- Методы наблюдений в навигации

Содержание
- 2. 3.1 Общие определения Основная задача навигации- Определение местоположения R (X,Y,Z) и вектора скорости R(X’,Y’,Z’) объекта в
- 3. Три кита, на которых держится навигация: Геодезия Опорная система координат Картография Астрономия Основные законы движения светил
- 4. Общие определения: В результате решения навигационной задачи получается : расширенный вектор состояния: P = (R, dt,
- 5. Общие определения Измеряется: Навигационный параметр НП ρ – дальность, vr – радиальная скорость Или радионавигационный параметр
- 6. Общие определения Поверхность положения – геометрическое место точек с одинаковым значением навигационного параметра. В ГНСС: дальность
- 7. Общие определения Навигационная функция – функциональная связь между расширенным вектором состояния Р и навигационным параметром: P
- 8. Что включает в себя расширенный вектор состояния? Какой навигационный параметр в ГНСС? Что такое поверхность положения?
- 9. Методы навигации По наземным ориентирам Светотехнические (маяки, фонари) Астрономические Инерциальные (ИНС) Радиотехнические наземные Геотехнические Методы КГ
- 10. 3.2 Инерциальные методы навигации Автономные средства навигации, на борту самолетов, ракет, КА, морских судов, подлодок, в
- 11. Комплексные системы астроинерциальной навигации Гироскопы Создание опорной СК Компьютер Интегрирование R’’, Вычисление скорости и направления движения
- 12. Измеряются: Направление (гироскоп, гирокомпас) Ускорение (акселерометр) Время (часы, стандарт частоты) Дополнительные данные для коррекции (навигационные звезды,
- 13. Измерение ускорений. Колебания М.Шулера. Контур Шулера. Акселерометр измеряет ускорение: a’ = a + g, где g
- 14. Колебания М.Шулера. Контур Шулера. Система с обратной связью второго порядка ведет себя как генератор колебаний очень
- 15. Колебания М.Шулера. Контур Шулера. + коррекция кориолисова ускорения
- 16. Инерциальные приборы. Варианты системы. В прежних системах инерциальной навигации опорная система координат обеспечивалась установкой акселерометров и
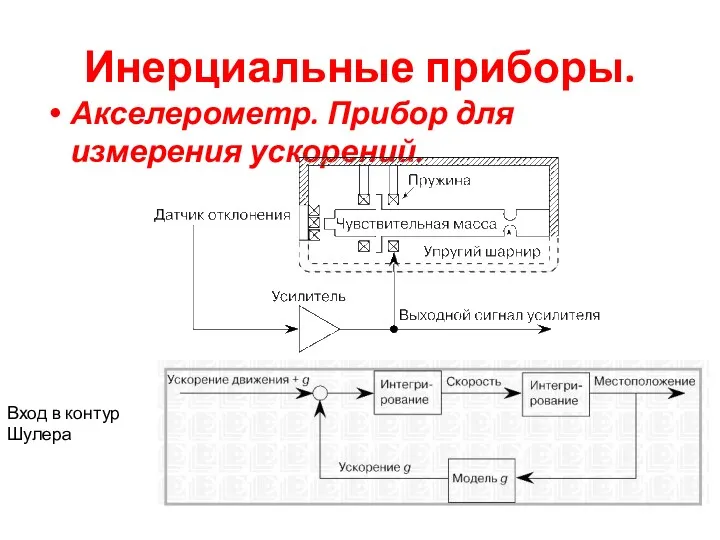
- 17. Инерциальные приборы. Акселерометр. Прибор для измерения ускорений. Вход в контур Шулера
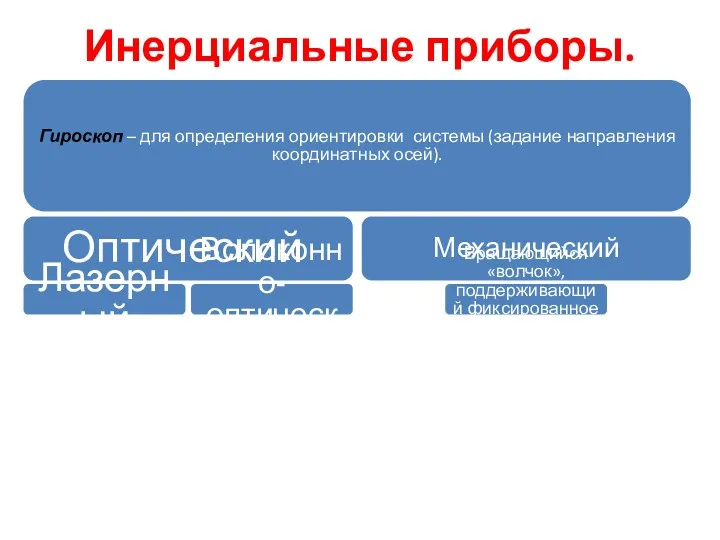
- 18. Инерциальные приборы. Гироскоп – для определения ориентировки системы (задание направления координатных осей). Оптический Лазерный Волоконно-оптический Механический
- 19. Гирокомпас: гироскоп, то есть вращающееся колесо (ротор), установленное в кардановом подвесе, который обеспечивает оси ротора свободную
- 20. Лазерный гироскоп Два лазерных луча, генерируемые разрядом между анодами и катодом, распространяются навстречу друг другу в
- 21. Волоконно-оптический гироскоп. Лазерные лучи распространяются по замкнутому пути, частью которого является свернутое в спираль оптическое волокно.
- 22. Достоинства и недостатки инерциальной навигации Достоинства: Автономность Не зависят от погодных условий Не поддаются радиоэлектронному подавлению
- 23. Достоинства и недостатки инерциальной навигации Недостатки: Необходимость настраивания не только по скорости и местоположению, но и
- 24. Достоинства и недостатки инерциальной навигации Недостатки: Накопление ошибки со временем. Накопленную ошибку можно скорректировать с помощью
- 25. Примеры инерциальных навигационных систем http://www.gnssplus.ru/company.html - Компания ГНСС+ кинематические измерения линейных объектов, а также различные авиационные
- 26. Примеры инерциальных навигационных систем СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ (патент РФ № 2454498) Духин Степан
- 27. Перечислите методы навигации Что такое счисление пути? Два основных прибора для инерциальной навигации. Для чего нужен
- 28. 3.3 Радиотехнические методы навигации Радиодальномерные (расстояния) Доплеровские (радиальная скорость) Наземная навигация Радиомаяки Гиперболические системы
- 29. 3.3.1 Радиомаяки На берегу – радиомаяки. Передают радиосигнал (местоположение маяка). На корабле: радипеленгатор. Измеряет пеленг (направление).
