- Основные принципы построения систем ввода вывода и интерфейсов

Содержание
- 2. Тема 1.1. Основные принципы построения систем ввода вывода и интерфейсов
- 3. Роль и место систем ввода-вывода и интерфейсов в компьютере
- 4. Что такое система ввода-вывода, периферия и интерфейсы? Система ввода-вывода (СВВ) – средства взаимосвязи и передачи информации,
- 5. Периферийные устройства (внешние устройства) ПУ можно разделить на две категории : -- внешние запоминающие устройства (ВЗУ);
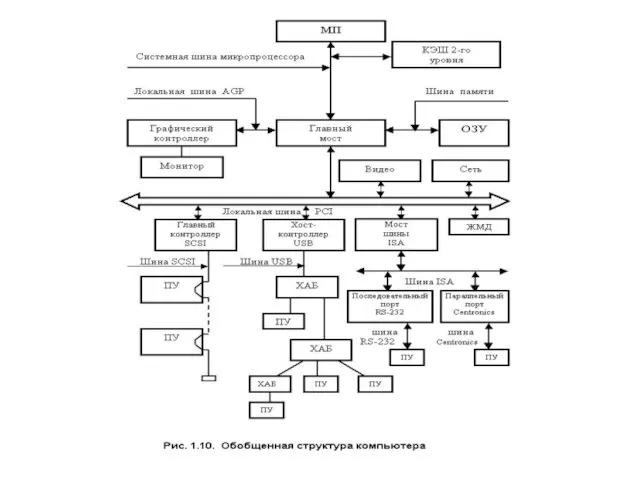
- 6. Функционально – модульная структура компьютера Компьютер можно представить в виде системы, состоящей из взаимосвязанных функционально законченных
- 8. ИНТЕРФЕЙС Средства и правила, обеспечивающие взаимосвязь устройств между собой, называются интерфейсом. В интерфейсе стандартизируются: 1.Назначение и
- 9. Некоторые понятия интерфейсов Канал – среда передачи информации, представляемой в виде определенных сигналов. Канал реализуется с
- 11. Топология интерфейсов 1.Точка – точка 2. Магистральная Шлейфовая 3.Многоуровневая звезда 1 2 1 N 1 2
- 12. Классификация интерфейсов Существует множество стандартных компьютерных интерфейсов различного назначения, обладающих своими особенностями и характеристиками. Их можно
- 13. 2.По организации обмена. а) Симплексный – передача в одну сторону. б) Полудуплексный – передача в две
- 14. 3. ПО архитектуре интерфейсов. 1. Параллельный интерфейс: а) трехшинный – шина данных, шина адреса, шина управления,
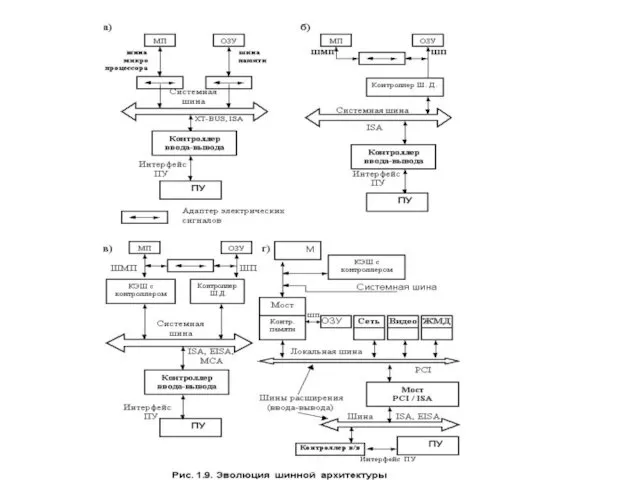
- 15. -- шины ввода –вывода (шины расширения) - предназначены для соединения ЦПР с ПУ. Они менее производительны,
- 16. Организация передачи информации между ЦПР и ПУ Все устройства, взаимодействующие с помощью интерфейсов, делятся на два
- 17. Основные принципы управления передачей информации в вычислительных системах
- 19. Интерфейсы периферийных устройств
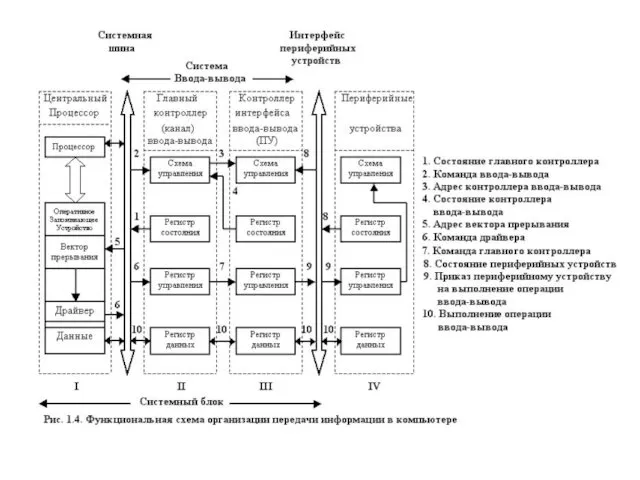
- 20. Структура систем ввода-вывода
- 23. Тема 1.2. Основные функции и принципы построения интерфейсов
- 24. Основные функции интерфейсов 1. Передача информации. 2. Синхронизация передачи информации. 3. Арбитрация, селекция. 4. Контроль функционирования
- 25. Функция передача информации Главная задача интерфейса -- организация надежной передачи информации от источника к приемнику в
- 26. Состояние линий интерфейса Линия интерфейса может находиться в двух состояниях: - активном, когда по линии передаются
- 27. Время передачи информации Пусть : А - источник, В - приемник. Сигнал на А Сигнал на
- 28. Транзакции и операции интерфейса Данные по линиям интерфейса передаются блоками. Блок, со – держащий в начале
- 29. Функция синхронизации При передаче информации источник должен знать, когда можно начинать передачу, а премник должен знать,
