- Методы передачи данных в компьютерных сетях. Лекция 15

Содержание
- 2. Существуют два способа передачи слов информации по линиям данных: параллельный, когда одновременно пересылаются все биты слова,
- 3. При последовательном обмене данными используются три метода передачи данных: симплексная (однонаправленная) передача (телевидение, радио); полудуплексная (прием
- 4. Для передачи данных в сетях наиболее часто применяется последовательная передача. Широко используются следующие методы последовательной передачи:
- 5. Суть асинхронного принципа состоит в независимой (полностью или частично) работе (по времени) передатчика и приемника, управляемой
- 6. Уровень логической единицы в линии называют маркером, уровень логического нуля - пробелом. При отсутствии данных в
- 7. Устройство, обеспечивающее преобразование данных из параллельной формы в последовательную и обратно и обеспечивает асинхронный протокол обмена
- 8. Рисунок 9 - Извлечение синхросигнала. Рисунок 10 - Временная диаграмма работы приемника UART
- 9. В схеме можно выделить 4 основные части: приёмную, передающую, регистр состояния и блок управления. Рисунок 11
- 10. Рисунок 12 - Контроллер последовательной асинхронной передачи Процесс передачи байта данных начинается с того, что процессор,
- 11. На выходной линии контроллера "Данные" поддерживается состояние 0 (значение стартового бита) до тех пор, пока не
- 12. Рисунок 13 - Контроллер последовательного асинхронного приема Уровень логической единицы поступает по линии "Данные" в контроллер
- 13. В момент смены стопового бита на стартовый бит (момент начала передачи нового кадра) на линии "Данные"
- 14. Преимущества: несложная отработанная система; недорогое интерфейсное оборудование. Недостатки асинхронной передачи: третья часть пропускной способности теряется на
- 15. Рекомендованный стандарт RS232 Интерфейс между терминалом данных и передающим оборудованием линии связи, применяющий последовательный обмен двоичными