- 30. 3.3.2 Гиперболические системы (наземные) Измеряется разность времени прихода сигналов от двух разнесенных в пространстве наземных радиостанций
- 31. Гиперболические системы Низкие частоты, длинные волны, огибание поверхности Земли, - Нет ограничения на прямую видимость. Сигналами
- 32. Разностно-дальномерная система «ЛОРАН-С» Стандартная система для судоходства США
- 33. Фазовая гиперболическая радионавигационная система «Омега» (OMEGA).
- 34. «Чайка» — импульсно-фазовая радионавигационная система длинноволнового диапазона, предназначенная для определения координат самолётов и кораблей с погрешностью
- 35. Современные наземные радионавигационные системы 1. eLORAN – «улучшенная наземная система навигации США» (точность метры-дециметры). С характеристиками
- 36. Принцип навигации по радиомаякам. Принцип навигации в гиперболических системах Точность и дальнодействие гиперболических систем навигации Примеры
- 37. 3.3.3 Доплеровские системы Эффект Доплера: изменение частоты принимаемого сигнала при движении источника сигнала относительно приемника Изменение
- 38. Навигационная функция (доплеровские системы) Vr = Vr(R, R*, ГПЗ,ПВЗ, ΣΔρ), R – положение пункта в ОЗСК,
- 39. Уравнение Доплеровского позиционирования Расстояние от пункта А до спутника i : Скорость - дифференцирование расстояния по
- 40. Доплеровские спутниковые системы ГНСС первого поколения: TRANZIT (США), ЦИКАДА (СССР) Определение координат наземных пунктов XA, YA,
- 41. ГНСС первого поколения TRANZIT и ЦИКАДА В СССР в 1984-1993 гг создана доплеровская геодезическая сеть (TRANZIT)
- 42. Доплеровские спутниковые системы PRARE (Германия) DORIS (Франция) Определение орбит ИСЗ (координат спутника Xi, Yi, Zi) из
- 43. PRARE – Precise Range And Range-Rate Equipment Работа системы – 1982 – 2006 (?) 3 сегмента
- 44. Спутник системы PRARE ERS-2
- 45. DORIS – Doppler Orbitography and Radiopositioning Integrated by Satellite
- 48. Задачи, решаемые с помощью DORIS, PRARE Точное определение орбит ИСЗ; Определение координат и скоростей движения станций;
- 49. IDS – International DORIS Service http://www.ids-doris.org/
- 50. 3.3.4 Спутниковая альтиметрия (измерение расстояния от ИСЗ до поверхности океана) Радиовысотомер: высокочастотные импульсы ЭМ волн сантиметрового
- 51. Векторное уравнение спутниковой альтиметрии R = r + ρ
- 52. Навигационная функция (альтиметрия) ρ= ρ(геоид, R*, ΣΔρ), R* - положение спутника ΣΔρ - сумма поправок в
- 53. Задачи, решаемые с помощью спутниковой альтиметрии Если известна орбита ИСЗ (вектор r), измерен ρ, то определяется
- 54. Спутники, поддерживающие альтиметрию
- 55. Энвисат (англ. Envisat, Environmental Satellite) — спутник, построенный Европейским Космическим Агентством для исследования Земли из космоса.
- 56. 3.3.5 Радиоинтерферометрия со сверхдлинной базой РСДБ (VLBI) Наблюдаемые объекты: удаленные внегалактические радиоисточники – квазары и радиогалактики
- 57. Навигационная функция (РСДБ) Измеряемая величина: Δt - разность времени между приходом радиосигнала на антенны РСДБ-комплекса: Δt
- 58. РСДБ решаемые задачи: реализация инерциальной небесной системы координат ICRF; реализация инерциальной земной системы координат ITRF. Системы
- 59. Радиоинтерферометрическая сеть "Квазар-КВО", Россия, Институт прикладной астрономии РАН,СПб Обсерватории: Светлое, Зеленчукская, Бадары, Уссурийск Центр обработки информации:
- 60. Радиоастрономическая обсерватория “Светлое”
- 61. Радиоастрономическая обсерватория "Бадары"
- 62. Радиоастрономическая обсерватория “Зеленчукская”
- 63. IVS – Международная РСДБ-служба для геодезии и астрометрии www.ivs.org Основана в 1999 г для поддержки программ
- 64. 3.3.6 Геодезический спутник ГЕО-ИК Назначение создание региональных геодезических сетей работы по изучению топографии Мирового океана уточнение
- 65. ГЕО-ИК-2 Гео-ИК-2 — российская спутниковая система, которая должна была состоять из двух космических аппаратов, предназначенных для
