оси вращения
Величина угловой скорости
При вращении по окружности
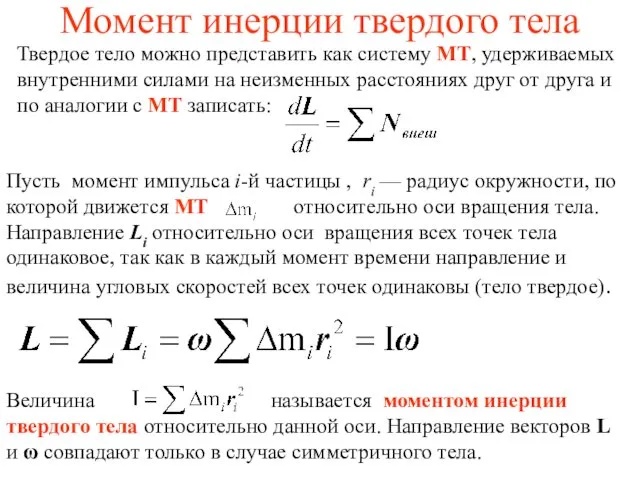
Момент инерции твердого тела
Твердое тело можно представить как систему МТ,
Момент инерции твердого тела
Твердое тело можно представить как систему МТ,
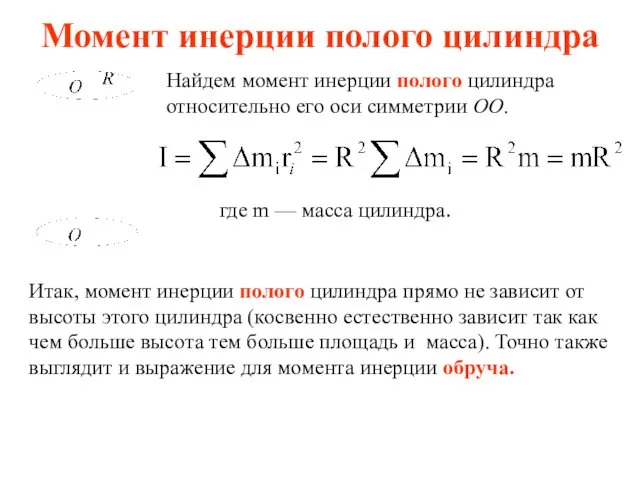
Момент инерции полого цилиндра
Найдем момент инерции полого цилиндра относительно его
Момент инерции полого цилиндра
Найдем момент инерции полого цилиндра относительно его
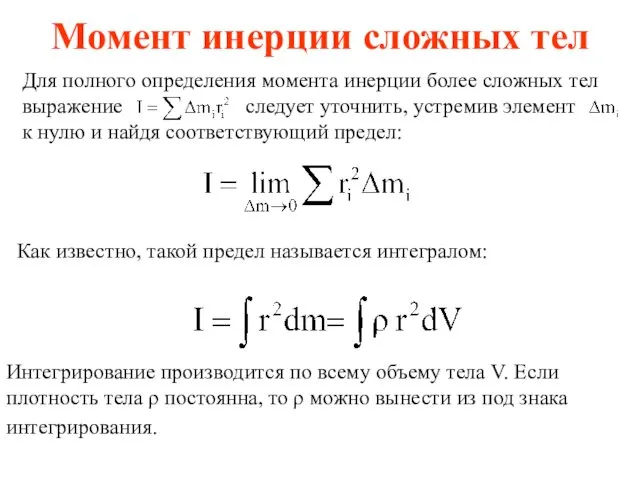
Момент инерции сложных тел
Для полного определения момента инерции более сложных
Момент инерции сложных тел
Для полного определения момента инерции более сложных
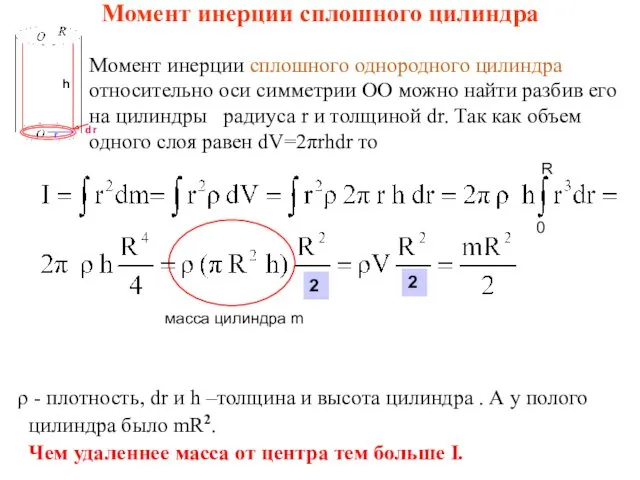
Момент инерции сплошного цилиндра
Момент инерции сплошного однородного цилиндра относительно оси симметрии
Момент инерции сплошного цилиндра
Момент инерции сплошного однородного цилиндра относительно оси симметрии
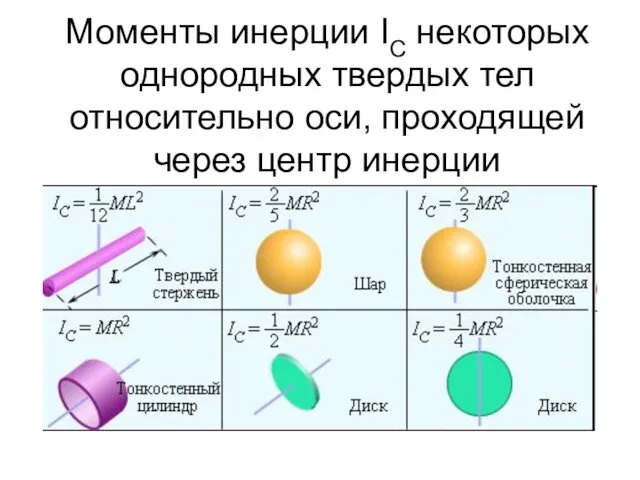
Моменты инерции IС некоторых однородных твердых тел относительно оси, проходящей через
Моменты инерции IС некоторых однородных твердых тел относительно оси, проходящей через
Теорема Штейнера
Зная момент инерции тела относительно оси, проходящей через центр
Теорема Штейнера
Зная момент инерции тела относительно оси, проходящей через центр
Вывод теоремы Штейнера
d2
0
I0
I=I0 + md2
Т.к. направлены во все стороны относительно центра
Вывод теоремы Штейнера
d2
0
I0
I=I0 + md2
Т.к. направлены во все стороны относительно центра

I=I0 + md2
Вычислим по теореме Штейнера момент инерции диска на нити
R
m
L
d
I=I0 + md2
Вычислим по теореме Штейнера момент инерции диска на нити
R
m
L
d
Уравнение моментов для материальной точки
Как уже говорилось момент импульса МТ,
Уравнение моментов для материальной точки
Как уже говорилось момент импульса МТ,
Момент инерции в природе
Самолеты убирают шасси во время полета, а,
Момент инерции в природе
Самолеты убирают шасси во время полета, а,
Уравнение моментов
Заменив в выражении для кинетической энергии
массу на момент
Уравнение моментов
Заменив в выражении для кинетической энергии
массу на момент
 Портландцемент. Химический состав
Портландцемент. Химический состав Завершение объединения русских земель
