- Принцип формирования зон действия РМС

Содержание
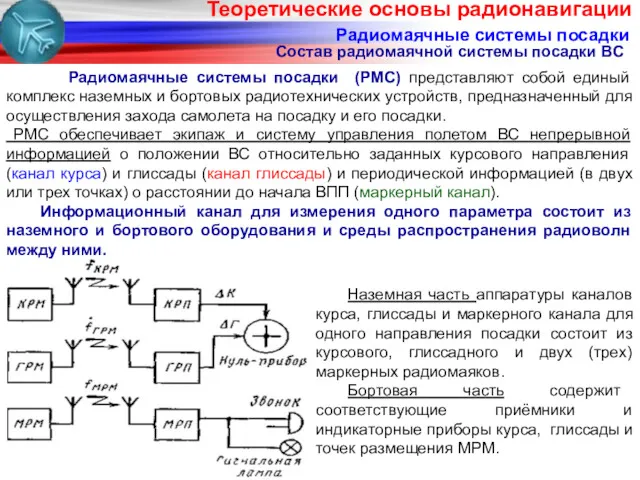
- 2. Радиомаячные системы посадки Радиомаячные системы посадки (РМС) представляют собой единый комплекс наземных и бортовых радиотехнических устройств,
- 3. Положение ВС относительно заданной траектории (ЗТ) снижения определяется угловыми отклонениями Δφ и Δθ в горизонтальной и
- 4. Радиомаячные системы посадки Для характеристики параметров зон излучения КРМ и ГРМ применяются следующие показатели: коэффициент глубины
- 5. Диаграммы направленности антенн и спектральный состав сигналов равносигнального ГРМ (а), спектры принимаемых сигналов (б), положение указателей
- 6. Антенная система курсового радиомаяка КРМ состоит из двух симметрично разнесенных относительно заданного направления антенн А1и А2
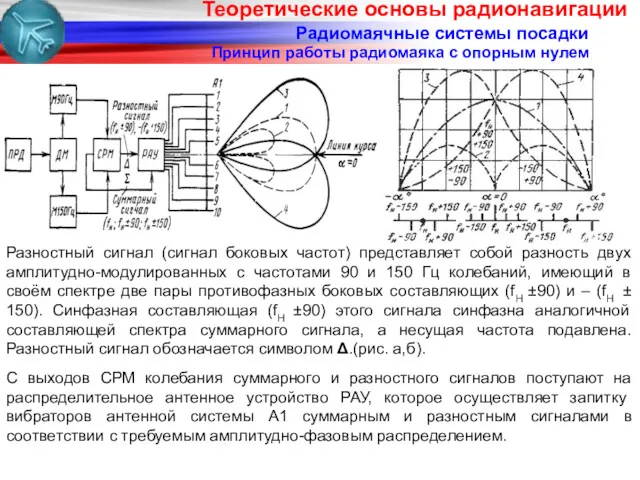
- 7. Радиомаячные системы посадки Принцип работы радиомаяка с опорным нулем Колебания передатчика распределяются делителем мощности ДМ между
- 8. Радиомаячные системы посадки Принцип работы радиомаяка с опорным нулем Разностный сигнал (сигнал боковых частот) представляет собой
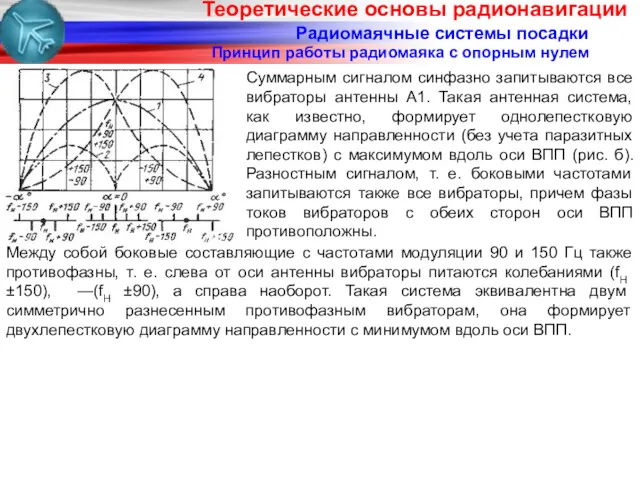
- 9. Радиомаячные системы посадки Принцип работы радиомаяка с опорным нулем Между собой боковые составляющие с частотами модуляции
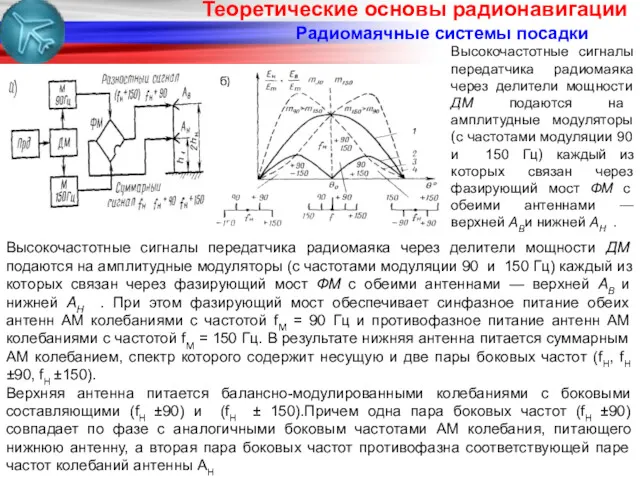