- 66. ГЕО-ИК-2 Предназначение спутниковой системы определение параметров гравитационного поля Земли построение высокоточной геодезической сети в геоцентрической системе
- 67. ГЕО-ИК-2 Оборудование спутника радиовысотомер «Садко» производства Thales Alenia Space; аппаратура доплеровской системы; бортовое синхронизирующее устройство; оптическая
- 68. Продолжение ГЕО-ИК-2 04.06.2016 – Гео-ИК2 №2 (Космос-2517) – запуск с космодрома Плесецк 30.08.2020 - Гео-ИК2 №3
- 69. 3.3.7 Спутниковые радиотехнические навигационные системы второго поколения. Радидальномерные измерения GPS – Global Position System (США) –
- 70. 3.3.7 Радиодальномерные измерения, навигационная функция ρ = ρ(R, R*, Δt,ПВЗ, ГПЗ, ΣΔρ), R – положение пункта
- 71. Три сегмента СРНС
- 72. Системы GPS и ГЛОНАСС
- 73. Международная ГНСС-служба (IGS)
- 74. Международные службы для ITRF
- 76. Скачать презентацию
3.1 Общие определения
Основная задача навигации-
Определение местоположения R (X,Y,Z) и вектора скорости
3.1 Общие определения
Основная задача навигации-
Определение местоположения R (X,Y,Z) и вектора скорости
Три кита, на которых держится навигация:
Геодезия
Опорная система координат
Картография
Астрономия
Основные законы движения светил
Небесная
Три кита, на которых держится навигация:
Геодезия
Опорная система координат
Картография
Астрономия
Основные законы движения светил
Небесная
Общие определения:
В результате решения навигационной задачи получается :
расширенный вектор состояния:
P =
Общие определения:
В результате решения навигационной задачи получается :
расширенный вектор состояния:
P =
Общие определения
Измеряется:
Навигационный параметр НП
ρ – дальность, vr – радиальная скорость
Или радионавигационный
Общие определения
Измеряется:
Навигационный параметр НП
ρ – дальность, vr – радиальная скорость
Или радионавигационный
Общие определения
Поверхность положения – геометрическое место точек с одинаковым значением навигационного
Общие определения
Поверхность положения – геометрическое место точек с одинаковым значением навигационного
Общие определения
Навигационная функция – функциональная связь между расширенным вектором состояния Р
Общие определения
Навигационная функция – функциональная связь между расширенным вектором состояния Р
Что включает в себя расширенный вектор состояния?
Какой навигационный параметр в ГНСС?
Что
Что включает в себя расширенный вектор состояния?
Какой навигационный параметр в ГНСС?
Что
Методы навигации
По наземным ориентирам
Светотехнические (маяки, фонари)
Астрономические
Инерциальные (ИНС)
Радиотехнические наземные
Геотехнические
Методы КГ (радиотехнические: радиодальномерные,
Методы навигации
По наземным ориентирам
Светотехнические (маяки, фонари)
Астрономические
Инерциальные (ИНС)
Радиотехнические наземные
Геотехнические
Методы КГ (радиотехнические: радиодальномерные,
3.2 Инерциальные методы навигации
Автономные средства навигации, на борту самолетов, ракет, КА,
3.2 Инерциальные методы навигации
Автономные средства навигации, на борту самолетов, ракет, КА,
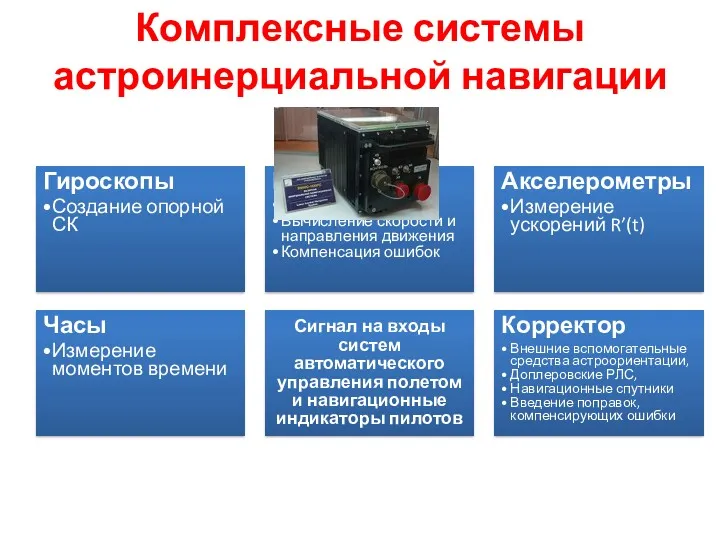
Комплексные системы астроинерциальной навигации
Гироскопы
Создание опорной СК
Компьютер
Интегрирование R’’,
Вычисление скорости и направления
Комплексные системы астроинерциальной навигации
Гироскопы
Создание опорной СК
Компьютер
Интегрирование R’’,
Вычисление скорости и направления
Измеряются:
Направление
(гироскоп, гирокомпас)
Ускорение
(акселерометр)
Время
(часы, стандарт частоты)
Дополнительные данные для коррекции
(навигационные звезды, ГНСС)
Измеряются:
Направление
(гироскоп, гирокомпас)
Ускорение
(акселерометр)
Время
(часы, стандарт частоты)
Дополнительные данные для коррекции
(навигационные звезды, ГНСС)
Измерение ускорений. Колебания М.Шулера. Контур Шулера.
Акселерометр измеряет ускорение:
a’ = a +
Измерение ускорений. Колебания М.Шулера. Контур Шулера.
Акселерометр измеряет ускорение:
a’ = a +
Колебания М.Шулера. Контур Шулера.
Система с обратной связью второго порядка ведет себя
Колебания М.Шулера. Контур Шулера.
Система с обратной связью второго порядка ведет себя

