- Мехатронные модули

Содержание
- 2. Систематика мехатронных модулей
- 3. На рис. 5.1 представлена, одна из известных, классификаций мехатронных модулей по конструктивным признакам. В данной классификации
- 4. Рассмотрим мехатронные модули согласно представленной классификации.
- 5. Преобразователи движения Передача движения от двигателя к выходному звену мехатронного модуля может быть обеспечена с помощью
- 6. Реечные передачи Реечная передача предназначена для преобразования вращательного движения шестерни в поступательное движение рейки и, наоборот,
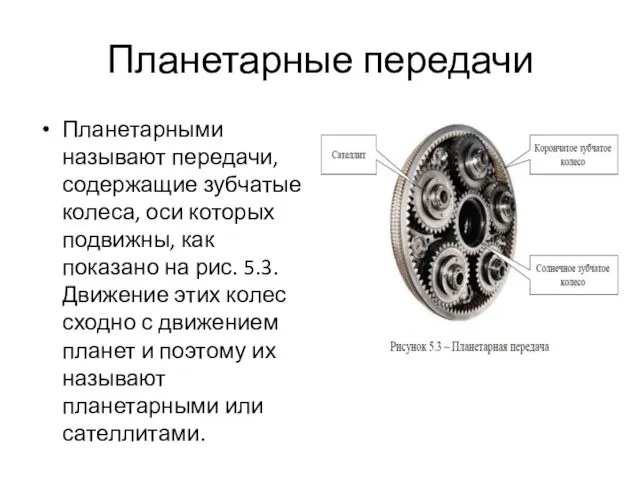
- 7. Планетарные передачи Планетарными называют передачи, содержащие зубчатые колеса, оси которых подвижны, как показано на рис. 5.3.
- 8. Простейшая планетарная передача состоит из центрального солнечного зубчатого колеса с наружными зубьями, центрального корончатого зубчатого колеса
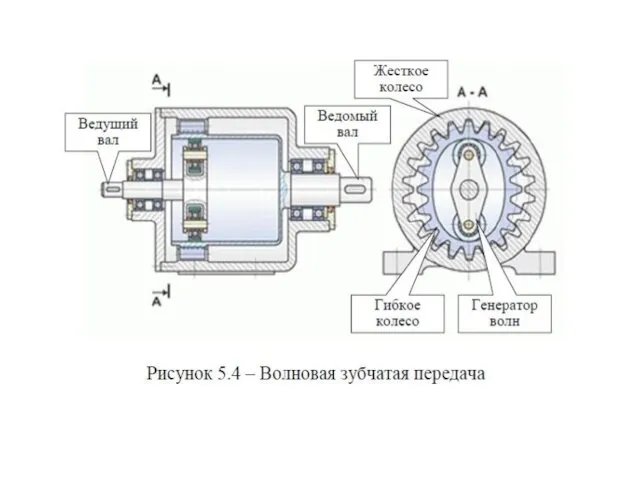
- 9. Волновые зубчатые передачи Работа волновой передачи основана на принципе преобразования параметров движения вследствие волнового деформирования одного
- 11. Недостатками волновых передач являются: ограничение по частотам вращения ведущего вала генератора волн при больших диаметрах колес
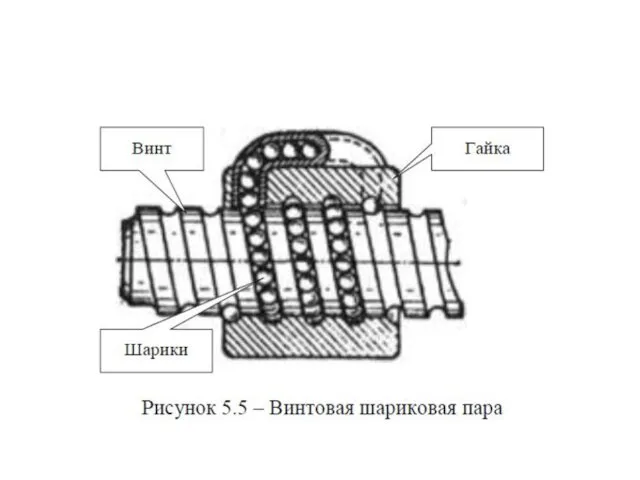
- 12. Передача винт-гайка качения Передача винт-гайка качения (шарико-винтовая передача) предназначена для преобразования вращательного в поступательное движение, и
- 14. Передача винт-гайка скольжения
- 15. Передача обладает простотой конструкции и изготовления, компактностью при высокой нагрузочной способности, высокой надежностью, плавностью и бесшумностью,
- 16. Передачи с гибкой связью Передачи с гибкой связью предназначены для передачи вращательного движения и преобразования поступательного
- 17. Направляющие Направляющими называют конструктивные элементы устрой-ства, обеспечивающие заданное относительное движение элемен-тов механизма. В мехатронных модулях в
- 18. Тормозные устройства и механизмы для выборки люфтов Тормозными называют устройства, которыми снабжают мехатронные модули, для уменьшения
- 19. Механические тормозные устройства – пружинные, резиновые, эластомерные, инерционные и фрикционные. Гидравлические – устройства дроссельного регулирования. Пневматические
- 20. Ко всем типам тормозных устройств предъявляют следующие основные требования: обеспечение заданного закона торможения; безударный останов и
- 21. Электродвигатели мехатронных модулей Применение в мехатронных системах электродвигателей постоянного тока обусловлено такими их преимуществами как: линейность
- 22. В мехатронных модулях линейного движения, которые применяются в многоцелевых станках, комплексах лазерной резки, некоторых видах транспорта,