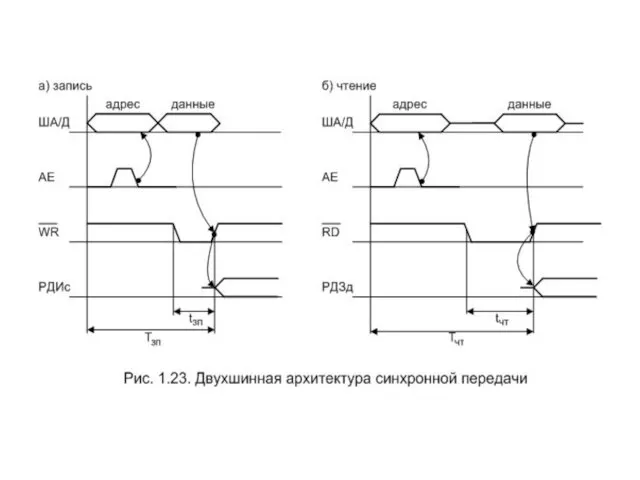
- 30. Два основных принципа синхронизации: Синхронный – когда смена состояний источника и приемника взаимонезависима и выполняется через
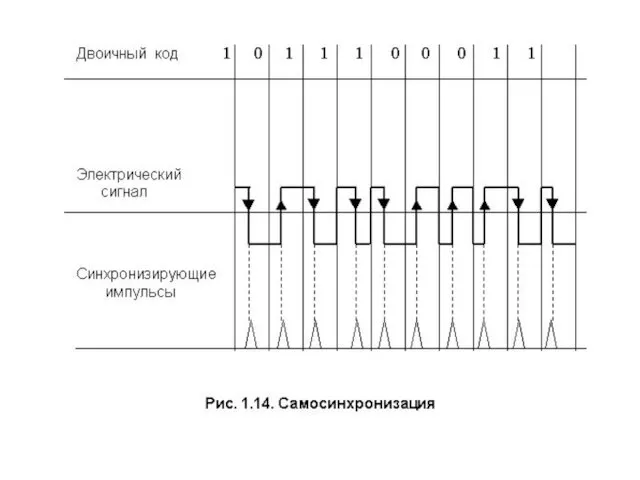
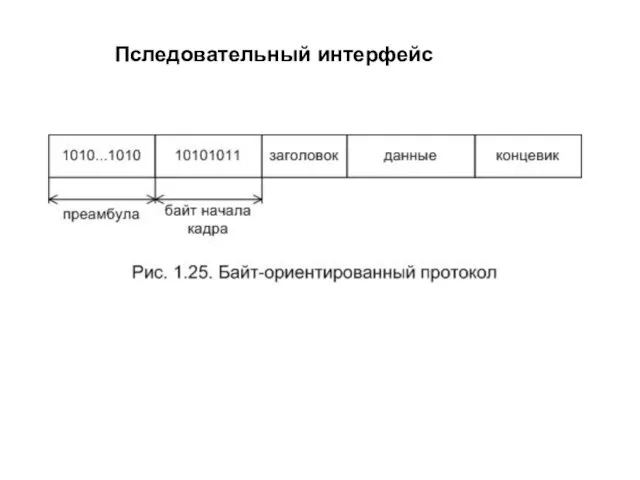
- 31. Последовательная передача данных Синхронный принцип синхронизации Использование специальной линии синхронизации от генератора синхроимпульсов (ГСИ), задающего период
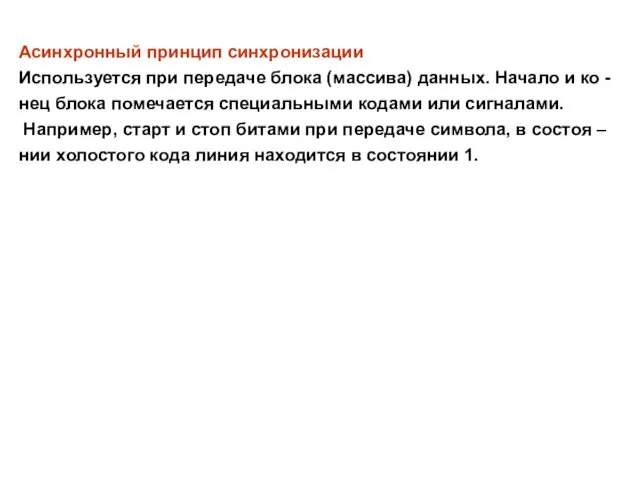
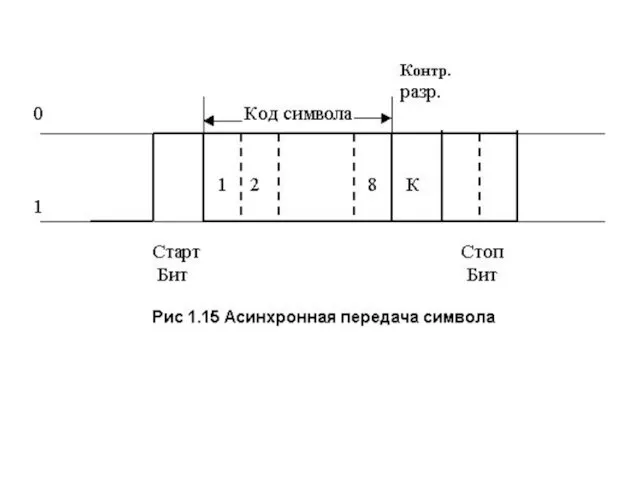
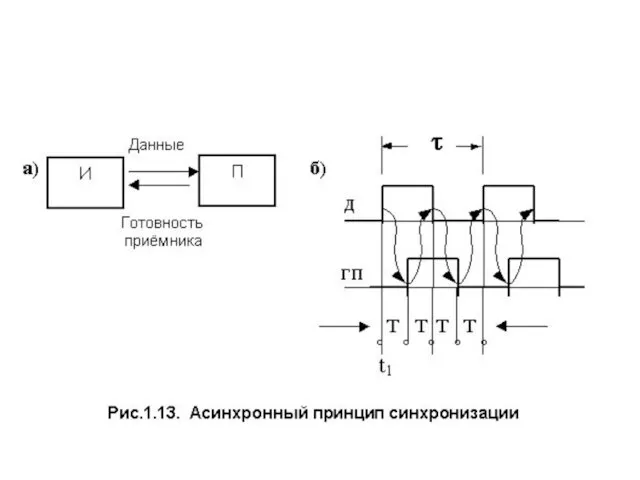
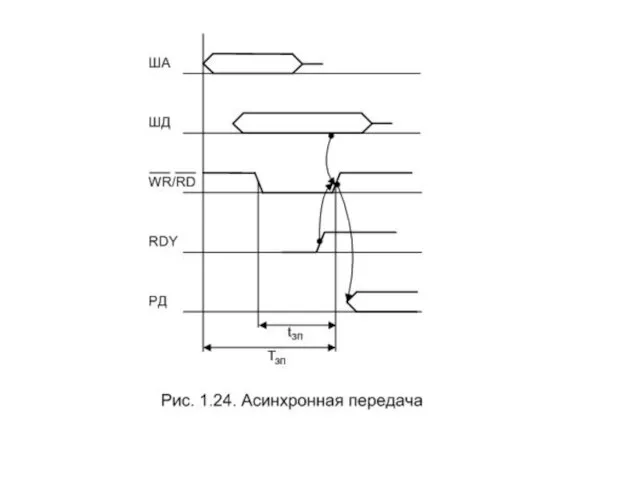
- 33. Асинхронный принцип синхронизации Используется при передаче блока (массива) данных. Начало и ко - нец блока помечается
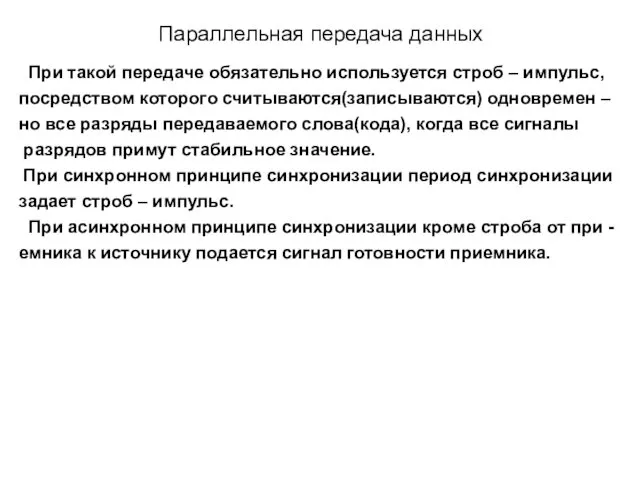
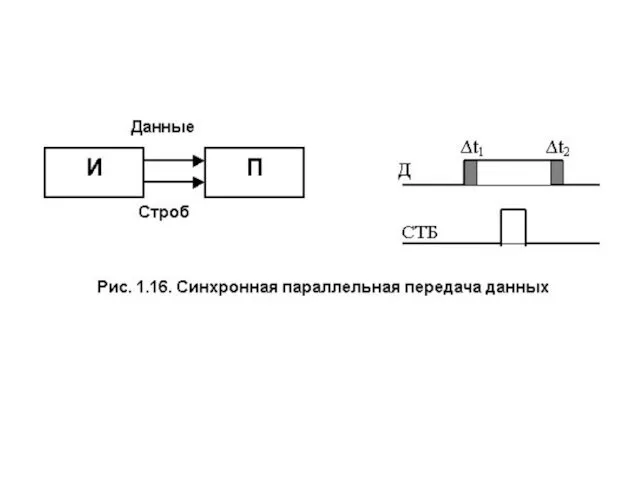
- 35. Параллельная передача данных При такой передаче обязательно используется строб – импульс, посредством которого считываются(записываются) одновремен –
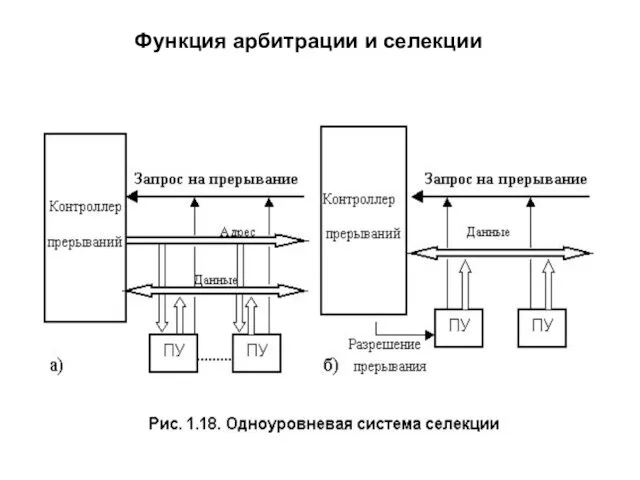
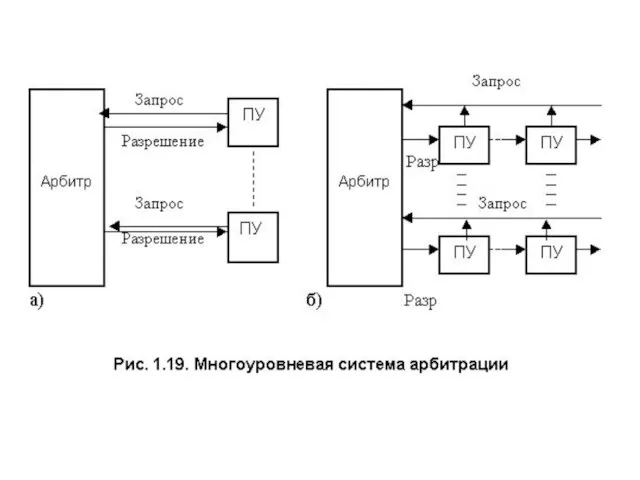
- 39. Функция арбитрации и селекции Способ разрешения коллизий, возникающих при обращении нескольких задатчиков к одной шине назовем
- 40. Функция арбитрации и селекции
- 42. Функция контроля: избыточное кодирование и режим тайм – аут. Функция преобразования: из параллельного кода в последовательный
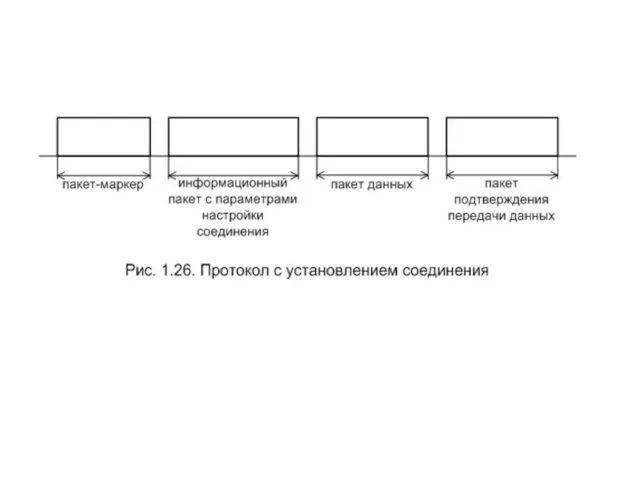
- 43. Протоколы передачи данных в компьютерных интерфейсах Алгоритмы протоколов передачи данных. Два этапа: захват шины и передача
- 44. 2-ой этап: 1. Задатчик устанавливает адрес исполнителя. 2. Задатчик устанавливает код (сигнал) команды. 3. При готовности
- 45. Параллельный интерфейс
- 50. Пследовательный интерфейс
- 53. Парллельный интерфейс
- 54. Системные интерфейсы, шины расширения ТЕМА 1.3
- 55. Шина PCI (Peripheral Component Interconnect) Базовая версия PCI: Тактовая частота шины 33 МГц, используется синхронная передача
- 56. Позже появляются следующие ключевые модификации шины: PCI 2.2 — допускается 64-бит ширина шины и/или тактовая частота
- 57. многопроцессорная; двухшинная архитектура; 32, 64 – разрядная адресация данных; синхронная шина; производительность 133 Мбайт/сек – 4,3
- 58. Пр Пр ОЗУ Контр. ОЗУ Авто конф. Арб. Исп. Зад. Мост П У PCI, ISA IDSEL
- 59. Базовые сигналы шины PCI AD[31-0] – адрес – данные; C/BE[3-0] – код команды, указатель байт; #FRAME
- 60. Декодирование команд шины PCI
- 61. Циклы шины Тц цикл tзад фаза ФА ФД1 ФД2 ФДn X.Xод Х.Ход Транзакция Циклы ожидания Цикл
- 62. Шина PCI Express Последовательная системная шина общего назначения; Имя — PCI Express, на стадии проектирования была
