- Понятие движения в геометрии

Содержание
- 2. Определение движения пространства Определение симметрии, виды симметрии. Осевая симметрия. Теорема. СОДЕРЖАНИЕ:
- 3. Движение (перемещение) плоскости - это отображение плоскости на себя, при котором сохраняются расстояния между точками. Симметрия
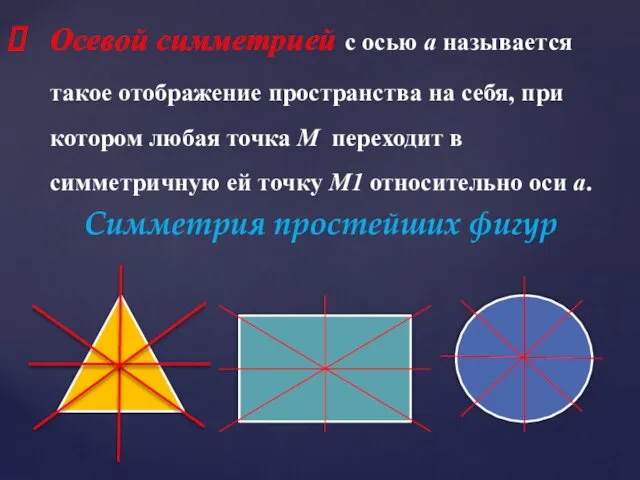
- 5. Симметрия простейших фигур Осевой симметрией с осью a называется такое отображение пространства на себя, при котором
- 6. Докажем , что осевая симметрия является движением. Для этого введём прямоугольную систему координат Oxyz.
- 7. Обозначим точку О – цент симметрии и введем прямоугольную систему координат Oxyz с началом в точке
- 8. Координаты середины отрезка в пространстве
- 9. 4) Из первого условия по формуле для координат середины отрезка получаем (x+x1)/2=0 и (y+y1)/2=0, откуда x1=-x;
- 10. Рассмотрим любые две точки A(x1; y1; z1) и B(x1; y2; z2) и докажем, что расстояние AB=А1В1
- 11. По формуле расстояния между двумя точками находим: тогда АВ=А1В1, что и требовалось доказать.
- 12. Доказательство: Пусть A и B — две произвольные точки фигуры F. При симметрии относительно точки O
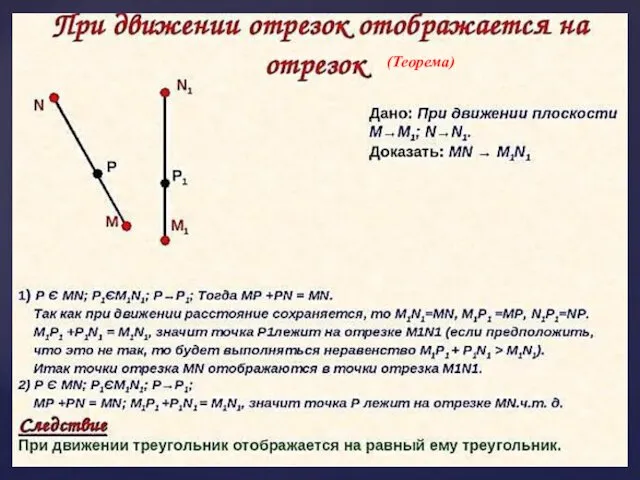
- 13. (Теорема)
- 15. Скачать презентацию
Определение движения пространства
Определение симметрии, виды симметрии.
Осевая симметрия.
Определение движения пространства
Определение симметрии, виды симметрии.
Осевая симметрия.