- 10. Радиомаячные системы посадки Высокочастотные сигналы передатчика радиомаяка через делители мощности ДМ подаются на амплитудные модуляторы (с
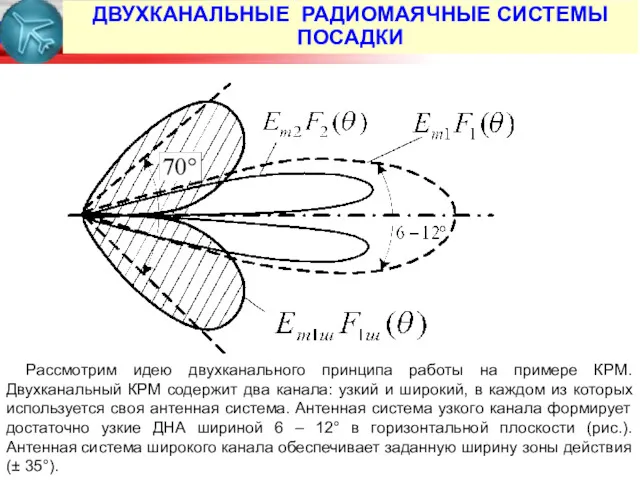
- 11. ДВУХКАНАЛЬНЫЕ РАДИОМАЯЧНЫЕ СИСТЕМЫ ПОСАДКИ Рассмотрим идею двухканального принципа работы на примере КРМ. Двухканальный КРМ содержит два
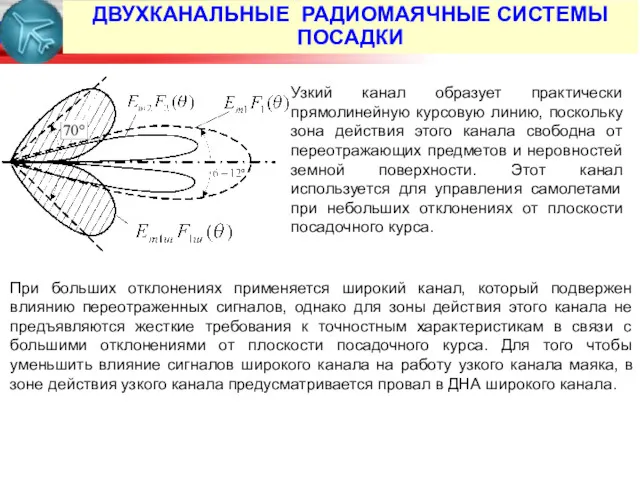
- 12. ДВУХКАНАЛЬНЫЕ РАДИОМАЯЧНЫЕ СИСТЕМЫ ПОСАДКИ При больших отклонениях применяется широкий канал, который подвержен влиянию переотраженных сигналов, однако
- 13. Оба канала маяка имеют одинаковый принцип работ, рассмотренный выше. На самолете сигналы узкого и широкого каналов
- 15. Скачать презентацию
Радиомаячные системы посадки
Радиомаячные системы посадки (РМС) представляют собой единый комплекс
Радиомаячные системы посадки
Радиомаячные системы посадки (РМС) представляют собой единый комплекс
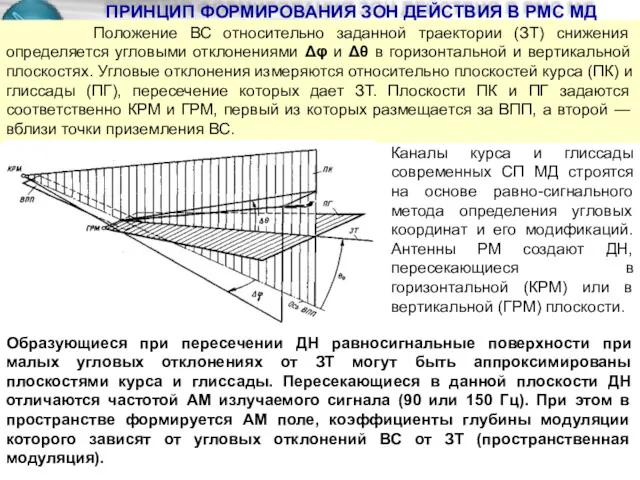
Положение ВС относительно заданной траектории (ЗТ) снижения определяется угловыми отклонениями
Положение ВС относительно заданной траектории (ЗТ) снижения определяется угловыми отклонениями
Радиомаячные системы посадки
Для характеристики параметров зон излучения КРМ и ГРМ
Радиомаячные системы посадки
Для характеристики параметров зон излучения КРМ и ГРМ
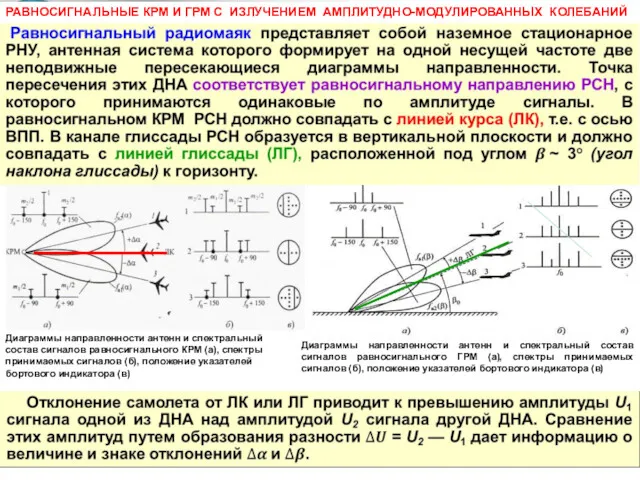