- 63. Используется избыточное защищенное от помех кодирование — каждый байт при передаче представляется десятью битами; Пропускная способность
- 64. Тема 1.4. Интерфейсы периферийных устройств (Centronics, RS232, SCSI, USB)
- 65. Параллельный интерфейс: LPT-порт
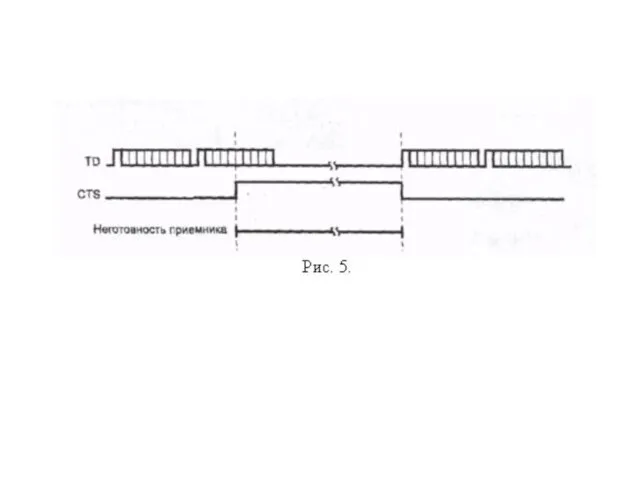
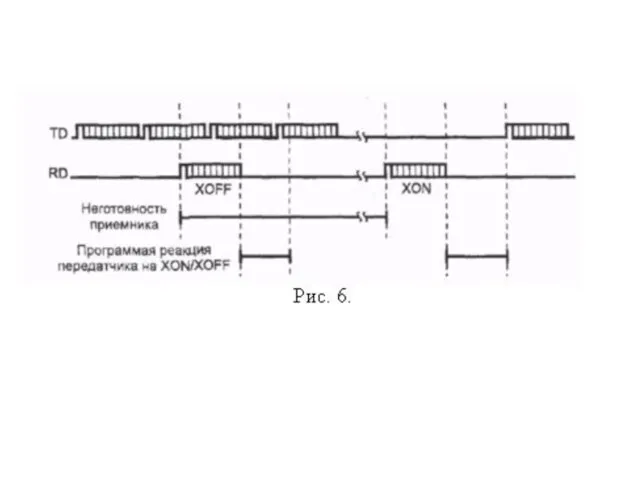
- 68. Последовательные интерфейсы: СОМ-порт
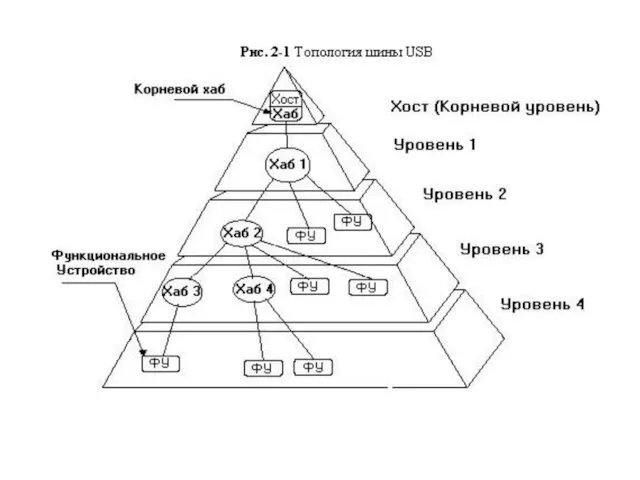
- 72. Шина USB (Universal Systems Interface)
- 73. Архитектура шины USB 1. Последовательная передача данных. 2. Полудуплексный режим передачи. 3. Принцип действия – сетевой
- 74. Структура шины Структура имеет топологию – многоуровневой звезды. В ней используются сетевые принципы построения шины. В
- 76. СТРУКТУРА ХАБА БУ Восходящий порт … БУ Восходящий порт …
- 78. Физический интерфейс USB Кабель имеет 4 провода: два для передачи сигналов(Д+ и Д -), два для
- 80. Кодирование информации Используется NRZI – кодирование. 0 1 1 0 1 0 1 0 0 0
- 82. Типы передачи данных 1. Управляющие – конфигурирование и управление устройствами. Количество данных – не более 64
- 83. ТИПЫ ПЕРЕДАЧИ ДАННЫХ
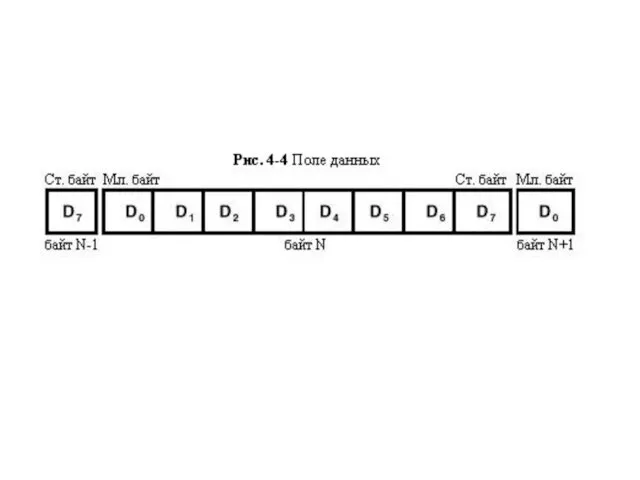
- 84. Модель передачи данных Данные передаются между хост– контроллером и функцией(ПУ) в виде потоков информации. Управляет всеми
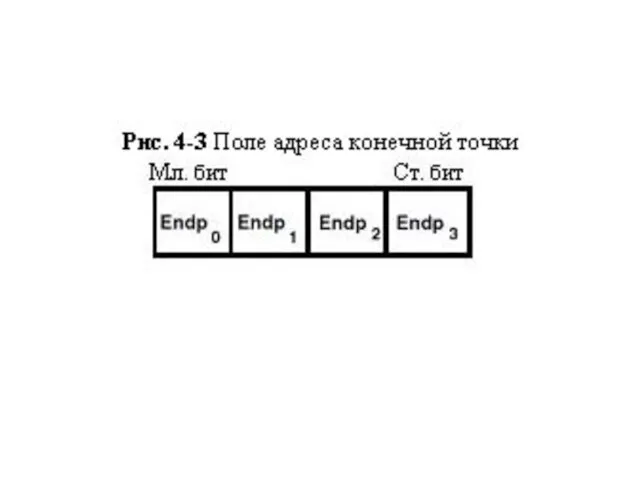
- 85. Характеристики конечной точки 1.Требуемая частота доступа и задержка обслуживания. 2. Тpебуемая частота прoпускания канала. 3. Номер
- 86. Структура модели Драйвер USB EP EP EP EP EP0 Драйверы устройств интерфейсы Устройство USB Каналы Каналы
- 87. Протокол шины USB Протокол шины USB обеспечивает обмен данными между хостом и ус - тройством. Используется
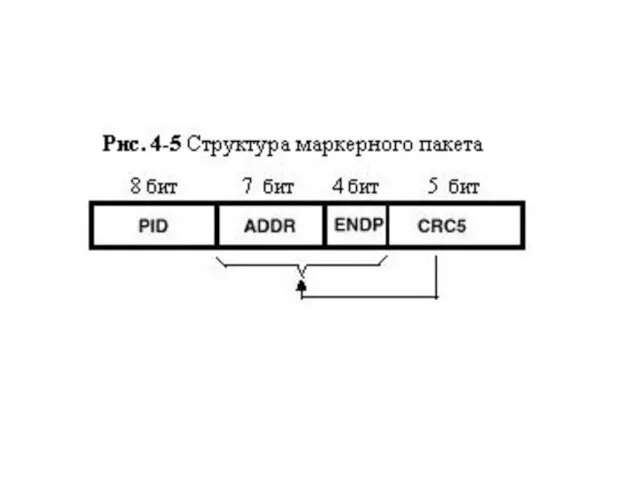
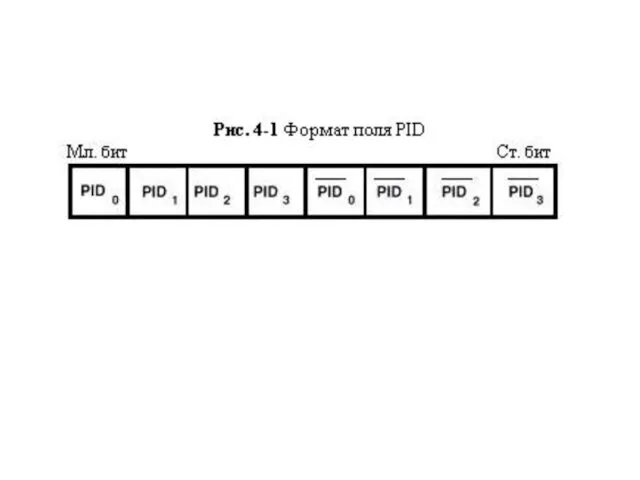
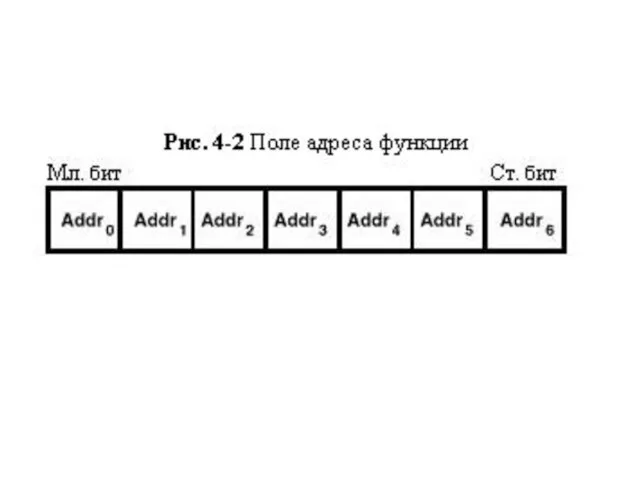
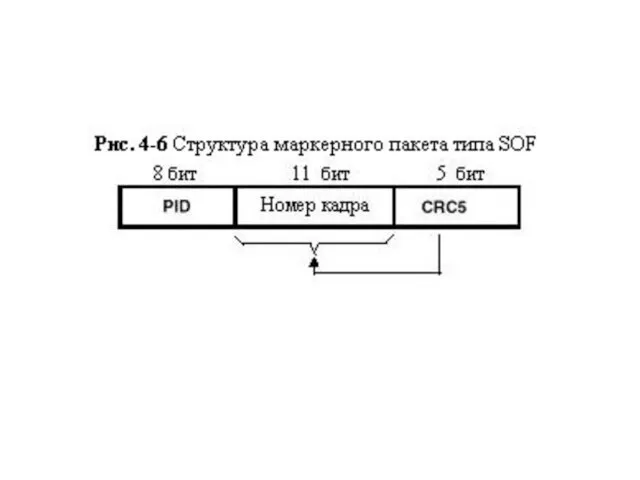
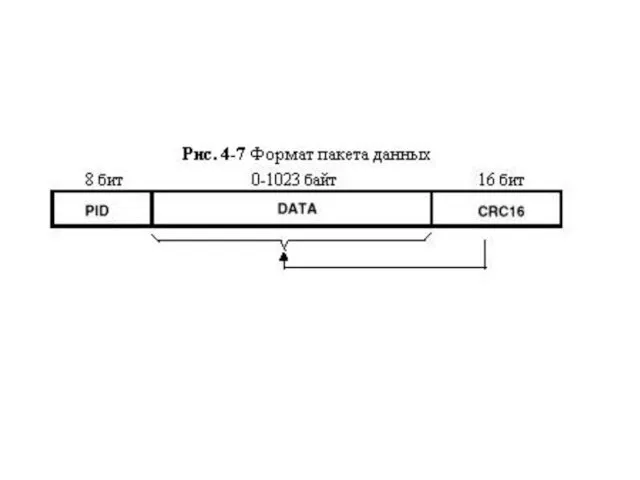
- 88. Транзакции и пакеты Транзакция содержит определенную последовательность пкетов. Пакет начинается с синхропоследовательности, один байт(USB1) – В
- 97. Типы пакетов квитирования ACK – подтверждение безошибочного приема пакета. NAK – индикация занятости конечной точки. STALL
- 100. Рис. 4.10а. Формат прерывания
- 101. Рис. 4.10б. Формат изохронных передач
- 103. Скачать презентацию
Тема 1.1.
Основные принципы построения систем ввода вывода и интерфейсов
Тема 1.1.
Основные принципы построения систем ввода вывода и интерфейсов
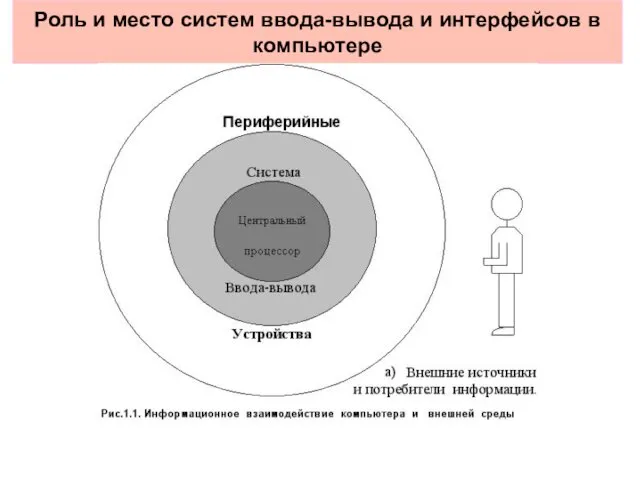
Роль и место систем ввода-вывода и интерфейсов в компьютере
Роль и место систем ввода-вывода и интерфейсов в компьютере
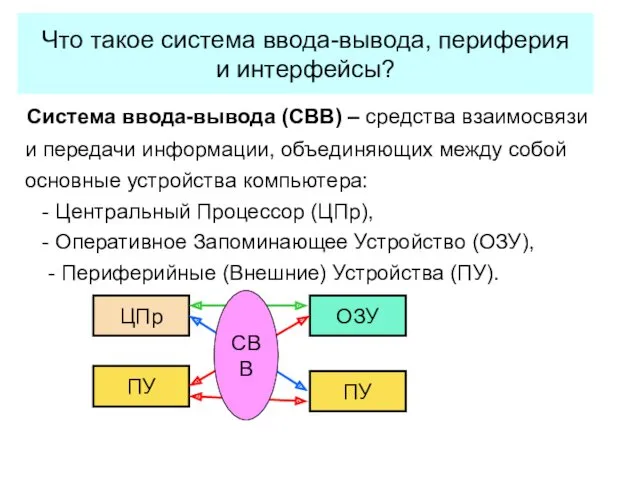
Что такое система ввода-вывода, периферия
и интерфейсы?
Система ввода-вывода (СВВ) – средства
Что такое система ввода-вывода, периферия
и интерфейсы?
