Содержание
- 2. Сервопривод Сервопривод (следящий привод) — привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами
- 3. Сервопривод Сервоприводом является любой тип механического привода, имеющий в составе датчик и блок управления приводом, автоматически
- 4. Функции библиотеки Servo Стандартная библиотека Servo позволяет осуществлять программное управление сервоприводами. Для этого вводится переменная типа
- 5. Функции библиотеки Servo write – отдает команду сервоприводу принять некоторое значение параметров. Синтаксис: servo.write(angle), где angle
- 6. Функции библиотеки Servo read – читает значение угла, в котором находится сервопривод. Синтаксис: servo.read возвращает целое
- 7. Задача 1 Подключить сервопривод и с дискретностью 2,5 секунды заставить его принимать крайние положения. Реализовать два
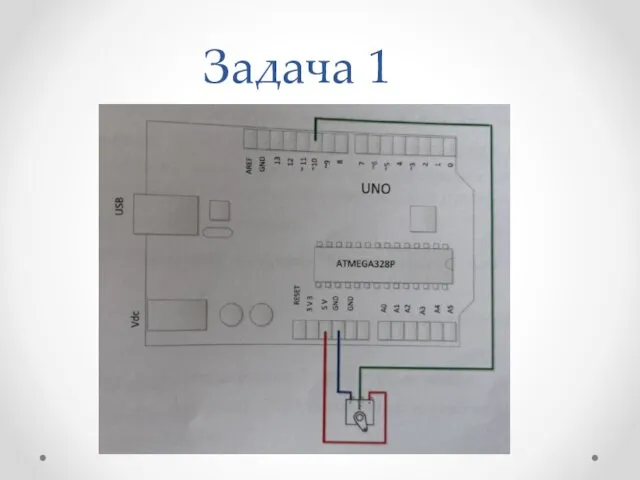
- 8. Задача 1
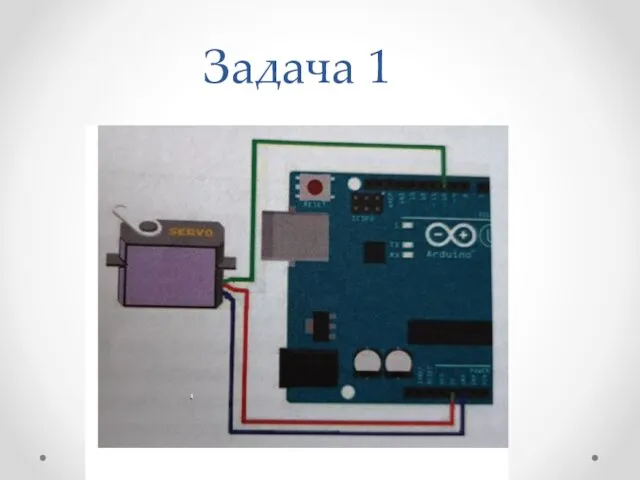
- 9. Задача 1
- 10. Задача 2 Необходимо поворачивать сервопривод из одного крайнего положения в другое по показаниям ИК-датчика. При нахождении
- 12. Скачать презентацию

Сервопривод
Сервопривод (следящий привод) — привод с управлением через отрицательную обратную связь,
Сервопривод
Сервопривод (следящий привод) — привод с управлением через отрицательную обратную связь,
Сервопривод
Сервоприводом является любой тип механического привода, имеющий в составе датчик и
Сервопривод
Сервоприводом является любой тип механического привода, имеющий в составе датчик и
Функции библиотеки Servo
Стандартная библиотека Servo позволяет осуществлять программное управление сервоприводами. Для
Функции библиотеки Servo
Стандартная библиотека Servo позволяет осуществлять программное управление сервоприводами. Для
Функции библиотеки Servo
write – отдает команду сервоприводу принять некоторое значение параметров.
Синтаксис:
Функции библиотеки Servo
write – отдает команду сервоприводу принять некоторое значение параметров.
Синтаксис:
Функции библиотеки Servo
read – читает значение угла, в котором находится сервопривод.
Синтаксис:
Функции библиотеки Servo
read – читает значение угла, в котором находится сервопривод.
Синтаксис:
Задача 1
Подключить сервопривод и с дискретностью 2,5 секунды заставить его принимать
Задача 1
Подключить сервопривод и с дискретностью 2,5 секунды заставить его принимать
Задача 1
Задача 1
Задача 1
Задача 1
Задача 2
Необходимо поворачивать сервопривод из одного крайнего положения в другое по
Задача 2
Необходимо поворачивать сервопривод из одного крайнего положения в другое по
 Санаторно-курортное лечение: принципы организации и порядок предоставления
Санаторно-курортное лечение: принципы организации и порядок предоставления Жизнь в моем городе в прошлом веке
Жизнь в моем городе в прошлом веке Портфолио студентки Конькиной Полины Сергеевны. Колледж Петербургской моды
Портфолио студентки Конькиной Полины Сергеевны. Колледж Петербургской моды Типология словосочетаний. Лекция 9
Типология словосочетаний. Лекция 9 Лирика поэтов, участников Великой Отечественной войны
Лирика поэтов, участников Великой Отечественной войны Использование современных образовательных технологий при конструировании занятий по иностранному языку
Использование современных образовательных технологий при конструировании занятий по иностранному языку Международный день прав животных
Международный день прав животных Мои дети-моя гордость.
Мои дети-моя гордость. Мобильные приложения для исследований Биомеханики движений в спорте Губарева Н.В
Мобильные приложения для исследований Биомеханики движений в спорте Губарева Н.В проект Люблю берёзку русскую
проект Люблю берёзку русскую Сроки. Исковая давность (подраздел 5, главы 11-12 ГК РФ)
Сроки. Исковая давность (подраздел 5, главы 11-12 ГК РФ) Для школ (2)
Для школ (2) Рассказ Федора Абрамова О чем плачут лошади
Рассказ Федора Абрамова О чем плачут лошади Юрист в государственном секторе
Юрист в государственном секторе Металлические конструкции, включая сварку. Элементы и соединения. Лекция 6. Часть 1
Металлические конструкции, включая сварку. Элементы и соединения. Лекция 6. Часть 1 Возможности электронного журнала
Возможности электронного журнала Создание проблемных ситуаций на занятиях в процессе обучения искусству прессованной флористики
Создание проблемных ситуаций на занятиях в процессе обучения искусству прессованной флористики Фетоплацентарная недостаточность
Фетоплацентарная недостаточность Введение в направление Электроэнергетика
Введение в направление Электроэнергетика Устройство автомобильной шины
Устройство автомобильной шины Диагностика классного коллектива
Диагностика классного коллектива Болат өндірісіндегі суды өңдеу
Болат өндірісіндегі суды өңдеу презентация к технологии Использование сказкотерапии в музыкальной и досуговой деятельности дошкольников
презентация к технологии Использование сказкотерапии в музыкальной и досуговой деятельности дошкольников Робототехника в Японии
Робототехника в Японии Нефтяной комплекс России
Нефтяной комплекс России Что нужно, чтобы стать работником в отрасли “Телекоммуникации и связь”
Что нужно, чтобы стать работником в отрасли “Телекоммуникации и связь” Уравнения. Решение уравнений
Уравнения. Решение уравнений Произведение двух последовательных отрицательных чисел
Произведение двух последовательных отрицательных чисел