Завершение объединения русских земель Презентация по кулинарии 11класс.
Презентация по кулинарии 11класс. Свойства и применение нанокомпозитов
Свойства и применение нанокомпозитов Мой светлый город Волжский
Мой светлый город Волжский Проектирование разработки сеноманских отложений на Заполярном месторождении
Проектирование разработки сеноманских отложений на Заполярном месторождении Смута в российском государстве
Смута в российском государстве Цветовое решение подземного прехода
Цветовое решение подземного прехода Мама – первое слово, главное слово в нашей судьбе
Мама – первое слово, главное слово в нашей судьбе Запуск мобильного оператора Теле2 в Саранске
Запуск мобильного оператора Теле2 в Саранске Урок - экспедиция По морям по волнам
Урок - экспедиция По морям по волнам Силы в природе
Силы в природе День автомобилиста
День автомобилиста Заседание профбюро. Культурно-массовая и просветительская деятельность
Заседание профбюро. Культурно-массовая и просветительская деятельность Обновления в CSS3
Обновления в CSS3 Экономические задачи повышенного уровня сложности в ЕГЭ
Экономические задачи повышенного уровня сложности в ЕГЭ CASE-технологии
CASE-технологии Карл Павлович Брюллов (1799-1852). Итальянская тематика
Карл Павлович Брюллов (1799-1852). Итальянская тематика Система мотивации персонала в аптеках и аптечных сетях
Система мотивации персонала в аптеках и аптечных сетях Технологический процесс изготовления оснастки для сборки фильтрующих элементов наномембранных фильтров
Технологический процесс изготовления оснастки для сборки фильтрующих элементов наномембранных фильтров Котел Buderus Logamax plus GB172i
Котел Buderus Logamax plus GB172i Животные моей местности
Животные моей местности IntegreX - станок для лазерной резки
IntegreX - станок для лазерной резки 20231213_gzhel
20231213_gzhel Графикалық режим
Графикалық режим Типологический портрет политического обозревателя на примере Александра Хроленко
Типологический портрет политического обозревателя на примере Александра Хроленко Газобалонное оборудование второго поколения на СНГ и СПГ
Газобалонное оборудование второго поколения на СНГ и СПГ Текст Скворечник. Коррекционное образовательное учреждение
Текст Скворечник. Коррекционное образовательное учреждение