Система ввода-вывода (СВВ) – средства
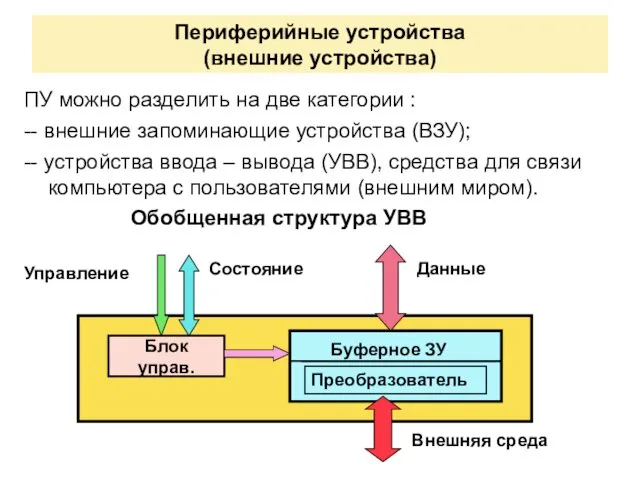
Периферийные устройства
(внешние устройства)
ПУ можно разделить на две категории :
-- внешние запоминающие
Периферийные устройства
(внешние устройства)
ПУ можно разделить на две категории :
-- внешние запоминающие
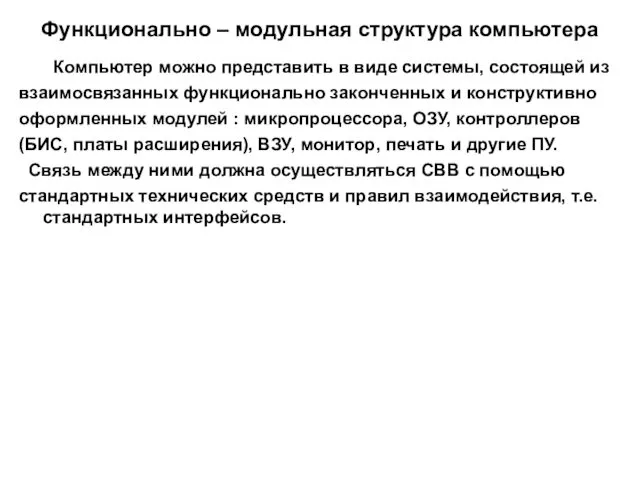
Функционально – модульная структура компьютера
Компьютер можно представить в виде системы,
Функционально – модульная структура компьютера
Компьютер можно представить в виде системы,

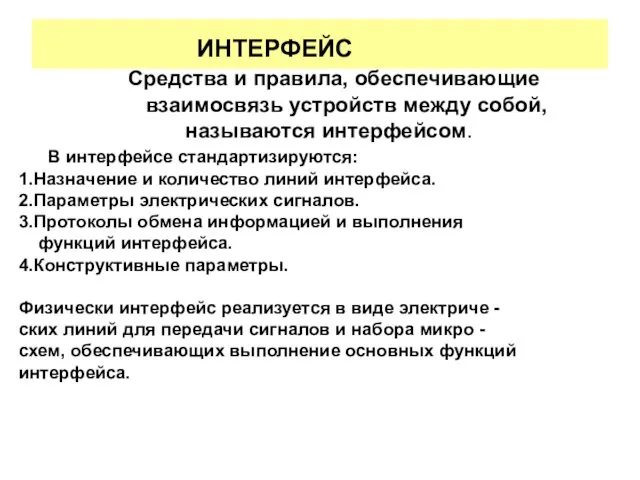
ИНТЕРФЕЙС
Средства и правила, обеспечивающие
взаимосвязь устройств между собой,
ИНТЕРФЕЙС
Средства и правила, обеспечивающие
взаимосвязь устройств между собой,
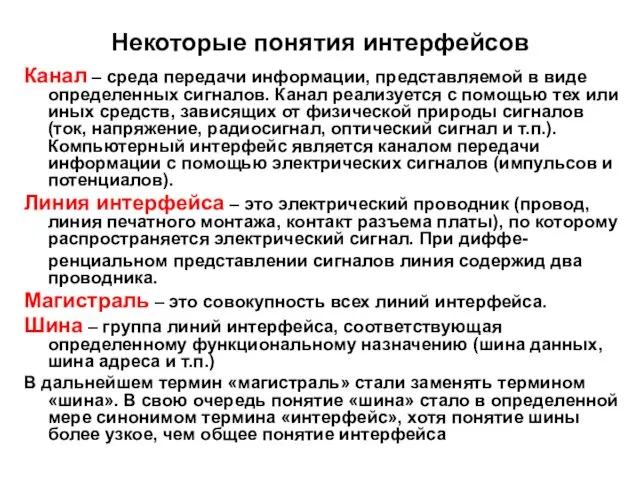
Некоторые понятия интерфейсов
Канал – среда передачи информации, представляемой в виде определенных
Некоторые понятия интерфейсов
Канал – среда передачи информации, представляемой в виде определенных
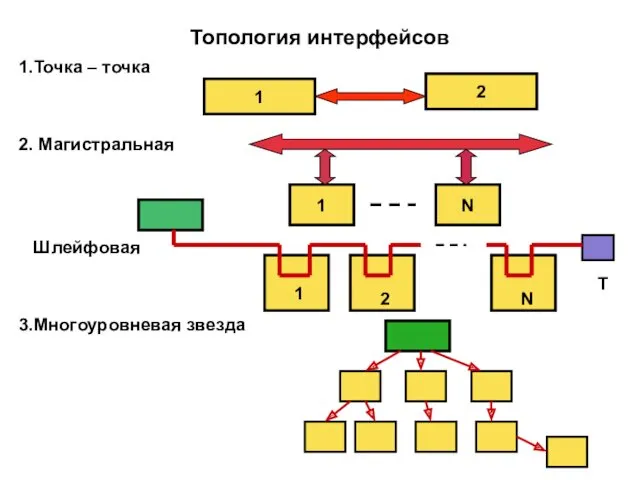
Топология интерфейсов
1.Точка – точка
2. Магистральная
Шлейфовая
3.Многоуровневая звезда
1
2
1
N
1
2
N
T
Топология интерфейсов
1.Точка – точка
2. Магистральная
Шлейфовая
3.Многоуровневая звезда
1
2
1
N
1
2
N
T
Классификация интерфейсов
Существует множество стандартных компьютерных интерфейсов
различного назначения, обладающих своими особенностями
Классификация интерфейсов
Существует множество стандартных компьютерных интерфейсов
различного назначения, обладающих своими особенностями
2.По организации обмена.
а) Симплексный – передача в одну сторону.
2.По организации обмена.
а) Симплексный – передача в одну сторону.
3. ПО архитектуре интерфейсов.
1. Параллельный интерфейс:
а) трехшинный –
3. ПО архитектуре интерфейсов.
1. Параллельный интерфейс:
а) трехшинный –
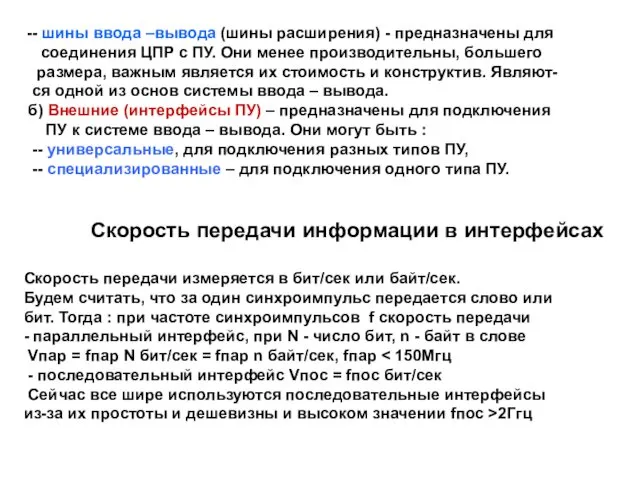
-- шины ввода –вывода (шины расширения) - предназначены для
соединения
-- шины ввода –вывода (шины расширения) - предназначены для
соединения
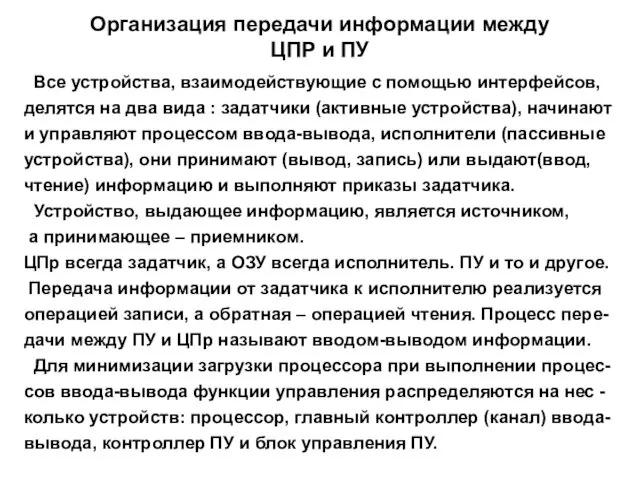
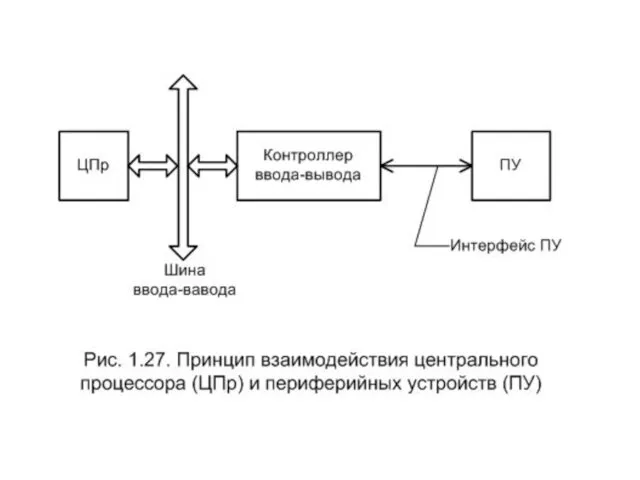
Организация передачи информации между
ЦПР и ПУ
Все устройства, взаимодействующие с помощью
Организация передачи информации между
ЦПР и ПУ
Все устройства, взаимодействующие с помощью
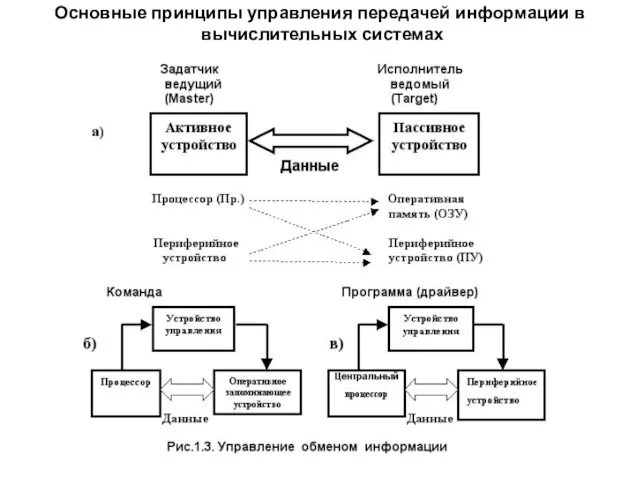
Основные принципы управления передачей информации в
вычислительных системах
Основные принципы управления передачей информации в
вычислительных системах
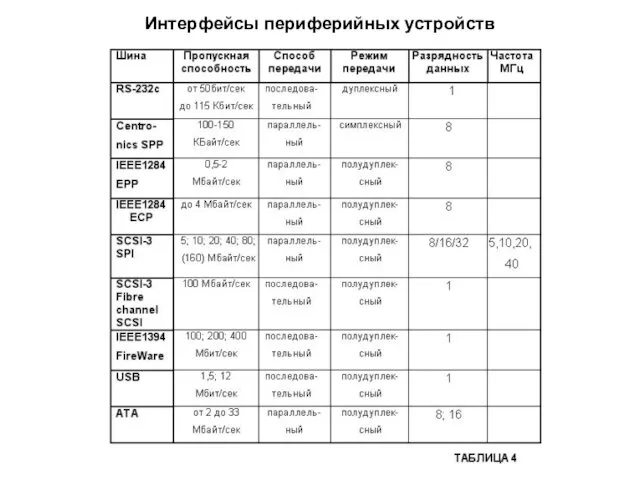
Интерфейсы периферийных устройств
Интерфейсы периферийных устройств
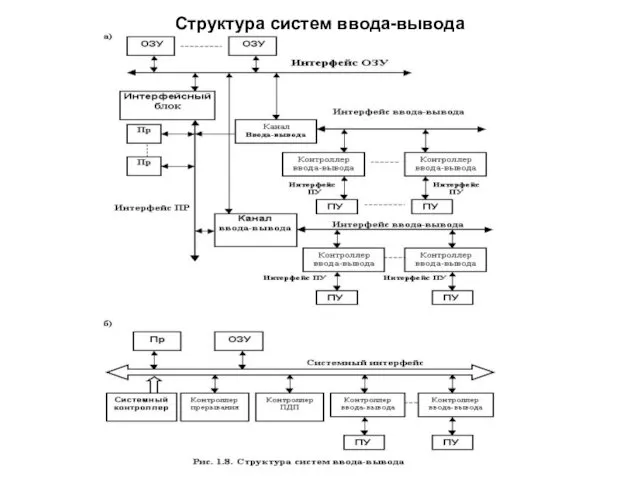
Структура систем ввода-вывода
Структура систем ввода-вывода
Тема 1.2.
Основные функции и принципы построения интерфейсов
Тема 1.2.
Основные функции и принципы построения интерфейсов

Основные функции интерфейсов
1. Передача информации.
2. Синхронизация передачи информации.
3. Арбитрация, селекция.
4. Контроль
Основные функции интерфейсов
1. Передача информации.