Колебания М.Шулера. Контур Шулера.
+ коррекция кориолисова ускорения
Колебания М.Шулера. Контур Шулера.
+ коррекция кориолисова ускорения
Инерциальные приборы.
Варианты системы. В прежних системах инерциальной навигации опорная система координат
Инерциальные приборы.
Варианты системы. В прежних системах инерциальной навигации опорная система координат
Инерциальные приборы.
Акселерометр. Прибор для измерения ускорений.
Вход в контур Шулера
Инерциальные приборы.
Акселерометр. Прибор для измерения ускорений.
Вход в контур Шулера
Инерциальные приборы.
Гироскоп – для определения ориентировки системы (задание направления координатных осей).
Оптический
Лазерный
Волоконно-оптический
Механический
Вращающийся
Инерциальные приборы.
Гироскоп – для определения ориентировки системы (задание направления координатных осей).
Оптический
Лазерный
Волоконно-оптический
Механический
Вращающийся

Гирокомпас: гироскоп, то есть вращающееся колесо (ротор), установленное в кардановом подвесе,
Гирокомпас: гироскоп, то есть вращающееся колесо (ротор), установленное в кардановом подвесе,

Лазерный гироскоп
Два лазерных луча, генерируемые разрядом между анодами и катодом, распространяются
Лазерный гироскоп
Два лазерных луча, генерируемые разрядом между анодами и катодом, распространяются

Волоконно-оптический гироскоп.
Лазерные лучи распространяются по замкнутому пути, частью которого является
Волоконно-оптический гироскоп.
Лазерные лучи распространяются по замкнутому пути, частью которого является
Достоинства и недостатки инерциальной навигации
Достоинства:
Автономность
Не зависят от погодных условий
Не поддаются
Достоинства и недостатки инерциальной навигации
Достоинства:
Автономность
Не зависят от погодных условий
Не поддаются
Достоинства и недостатки инерциальной навигации
Недостатки:
Необходимость настраивания не только по скорости
Достоинства и недостатки инерциальной навигации
Недостатки:
Необходимость настраивания не только по скорости
Достоинства и недостатки инерциальной навигации
Недостатки:
Накопление ошибки со временем. Накопленную ошибку
Достоинства и недостатки инерциальной навигации
Недостатки:
Накопление ошибки со временем. Накопленную ошибку
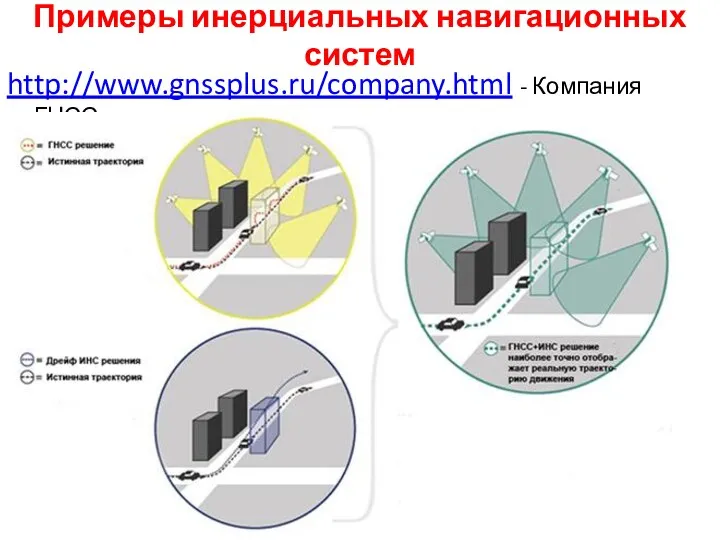
Примеры инерциальных навигационных систем
http://www.gnssplus.ru/company.html - Компания ГНСС+
кинематические измерения линейных объектов, а
Примеры инерциальных навигационных систем
http://www.gnssplus.ru/company.html - Компания ГНСС+
кинематические измерения линейных объектов, а
Примеры инерциальных навигационных систем
СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ (патент РФ
Примеры инерциальных навигационных систем
СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ (патент РФ
Перечислите методы навигации
Что такое счисление пути?
Два основных прибора для инерциальной навигации.
Для
Перечислите методы навигации
Что такое счисление пути?
Два основных прибора для инерциальной навигации.
Для
3.3 Радиотехнические методы навигации
Радиодальномерные (расстояния)
Доплеровские (радиальная скорость)
Наземная навигация
Радиомаяки
Гиперболические системы
3.3 Радиотехнические методы навигации
Радиодальномерные (расстояния)
Доплеровские (радиальная скорость)
Наземная навигация
Радиомаяки
Гиперболические системы
3.3.1 Радиомаяки
На берегу – радиомаяки. Передают радиосигнал (местоположение маяка).
На корабле: радипеленгатор.
3.3.1 Радиомаяки
На берегу – радиомаяки. Передают радиосигнал (местоположение маяка).
На корабле: радипеленгатор.
3.3.2 Гиперболические системы
(наземные)
Измеряется разность времени прихода сигналов от двух разнесенных в
3.3.2 Гиперболические системы
(наземные)
Измеряется разность времени прихода сигналов от двух разнесенных в
Гиперболические системы
Низкие частоты, длинные волны, огибание поверхности Земли, -
Нет ограничения на
Гиперболические системы
Низкие частоты, длинные волны, огибание поверхности Земли, -
Нет ограничения на

Разностно-дальномерная система «ЛОРАН-С»
Стандартная система для судоходства США
Разностно-дальномерная система «ЛОРАН-С»
Стандартная система для судоходства США

Фазовая гиперболическая радионавигационная система «Омега» (OMEGA).
Фазовая гиперболическая радионавигационная система «Омега» (OMEGA).