- 23. Силовые преобразователи Силовые преобразователи применяются в различных мехатронных модулях движения, в которых превращение электрической энергии в
- 24. Для электропривода постоянного тока применяют два типа преобразователей: преобразователи напряжения переменного тока в постоянный (управляемый выпрямитель)
- 25. Микропроцессорные системы управления Микропроцессорная система (МПС) это микро-ЭВМ или вычислительный комплекс (ВК), построенный на основе микропроцессорного
- 26. Сущность применения микропроцессоров заключается в том, что они заменяют цифровые ИС малой и средней степени интеграции
- 27. Устройства и системы, построенные на основе микропроцес-соров, имеют два основных преимущества перед устройствами, реализованными аппаратным способом:
- 28. МПС различаются областями применения, архитектурой и конструктивным исполнением. Архитектуру МПС можно описать тремя составляющими: • состав,
- 29. Современные МПС реализуют архитектуру, которая воплоща-ет, как правило, следующие принципы: • принцип хранимой в памяти программы;
- 30. Важной характеристикой МПС является число центральных процессоров. По этому признаку различают следующие виды МПС: • однопроцессорные
- 31. Микроконтроллеры Особенностью построения современных технических систем, в том числе мехатронных, является широкая автоматизация процессов, контроля их
- 32. Если персональные компьютеры ориентированы на пользователя, то микроконтроллеры − на объект управления. В отличие от микропроцессоров
- 33. Спектр применения МК чрезвычайно широк. В наши дни на их базе создают интеллектуальные датчики, системы управления
- 34. Устройствами ввода в микроконтроллеры являются преобра-зователи информации, а именно датчики, установленные на объек-те управления. Датчики преобразуют
- 35. Устройствами вывода микроконтроллеров являются исполни-тельные механизмы объектов, как правило, это − электронная сис-тема управления электрическими проводами.
- 36. Микроконтроллеры обычно работают в реальном масштабе времени и выполняют ограниченный набор программ, повторяю-щихся во времени. В
- 37. Цифровые сигнальные процессоры Цифровые сигнальные процессоры (Digital Signal Processor – DSP) являются разновидностью микропроцессоров и предназначе-ны
- 38. Вывод: Мехатронный модуль – это функционально и конструктивно самостоятельное изделие для реализации движений с взаимопроникновением и
- 40. Скачать презентацию

Систематика мехатронных модулей
Систематика мехатронных модулей
На рис. 5.1 представлена, одна из известных, классификаций мехатронных модулей по
На рис. 5.1 представлена, одна из известных, классификаций мехатронных модулей по
Рассмотрим мехатронные модули согласно представленной классификации.
Рассмотрим мехатронные модули согласно представленной классификации.