- 16. RS-232 (Recommended Standard 232) - стандарт описывающий интерфейс для последовательной двунаправленной передачи данных между терминалом (DTE,
- 17. Оригинальная часть стандарта RS-232 содержит шесть секций. 1. Область применения. 2. Характеристики сигнала. 3. Механические характеристики
- 18. Характеристики сигналов RS-232 Рис.1 Эквивалентная электрическая схема RS-232C V0 - напряжение генератора при разомкнутой схеме R0
- 19. Рис.2 Практическая схема стыка интерфейса RS-232C Электрические характеристики генератора сигналов Допускается короткое замыкание сигналов. Допускается оставлять
- 20. Рис.3 Уровни сигналов RS-232C на передающем и принимающем концах линии связи. Уровни сигналов для стандарта RS-232C
- 21. Механические характеристики интерфейса. Разъем для интерфейса стандарта RS-232 В качестве разъема для интерфейса RS-232C выбран миниатюрный
- 22. Назначение сигналов СОМ порта по стандарту RS-232C
- 23. Организация обмена данных при аппаратном режиме синхронизации. Аппаратный режим синхронизации обмена данными RTS/CTS (hardware flow control)
- 24. Соединительные кабели Нуль модемные кабели RS-232 3-проводный минимальный При таком соединении компьютеры (терминалы) соединяются между собой
- 25. Так как режим синхронизации обмена на СОМ портах может быть включен, то часто сервисные сигналы СОМ
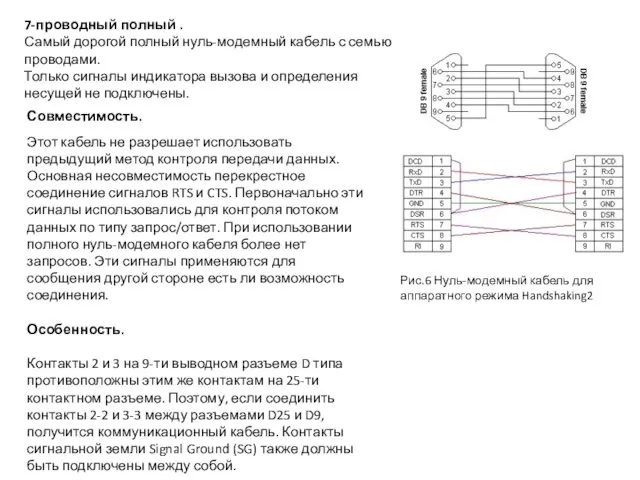
- 26. Совместимость. Этот кабель не разрешает использовать предыдущий метод контроля передачи данных. Основная несовместимость перекрестное соединение сигналов
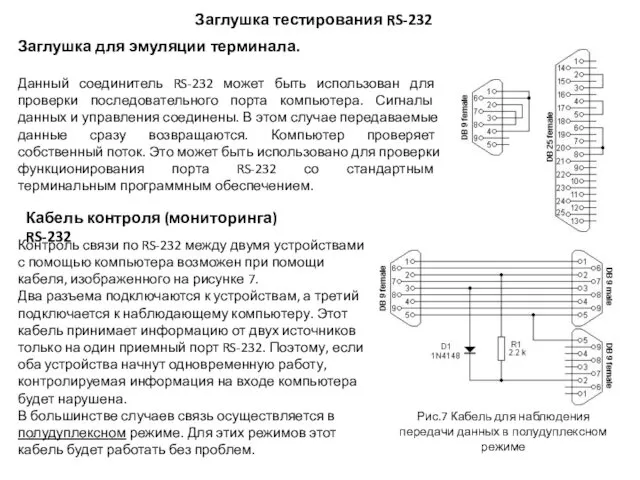
- 27. Заглушка для эмуляции терминала. Данный соединитель RS-232 может быть использован для проверки последовательного порта компьютера. Сигналы
- 28. Длина кабеля. Длина кабеля влияет на максимальную скорость передачи информации. Более длинный кабель имеет большую емкость