«Чайка» — импульсно-фазовая радионавигационная система длинноволнового диапазона, предназначенная для определения координат
«Чайка» — импульсно-фазовая радионавигационная система длинноволнового диапазона, предназначенная для определения координат
Современные наземные радионавигационные системы
1. eLORAN – «улучшенная наземная система навигации США»
Современные наземные радионавигационные системы
1. eLORAN – «улучшенная наземная система навигации США»
Принцип навигации по радиомаякам.
Принцип навигации в гиперболических системах
Точность и дальнодействие гиперболических
Принцип навигации по радиомаякам.
Принцип навигации в гиперболических системах
Точность и дальнодействие гиперболических
3.3.3 Доплеровские системы
Эффект Доплера: изменение частоты принимаемого сигнала при движении источника
3.3.3 Доплеровские системы
Эффект Доплера: изменение частоты принимаемого сигнала при движении источника
Навигационная функция
(доплеровские системы)
Vr = Vr(R, R*, ГПЗ,ПВЗ, ΣΔρ),
R – положение
Навигационная функция
(доплеровские системы)
Vr = Vr(R, R*, ГПЗ,ПВЗ, ΣΔρ),
R – положение
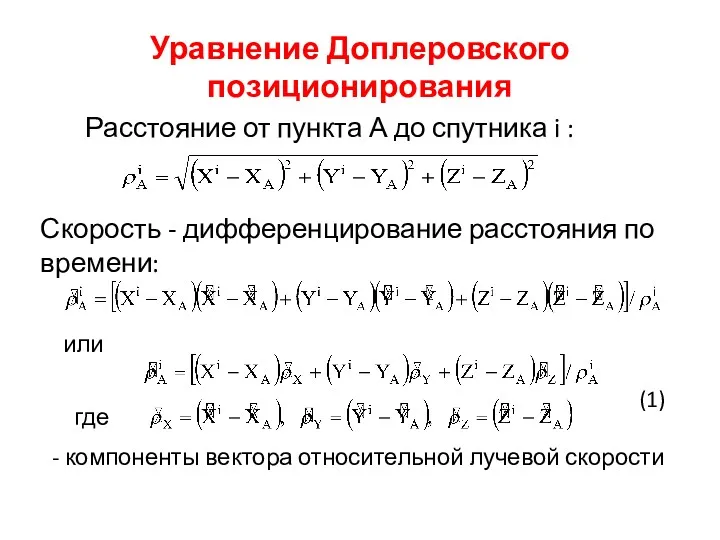
Уравнение Доплеровского позиционирования
Расстояние от пункта А до спутника i :
Скорость
Уравнение Доплеровского позиционирования
Расстояние от пункта А до спутника i :
Скорость
Доплеровские спутниковые системы
ГНСС первого поколения:
TRANZIT (США), ЦИКАДА (СССР)
Определение
Доплеровские спутниковые системы
ГНСС первого поколения:
TRANZIT (США), ЦИКАДА (СССР)
Определение

ГНСС первого поколения
TRANZIT и ЦИКАДА
В СССР в 1984-1993 гг создана
ГНСС первого поколения
TRANZIT и ЦИКАДА
В СССР в 1984-1993 гг создана
Доплеровские спутниковые системы
PRARE (Германия)
DORIS (Франция)
Определение орбит ИСЗ (координат спутника Xi,
Доплеровские спутниковые системы
PRARE (Германия)
DORIS (Франция)
Определение орбит ИСЗ (координат спутника Xi,
PRARE – Precise Range And Range-Rate Equipment
Работа системы – 1982 –
PRARE – Precise Range And Range-Rate Equipment
Работа системы – 1982 –

Спутник системы PRARE ERS-2
Спутник системы PRARE ERS-2
DORIS – Doppler Orbitography and Radiopositioning Integrated by Satellite
DORIS – Doppler Orbitography and Radiopositioning Integrated by Satellite
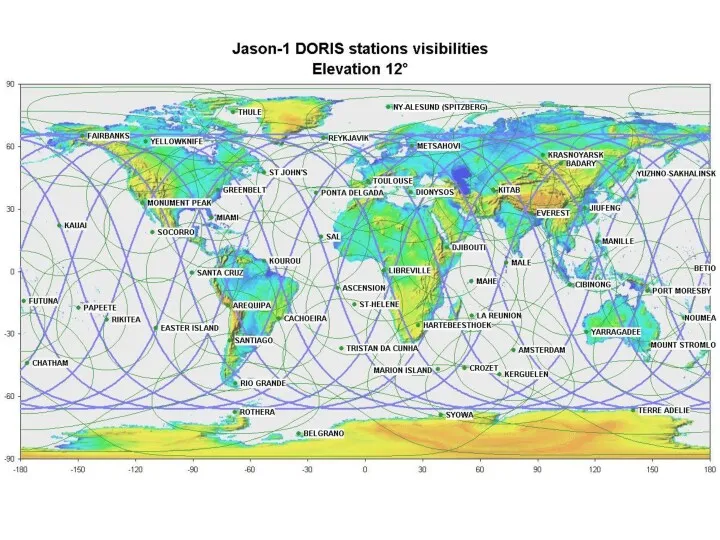
Задачи, решаемые с помощью DORIS, PRARE
Точное определение орбит ИСЗ;
Определение координат и
Задачи, решаемые с помощью DORIS, PRARE
Точное определение орбит ИСЗ;
Определение координат и
IDS – International DORIS Service
http://www.ids-doris.org/
IDS – International DORIS Service
http://www.ids-doris.org/
3.3.4 Спутниковая альтиметрия
(измерение расстояния от ИСЗ до поверхности океана)
Радиовысотомер: высокочастотные
3.3.4 Спутниковая альтиметрия
(измерение расстояния от ИСЗ до поверхности океана)
Радиовысотомер: высокочастотные

