- Оптимальное управление

Содержание
- 2. 1. Постановка задачи оптимизации
- 3. Понятие “оптимизация” Людям свойственно стремление к лучшему, и если им приходится выбирать из нескольких возможностей, то
- 4. Понятие “оптимизация” Критериальный выбор заключается в принятии некоторого критерия и сравнении возможных вариантов, соответствующих критерию. Если
- 5. Понятие “оптимизация” Под оптимизацией понимают процесс выбора наилучшего варианта из всех возможных Для того чтобы найти
- 6. История развития оптимизации 825 г. до н.э. – задача царицы Дидоны Финикийская царевна Дидона и с
- 7. Параметрические задачи требуется указать оптимальную форму участка земли, который при заданной длине периметра L, имеет наибольшую
- 8. Задача Евклида (IV в. до н.э.) В заданный треугольник ABC с высотой Н и основанием b
- 9. Этапы постановки задачи оптимального управления Вербальное (словесное) описание задачи. Определение основных целей, достигаемых при решении задачи
- 10. Этапы постановки задачи оптимального управления Построение математической модели. Вводятся обозначения для всех переменных (желательно с указанием
- 11. Постановка задачи оптимизации 1) Вербальное (словесное) описание задачи Найти стороны прямоугольника, вписанного в окружность радиуса R
- 12. Решение задачи оптимизации Найти стороны прямоугольника, вписанного в окружность радиуса R и имеющего наибольшую площадь S
- 13. Переменные, характеризующие объект управления: x1 … xm u1 y1 ur yn Входные переменные: возмущающие (внешние) воздействия
- 14. Состояния объекта управления Статическое состояние Динамическое состояние
- 15. Статическое состояние Признаком статического состояния объекта управления является постоянство во времени переменных, характеризующих состояние объекта управления,
- 16. Связь переменных при статическом состоянии объекта Связь переменных при статическом состоянии объекта управления: или , где
- 17. Виды критериев оптимальности
- 18. Пример. Во время второй мировой войны несколько сот английских торговых судов на Средиземном море были вооружены
- 19. Требования к критерию оптимальности Параметр оптимизации – это признак, по которому мы хотим оптимизировать процесс. Он
- 20. Классификация задач оптимизации 1) По количеству варьируемых переменных В зависимости от числа управляемых параметров различают методы
- 21. Классификация задач оптимизации 2) По области определения Неограниченными: x∈ R – Безусловная задача оптимизации Ограниченными: x∈
- 22. Ограничения представляют собой различные технические, экономические, экологические условия, учитываемые при решении задачи. Ограничения представляют собой зависимости
- 23. Граничные условия устанавливают диапазон изменения искомых переменных di ≤ хi ≤ Di, i=1, 2, … n,