Движение (перемещение) плоскости - это отображение плоскости на себя, при котором сохраняются расстояния между
Движение (перемещение) плоскости - это отображение плоскости на себя, при котором сохраняются расстояния между

Симметрия простейших фигур
Осевой симметрией с осью a называется такое отображение
Симметрия простейших фигур
Осевой симметрией с осью a называется такое отображение
Докажем , что осевая симметрия является движением. Для этого введём прямоугольную
Докажем , что осевая симметрия является движением. Для этого введём прямоугольную
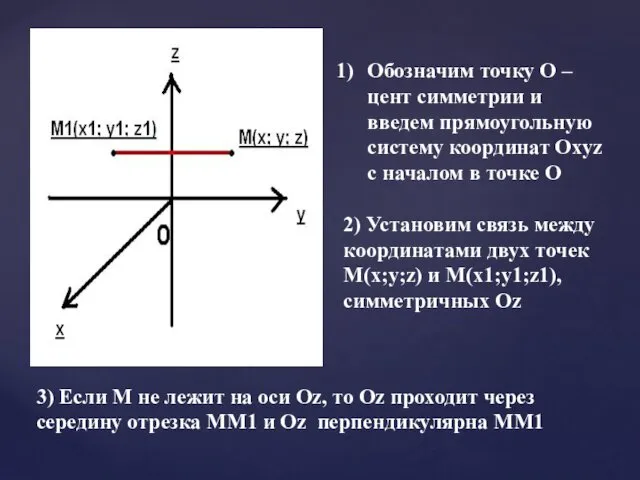
Обозначим точку О – цент симметрии и введем прямоугольную систему координат
Обозначим точку О – цент симметрии и введем прямоугольную систему координат
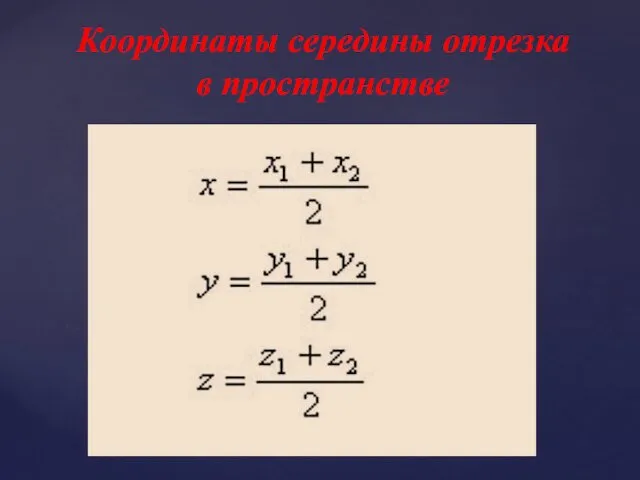
Координаты середины отрезка
в пространстве
Координаты середины отрезка
в пространстве
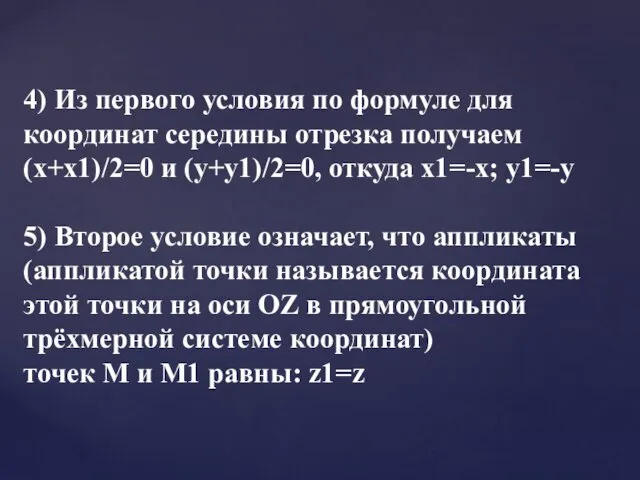
4) Из первого условия по формуле для координат середины отрезка получаем
4) Из первого условия по формуле для координат середины отрезка получаем
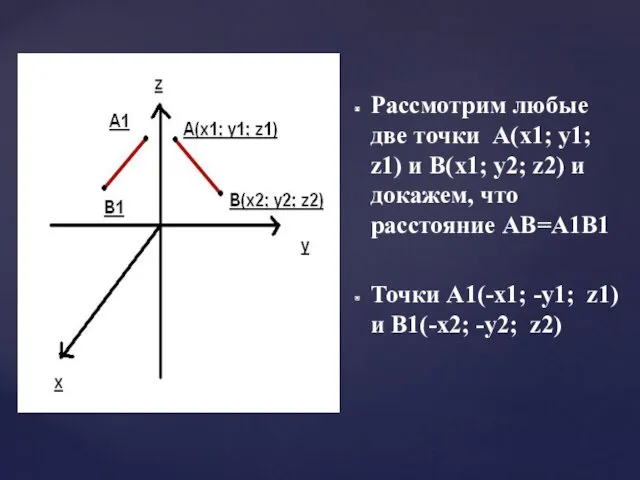
Рассмотрим любые две точки A(x1; y1; z1) и B(x1; y2; z2)
Рассмотрим любые две точки A(x1; y1; z1) и B(x1; y2; z2)
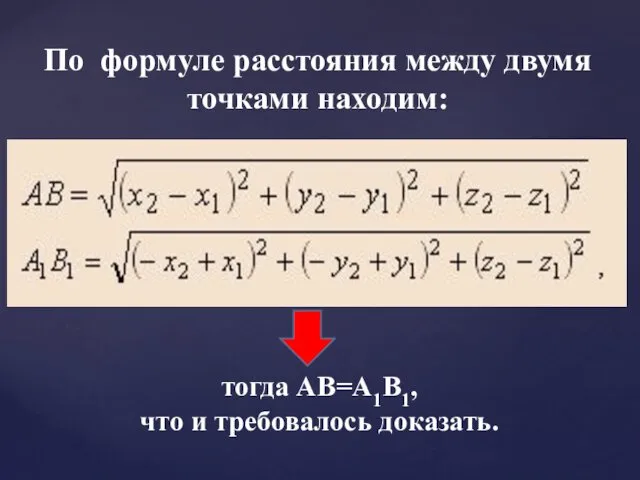
По формуле расстояния между двумя точками находим:
тогда АВ=А1В1,
что и
По формуле расстояния между двумя точками находим:
тогда АВ=А1В1,
что и
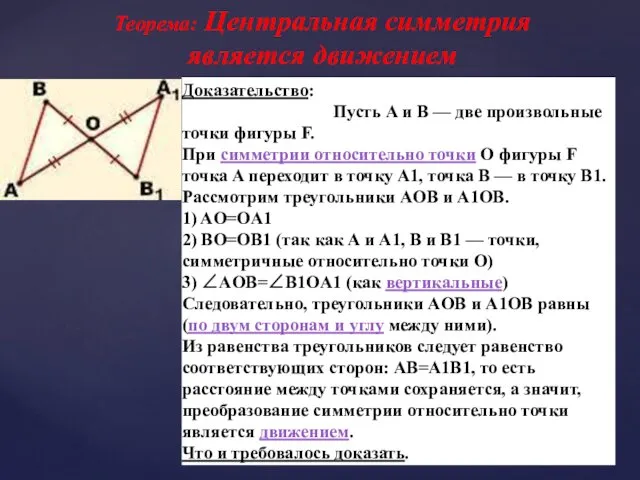
Доказательство:
Пусть A и B — две произвольные точки фигуры F.