Векторное уравнение
спутниковой альтиметрии
R = r + ρ
Векторное уравнение
спутниковой альтиметрии
R = r + ρ
Навигационная функция
(альтиметрия)
ρ= ρ(геоид, R*, ΣΔρ),
R* - положение спутника
ΣΔρ - сумма
Навигационная функция
(альтиметрия)
ρ= ρ(геоид, R*, ΣΔρ),
R* - положение спутника
ΣΔρ - сумма
Задачи, решаемые с помощью спутниковой альтиметрии
Если известна орбита ИСЗ (вектор r),
Задачи, решаемые с помощью спутниковой альтиметрии
Если известна орбита ИСЗ (вектор r),

Спутники, поддерживающие альтиметрию
Спутники, поддерживающие альтиметрию
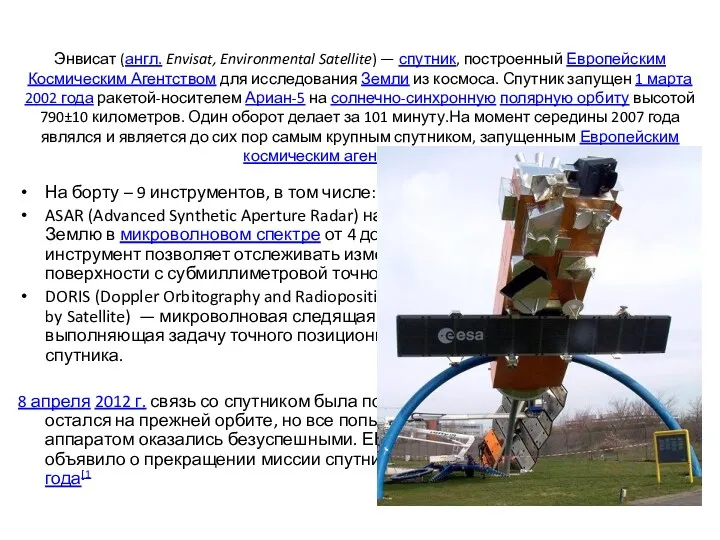
Энвисат (англ. Envisat, Environmental Satellite) — спутник, построенный Европейским Космическим Агентством для исследования
Энвисат (англ. Envisat, Environmental Satellite) — спутник, построенный Европейским Космическим Агентством для исследования
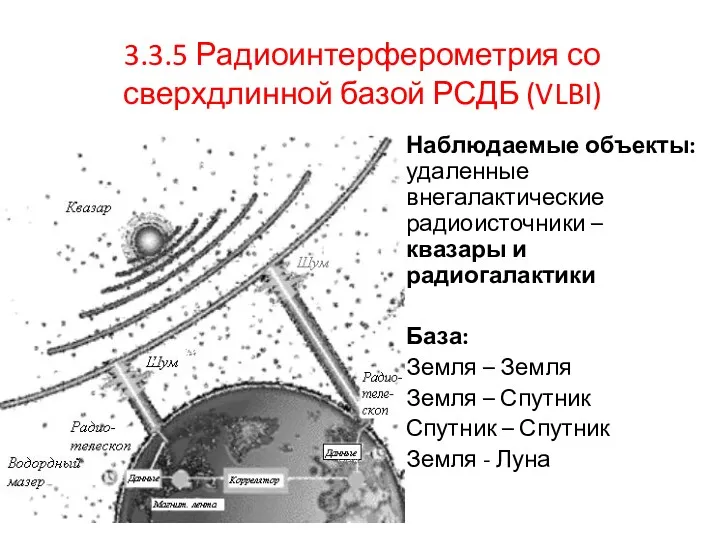
3.3.5 Радиоинтерферометрия со сверхдлинной базой РСДБ (VLBI)
Наблюдаемые объекты:
удаленные внегалактические радиоисточники –
3.3.5 Радиоинтерферометрия со сверхдлинной базой РСДБ (VLBI)
Наблюдаемые объекты:
удаленные внегалактические радиоисточники –
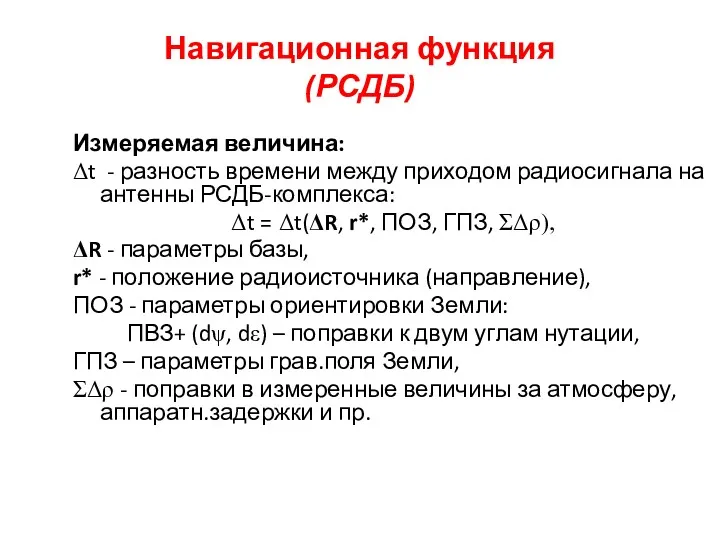
Навигационная функция
(РСДБ)
Измеряемая величина:
Δt - разность времени между приходом радиосигнала на антенны
Навигационная функция
(РСДБ)
Измеряемая величина:
Δt - разность времени между приходом радиосигнала на антенны
РСДБ
решаемые задачи:
реализация инерциальной небесной системы координат ICRF;
реализация инерциальной земной системы
РСДБ
решаемые задачи:
реализация инерциальной небесной системы координат ICRF;
реализация инерциальной земной системы