Диаграммы направленности антенн и спектральный состав сигналов равносигнального ГРМ (а), спектры
Диаграммы направленности антенн и спектральный состав сигналов равносигнального ГРМ (а), спектры
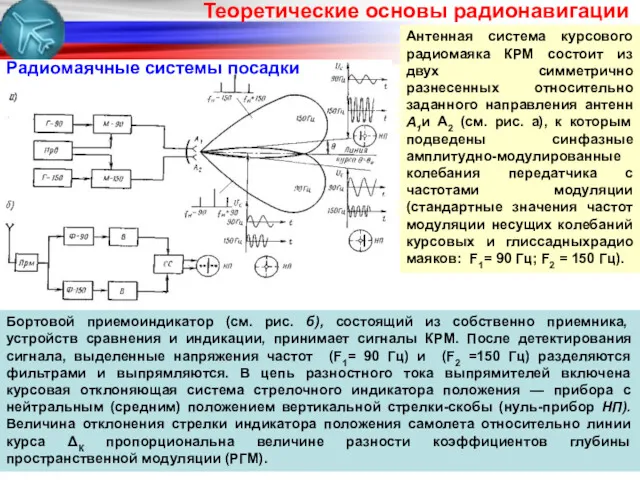
Антенная система курсового радиомаяка КРМ состоит из двух симметрично разнесенных относительно
Антенная система курсового радиомаяка КРМ состоит из двух симметрично разнесенных относительно

Радиомаячные системы посадки
Принцип работы радиомаяка с опорным нулем
Колебания передатчика распределяются
Радиомаячные системы посадки
Принцип работы радиомаяка с опорным нулем
Колебания передатчика распределяются
Радиомаячные системы посадки
Принцип работы радиомаяка с опорным нулем
Разностный сигнал (сигнал
Радиомаячные системы посадки
Принцип работы радиомаяка с опорным нулем
Разностный сигнал (сигнал
Радиомаячные системы посадки
Принцип работы радиомаяка с опорным нулем
Между собой боковые
Радиомаячные системы посадки
Принцип работы радиомаяка с опорным нулем
Между собой боковые
Радиомаячные системы посадки
Высокочастотные сигналы передатчика радиомаяка через делители мощности ДМ подаются
Радиомаячные системы посадки
Высокочастотные сигналы передатчика радиомаяка через делители мощности ДМ подаются
ДВУХКАНАЛЬНЫЕ РАДИОМАЯЧНЫЕ СИСТЕМЫ ПОСАДКИ
Рассмотрим идею двухканального принципа работы на примере КРМ.