- 29. При передаче по последовательному каналу контроль четности может быть использован для обнаружения ошибок при передаче данных.
- 30. Пример. В этом примере показана структура передаваемых данных со синхронизирующим тактовым сигналом. В этом примере используется
- 31. Техническая документация. Семейство микросхем MAX220-MAX249 линейных приемо-передатчиков предназначены для интерфейсов EIA/TIA-232E и V.28/V.24, особенно в устройствах,
- 32. Рис.9 Типовая схема включения MAX232 Рис.9 Подключение MAX232 к микроконтроллеру ATmega128
- 34. Скачать презентацию
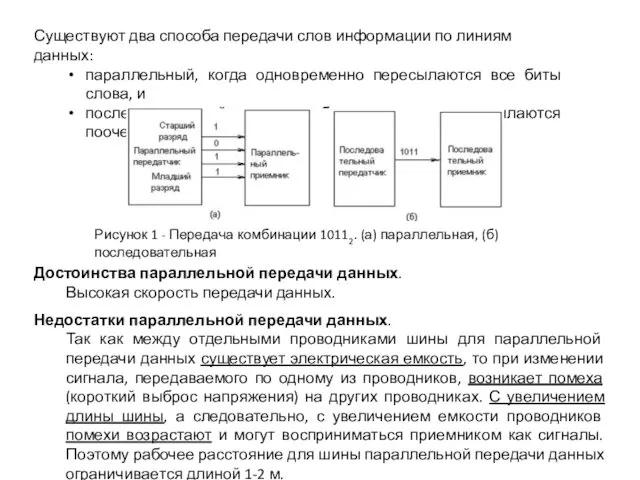
Существуют два способа передачи слов информации по линиям данных:
параллельный, когда
Существуют два способа передачи слов информации по линиям данных:
параллельный, когда
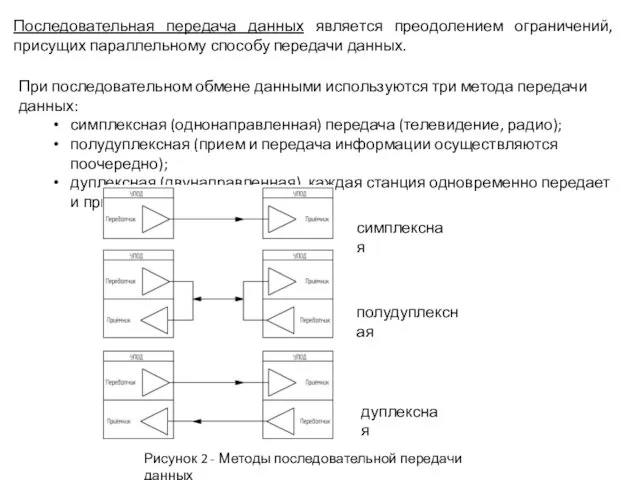
При последовательном обмене данными используются три метода передачи данных:
симплексная (однонаправленная) передача
При последовательном обмене данными используются три метода передачи данных:
симплексная (однонаправленная) передача
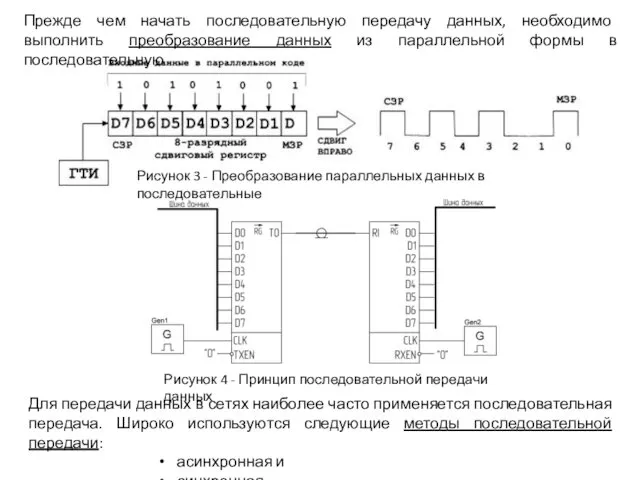
Для передачи данных в сетях наиболее часто применяется последовательная передача. Широко
Для передачи данных в сетях наиболее часто применяется последовательная передача. Широко
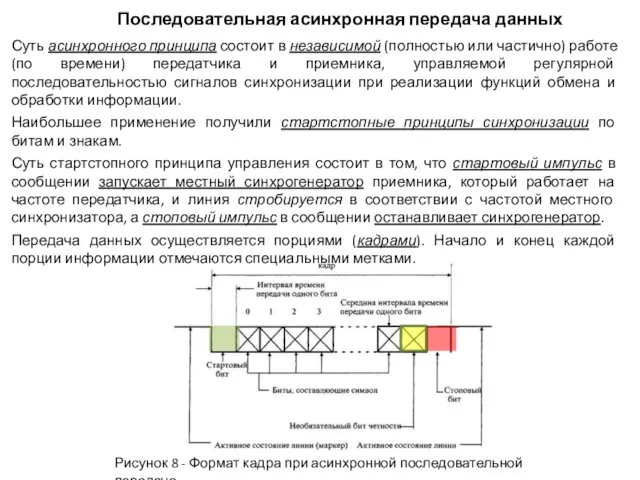
Суть асинхронного принципа состоит в независимой (полностью или частично) работе (по
Суть асинхронного принципа состоит в независимой (полностью или частично) работе (по
Уровень логической единицы в линии называют маркером,
уровень логического нуля -
Уровень логической единицы в линии называют маркером,
уровень логического нуля -
Устройство, обеспечивающее преобразование данных из параллельной формы в последовательную и обратно
Устройство, обеспечивающее преобразование данных из параллельной формы в последовательную и обратно
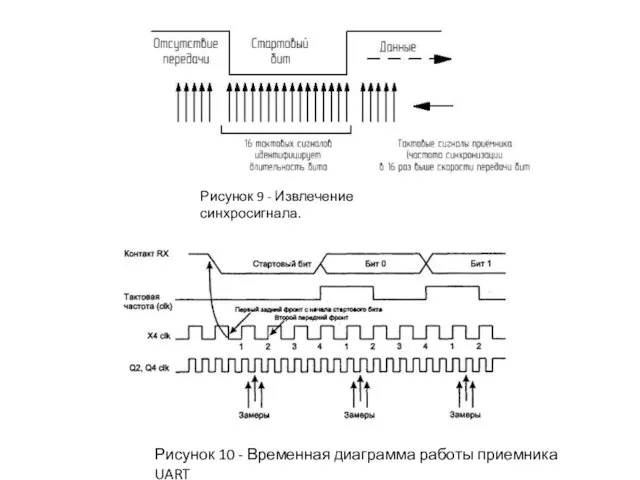
Рисунок 9 - Извлечение синхросигнала.