2. Синхронизация передачи информации.
3. Арбитрация, селекция.
4. Контроль
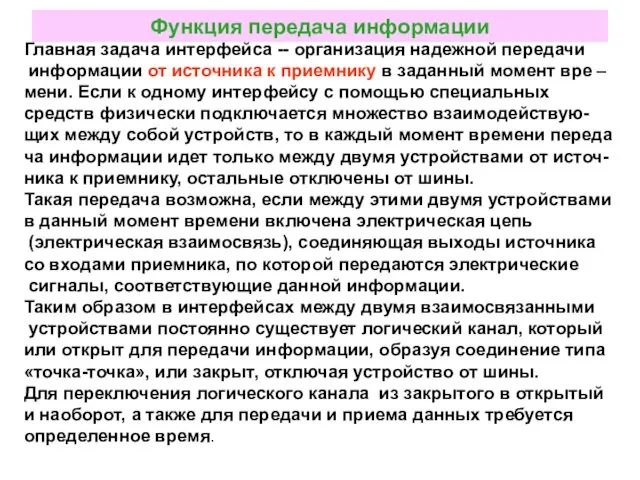
Функция передача информации
Главная задача интерфейса -- организация надежной передачи
информации
Функция передача информации
Главная задача интерфейса -- организация надежной передачи
информации
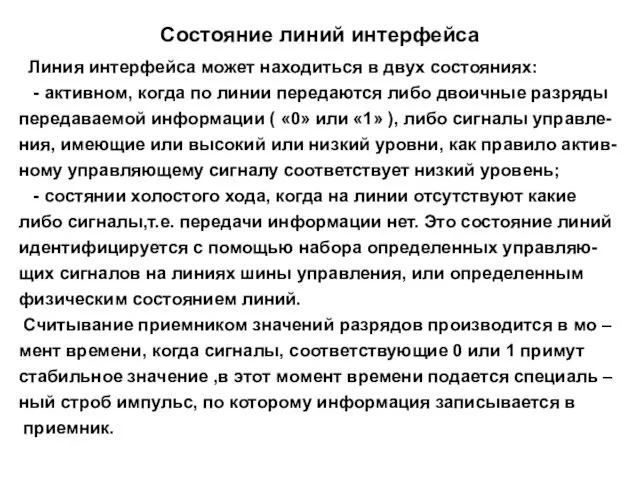
Состояние линий интерфейса
Линия интерфейса может находиться в двух состояниях:
Состояние линий интерфейса
Линия интерфейса может находиться в двух состояниях:
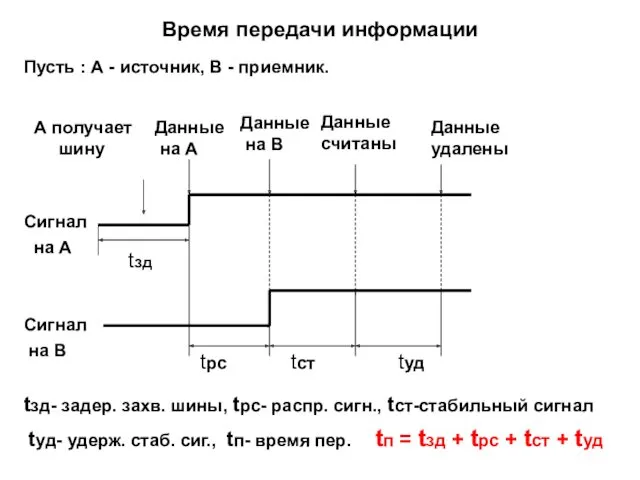
Время передачи информации
Пусть : А - источник, В - приемник.
Сигнал
на
Время передачи информации
Пусть : А - источник, В - приемник.
Сигнал
на
Транзакции и операции интерфейса
Данные по линиям интерфейса передаются блоками. Блок, со
Транзакции и операции интерфейса
Данные по линиям интерфейса передаются блоками. Блок, со
Функция синхронизации
При передаче информации источник должен знать, когда можно
начинать
Функция синхронизации
При передаче информации источник должен знать, когда можно
начинать
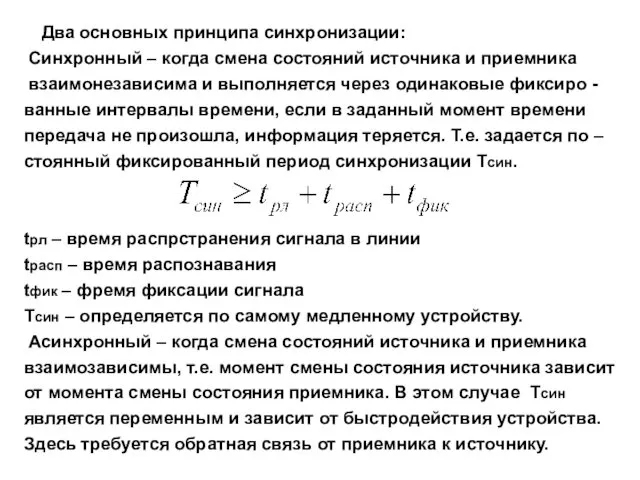
Два основных принципа синхронизации:
Синхронный – когда смена состояний источника
Два основных принципа синхронизации:
Синхронный – когда смена состояний источника
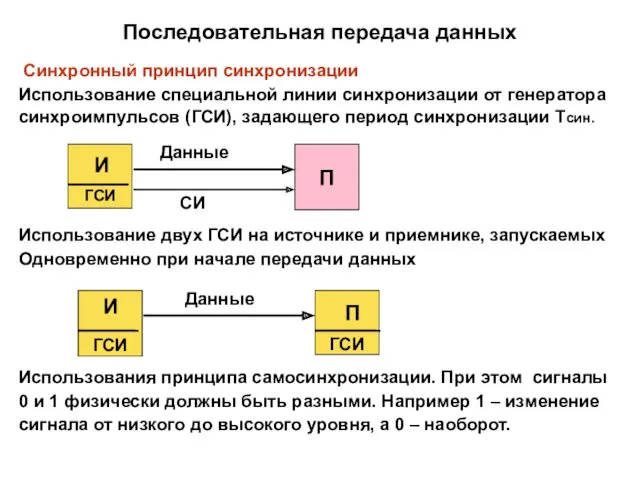
Последовательная передача данных
Синхронный принцип синхронизации
Использование специальной линии синхронизации от генератора
синхроимпульсов
Последовательная передача данных
Синхронный принцип синхронизации
Использование специальной линии синхронизации от генератора
синхроимпульсов
Асинхронный принцип синхронизации
Используется при передаче блока (массива) данных. Начало и ко
Асинхронный принцип синхронизации
Используется при передаче блока (массива) данных. Начало и ко
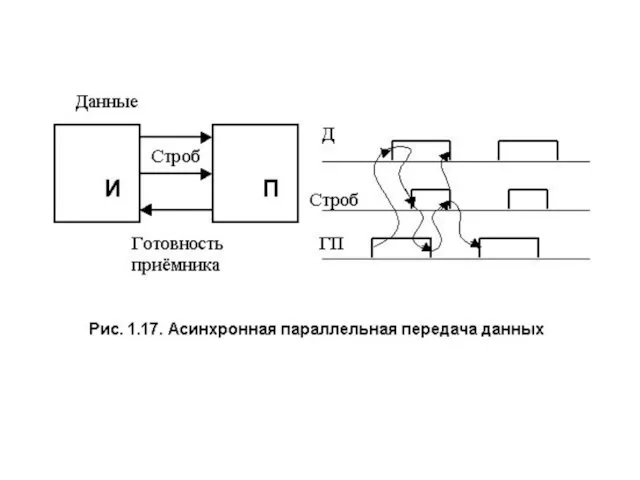
Параллельная передача данных
При такой передаче обязательно используется строб – импульс,
посредством
Параллельная передача данных
При такой передаче обязательно используется строб – импульс,
посредством
Функция арбитрации и селекции
Способ разрешения коллизий, возникающих при обращении
нескольких задатчиков
Функция арбитрации и селекции
Способ разрешения коллизий, возникающих при обращении
нескольких задатчиков
Функция арбитрации и селекции
Функция арбитрации и селекции
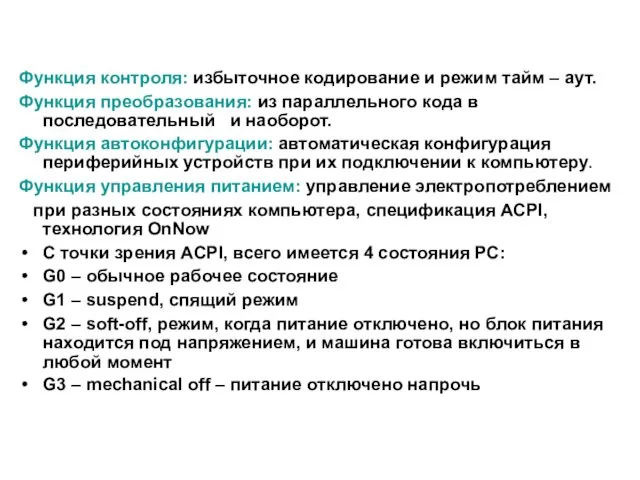
Функция контроля: избыточное кодирование и режим тайм – аут.
Функция преобразования: из
Функция преобразования: из
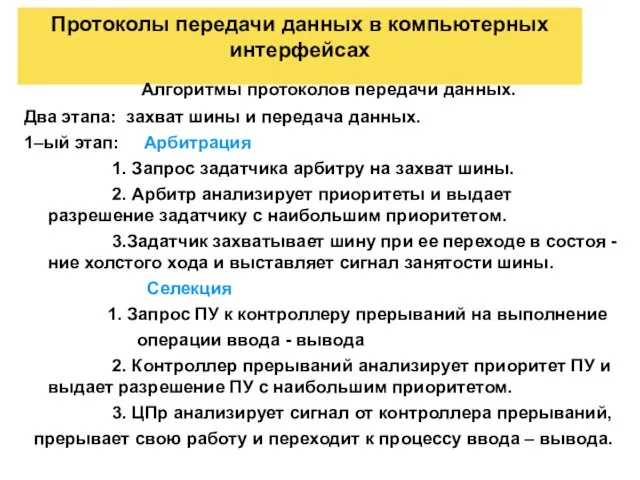
Протоколы передачи данных в компьютерных интерфейсах
Алгоритмы протоколов передачи данных.
Два этапа:
Протоколы передачи данных в компьютерных интерфейсах
Алгоритмы протоколов передачи данных.
Два этапа:
2-ой этап: 1. Задатчик устанавливает адрес исполнителя.