- 24. 3) По виду зависимости Зависимость между переменными в целевой функции может быть линейной или нелинейной. Линейной
- 25. Пример задачи линейного программирования Обозначим через tj - время, в течении которого изделия выпускаются по j-ой
- 26. 4) По количеству экстремумов Нелинейная целевая функция в заданном диапазоне изменения переменных может иметь один экстремум
- 27. Если переменные могут принимать любые значения, такие переменные называются непрерывными. Если переменные могут принимать только значения
- 28. Задачи, в которых оптимизация проводится не по одному, а по нескольким критериям, относятся к классу задач
- 29. Обычно проводится операция свертки критериев с целью получения значения компромиссного решения. Если все показатели измеряются по
- 30. Виды объектов управления: объект с сосредоточенными параметрами; объект с распределенными параметрами. Объект с сосредоточенными параметрами –
- 31. Критерии оптимальности для объектов, находящихся в статическом состоянии: для объектов с сосредоточенными параметрами – целевая функция
- 32. Динамическое состояние Признаком динамического состояния объекта управления является изменение во времени переменных, характеризующих состояние объекта управления,
- 33. Связь переменных при динамическом состоянии объекта Связь переменных при динамическом состоянии объекта управления: , или ,
- 34. Вариационное исчисление Задача о брахистохроне. В 1696 г. появилась заметка И. Бернулли с интригующим заглавием: «Новая
- 35. В задаче же о брахистохроне множество всех кривых, соединяющих две точки, бесконечномерно. Здесь требуется найти экстремум
- 36. Критерии оптимальности для объектов, находящихся в динамическом состоянии есть функционал в виде: , где , t
- 37. 2. Одномерная оптимизация 2.1 Необходимые и достаточные условия экстремума функции одной переменной
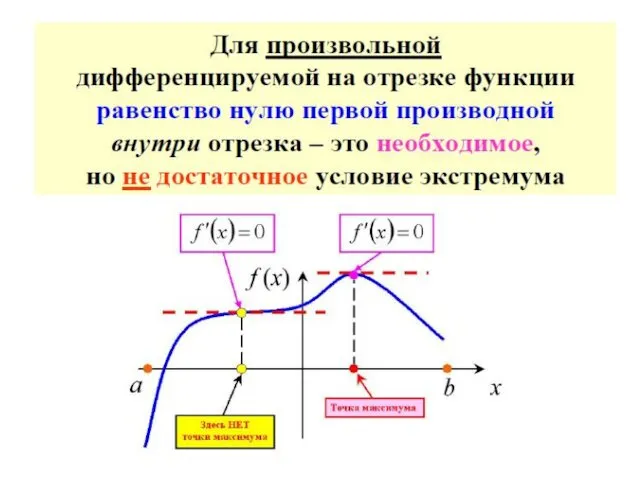
- 38. Теорема Вейерштрасса. Всякая функция f(x), непрерывная на отрезке [a,b], принимает на этом отрезке наименьшее и наибольшее
- 41. Задачи оптим. проектирования Пусть требуется спроектировать бак горючего в виде прямого цилиндра заданного объема V, на
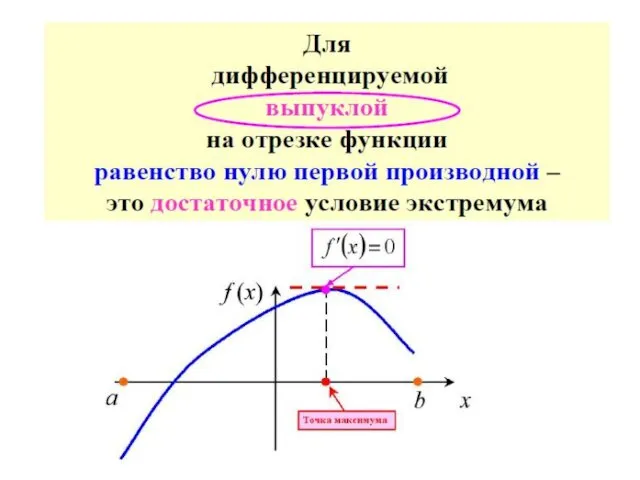
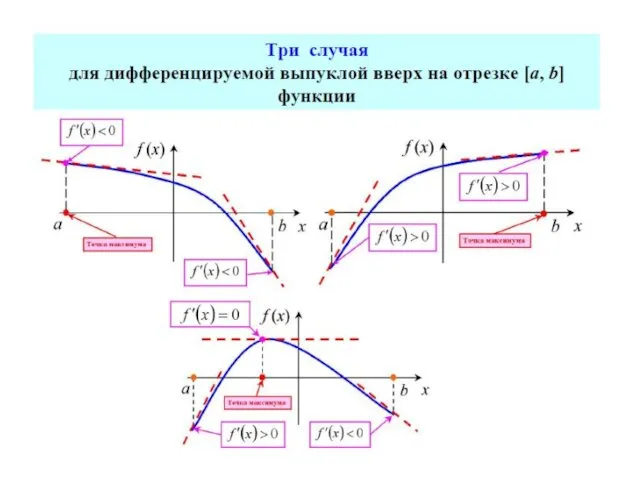
- 42. Необходимые и достаточные условия минимума функции одной переменной
- 43. Пример 1. Аналитический поиск безусловного экстремума. Функция одной переменной
- 44. К примеру 1
- 45. Пример 2. Аналитический поиск условного экстремума. Функция одной переменной
- 46. Примеры исследования функции одной переменной на экстремум Пример 1. Q = (1-u)3. Необходимое условие экстремума :
