- Подводная лазерная локация

Содержание
- 2. Мутная среда: Туман; Пыль; Морская дымка; Подводная лазерная локация и телевидение. Основной вид помех – это
- 3. Стробированная лазерная телевизионная система (СЛТС): СЛТС, предназначенная для оснащения самоходного подводного аппарата (СПА) с целью обнаружения
- 4. По построению СЛТС должна быть стробированного типа, при котором реализуется принцип пространственной селекции объекта и отсекается
- 5. СЛТС предназначена для распознавания подводных объектов на дистанциях L ≥ (1,6 - 2,0)* Zб, где Zб
- 6. Источник света и оптическая приёмная система должны находиться в непосредственной близости друг от друга. Желательный вариант
- 7. Габариты объектов наблюдения: линейные: цилиндры диаметром от 0,45 м до 0,7 м, длиной от 1,1 м
- 8. Корабельная часть включает в себя блок включения и управления работой СЛТС, блок усиления и обработки видеосигнала
- 9. Функциональная схема СЛТС
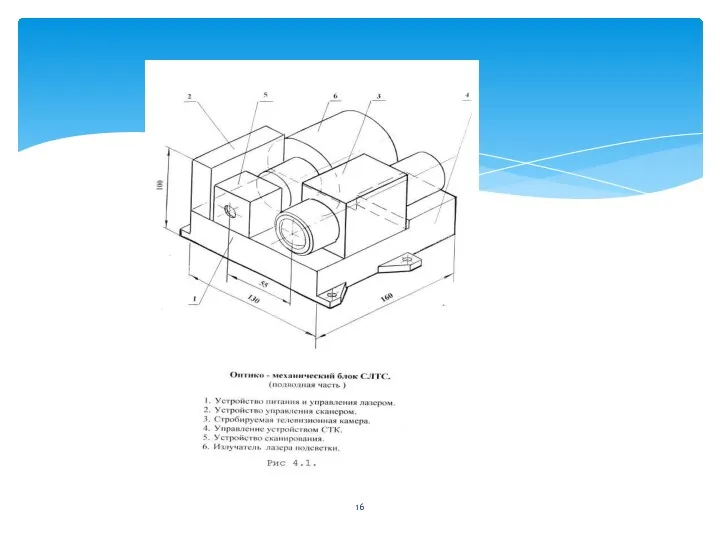
- 10. Подводная часть СЛТС состоит из приемной оптики, приемника на основе программируемой электронно-оптической стробируемой цифровая камера, устройства
- 11. В качестве источника подсветки в СЛТС применен импульсный твердотельный лазер с диодной накачкой. Лазер работает в
- 12. Для увеличения дальности видения и возможности выделения сигнала на фоне помехи обратного рассеяния (ПОР) в системе
- 13. Приемное устройство обеспечивает следующие технические характеристики: два режима работы : стробируемый дальность 2 Zб и стандартный
- 14. В качестве двигателя привода канала сканирования используется устройства, которые можно отнести к активным упругим компенсаторам из
- 18. Скачать презентацию
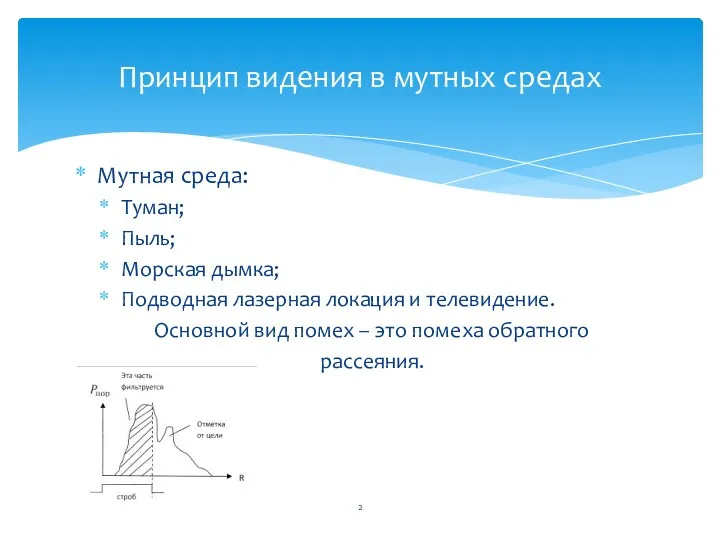
Мутная среда:
Туман;
Пыль;
Морская дымка;
Подводная лазерная локация и телевидение.
Основной вид помех – это
Мутная среда:
Туман;
Пыль;
Морская дымка;
Подводная лазерная локация и телевидение.