Рисунок 10 - Временная диаграмма работы
Рисунок 9 - Извлечение синхросигнала.
Рисунок 10 - Временная диаграмма работы
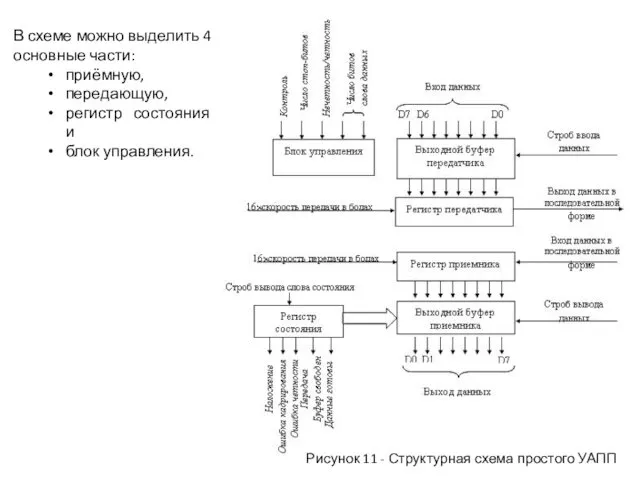
В схеме можно выделить 4 основные части:
приёмную,
передающую,
регистр состояния
В схеме можно выделить 4 основные части:
приёмную,
передающую,
регистр состояния
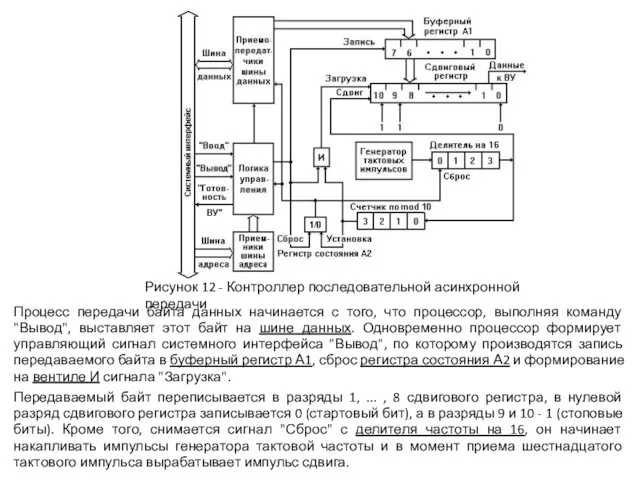
Рисунок 12 - Контроллер последовательной асинхронной передачи
Процесс передачи байта данных начинается
Рисунок 12 - Контроллер последовательной асинхронной передачи
Процесс передачи байта данных начинается
На выходной линии контроллера "Данные" поддерживается состояние 0 (значение стартового бита)
На выходной линии контроллера "Данные" поддерживается состояние 0 (значение стартового бита)
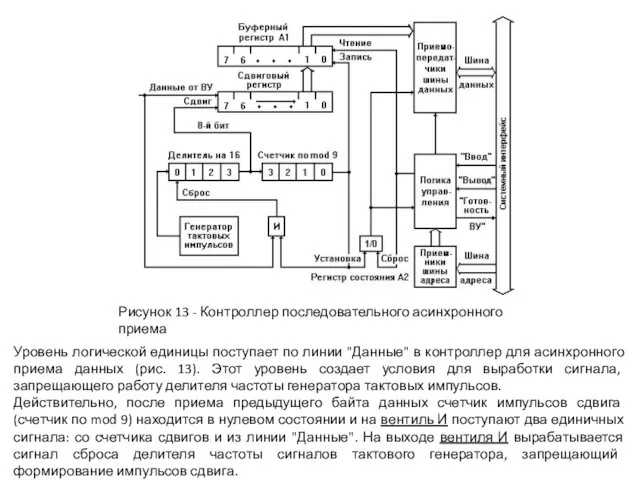
Рисунок 13 - Контроллер последовательного асинхронного приема
Уровень логической единицы поступает по
Рисунок 13 - Контроллер последовательного асинхронного приема
Уровень логической единицы поступает по
В момент смены стопового бита на стартовый бит (момент начала передачи
В момент смены стопового бита на стартовый бит (момент начала передачи
Преимущества:
несложная отработанная система;
недорогое интерфейсное оборудование.
Недостатки асинхронной передачи:
третья часть
Преимущества:
несложная отработанная система;
недорогое интерфейсное оборудование.
Недостатки асинхронной передачи:
третья часть
Рекомендованный стандарт RS232
Интерфейс между терминалом данных и передающим оборудованием линии
Рекомендованный стандарт RS232
Интерфейс между терминалом данных и передающим оборудованием линии
RS-232 (Recommended Standard 232) - стандарт описывающий интерфейс для последовательной двунаправленной
RS-232 (Recommended Standard 232) - стандарт описывающий интерфейс для последовательной двунаправленной
Оригинальная часть стандарта RS-232 содержит шесть секций.
1. Область применения.
Оригинальная часть стандарта RS-232 содержит шесть секций.
1. Область применения.

Характеристики сигналов RS-232
Рис.1 Эквивалентная электрическая схема RS-232C
V0 - напряжение генератора при
Характеристики сигналов RS-232
Рис.1 Эквивалентная электрическая схема RS-232C
V0 - напряжение генератора при
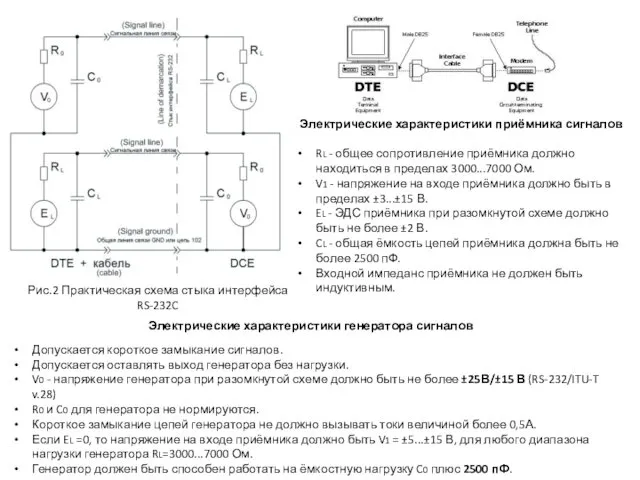
Рис.2 Практическая схема стыка интерфейса RS-232C
Электрические характеристики генератора сигналов
Допускается короткое
Рис.2 Практическая схема стыка интерфейса RS-232C
Электрические характеристики генератора сигналов
Допускается короткое
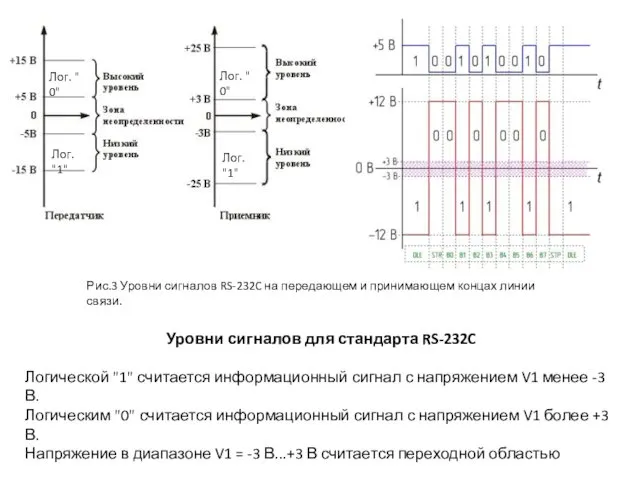
Рис.3 Уровни сигналов RS-232C на передающем и принимающем концах линии связи.