- 47. Примеры исследования функции одной переменной на экстремум Пример 2. Q = (1-u)4. Необходимое условие экстремума: 4(1-u*)3(-1)
- 48. 2. Одномерная оптимизация 2.2 Численные методы прямого поиска экстремума функции одной переменной
- 49. Методы одномерной оптимизации Дана некоторая функция f(x) от одной переменной x, надо определить такое значение x*,
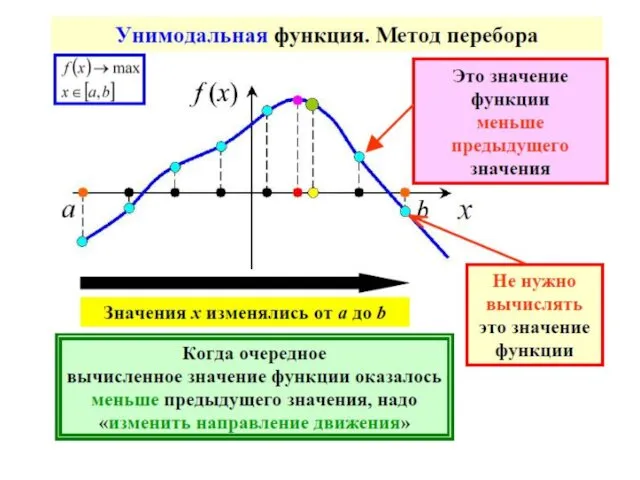
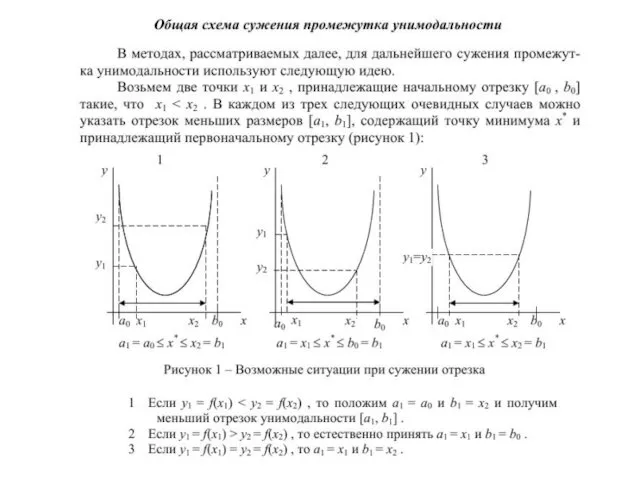
- 66. Достаточное условие унимодальности
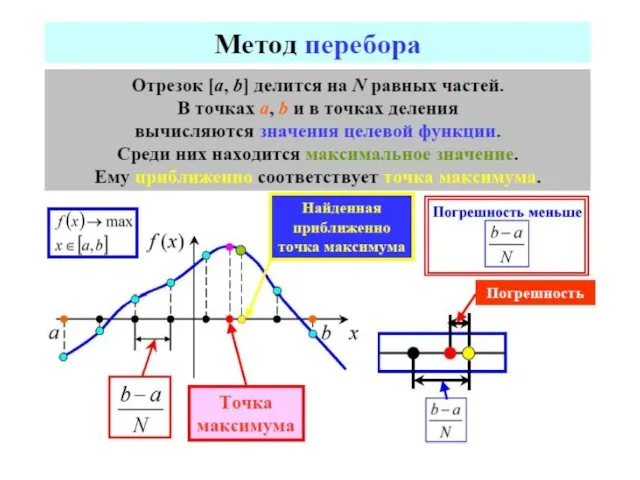
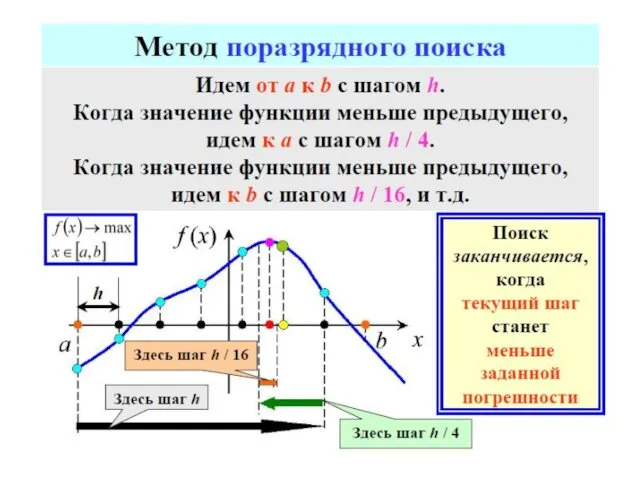
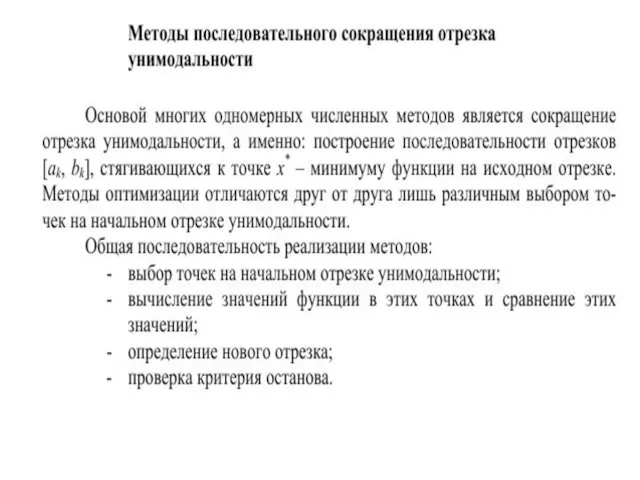
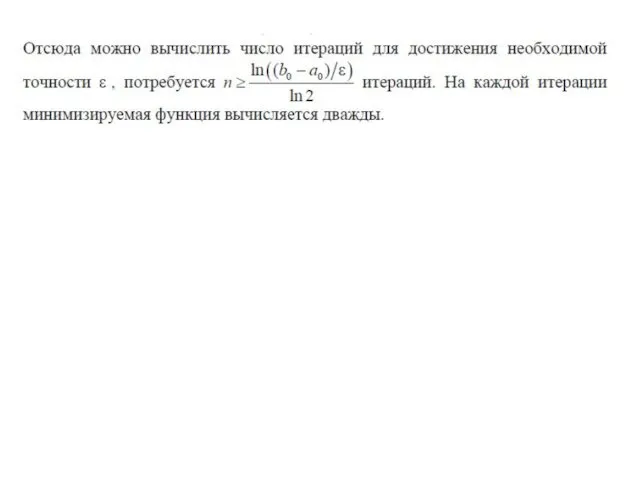
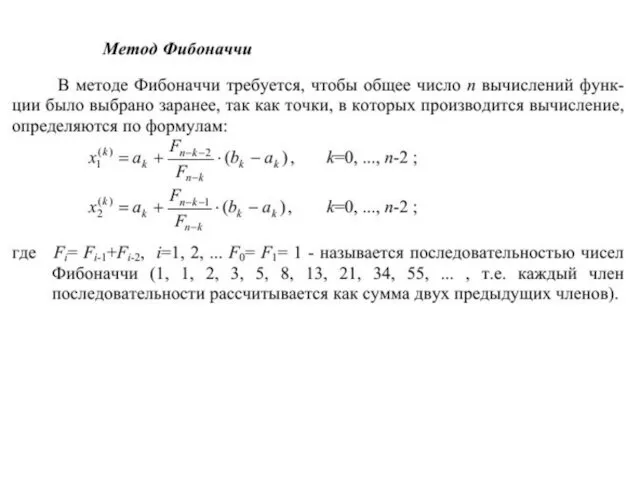
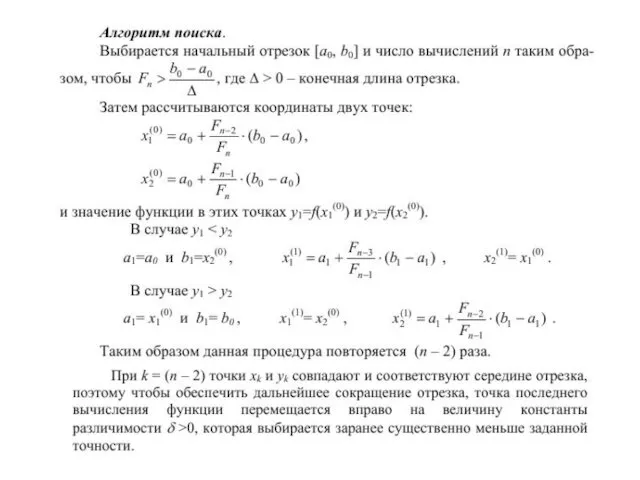
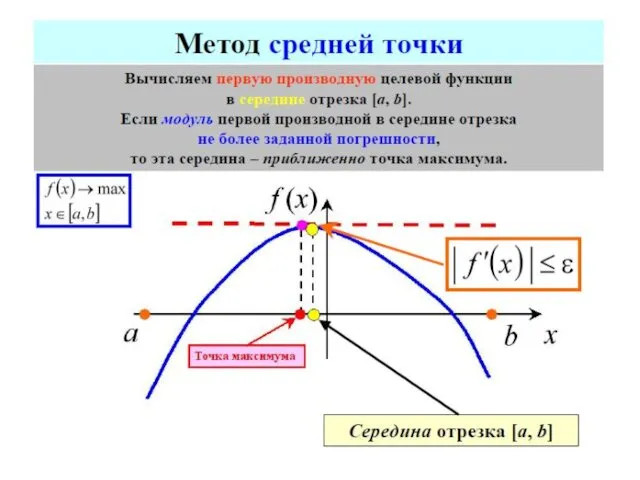
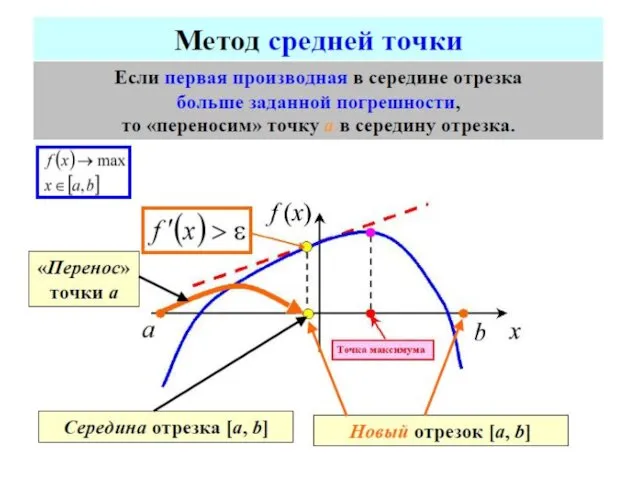
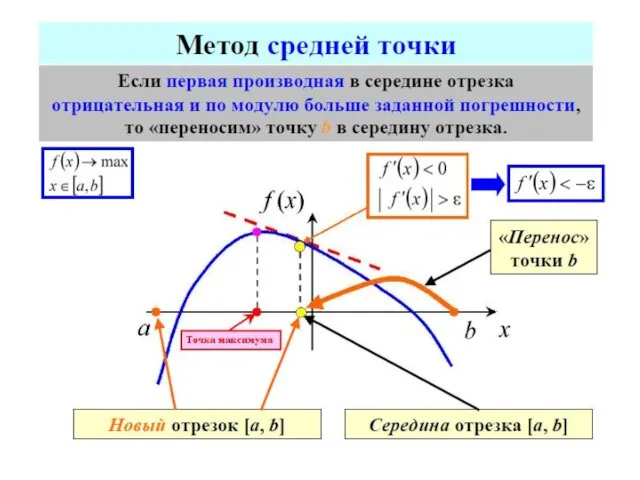
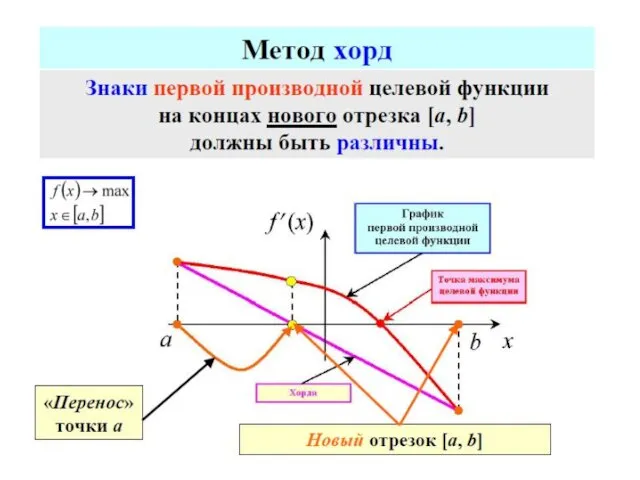
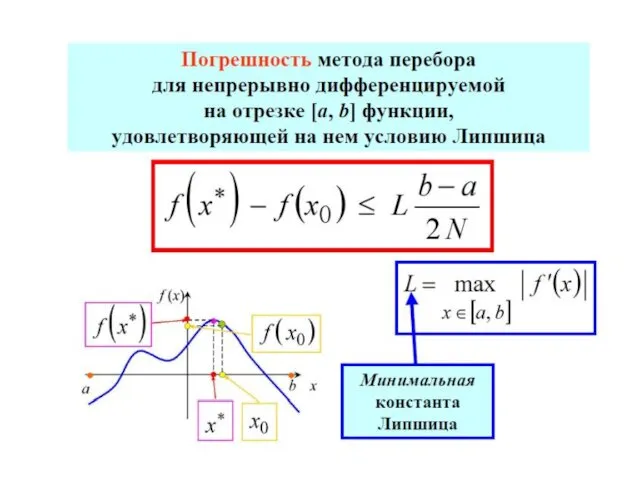
- 69. Так как в прикладных задачах вычисление каждого значения функции может быть достаточно трудоемким, то целесообразно выбрать
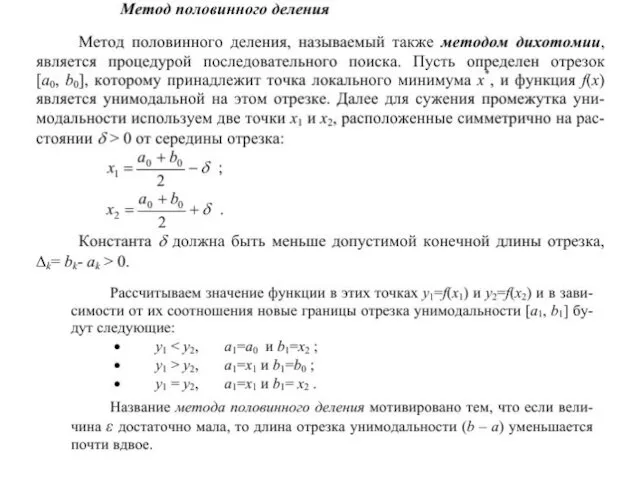
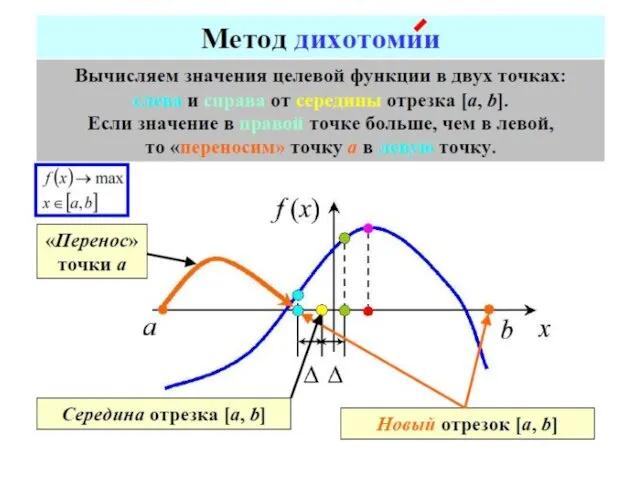
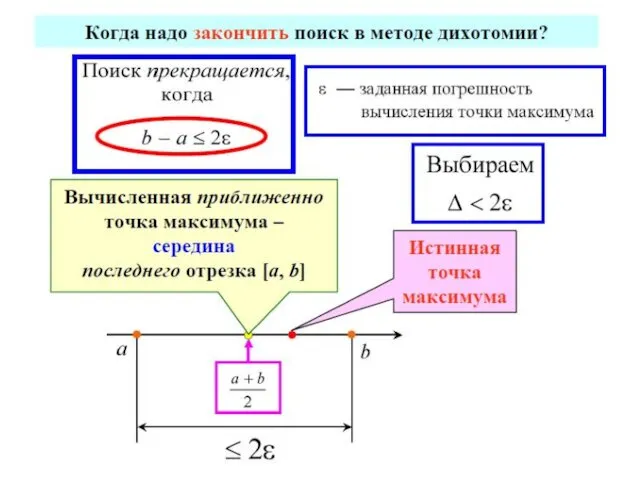
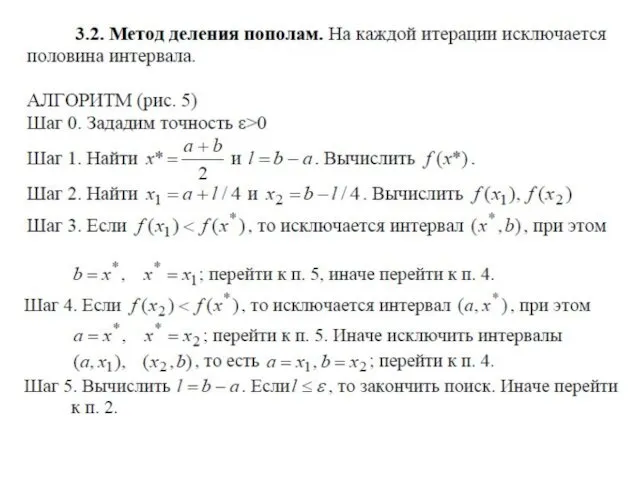
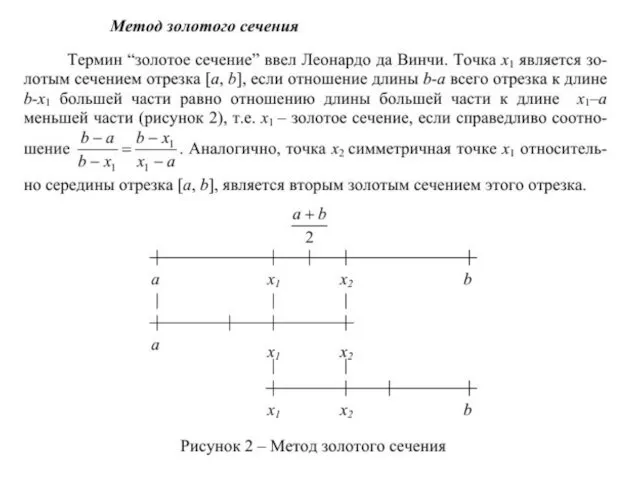
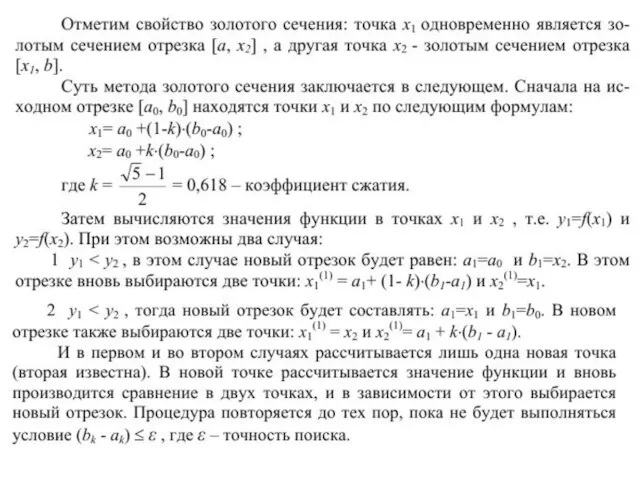
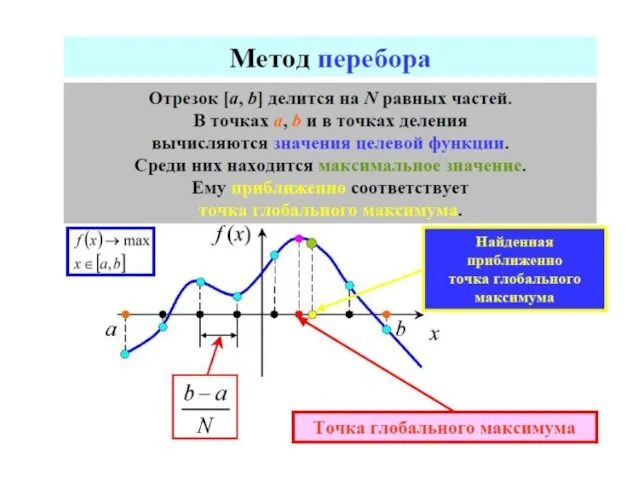
- 70. МЕТОДЫ ОДНОМЕРНОЙ ОПТИМИЗАЦИИ МЕТОДЫ ПОСЛЕДОВАТЕЛЬНОГО ПОИСКА МЕТОДЫ ПАССИВНОГО ПОИСКА МЕТОДЫ НУЛЕВОГО ПОРЯДКА метод половинного деления метод
- 108. Скачать презентацию
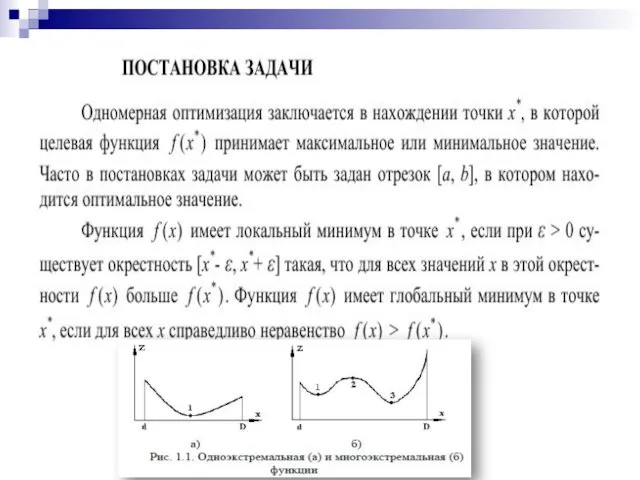
1. Постановка задачи оптимизации
1. Постановка задачи оптимизации
Понятие “оптимизация”
Людям свойственно стремление к лучшему, и если им приходится выбирать
Понятие “оптимизация”
Людям свойственно стремление к лучшему, и если им приходится выбирать
Понятие “оптимизация”
Критериальный выбор заключается в принятии некоторого критерия и сравнении возможных
Понятие “оптимизация”
Критериальный выбор заключается в принятии некоторого критерия и сравнении возможных
Понятие “оптимизация”
Под оптимизацией понимают процесс выбора наилучшего варианта из всех возможных
Понятие “оптимизация”
Под оптимизацией понимают процесс выбора наилучшего варианта из всех возможных
История развития оптимизации
825 г. до н.э. – задача царицы Дидоны
Финикийская царевна
История развития оптимизации
825 г. до н.э. – задача царицы Дидоны
Финикийская царевна
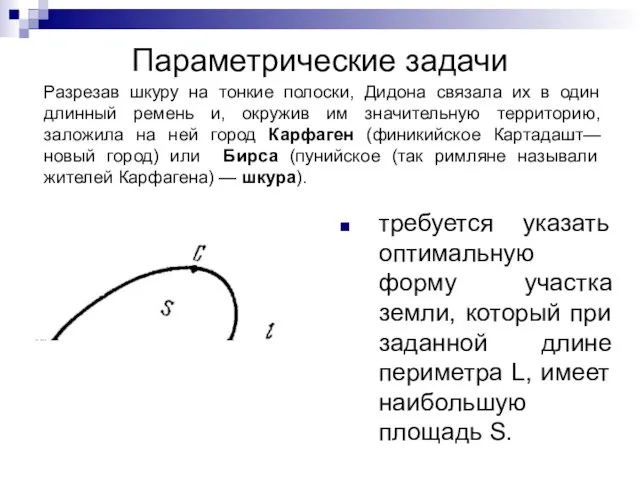
Параметрические задачи
требуется указать оптимальную форму участка земли, который при заданной длине
Параметрические задачи
требуется указать оптимальную форму участка земли, который при заданной длине
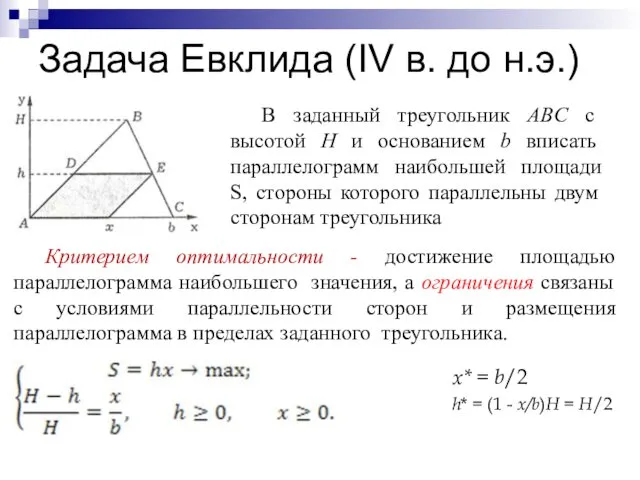
Задача Евклида (IV в. до н.э.)