Основной вид помех – это
Стробированная лазерная телевизионная система (СЛТС):
СЛТС, предназначенная для оснащения самоходного подводного аппарата
Стробированная лазерная телевизионная система (СЛТС):
СЛТС, предназначенная для оснащения самоходного подводного аппарата
По построению СЛТС должна быть стробированного типа, при котором реализуется принцип
По построению СЛТС должна быть стробированного типа, при котором реализуется принцип
СЛТС предназначена для распознавания подводных объектов на дистанциях L ≥ (1,6
СЛТС предназначена для распознавания подводных объектов на дистанциях L ≥ (1,6
Источник света и оптическая приёмная система должны находиться в непосредственной близости
Источник света и оптическая приёмная система должны находиться в непосредственной близости
Габариты объектов наблюдения:
линейные: цилиндры диаметром от 0,45 м до 0,7 м,
длиной
Габариты объектов наблюдения:
линейные: цилиндры диаметром от 0,45 м до 0,7 м,
длиной
Корабельная часть включает в себя блок включения и управления работой СЛТС,
Корабельная часть включает в себя блок включения и управления работой СЛТС,

Функциональная схема СЛТС
Функциональная схема СЛТС
Подводная часть СЛТС состоит из приемной оптики, приемника на основе программируемой
Подводная часть СЛТС состоит из приемной оптики, приемника на основе программируемой
В качестве источника подсветки в СЛТС применен импульсный твердотельный лазер с
Для увеличения дальности видения и возможности выделения сигнала на фоне помехи
Для увеличения дальности видения и возможности выделения сигнала на фоне помехи
Приемное устройство обеспечивает следующие технические характеристики: два режима работы :
стробируемый дальность
Приемное устройство обеспечивает следующие технические характеристики: два режима работы :
стробируемый дальность
В качестве двигателя привода канала сканирования используется устройства, которые можно отнести
В качестве двигателя привода канала сканирования используется устройства, которые можно отнести
 Презентация Сказочное оригами
Презентация Сказочное оригами Османская империя накануне революции. Середина XIX в
Османская империя накануне революции. Середина XIX в Презентация кружка по ПДД
Презентация кружка по ПДД Систематика растений
Систематика растений Дизайн научного исследования при проведении медико-биологических исследований
Дизайн научного исследования при проведении медико-биологических исследований Aviation English
Aviation English Логопедический массаж. Диск
Логопедический массаж. Диск Допустимые уловы (ОДУ) водных биологических ресурсов на 2020 год в Удмуртском секторе Воткинского водохранилища
Допустимые уловы (ОДУ) водных биологических ресурсов на 2020 год в Удмуртском секторе Воткинского водохранилища ОМОН (Отряд мобильный особого назначения, ранее — Отряд милиции особого назначения)
ОМОН (Отряд мобильный особого назначения, ранее — Отряд милиции особого назначения) Электротехника в школе
Электротехника в школе Случаи вычитания 17-, 18-
Случаи вычитания 17-, 18- Анализ содержания программ лагерей с дневным пребыванием детей, актуальные вопросы подготовки программ на летний период
Анализ содержания программ лагерей с дневным пребыванием детей, актуальные вопросы подготовки программ на летний период Определение интерпретационных параметров ГИС по керну
Определение интерпретационных параметров ГИС по керну Наши пальчики играют
Наши пальчики играют The main directions of scientific activity of the Department of Forest Protection and Wood Science
The main directions of scientific activity of the Department of Forest Protection and Wood Science игра-презентация Убери в комнате.
игра-презентация Убери в комнате. Правовой статус редакции
Правовой статус редакции Обзор возможностей календаря Google
Обзор возможностей календаря Google Образцы моделей выполнения упражнений
Образцы моделей выполнения упражнений Өндірістік және әлеуметтік технология
Өндірістік және әлеуметтік технология Вадбольская Георгиевская (Егорьева) мужская пустынь
Вадбольская Георгиевская (Егорьева) мужская пустынь Резюме
Резюме Презентация Летопись нашего класса
Презентация Летопись нашего класса Новогодняя Снежинка-пушинка. Мастер-класс
Новогодняя Снежинка-пушинка. Мастер-класс Презентация: из истории Памятника Архитектуры и культуры Краснодарского края Свято-Троицкого храма ст. Платнировской. 1906 - 2011
Презентация: из истории Памятника Архитектуры и культуры Краснодарского края Свято-Троицкого храма ст. Платнировской. 1906 - 2011 Хозяйство Европейского Юга
Хозяйство Европейского Юга Технические каналы утечки информации на объектах информатизации Вооруженных Сил
Технические каналы утечки информации на объектах информатизации Вооруженных Сил Урок технологии в 3 классе Золотая рыбка
Урок технологии в 3 классе Золотая рыбка