Радиоинтерферометрическая сеть
"Квазар-КВО", Россия, Институт прикладной астрономии РАН,СПб
Обсерватории:
Светлое,
Зеленчукская,
Бадары,
Уссурийск
Центр обработки информации:
ИПА
Радиоинтерферометрическая сеть
"Квазар-КВО", Россия, Институт прикладной астрономии РАН,СПб
Обсерватории:
Светлое,
Зеленчукская,
Бадары,
Уссурийск
Центр обработки информации:
ИПА

Радиоастрономическая обсерватория “Светлое”
Радиоастрономическая обсерватория “Светлое”

Радиоастрономическая обсерватория "Бадары"
Радиоастрономическая обсерватория "Бадары"

Радиоастрономическая обсерватория “Зеленчукская”
Радиоастрономическая обсерватория “Зеленчукская”
IVS – Международная РСДБ-служба для геодезии и астрометрии www.ivs.org
Основана в
IVS – Международная РСДБ-служба для геодезии и астрометрии www.ivs.org
Основана в

3.3.6 Геодезический спутник ГЕО-ИК
Назначение
создание региональных геодезических сетей
работы по изучению
3.3.6 Геодезический спутник ГЕО-ИК
Назначение
создание региональных геодезических сетей
работы по изучению
ГЕО-ИК-2
Гео-ИК-2 — российская спутниковая система, которая должна была состоять из двух
ГЕО-ИК-2
Гео-ИК-2 — российская спутниковая система, которая должна была состоять из двух
ГЕО-ИК-2
Предназначение спутниковой системы
определение параметров гравитационного поля Земли
построение высокоточной геодезической сети в
ГЕО-ИК-2
Предназначение спутниковой системы
определение параметров гравитационного поля Земли
построение высокоточной геодезической сети в
ГЕО-ИК-2
Оборудование спутника
радиовысотомер «Садко» производства Thales Alenia Space;
аппаратура доплеровской системы;
бортовое синхронизирующее устройство;
оптическая
ГЕО-ИК-2
Оборудование спутника
радиовысотомер «Садко» производства Thales Alenia Space;
аппаратура доплеровской системы;
бортовое синхронизирующее устройство;
оптическая
Продолжение ГЕО-ИК-2
04.06.2016 – Гео-ИК2 №2 (Космос-2517) – запуск с космодрома Плесецк
30.08.2020
Продолжение ГЕО-ИК-2
04.06.2016 – Гео-ИК2 №2 (Космос-2517) – запуск с космодрома Плесецк
30.08.2020
3.3.7 Спутниковые радиотехнические навигационные системы второго поколения. Радидальномерные измерения
GPS –
3.3.7 Спутниковые радиотехнические навигационные системы второго поколения. Радидальномерные измерения
GPS –
3.3.7 Радиодальномерные измерения,
навигационная функция
ρ = ρ(R, R*, Δt,ПВЗ, ГПЗ, ΣΔρ),
R –
3.3.7 Радиодальномерные измерения,
навигационная функция
ρ = ρ(R, R*, Δt,ПВЗ, ГПЗ, ΣΔρ),
R –
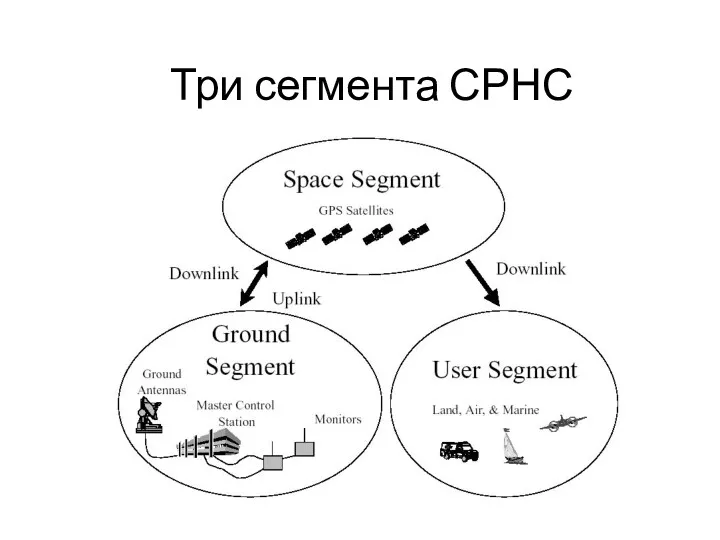
Три сегмента СРНС
Три сегмента СРНС