Уровни
Рис.3 Уровни сигналов RS-232C на передающем и принимающем концах линии связи.
Уровни

Механические характеристики интерфейса.
Разъем для интерфейса стандарта RS-232
В качестве разъема для
Механические характеристики интерфейса.
Разъем для интерфейса стандарта RS-232
В качестве разъема для

Назначение сигналов СОМ порта по стандарту RS-232C
Назначение сигналов СОМ порта по стандарту RS-232C
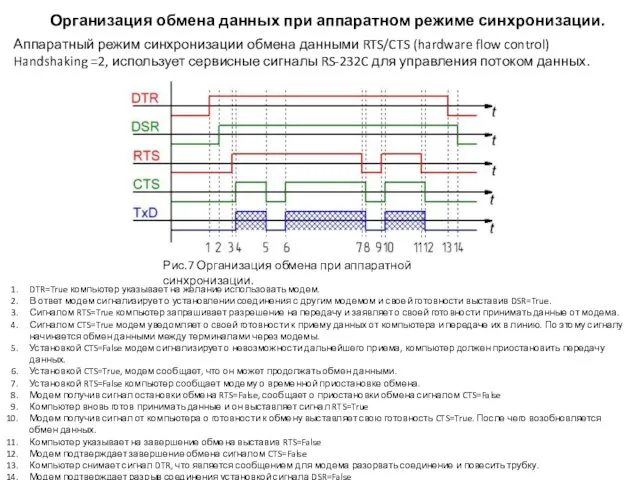
Организация обмена данных при аппаратном режиме синхронизации.
Аппаратный режим синхронизации обмена данными
Организация обмена данных при аппаратном режиме синхронизации.
Аппаратный режим синхронизации обмена данными
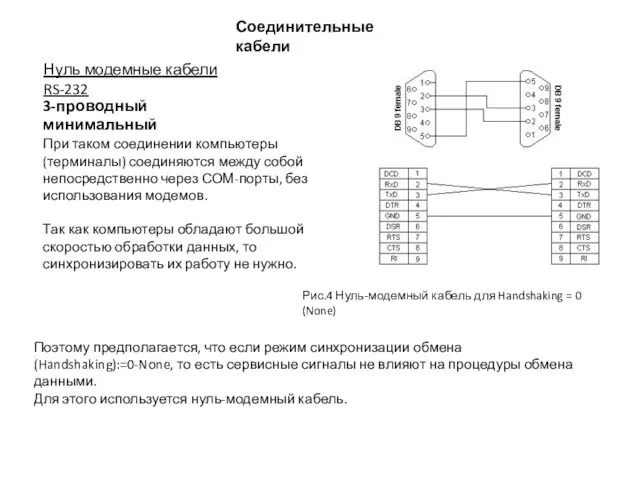
Соединительные кабели
Нуль модемные кабели RS-232
3-проводный минимальный
При таком соединении компьютеры (терминалы) соединяются
Соединительные кабели
Нуль модемные кабели RS-232
3-проводный минимальный
При таком соединении компьютеры (терминалы) соединяются
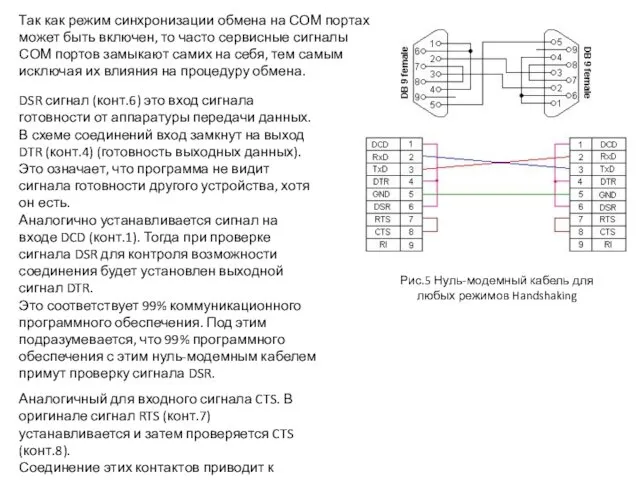
Так как режим синхронизации обмена на СОМ портах может быть включен,
Так как режим синхронизации обмена на СОМ портах может быть включен,
Совместимость.