При симметрии
Доказательство:
Пусть A и B — две произвольные точки фигуры F.
При симметрии
(Теорема)
(Теорема)
 Гражданская война в США (1861-1865). Империализм
Гражданская война в США (1861-1865). Империализм Николай Александрович Бердяев
Николай Александрович Бердяев Презентация № 3 Воздух, которым мы дышим
Презентация № 3 Воздух, которым мы дышим Діагностування пристроїв заземлення
Діагностування пристроїв заземлення Критерии оценивания курсовой и выпускной квалификационной работы
Критерии оценивания курсовой и выпускной квалификационной работы Деятельность руководителя по управлению деловой карьерой персонала
Деятельность руководителя по управлению деловой карьерой персонала Исследование и оценка физического развития. Функциональные пробы
Исследование и оценка физического развития. Функциональные пробы Государственная поддержка малого предпринимательства. ООО СтройЭкспертСтрелка
Государственная поддержка малого предпринимательства. ООО СтройЭкспертСтрелка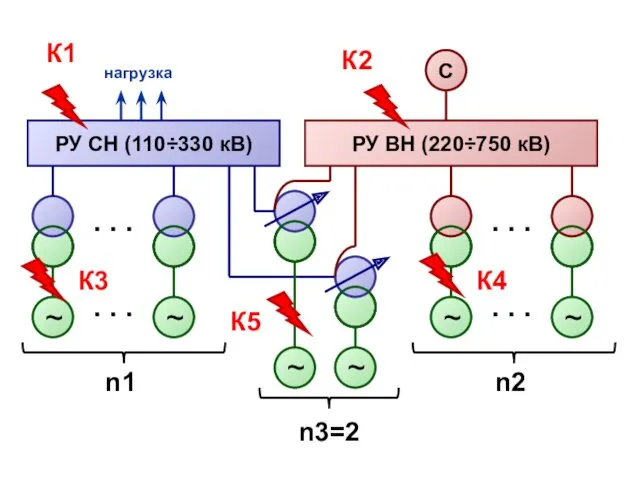 Расчёт ТКЗ схемы замещения
Расчёт ТКЗ схемы замещения Презентация 1
Презентация 1 Проект складной рыбацкий стулик
Проект складной рыбацкий стулик Сальмонеллалар, микробиологиялық диагностика, алдын-алу мен емдеу жолдары
Сальмонеллалар, микробиологиялық диагностика, алдын-алу мен емдеу жолдары Презентация Климат и климатические ресурсы
Презентация Климат и климатические ресурсы Эволюционная теория Дарвина
Эволюционная теория Дарвина Монастыри, основанные учениками преподобного Сергия Радонежского
Монастыри, основанные учениками преподобного Сергия Радонежского Государственный историко-архитектурный и этнографический музей-заповедник Кижи
Государственный историко-архитектурный и этнографический музей-заповедник Кижи Оборудование по теме Порошки
Оборудование по теме Порошки Совершенствование законодательства в области гражданской обороны и защиты населения и территорий от чрезвычайных ситуаций
Совершенствование законодательства в области гражданской обороны и защиты населения и территорий от чрезвычайных ситуаций Презентация к открытому мероприятию для учащихся 1 класса по правилам дорожного движения. Путешествие в страну дорожных знаков.
Презентация к открытому мероприятию для учащихся 1 класса по правилам дорожного движения. Путешествие в страну дорожных знаков. Комплектация и коммутация щитов
Комплектация и коммутация щитов Проектная работа
Проектная работа Наша Фаня
Наша Фаня Жизнь первых людей на Земле
Жизнь первых людей на Земле Биологическая роль отдельных микро-и ультрамикроэлементов в организме животных
Биологическая роль отдельных микро-и ультрамикроэлементов в организме животных Экономико-математическое моделирование
Экономико-математическое моделирование Основы проектирования машин. Редукторы со сборочным узлом
Основы проектирования машин. Редукторы со сборочным узлом Победа или поражение. Сочинение по пьесе А.Н.Островского Гроза
Победа или поражение. Сочинение по пьесе А.Н.Островского Гроза Страны исламского мира. Саудовская Аравия
Страны исламского мира. Саудовская Аравия