2. Задатчик устанавливает код
2. Задатчик устанавливает код
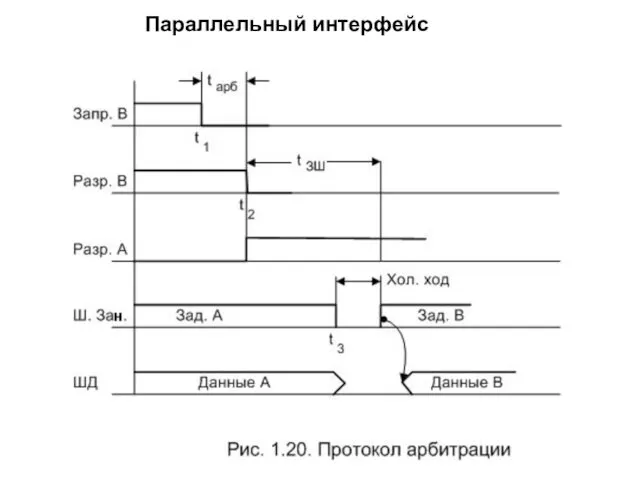
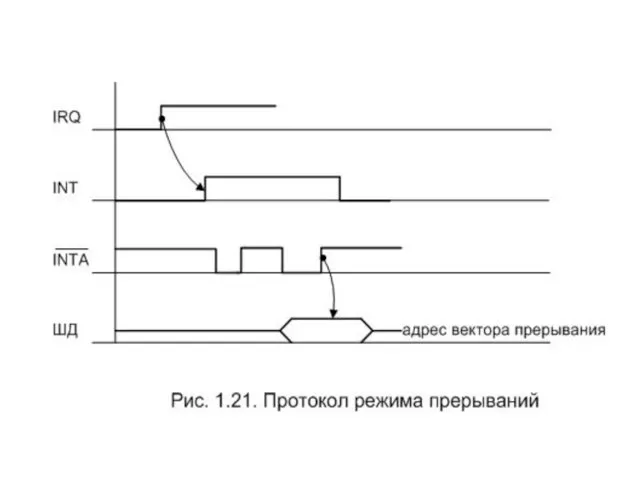
Параллельный интерфейс
Параллельный интерфейс
Пследовательный интерфейс
Пследовательный интерфейс
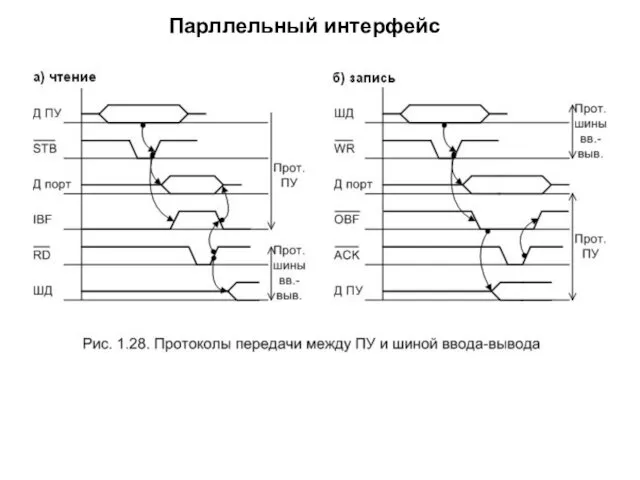
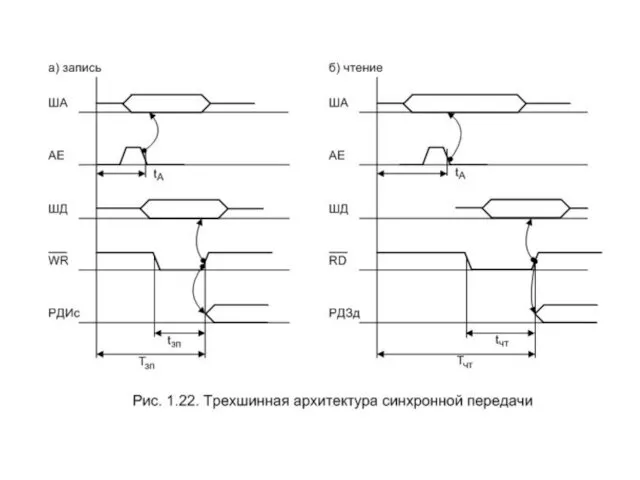
Парллельный интерфейс
Парллельный интерфейс
Системные интерфейсы,
шины расширения
ТЕМА 1.3
Системные интерфейсы,
шины расширения
ТЕМА 1.3
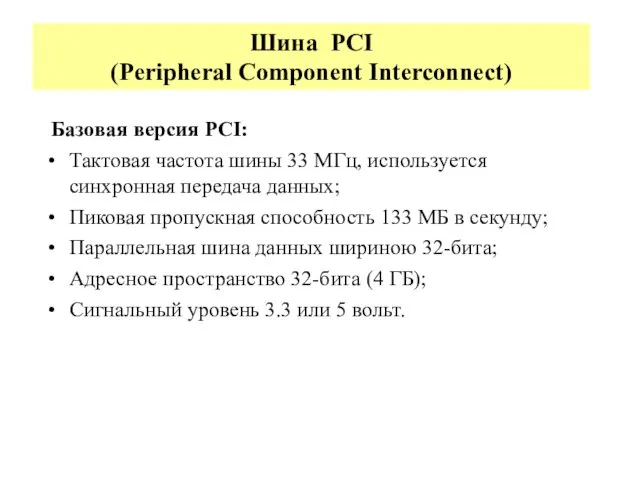
Шина PCI
(Peripheral Component Interconnect)
Базовая версия PCI:
Тактовая частота шины 33
Шина PCI
(Peripheral Component Interconnect)
Базовая версия PCI:
Тактовая частота шины 33
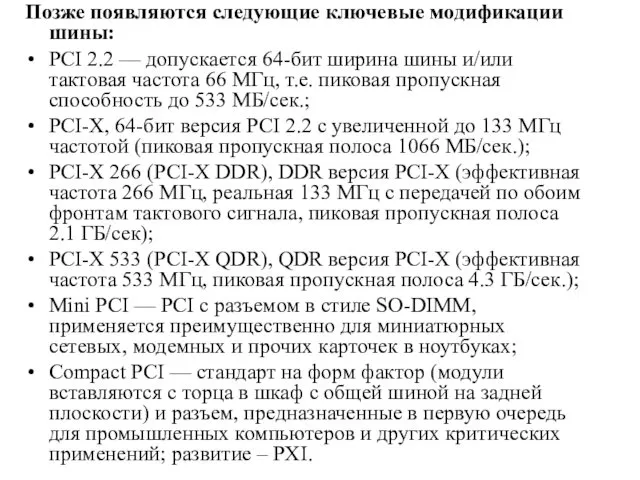
Позже появляются следующие ключевые модификации шины:
PCI 2.2 — допускается 64-бит ширина
Позже появляются следующие ключевые модификации шины:
PCI 2.2 — допускается 64-бит ширина
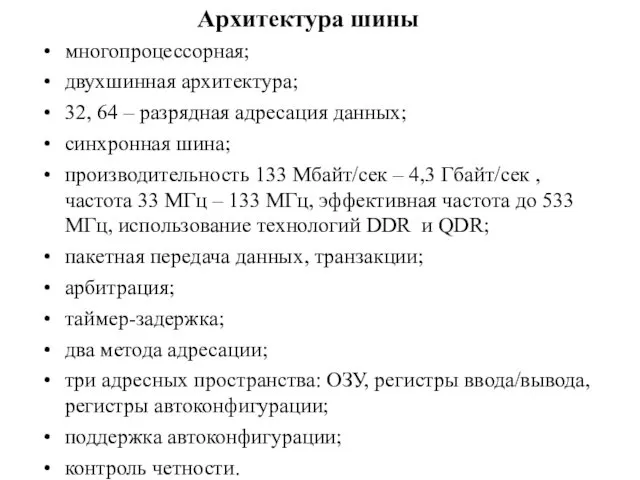
многопроцессорная;
двухшинная архитектура;
32, 64 – разрядная адресация данных;
синхронная шина;
производительность 133 Мбайт/сек –
многопроцессорная;
двухшинная архитектура;
32, 64 – разрядная адресация данных;
синхронная шина;
производительность 133 Мбайт/сек –
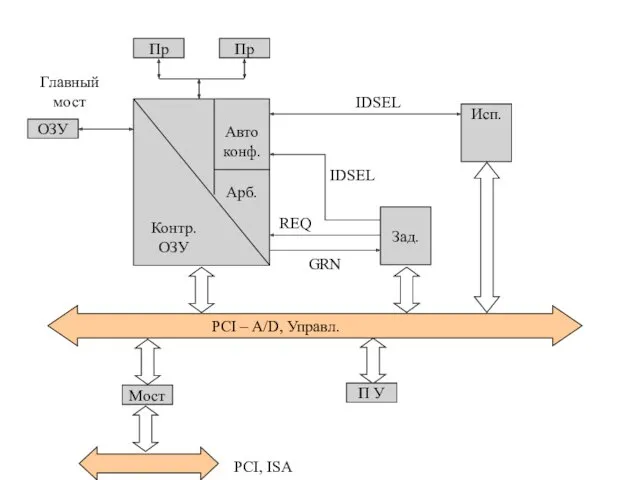
Пр
Пр
ОЗУ
Контр. ОЗУ
Авто конф.
Арб.
Исп.
Зад.
Мост
П У
PCI, ISA
IDSEL
IDSEL
GRN
REQ
Главный мост
PCI – A/D, Управл.
Пр
Пр
ОЗУ
Контр. ОЗУ
Авто конф.
Арб.
Исп.
Зад.
Мост
П У
PCI, ISA
IDSEL
IDSEL
GRN
REQ
Главный мост
PCI – A/D, Управл.
![Базовые сигналы шины PCI AD[31-0] – адрес – данные; C/BE[3-0]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/107368/slide-58.jpg)
Базовые сигналы шины PCI
AD[31-0] – адрес – данные;
C/BE[3-0] – код команды,
Базовые сигналы шины PCI
AD[31-0] – адрес – данные;
C/BE[3-0] – код команды,
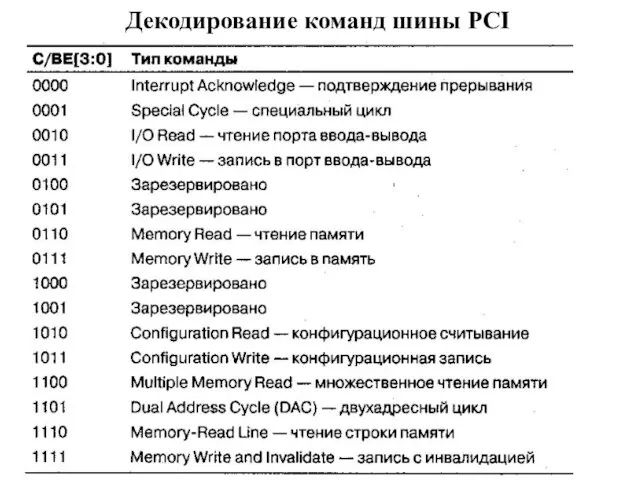
Декодирование команд шины PCI
Декодирование команд шины PCI
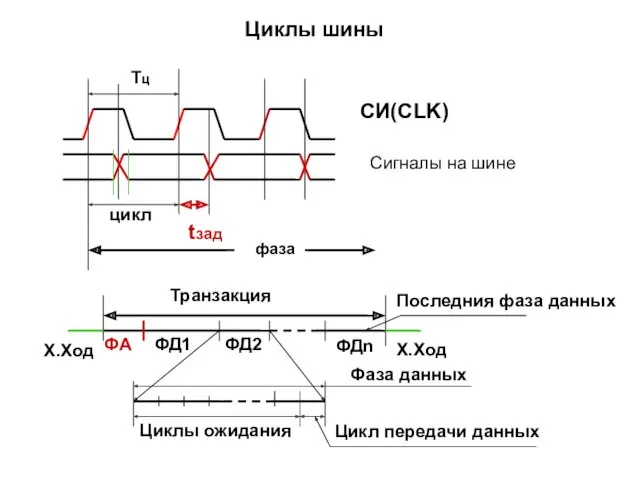
Циклы шины
Тц
цикл
tзад
фаза
ФА
ФД1
ФД2
ФДn
X.Xод
Х.Ход
Транзакция
Циклы ожидания
Цикл передачи данных
Фаза данных
Последния фаза данных
СИ(CLK)
Сигналы на шине
Циклы шины
Тц
цикл
tзад
фаза
ФА
ФД1
ФД2
ФДn
X.Xод
Х.Ход
Транзакция
Циклы ожидания
Цикл передачи данных
Фаза данных
Последния фаза данных
СИ(CLK)
Сигналы на шине
Шина PCI Express
Последовательная системная шина общего назначения;
Имя — PCI Express,
Шина PCI Express
Последовательная системная шина общего назначения;
Имя — PCI Express,
Используется избыточное защищенное от помех кодирование — каждый байт при передаче
Используется избыточное защищенное от помех кодирование — каждый байт при передаче
Тема 1.4.
Интерфейсы периферийных устройств (Centronics, RS232, SCSI, USB)
Тема 1.4.