Этот кабель не разрешает использовать предыдущий метод контроля передачи данных. Основная
Совместимость.
Этот кабель не разрешает использовать предыдущий метод контроля передачи данных. Основная
Заглушка для эмуляции терминала.
Данный соединитель RS-232 может быть использован для проверки
Заглушка для эмуляции терминала.
Данный соединитель RS-232 может быть использован для проверки
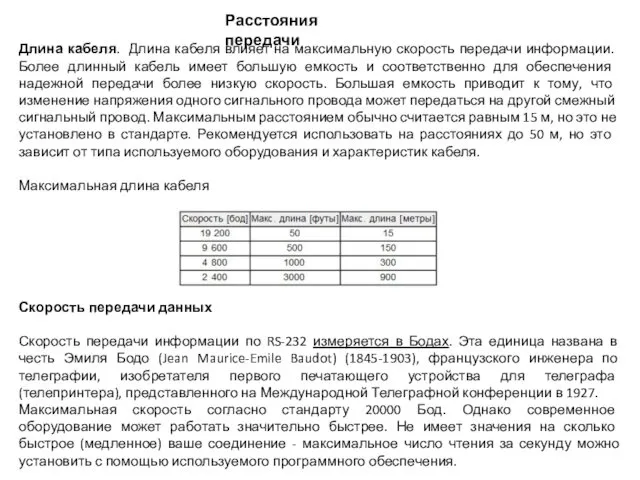
Длина кабеля. Длина кабеля влияет на максимальную скорость передачи информации. Более
При передаче по последовательному каналу контроль четности может быть использован для
При передаче по последовательному каналу контроль четности может быть использован для
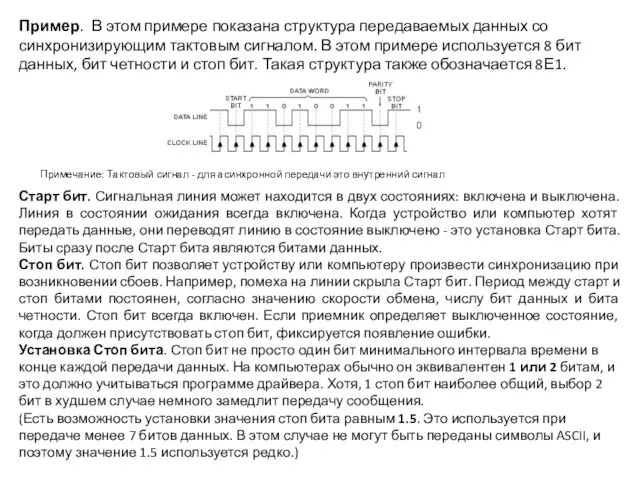
Пример. В этом примере показана структура передаваемых данных со синхронизирующим тактовым
Пример. В этом примере показана структура передаваемых данных со синхронизирующим тактовым

Техническая документация. Семейство микросхем MAX220-MAX249 линейных приемо-передатчиков предназначены для интерфейсов EIA/TIA-232E
Техническая документация. Семейство микросхем MAX220-MAX249 линейных приемо-передатчиков предназначены для интерфейсов EIA/TIA-232E
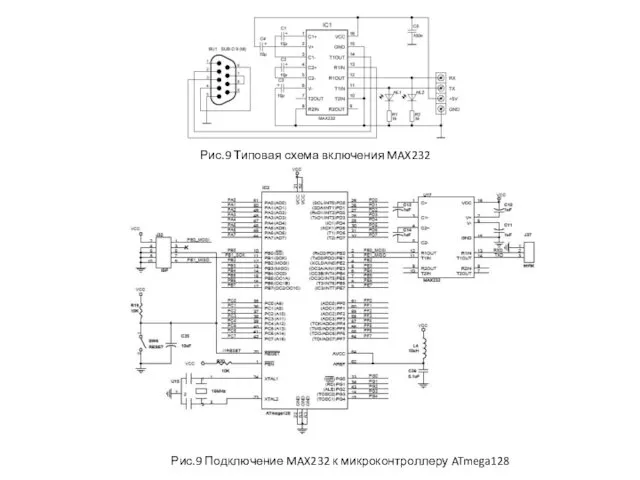
Рис.9 Типовая схема включения MAX232
Рис.9 Подключение MAX232 к микроконтроллеру ATmega128
Рис.9 Типовая схема включения MAX232
Рис.9 Подключение MAX232 к микроконтроллеру ATmega128
 Проектная деятельность на тему: Грибное лукошко
Проектная деятельность на тему: Грибное лукошко Riki.team. Рекомендации по работе над презентацией
Riki.team. Рекомендации по работе над презентацией Презентация к деловой игре Туризм и математика
Презентация к деловой игре Туризм и математика Река Нил
Река Нил Итоги деятельности АОГидропроект за 2018 год
Итоги деятельности АОГидропроект за 2018 год Методы оптимизации. Методы последовательного поиска. Метод дихотомии