В заданный треугольник ABC с высотой
Задача Евклида (IV в. до н.э.)
В заданный треугольник ABC с высотой
Этапы постановки задачи оптимального управления
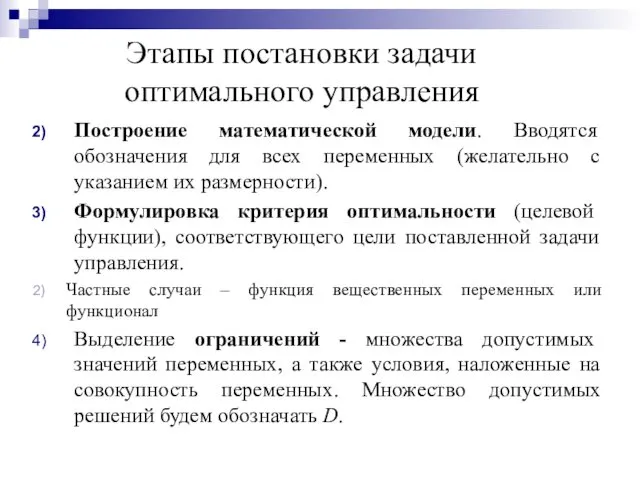
Вербальное (словесное) описание задачи. Определение основных целей,
Этапы постановки задачи оптимального управления
Вербальное (словесное) описание задачи. Определение основных целей,
Этапы постановки задачи оптимального управления
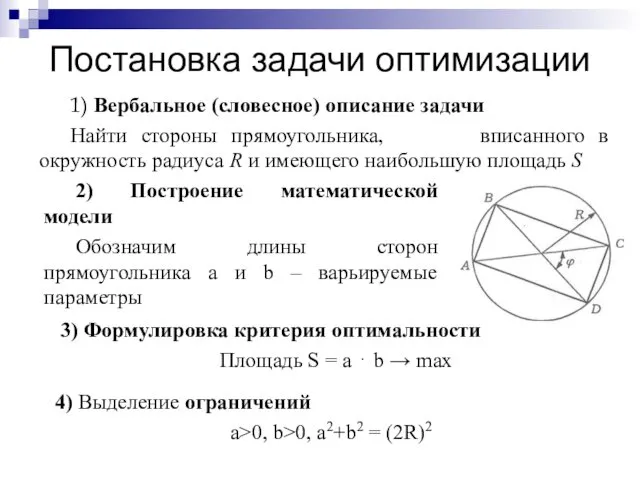
Построение математической модели. Вводятся обозначения для всех
Этапы постановки задачи оптимального управления
Построение математической модели. Вводятся обозначения для всех
Постановка задачи оптимизации
1) Вербальное (словесное) описание задачи
Найти стороны прямоугольника, вписанного в
Постановка задачи оптимизации
1) Вербальное (словесное) описание задачи
Найти стороны прямоугольника, вписанного в
Решение задачи оптимизации
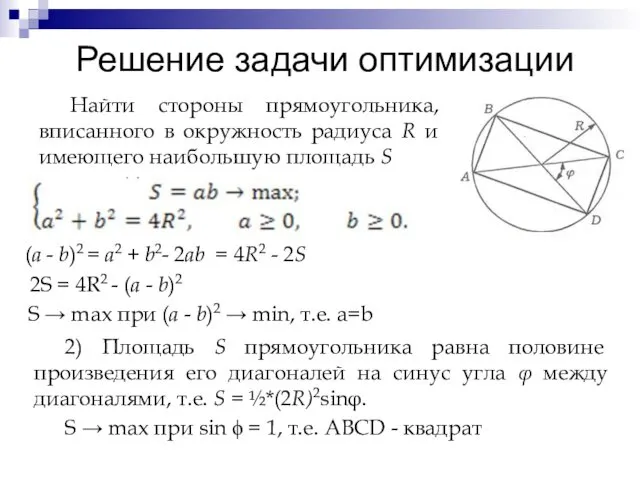
Найти стороны прямоугольника, вписанного в окружность радиуса R
Решение задачи оптимизации
Найти стороны прямоугольника, вписанного в окружность радиуса R
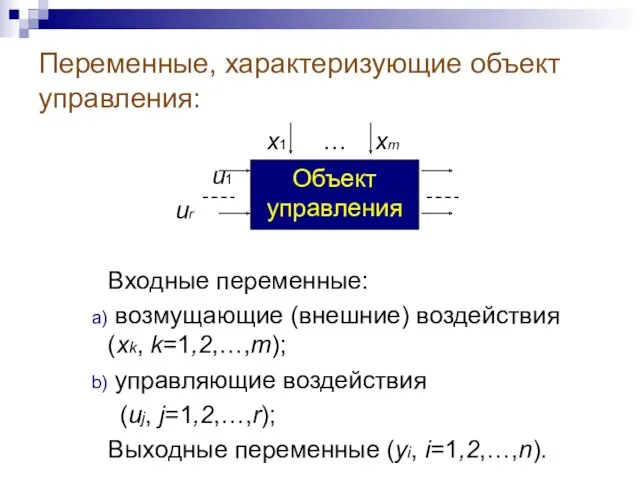
Переменные, характеризующие объект управления:
x1 … xm
u1 y1
ur yn
Входные
Переменные, характеризующие объект управления:
x1 … xm
u1 y1
ur yn
Входные
Состояния объекта управления
Статическое состояние
Динамическое состояние
Состояния объекта управления
Статическое состояние
Динамическое состояние
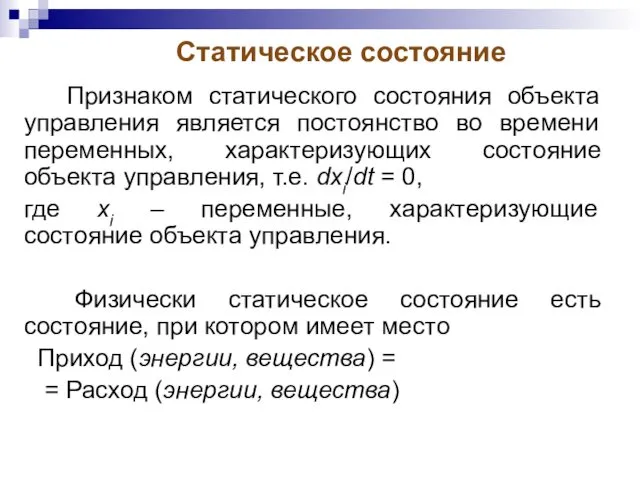
Статическое состояние
Признаком статического состояния объекта управления является постоянство во времени
Статическое состояние
Признаком статического состояния объекта управления является постоянство во времени
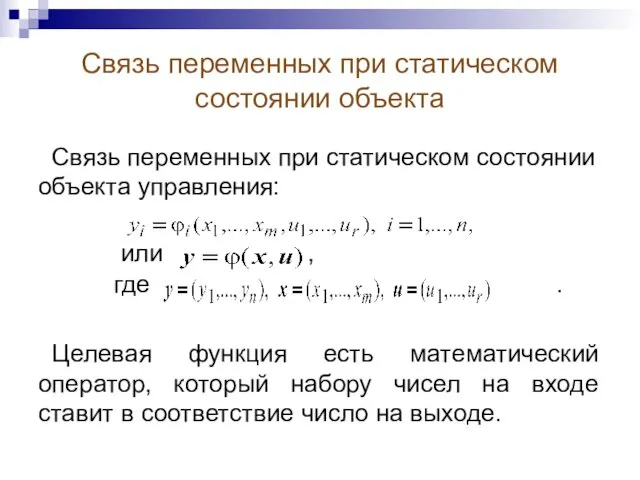
Связь переменных при статическом состоянии объекта
Связь переменных при статическом состоянии объекта
Связь переменных при статическом состоянии объекта
Связь переменных при статическом состоянии объекта
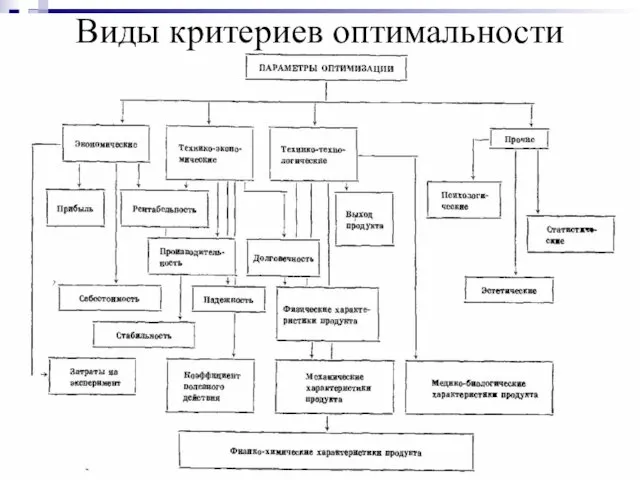
Виды критериев оптимальности
Виды критериев оптимальности
Пример. Во время второй мировой войны несколько сот английских торговых судов
Пример. Во время второй мировой войны несколько сот английских торговых судов
Требования к критерию оптимальности
Параметр оптимизации – это признак, по которому мы
Требования к критерию оптимальности
Параметр оптимизации – это признак, по которому мы
Классификация задач оптимизации
1) По количеству варьируемых переменных
В зависимости от числа управляемых
Классификация задач оптимизации
1) По количеству варьируемых переменных
В зависимости от числа управляемых
Классификация задач оптимизации
2) По области определения
Неограниченными: x∈ R –
Безусловная задача
Классификация задач оптимизации