Преобразователи движения
Передача движения от двигателя к выходному звену мехатронного модуля может
Преобразователи движения
Передача движения от двигателя к выходному звену мехатронного модуля может

Реечные передачи
Реечная передача предназначена для преобразования вращательного движения шестерни в поступательное
Реечные передачи
Реечная передача предназначена для преобразования вращательного движения шестерни в поступательное
Планетарные передачи
Планетарными называют передачи, содержащие зубчатые колеса, оси которых подвижны, как
Планетарные передачи
Планетарными называют передачи, содержащие зубчатые колеса, оси которых подвижны, как
Простейшая планетарная передача состоит из центрального солнечного зубчатого колеса с наружными
Простейшая планетарная передача состоит из центрального солнечного зубчатого колеса с наружными
Волновые зубчатые передачи
Работа волновой передачи основана на принципе преобразования параметров движения
Волновые зубчатые передачи
Работа волновой передачи основана на принципе преобразования параметров движения
Недостатками волновых передач являются: ограничение по частотам вращения ведущего вала генератора
Недостатками волновых передач являются: ограничение по частотам вращения ведущего вала генератора
Передача винт-гайка качения
Передача винт-гайка качения (шарико-винтовая передача) предназначена для преобразования вращательного
Передача винт-гайка качения
Передача винт-гайка качения (шарико-винтовая передача) предназначена для преобразования вращательного

Передача винт-гайка скольжения
Передача винт-гайка скольжения
Передача обладает простотой конструкции и изготовления, компактностью при высокой нагрузочной способности,
Передача обладает простотой конструкции и изготовления, компактностью при высокой нагрузочной способности,
Передачи с гибкой связью
Передачи с гибкой связью предназначены для передачи вращательного
Передачи с гибкой связью
Передачи с гибкой связью предназначены для передачи вращательного
Направляющие
Направляющими называют конструктивные элементы устрой-ства, обеспечивающие заданное относительное движение элемен-тов механизма.
В
Направляющие
Направляющими называют конструктивные элементы устрой-ства, обеспечивающие заданное относительное движение элемен-тов механизма.
В
Тормозные устройства и механизмы для выборки люфтов
Тормозными называют устройства, которыми снабжают
Тормозные устройства и механизмы для выборки люфтов
Тормозными называют устройства, которыми снабжают
Механические тормозные устройства – пружинные, резиновые, эластомерные, инерционные и фрикционные.
Гидравлические
Механические тормозные устройства – пружинные, резиновые, эластомерные, инерционные и фрикционные.
Гидравлические
Ко всем типам тормозных устройств предъявляют следующие основные требования: обеспечение заданного
Ко всем типам тормозных устройств предъявляют следующие основные требования: обеспечение заданного
Электродвигатели мехатронных модулей
Применение в мехатронных системах электродвигателей постоянного тока обусловлено такими
Электродвигатели мехатронных модулей
Применение в мехатронных системах электродвигателей постоянного тока обусловлено такими
В мехатронных модулях линейного движения, которые применяются в многоцелевых станках, комплексах
В мехатронных модулях линейного движения, которые применяются в многоцелевых станках, комплексах
Силовые преобразователи
Силовые преобразователи применяются в различных мехатронных модулях движения, в которых
Силовые преобразователи
Силовые преобразователи применяются в различных мехатронных модулях движения, в которых
Для электропривода постоянного тока применяют два типа преобразователей: преобразователи напряжения переменного
Для электропривода постоянного тока применяют два типа преобразователей: преобразователи напряжения переменного
Микропроцессорные системы управления
Микропроцессорная система (МПС) это микро-ЭВМ или вычислительный комплекс (ВК),
Микропроцессорные системы управления
Микропроцессорная система (МПС) это микро-ЭВМ или вычислительный комплекс (ВК),
Сущность применения микропроцессоров заключается в том, что они заменяют цифровые ИС
Сущность применения микропроцессоров заключается в том, что они заменяют цифровые ИС
Устройства и системы, построенные на основе микропроцес-соров, имеют два основных преимущества
Устройства и системы, построенные на основе микропроцес-соров, имеют два основных преимущества