Системы GPS и ГЛОНАСС
Системы GPS и ГЛОНАСС
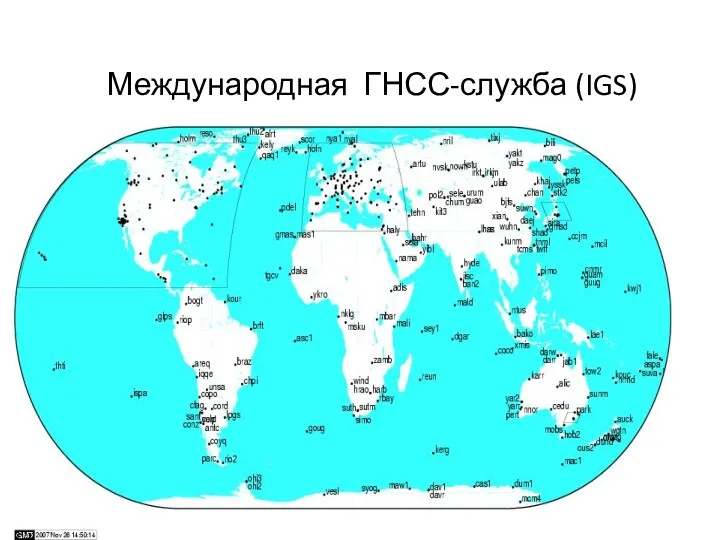
Международная ГНСС-служба (IGS)
Международная ГНСС-служба (IGS)
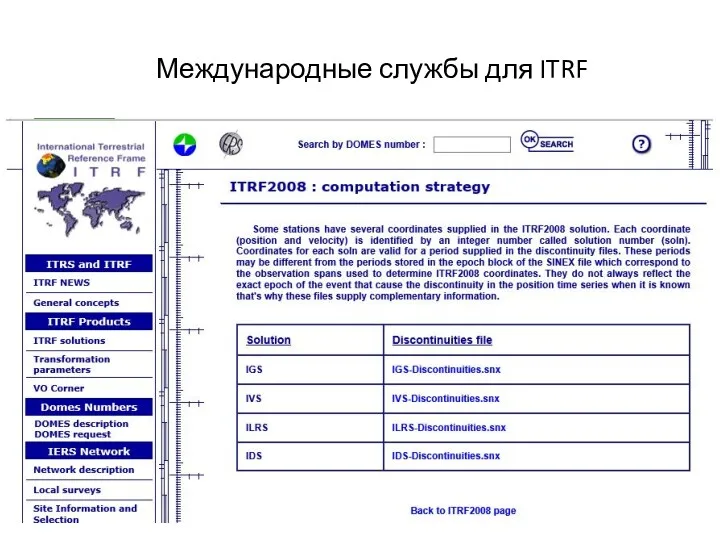
Международные службы для ITRF
Международные службы для ITRF
 Формирование эстетического отношения к науке на уроках естественного цикла
Формирование эстетического отношения к науке на уроках естественного цикла Технология сборки и сварки металлической скамейки
Технология сборки и сварки металлической скамейки Компактные фотоаппараты Lumix
Компактные фотоаппараты Lumix Болезни плодово-ягодных культур
Болезни плодово-ягодных культур Связь метеорологических наблюдений и исследований с проблемами ззагрязнения окружающей среды
Связь метеорологических наблюдений и исследований с проблемами ззагрязнения окружающей среды Основные определения и свойства функций
Основные определения и свойства функций Grammar A2+articles
Grammar A2+articles Чудеса на песке
Чудеса на песке Проект гидравлического привода прижимного ролика агрегата осмотра и зачистки слябов в прокатном цехе №5 ОАО ЧМК
Проект гидравлического привода прижимного ролика агрегата осмотра и зачистки слябов в прокатном цехе №5 ОАО ЧМК Классный час Мы - за здоровый образ жизни!
Классный час Мы - за здоровый образ жизни! 20240201_prezentatsiya
20240201_prezentatsiya Синтез дискретных систем методом желаемых частотных характеристик
Синтез дискретных систем методом желаемых частотных характеристик Толерантность - путь к культуре мира.
Толерантность - путь к культуре мира. интерактивная игра Яркие краски детства
интерактивная игра Яркие краски детства Религия. Тотемизм
Религия. Тотемизм Профилактика дефицита железа у детей раннего возраста
Профилактика дефицита железа у детей раннего возраста Инвестиционная деятельность предприятия ПАО КАМАЗ Автомобильный завод
Инвестиционная деятельность предприятия ПАО КАМАЗ Автомобильный завод Общие принципы проектирования железобетонных конструкций зданий
Общие принципы проектирования железобетонных конструкций зданий Технология контактной конденсаторной сварки. (Лекция 10)
Технология контактной конденсаторной сварки. (Лекция 10) Презентация Решение задач на движение
Презентация Решение задач на движение М.В. Ломоносов. Исследования в области географии и метеорологии
М.В. Ломоносов. Исследования в области географии и метеорологии Николай Васильевич Гоголь. Комедия Ревизор. Фон и красный цвет текста неудачные
Николай Васильевич Гоголь. Комедия Ревизор. Фон и красный цвет текста неудачные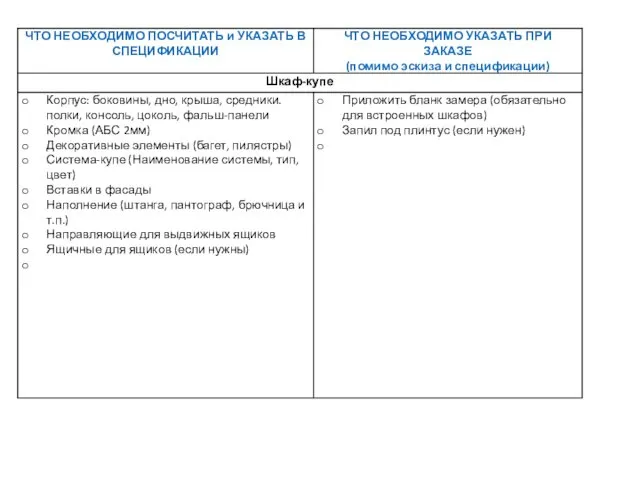 Шкаф-купе. Спецификации
Шкаф-купе. Спецификации Картотека физминуток - младший дошкольный возраст
Картотека физминуток - младший дошкольный возраст Сирингомиелия. Классификация
Сирингомиелия. Классификация Исследование факторов развития жилищного строительства в регионе (на примере Кемеровской области)
Исследование факторов развития жилищного строительства в регионе (на примере Кемеровской области) Фазы медиации: прошлое-настоящее-будущее
Фазы медиации: прошлое-настоящее-будущее Викторина по сказке Александра Волкова Волшебник Изумрудного города
Викторина по сказке Александра Волкова Волшебник Изумрудного города