2) По области определения
Неограниченными: x∈ R –
Безусловная задача
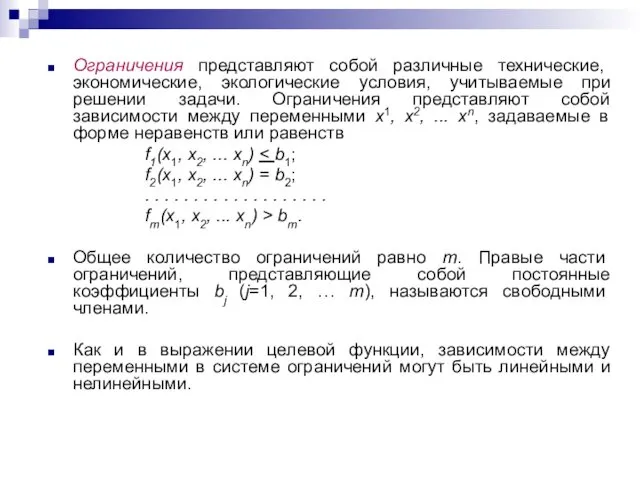
Ограничения представляют собой различные технические, экономические, экологические условия, учитываемые при
Ограничения представляют собой различные технические, экономические, экологические условия, учитываемые при
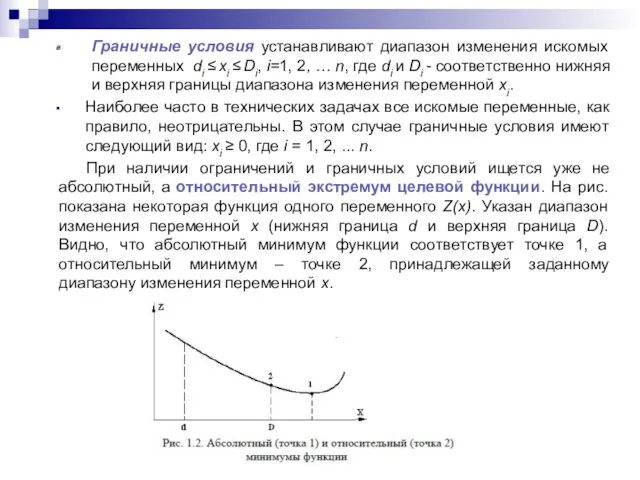
Граничные условия устанавливают диапазон изменения искомых переменных di ≤ хi
Граничные условия устанавливают диапазон изменения искомых переменных di ≤ хi
3) По виду зависимости
Зависимость между переменными в целевой функции может быть
3) По виду зависимости
Зависимость между переменными в целевой функции может быть
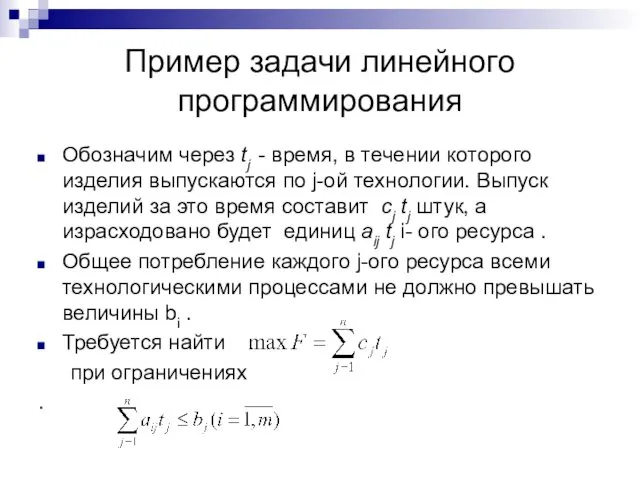
Пример задачи линейного программирования
Обозначим через tj - время, в течении которого
Пример задачи линейного программирования
Обозначим через tj - время, в течении которого
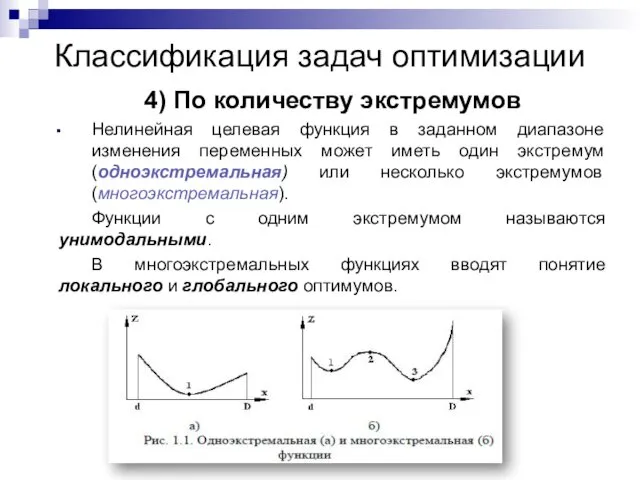
4) По количеству экстремумов
Нелинейная целевая функция в заданном диапазоне изменения
4) По количеству экстремумов
Нелинейная целевая функция в заданном диапазоне изменения
Если переменные могут принимать любые значения, такие переменные называются непрерывными.
Если переменные могут принимать любые значения, такие переменные называются непрерывными.
Задачи, в которых оптимизация проводится не по одному, а по
Задачи, в которых оптимизация проводится не по одному, а по
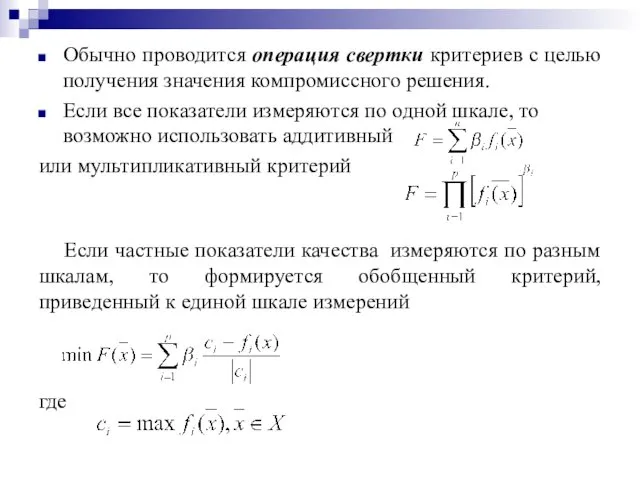
Обычно проводится операция свертки критериев с целью получения значения компромиссного решения.
Если
Обычно проводится операция свертки критериев с целью получения значения компромиссного решения.
Если
Виды объектов управления:
объект с сосредоточенными параметрами;
объект с распределенными параметрами.
Объект с
Виды объектов управления:
объект с сосредоточенными параметрами;
объект с распределенными параметрами.
Объект с
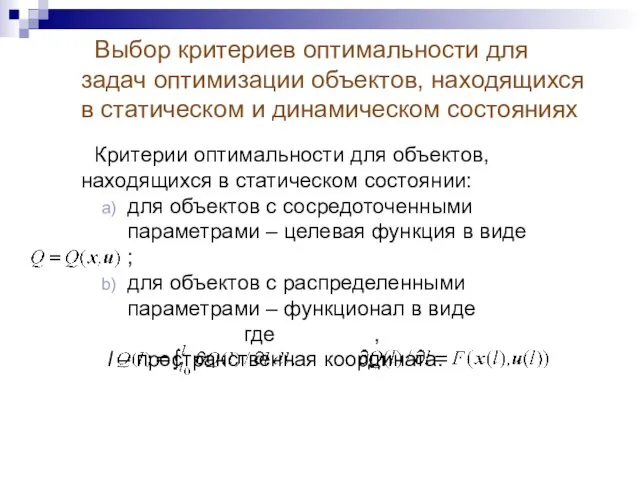
Критерии оптимальности для объектов, находящихся в статическом состоянии:
для объектов с сосредоточенными
Критерии оптимальности для объектов, находящихся в статическом состоянии:
для объектов с сосредоточенными
Динамическое состояние
Признаком динамического состояния объекта управления является изменение во времени переменных,
Динамическое состояние
Признаком динамического состояния объекта управления является изменение во времени переменных,
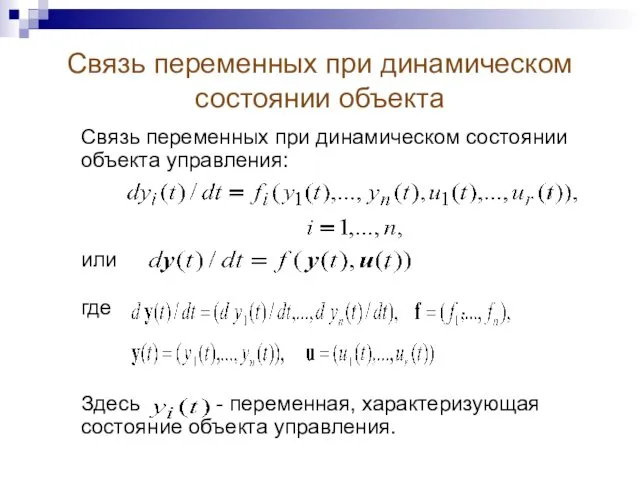
Связь переменных при динамическом состоянии объекта
Связь переменных при динамическом состоянии объекта
Связь переменных при динамическом состоянии объекта
Связь переменных при динамическом состоянии объекта
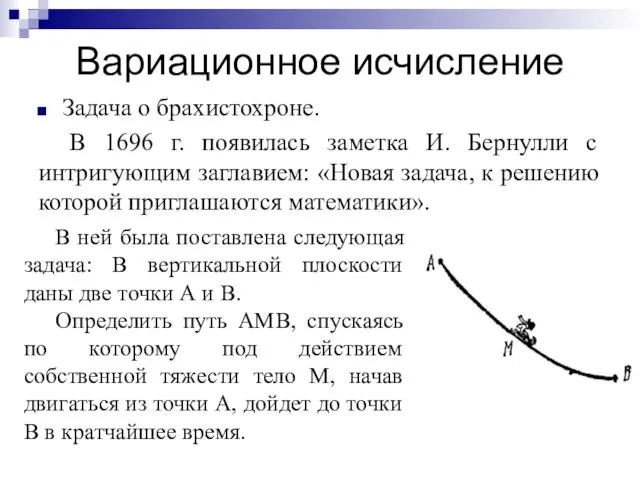
Вариационное исчисление
Задача о брахистохроне.