Методы оптимизации. Методы последовательного поиска. Метод дихотомии Презентация родительского собрания
Презентация родительского собрания Семейный праздник 23 + 8 (2 класс)
Семейный праздник 23 + 8 (2 класс) Family members
Family members Анксиолитики. Тревожные расстройства
Анксиолитики. Тревожные расстройства Kim jestem w perspektywie Bożego planu?
Kim jestem w perspektywie Bożego planu? Субсидии и ВТО
Субсидии и ВТО Металлические сплавы
Металлические сплавы Энергетический обмен в клетке. Клеточное дыхание. Этапы клеточного дыхания
Энергетический обмен в клетке. Клеточное дыхание. Этапы клеточного дыхания Функции. Различные способы задания функции
Функции. Различные способы задания функции Как подобрать породу собаки
Как подобрать породу собаки Вот со звуком [Л] считалка...
Вот со звуком [Л] считалка... Наследие Древнего Востока. Здесь раскрываются тайны Древнего Востока
Наследие Древнего Востока. Здесь раскрываются тайны Древнего Востока Ярослав Гашек Камень жизни
Ярослав Гашек Камень жизни Крупы - Cereals
Крупы - Cereals Крым и Севастополь
Крым и Севастополь Классификация туберкулеза (клиническая, международная), современные подходы к типированию больных
Классификация туберкулеза (клиническая, международная), современные подходы к типированию больных Социальная сфера жизни общества
Социальная сфера жизни общества Наши банки-ваш выбор. Сеть Ренессанс Кредит
Наши банки-ваш выбор. Сеть Ренессанс Кредит My name is Denis
My name is Denis Расчет состава цементобетонной смеси методом абсолютных объёмов
Расчет состава цементобетонной смеси методом абсолютных объёмов Україна (укр. Україна [ukrɑˈjinɑ]) — держава у Східній Європі
Україна (укр. Україна [ukrɑˈjinɑ]) — держава у Східній Європі День службы пожарной охраны России
День службы пожарной охраны России