МПС различаются областями применения, архитектурой и конструктивным исполнением. Архитектуру МПС можно
МПС различаются областями применения, архитектурой и конструктивным исполнением. Архитектуру МПС можно
Современные МПС реализуют архитектуру, которая воплоща-ет, как правило, следующие принципы:
• принцип
Современные МПС реализуют архитектуру, которая воплоща-ет, как правило, следующие принципы:
• принцип
Важной характеристикой МПС является число центральных процессоров. По этому признаку различают
Важной характеристикой МПС является число центральных процессоров. По этому признаку различают
Микроконтроллеры
Особенностью построения современных технических систем, в том числе мехатронных, является широкая
Микроконтроллеры
Особенностью построения современных технических систем, в том числе мехатронных, является широкая
Если персональные компьютеры ориентированы на пользователя, то микроконтроллеры − на объект
Если персональные компьютеры ориентированы на пользователя, то микроконтроллеры − на объект
Спектр применения МК чрезвычайно широк. В наши дни на их базе
Спектр применения МК чрезвычайно широк. В наши дни на их базе
Устройствами ввода в микроконтроллеры являются преобра-зователи информации, а именно датчики, установленные
Устройствами ввода в микроконтроллеры являются преобра-зователи информации, а именно датчики, установленные
Устройствами вывода микроконтроллеров являются исполни-тельные механизмы объектов, как правило, это −
Устройствами вывода микроконтроллеров являются исполни-тельные механизмы объектов, как правило, это −
Микроконтроллеры обычно работают в реальном масштабе времени и выполняют ограниченный набор
Микроконтроллеры обычно работают в реальном масштабе времени и выполняют ограниченный набор
Цифровые сигнальные процессоры
Цифровые сигнальные процессоры (Digital Signal Processor – DSP) являются
Цифровые сигнальные процессоры
Цифровые сигнальные процессоры (Digital Signal Processor – DSP) являются
Вывод:
Мехатронный модуль – это функционально и конструктивно самостоятельное изделие для реализации
Вывод:
Мехатронный модуль – это функционально и конструктивно самостоятельное изделие для реализации
 Проектирование районной ГПП 220/35/10 кВ
Проектирование районной ГПП 220/35/10 кВ проект Жуков Н.Г
проект Жуков Н.Г Форма государства Российской Федерации
Форма государства Российской Федерации Презентация по подготовке и обучению грамоте
Презентация по подготовке и обучению грамоте презентация Моё портфолио
презентация Моё портфолио Презентация к неделе естественных наук
Презентация к неделе естественных наук Некроз. Некроз алды кезеңі (паранекроз)
Некроз. Некроз алды кезеңі (паранекроз) Химическая промышленность. Состав, место и значение в хозяйстве. Урок 17-18
Химическая промышленность. Состав, место и значение в хозяйстве. Урок 17-18 Алкиндер
Алкиндер История создания стихотворения Родина. (М.Ю.Лермонтов, 1841)
История создания стихотворения Родина. (М.Ю.Лермонтов, 1841) 75 орындық толық циклмен жұмыс істейтін асхана
75 орындық толық циклмен жұмыс істейтін асхана Программирование ветвящихся алгоритмов
Программирование ветвящихся алгоритмов Кадровое агентство Work&fun
Кадровое агентство Work&fun Теоретические концепции политической культуры
Теоретические концепции политической культуры Внутренние воды Северной Америки
Внутренние воды Северной Америки Период грудного возраста. Лекция № 5
Период грудного возраста. Лекция № 5 Countable and uncountable. Quantifiers
Countable and uncountable. Quantifiers Пасха
Пасха Белорусско-польские культурные связи в 1991-2014 годы на примере Гродненской области
Белорусско-польские культурные связи в 1991-2014 годы на примере Гродненской области Texting while driving - another kind of impairment
Texting while driving - another kind of impairment Проект Компьютер - наш помощник в образовании и развитии дошкольников
Проект Компьютер - наш помощник в образовании и развитии дошкольников День матери. Шаблон проекта
День матери. Шаблон проекта Школы российской культурологии в XIX веке
Школы российской культурологии в XIX веке Энтропия в экономической системе
Энтропия в экономической системе Проблема применения лекарственных препаратов с недоказанной эффективностью
Проблема применения лекарственных препаратов с недоказанной эффективностью Конденсаторы. Электроемкость
Конденсаторы. Электроемкость Про те, якими ми не є
Про те, якими ми не є Муфты. Подбор соединительных муфт. Тема 3.13
Муфты. Подбор соединительных муфт. Тема 3.13