В 1696 г. появилась заметка И. Бернулли
Вариационное исчисление
Задача о брахистохроне.
В 1696 г. появилась заметка И. Бернулли
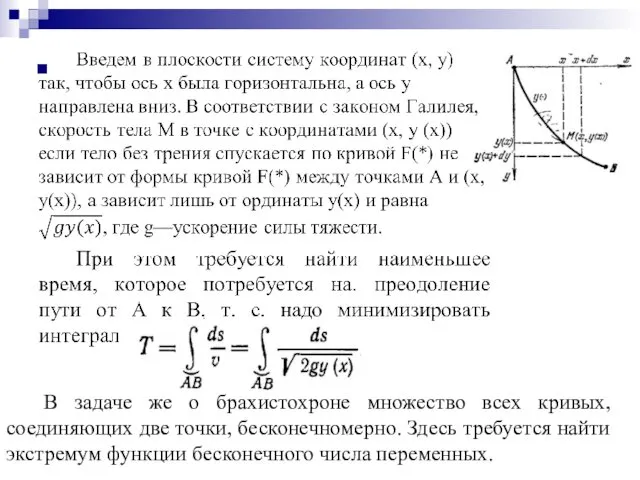
В задаче же о брахистохроне множество всех кривых, соединяющих две точки,
В задаче же о брахистохроне множество всех кривых, соединяющих две точки,
Критерии оптимальности для объектов, находящихся в динамическом состоянии есть функционал в
Критерии оптимальности для объектов, находящихся в динамическом состоянии есть функционал в
2. Одномерная оптимизация
2.1 Необходимые и достаточные условия экстремума функции одной переменной
2. Одномерная оптимизация
2.1 Необходимые и достаточные условия экстремума функции одной переменной
![Теорема Вейерштрасса. Всякая функция f(x), непрерывная на отрезке [a,b], принимает](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/57350/slide-37.jpg)
Теорема Вейерштрасса.
Всякая функция f(x), непрерывная на отрезке [a,b], принимает на
Теорема Вейерштрасса.
Всякая функция f(x), непрерывная на отрезке [a,b], принимает на
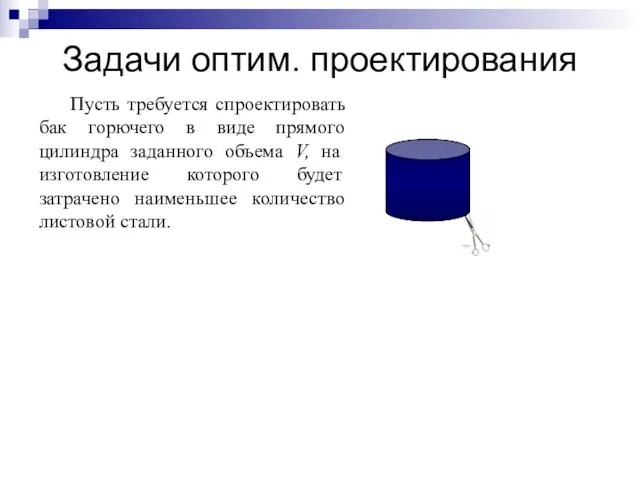
Задачи оптим. проектирования
Пусть требуется спроектировать бак горючего в виде прямого цилиндра
Задачи оптим. проектирования
Пусть требуется спроектировать бак горючего в виде прямого цилиндра
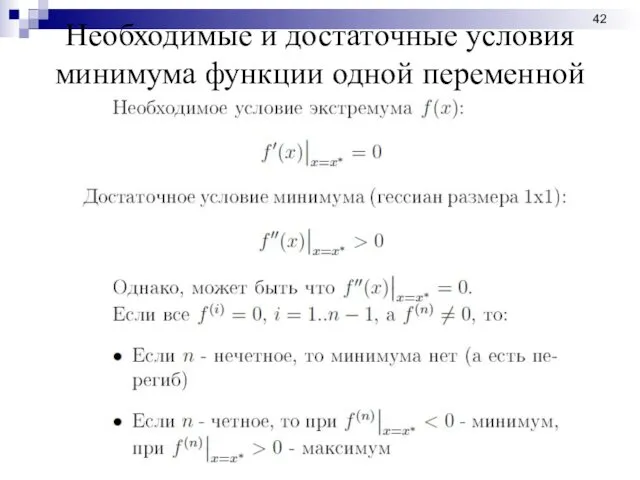
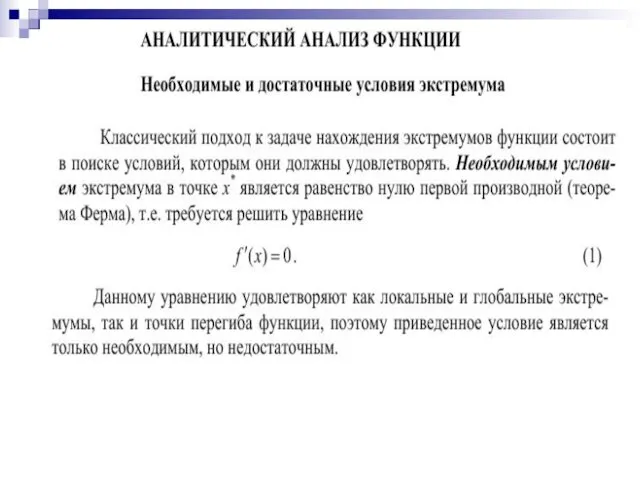
Необходимые и достаточные условия минимума функции одной переменной
Необходимые и достаточные условия минимума функции одной переменной
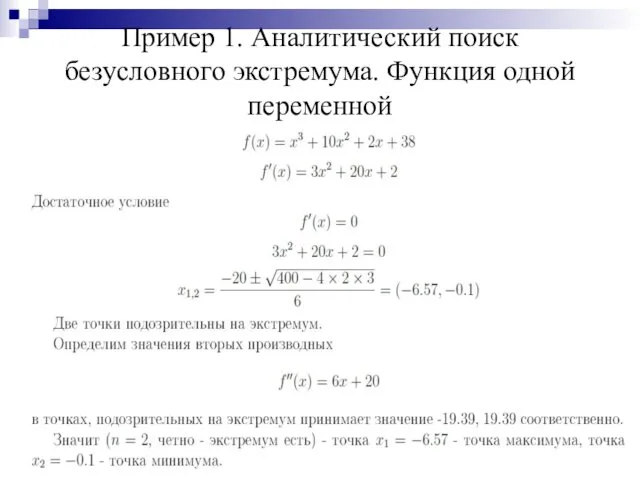
Пример 1. Аналитический поиск безусловного экстремума. Функция одной переменной
Пример 1. Аналитический поиск безусловного экстремума. Функция одной переменной
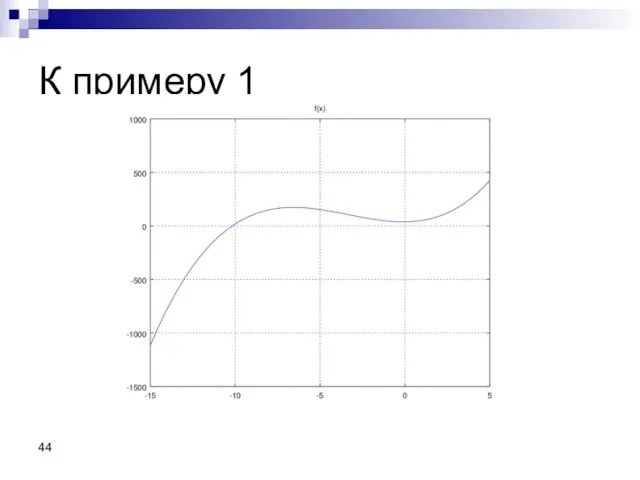
К примеру 1
К примеру 1
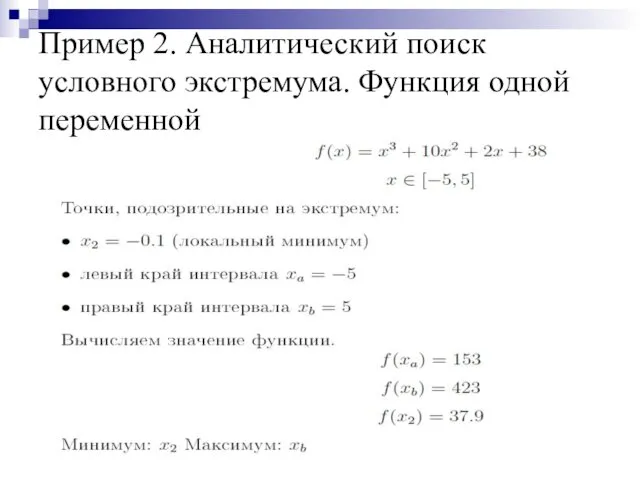
Пример 2. Аналитический поиск условного экстремума. Функция одной переменной
Пример 2. Аналитический поиск условного экстремума. Функция одной переменной
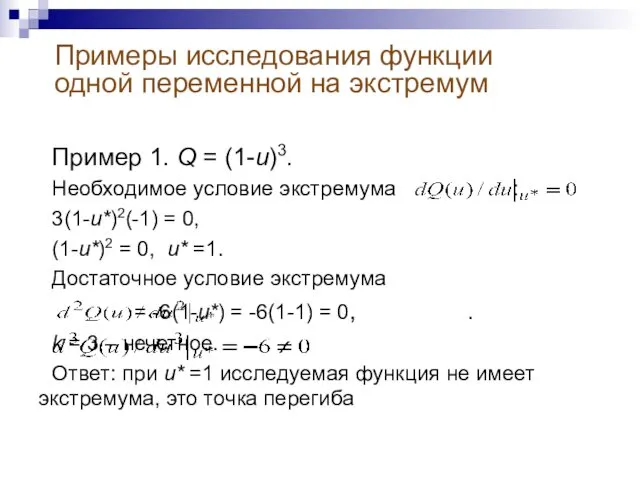
Примеры исследования функции одной переменной на экстремум
Пример 1. Q = (1-u)3.