ДВУХКАНАЛЬНЫЕ РАДИОМАЯЧНЫЕ СИСТЕМЫ ПОСАДКИ
Рассмотрим идею двухканального принципа работы на примере КРМ.
ДВУХКАНАЛЬНЫЕ РАДИОМАЯЧНЫЕ СИСТЕМЫ ПОСАДКИ
При больших отклонениях применяется широкий канал, который подвержен
ДВУХКАНАЛЬНЫЕ РАДИОМАЯЧНЫЕ СИСТЕМЫ ПОСАДКИ
При больших отклонениях применяется широкий канал, который подвержен
Оба канала маяка имеют одинаковый принцип работ, рассмотренный выше. На самолете
Оба канала маяка имеют одинаковый принцип работ, рассмотренный выше. На самолете
 Буквенная запись свойств сложения и вычитания(математика 5 класс ,Виленкин)
Буквенная запись свойств сложения и вычитания(математика 5 класс ,Виленкин) Презентация к занятию по внеурочной деятельности Полдник. Пора есть булочки
Презентация к занятию по внеурочной деятельности Полдник. Пора есть булочки Автоматизация звука С в слогах
Автоматизация звука С в слогах Образование причастий
Образование причастий Железобетонный каркас промышленных одноэтажных зданий
Железобетонный каркас промышленных одноэтажных зданий Рождественский сочельник
Рождественский сочельник Коллективный проект, технология, 3 класс, Подарок ветерану
Коллективный проект, технология, 3 класс, Подарок ветерану Нация и этнос: становление и развитие теоретических положений в мировой и российской этнологии
Нация и этнос: становление и развитие теоретических положений в мировой и российской этнологии Особенности образовательного процесса в 5 классе в 2020-2021 учебном году
Особенности образовательного процесса в 5 классе в 2020-2021 учебном году Конспект занятия Хорошо и там и тут, где по имени зовут
Конспект занятия Хорошо и там и тут, где по имени зовут White and red? if you mix blue and red …
White and red? if you mix blue and red … Кружок Наши ладошки умеют всё понемножку
Кружок Наши ладошки умеют всё понемножку Викторина по русским народным сказкам
Викторина по русским народным сказкам Презентация к уроку по теме Природные ресурсы Западной Сибири (8 класс)
Презентация к уроку по теме Природные ресурсы Западной Сибири (8 класс) Дидактическая игра Четвёртый лишний. Птицы
Дидактическая игра Четвёртый лишний. Птицы Бразилия
Бразилия Презентация Программа развития УУД
Презентация Программа развития УУД Финансовый анализ предприятия и его использование в практике управления финансовыми рисками
Финансовый анализ предприятия и его использование в практике управления финансовыми рисками Конструкт урока Ъ и Ь
Конструкт урока Ъ и Ь Организация городского пассажирского транспорта (Тема 8)
Организация городского пассажирского транспорта (Тема 8) Правила варки заправочных супов
Правила варки заправочных супов Тесты по истории и культуре Санкт-Петербурга. 7 класс
Тесты по истории и культуре Санкт-Петербурга. 7 класс Древнейший период развития края. Старая Ладога
Древнейший период развития края. Старая Ладога Системы связи и оповещения в РСЧС. Групповое занятие №1.3. Телекоммуникационные сети
Системы связи и оповещения в РСЧС. Групповое занятие №1.3. Телекоммуникационные сети Устройство электровоза 2ЭВ120
Устройство электровоза 2ЭВ120 Самооценка у мальчиков и девочек старшего дошкольного возраста
Самооценка у мальчиков и девочек старшего дошкольного возраста Ознакомление с наземными радиотехническими средствами учебной базы РТОС. Отчет по лабораторной работе № 2
Ознакомление с наземными радиотехническими средствами учебной базы РТОС. Отчет по лабораторной работе № 2 Презентация к уроку 8 кл - Рельеф России
Презентация к уроку 8 кл - Рельеф России