Интерфейсы периферийных устройств (Centronics, RS232, SCSI, USB)
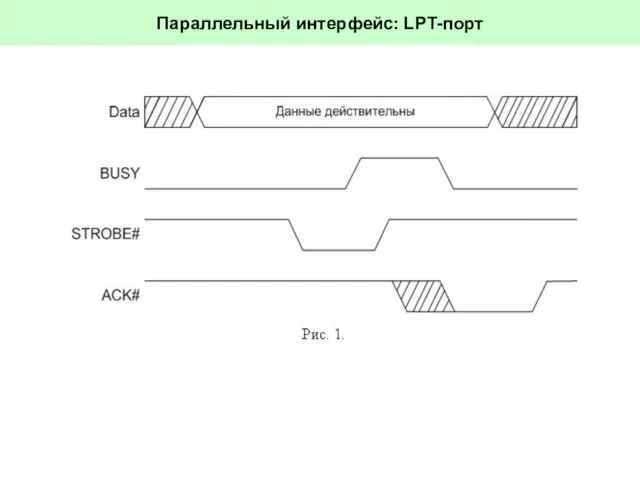
Параллельный интерфейс: LPT-порт
Параллельный интерфейс: LPT-порт

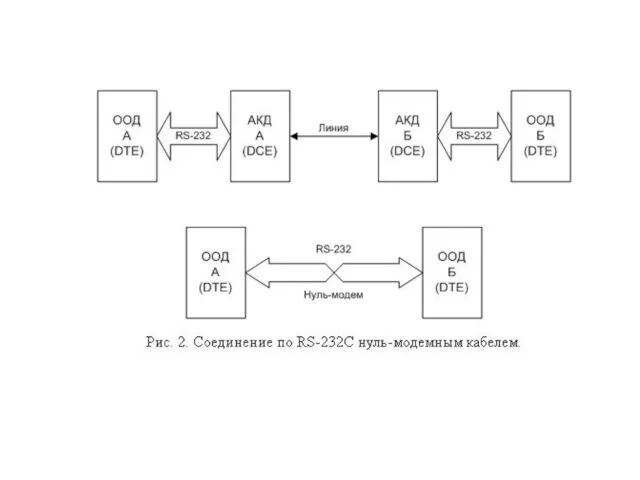
Последовательные интерфейсы: СОМ-порт
Последовательные интерфейсы: СОМ-порт

Шина USB
(Universal Systems Interface)
Шина USB
(Universal Systems Interface)
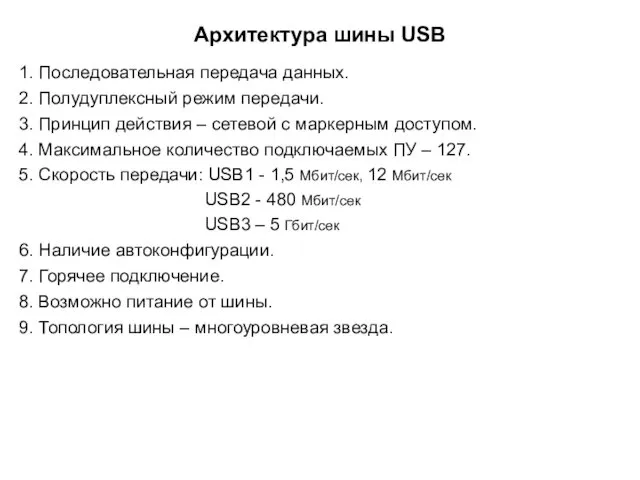
Архитектура шины USB
1. Последовательная передача данных.
2. Полудуплексный режим передачи.
3. Принцип действия
Архитектура шины USB
1. Последовательная передача данных.
2. Полудуплексный режим передачи.
3. Принцип действия
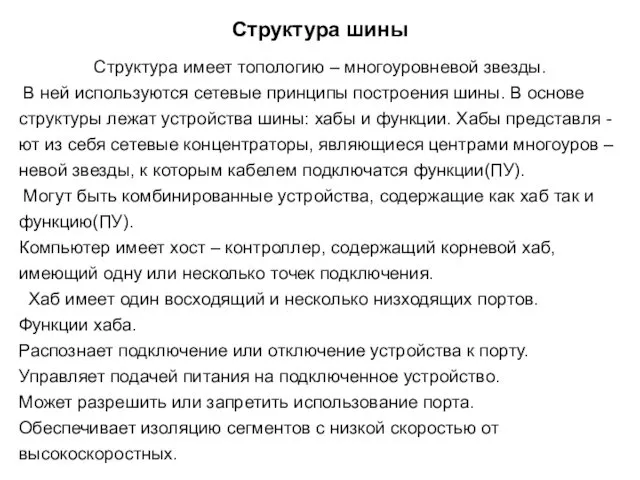
Структура шины
Структура имеет топологию – многоуровневой звезды.
В ней используются сетевые
Структура шины
Структура имеет топологию – многоуровневой звезды.
В ней используются сетевые
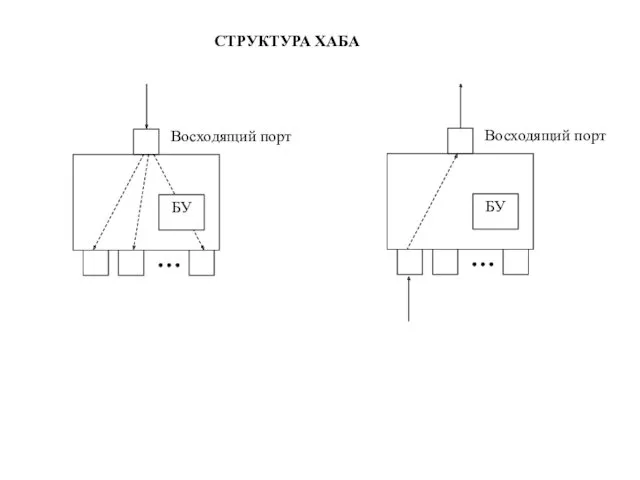
СТРУКТУРА ХАБА
БУ
Восходящий порт
…
БУ
Восходящий порт
…
СТРУКТУРА ХАБА
БУ
Восходящий порт
…
БУ
Восходящий порт
…
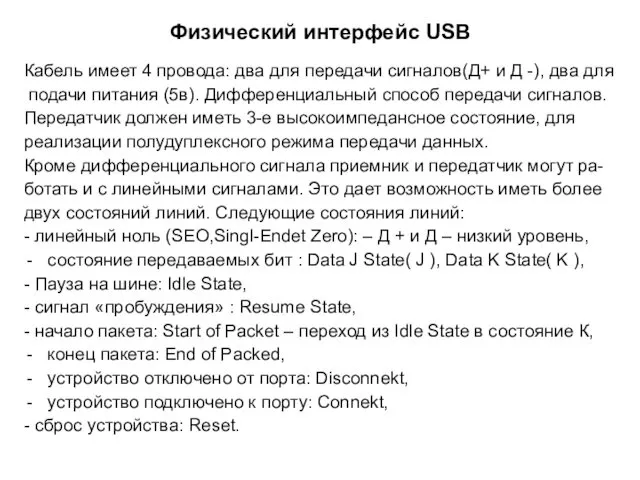
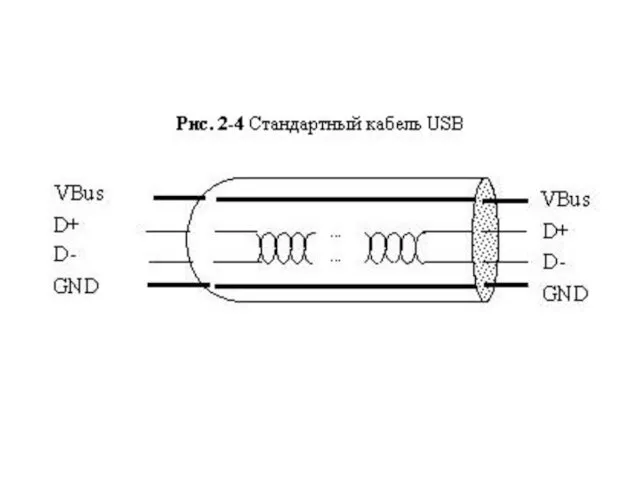
Физический интерфейс USB
Кабель имеет 4 провода: два для передачи сигналов(Д+ и
Физический интерфейс USB
Кабель имеет 4 провода: два для передачи сигналов(Д+ и
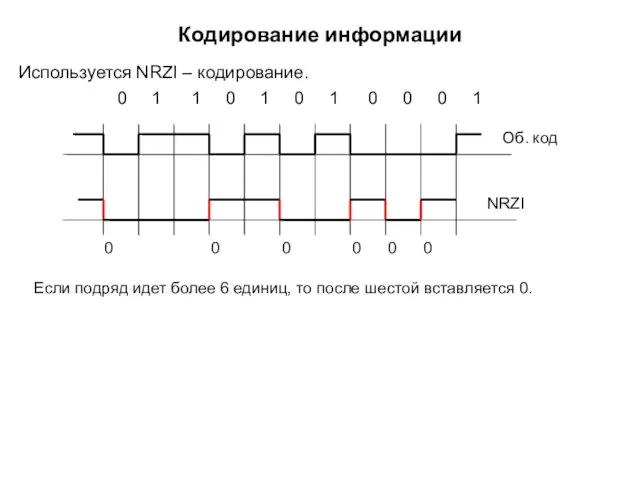
Кодирование информации
Используется NRZI – кодирование.
0 1 1 0 1 0
Кодирование информации
Используется NRZI – кодирование.
0 1 1 0 1 0

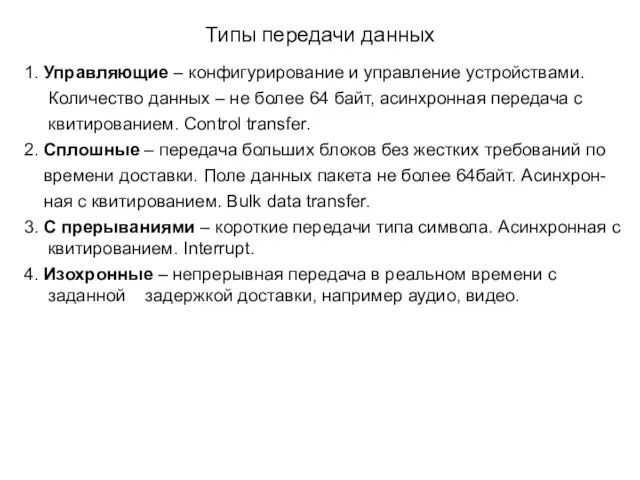
Типы передачи данных
1. Управляющие – конфигурирование и управление устройствами.
Количество данных
Типы передачи данных
1. Управляющие – конфигурирование и управление устройствами.
Количество данных
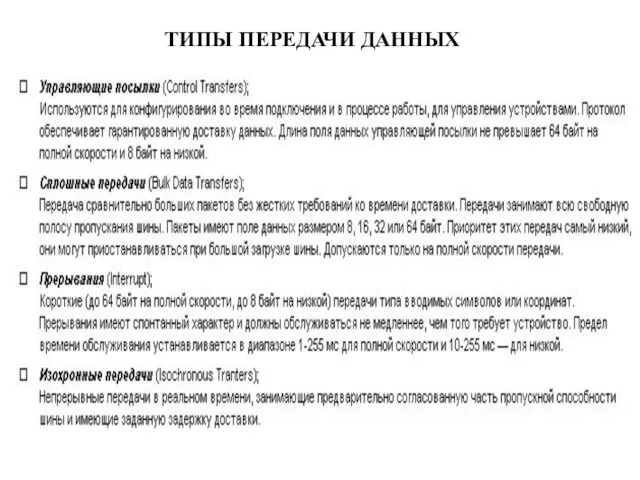
ТИПЫ ПЕРЕДАЧИ ДАННЫХ
ТИПЫ ПЕРЕДАЧИ ДАННЫХ
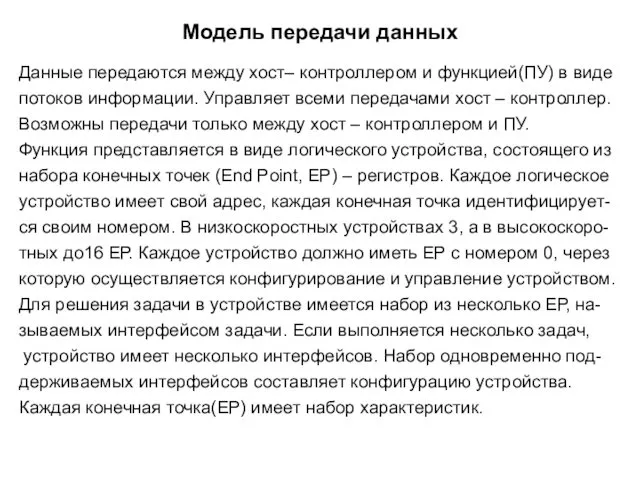
Модель передачи данных
Данные передаются между хост– контроллером и функцией(ПУ) в виде
потоков
Модель передачи данных
Данные передаются между хост– контроллером и функцией(ПУ) в виде
потоков
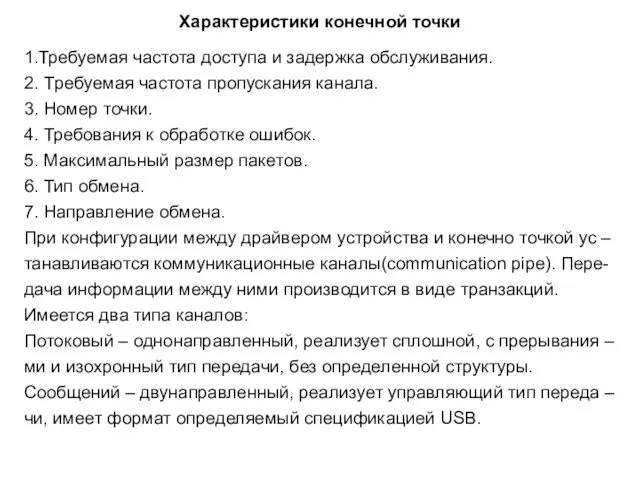
Характеристики конечной точки
1.Требуемая частота доступа и задержка обслуживания.