Примеры исследования функции одной переменной на экстремум
Пример 1. Q = (1-u)3.
Примеры исследования функции одной переменной на экстремум
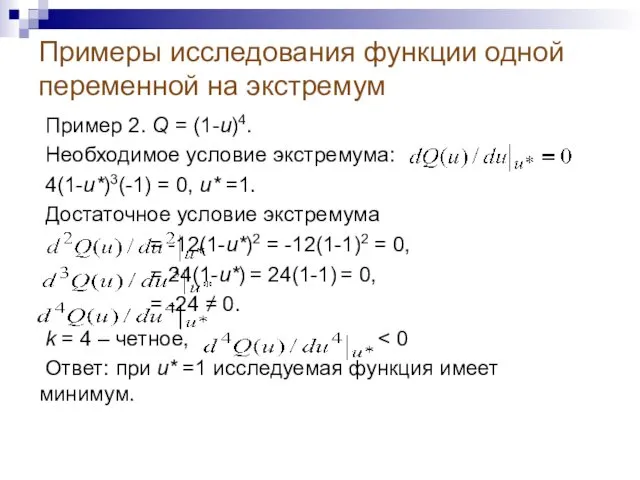
Пример 2. Q = (1-u)4.
Примеры исследования функции одной переменной на экстремум
Пример 2. Q = (1-u)4.
2. Одномерная оптимизация
2.2 Численные методы прямого поиска экстремума функции
одной переменной
2. Одномерная оптимизация
2.2 Численные методы прямого поиска экстремума функции
одной переменной
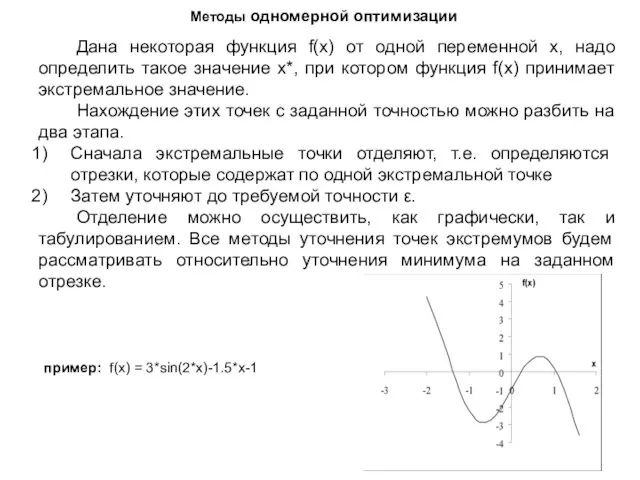
Методы одномерной оптимизации
Дана некоторая функция f(x) от одной переменной x,
Методы одномерной оптимизации
Дана некоторая функция f(x) от одной переменной x,
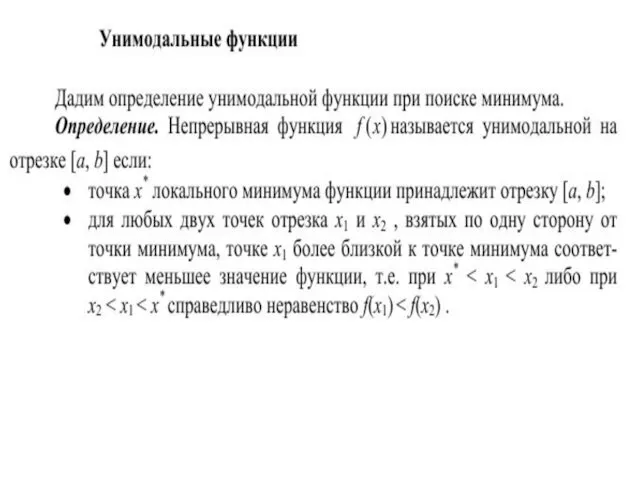
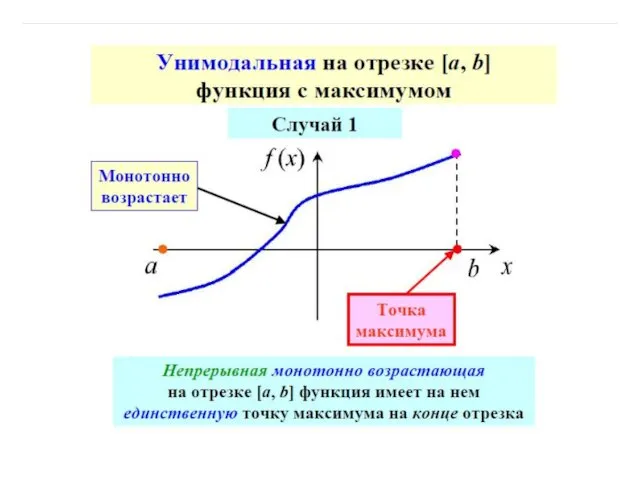
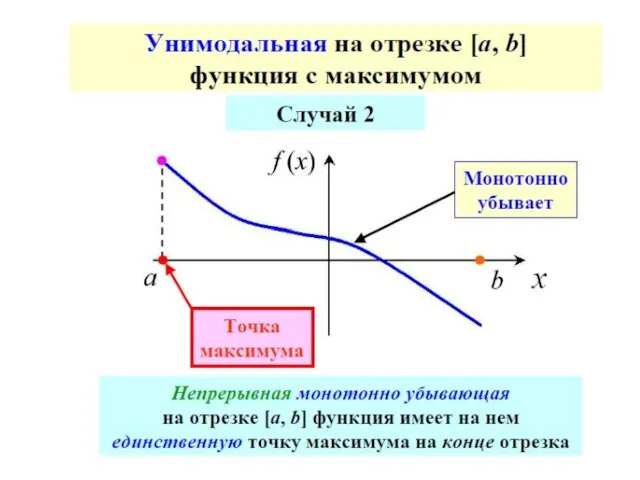
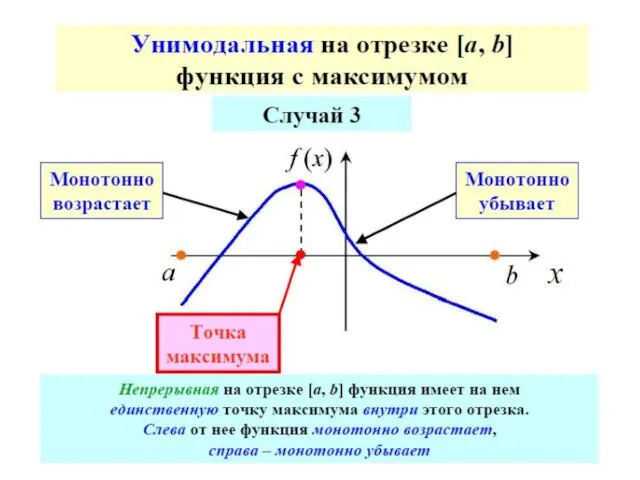
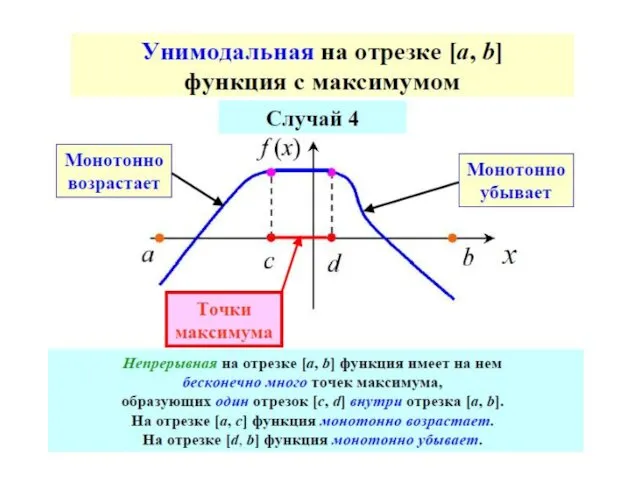
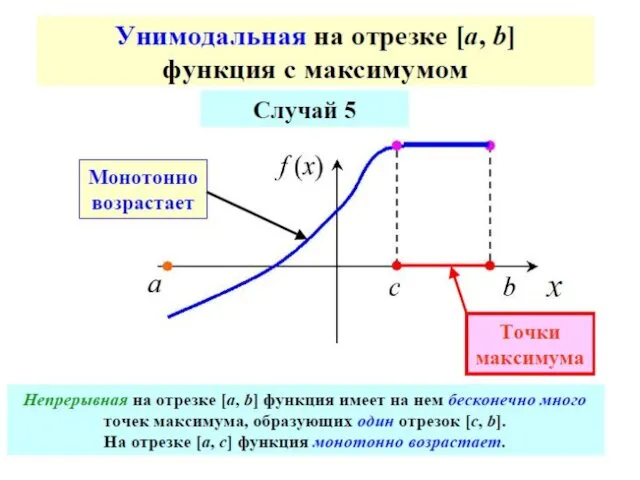

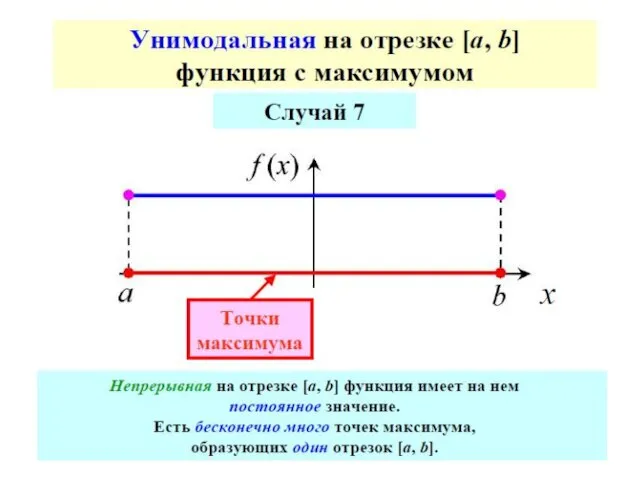
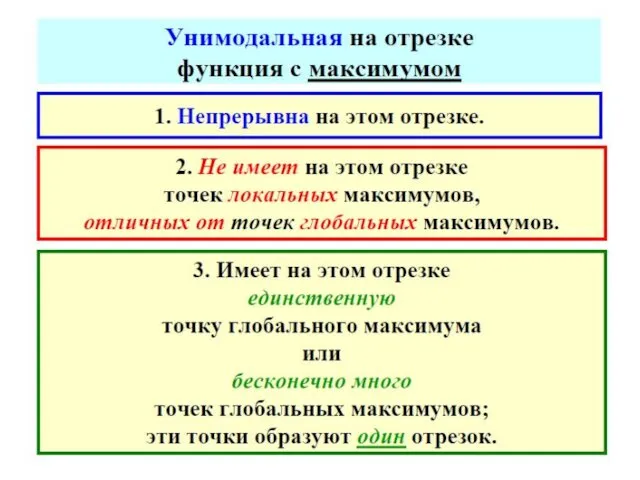
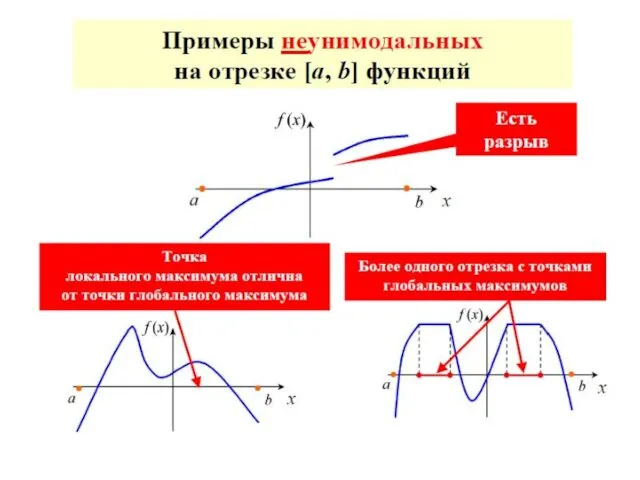
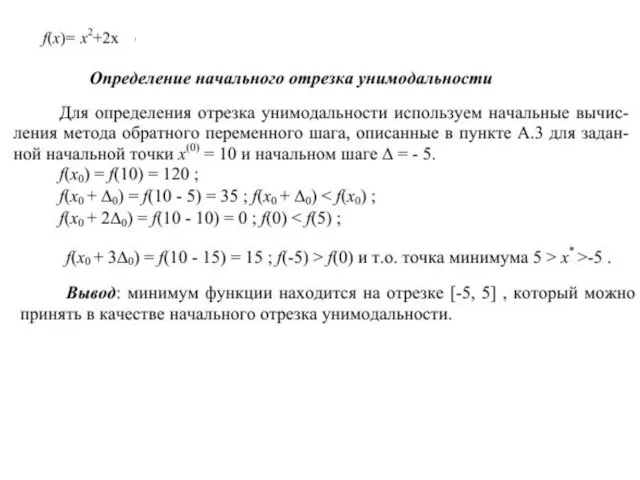

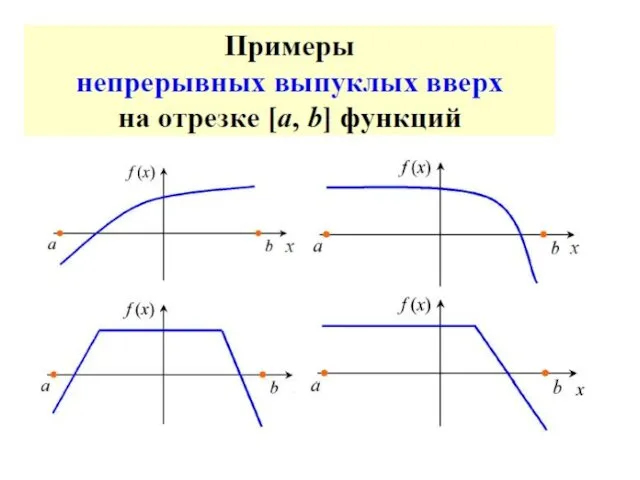

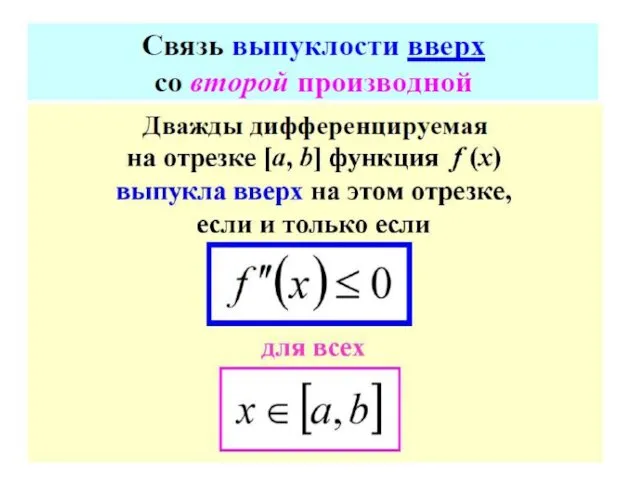
Достаточное условие унимодальности
Достаточное условие унимодальности


Так как в прикладных задачах вычисление каждого значения функции может быть
Так как в прикладных задачах вычисление каждого значения функции может быть
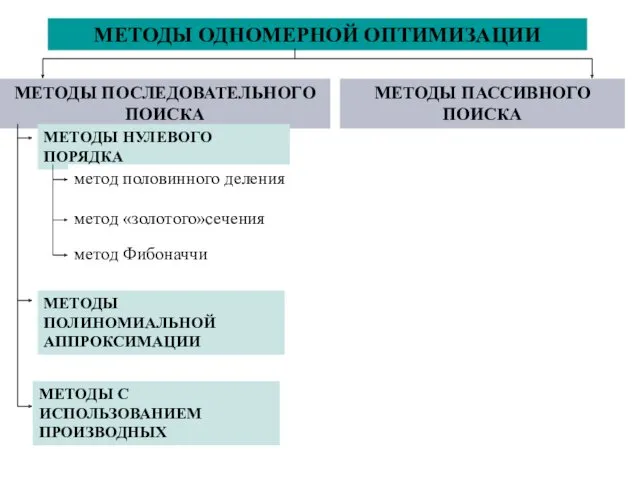
МЕТОДЫ ОДНОМЕРНОЙ ОПТИМИЗАЦИИ
МЕТОДЫ ПОСЛЕДОВАТЕЛЬНОГО ПОИСКА
МЕТОДЫ ПАССИВНОГО ПОИСКА
МЕТОДЫ НУЛЕВОГО ПОРЯДКА
метод половинного деления
метод
МЕТОДЫ ОДНОМЕРНОЙ ОПТИМИЗАЦИИ
МЕТОДЫ ПОСЛЕДОВАТЕЛЬНОГО ПОИСКА
МЕТОДЫ ПАССИВНОГО ПОИСКА
МЕТОДЫ НУЛЕВОГО ПОРЯДКА
метод половинного деления
метод




 Биография А.С. Пушкина Диск
Биография А.С. Пушкина Диск Русская народная сказка Репка
Русская народная сказка Репка Устройства приема и преобразования сигналов (УП и ПС)
Устройства приема и преобразования сигналов (УП и ПС) Нормы времени на погрузку и разгрузку транспортных средств
Нормы времени на погрузку и разгрузку транспортных средств Кафедра физического воспитания и спорта РАНХиГС
Кафедра физического воспитания и спорта РАНХиГС Исполнительная власть в Российской Федерации
Исполнительная власть в Российской Федерации Тез кескіш болаттар
Тез кескіш болаттар Создание штаммов микроорганизмов для биотехнологии
Создание штаммов микроорганизмов для биотехнологии Поняття текстового документа, його об’єктів. Урок 18
Поняття текстового документа, його об’єктів. Урок 18 Географическая карта.Урок географии в 5 классе
Географическая карта.Урок географии в 5 классе Подготовка данных к анализу. (Лекция 5)
Подготовка данных к анализу. (Лекция 5) Путешествие по стране Информация. Измерение информации
Путешествие по стране Информация. Измерение информации Обзор книги Сила воли. Автор: Келли Макгонигал
Обзор книги Сила воли. Автор: Келли Макгонигал Шаблон презентации
Шаблон презентации Классный час по теме Символика современных олимпийских игр.
Классный час по теме Символика современных олимпийских игр. Забавные животные
Забавные животные Шаблоны презентаций по математике
Шаблоны презентаций по математике Защита от воздействия высоких и низких температур
Защита от воздействия высоких и низких температур Электрический чайник
Электрический чайник Будущие избиратели
Будущие избиратели Дециметр (дм)
Дециметр (дм) Сценарий для пришкольного лагеря с презентацией До-Ми-Соль-ка
Сценарий для пришкольного лагеря с презентацией До-Ми-Соль-ка Дидактический материалдля развития лексико-грамматических категорий. Транспорт.
Дидактический материалдля развития лексико-грамматических категорий. Транспорт. Нефть и газ. Химический состав и свойства
Нефть и газ. Химический состав и свойства Классный час на тему Человек отражается в своих поступках
Классный час на тему Человек отражается в своих поступках Симптомы и методы обследования в пульмонологии
Симптомы и методы обследования в пульмонологии Кондитерская фабрика Красный Октябрь. Товарищество Эйнем в Москве
Кондитерская фабрика Красный Октябрь. Товарищество Эйнем в Москве Архитектура России в начале XIX века
Архитектура России в начале XIX века