2. Тpебуемая частота прoпускания
Характеристики конечной точки
1.Требуемая частота доступа и задержка обслуживания.
2. Тpебуемая частота прoпускания
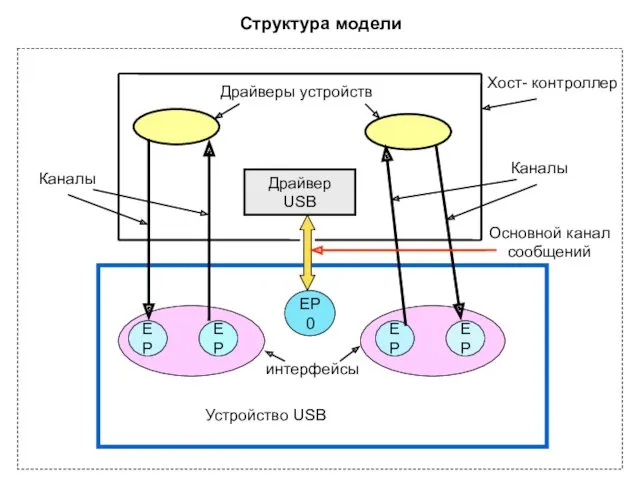
Структура модели
Драйвер
USB
EP
EP
EP
EP
EP0
Драйверы устройств
интерфейсы
Устройство USB
Каналы
Каналы
Хост- контроллер
Основной канал
сообщений
Структура модели
Драйвер
USB
EP
EP
EP
EP
EP0
Драйверы устройств
интерфейсы
Устройство USB
Каналы
Каналы
Хост- контроллер
Основной канал
сообщений
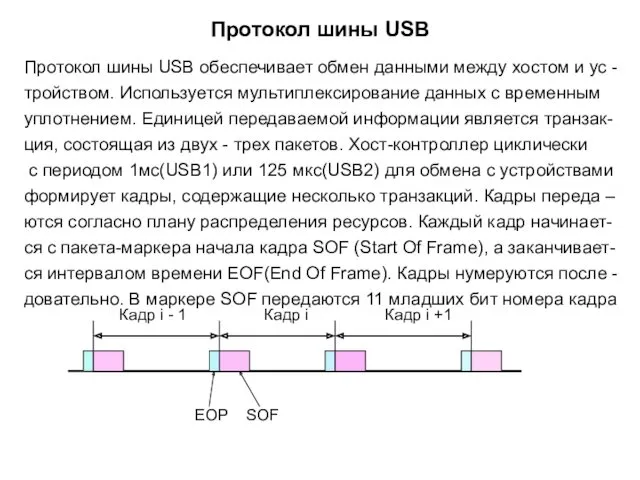
Протокол шины USB
Протокол шины USB обеспечивает обмен данными между хостом и
Протокол шины USB
Протокол шины USB обеспечивает обмен данными между хостом и
Транзакции и пакеты
Транзакция содержит определенную последовательность пкетов.
Пакет начинается с синхропоследовательности, один
Транзакции и пакеты
Транзакция содержит определенную последовательность пкетов.
Пакет начинается с синхропоследовательности, один
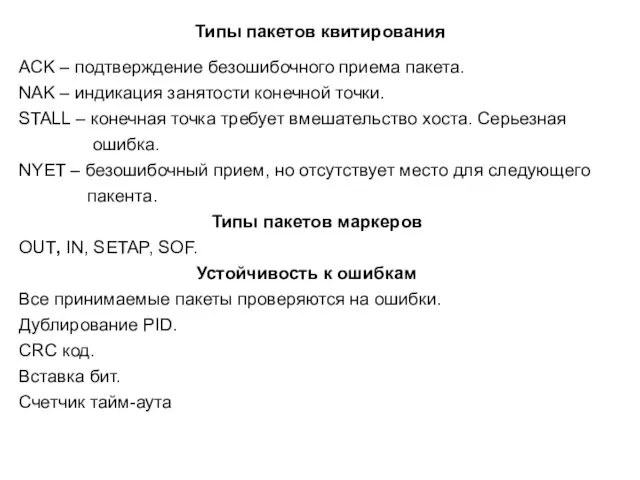
Типы пакетов квитирования
ACK – подтверждение безошибочного приема пакета.
NAK – индикация занятости
Типы пакетов квитирования
ACK – подтверждение безошибочного приема пакета.
NAK – индикация занятости
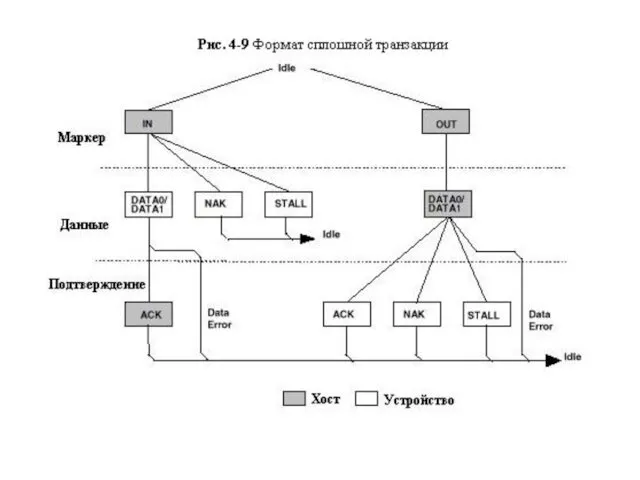
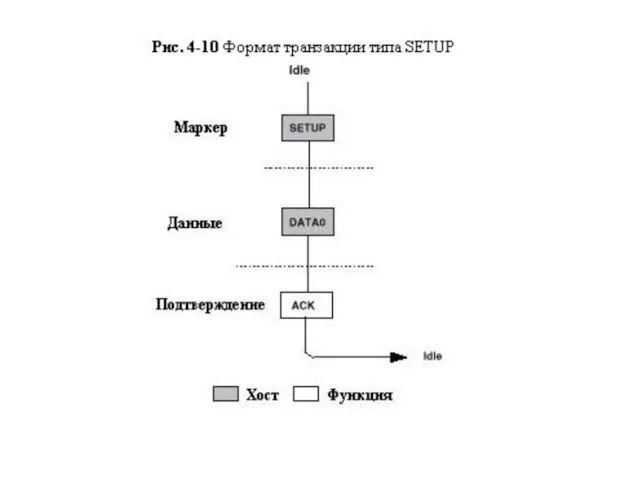
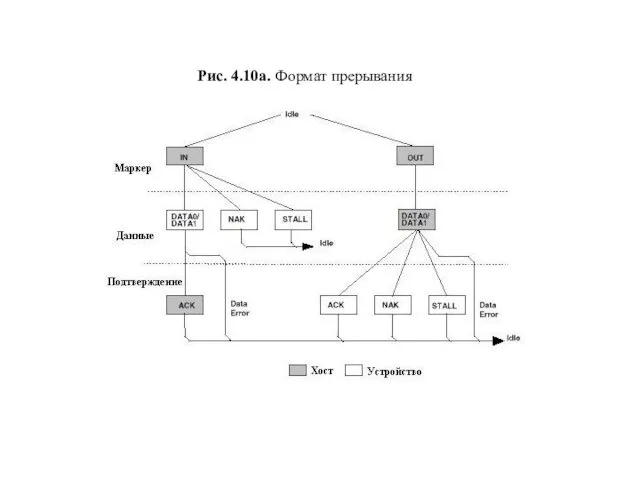
Рис. 4.10а. Формат прерывания
Рис. 4.10а. Формат прерывания
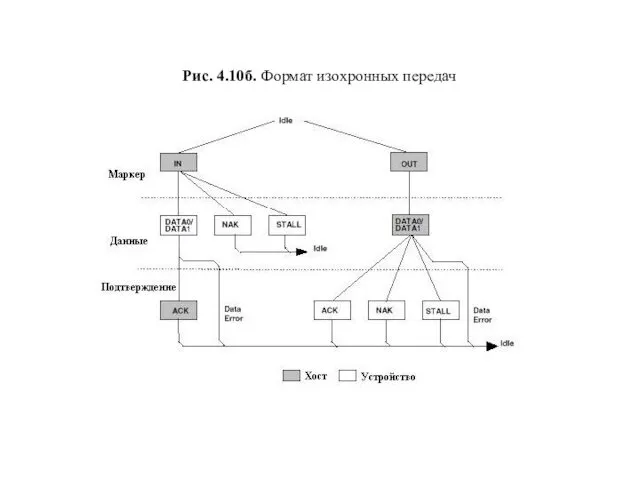
Рис. 4.10б. Формат изохронных передач
Рис. 4.10б. Формат изохронных передач
 Военно-промышленный комплекс России
Военно-промышленный комплекс России Моя профессия - моё будущее (техник по компьютерным системам и комплексам)
Моя профессия - моё будущее (техник по компьютерным системам и комплексам) Система соціального забезпечення як технологія соціальної роботи
Система соціального забезпечення як технологія соціальної роботи Рекламная деятельность в сети Интернет
Рекламная деятельность в сети Интернет Процессы и аппараты обогащения. Магнитные, электрические, специальные методы
Процессы и аппараты обогащения. Магнитные, электрические, специальные методы Презентация для родителей ФГОС - зачем и почему?
Презентация для родителей ФГОС - зачем и почему? Презентация к аттестации
Презентация к аттестации К. Г. Паустовский Растрепанный воробей
К. Г. Паустовский Растрепанный воробей Формирование и развитие региональных рынков. Виды региональных рынков
Формирование и развитие региональных рынков. Виды региональных рынков Случаи вычитания 14-
Случаи вычитания 14- Рандомизированные клинические испытания
Рандомизированные клинические испытания Невербальные коммуникации. Движение тела
Невербальные коммуникации. Движение тела Объемно-планировочные параметры одноэтажных промышленных зданий
Объемно-планировочные параметры одноэтажных промышленных зданий Мы любим своих детей
Мы любим своих детей Особенности речевого развития у детей с перинатальным поражением ЦНС
Особенности речевого развития у детей с перинатальным поражением ЦНС Юридические лица как субъекты гражданских правоотношений
Юридические лица как субъекты гражданских правоотношений Первая медицинская помощь при поражении аварийно-химически опасными веществами
Первая медицинская помощь при поражении аварийно-химически опасными веществами Счастливый английский после уроков презентация
Счастливый английский после уроков презентация Случаи сложения вида +7
Случаи сложения вида +7 Металлическая химическая связь
Металлическая химическая связь Четность и нечетность функции. (Алгебра 9 класс)
Четность и нечетность функции. (Алгебра 9 класс) Основы боевых действий и организация мотострелкового отделения. Огонь в бою. Система огня
Основы боевых действий и организация мотострелкового отделения. Огонь в бою. Система огня Шифры, пароли и Имаджинариум
Шифры, пароли и Имаджинариум Научный аппарат педагогического исследования
Научный аппарат педагогического исследования Поражение суставов при иммунодефицитных состоянии
Поражение суставов при иммунодефицитных состоянии Кредитні гроші та їх види
Кредитні гроші та їх види 8 марта (открытки)
8 марта (открытки) Сохранение, улучшение и популяризация Тракененской породы лошадей в России
Сохранение, улучшение и популяризация Тракененской породы лошадей в России