- Проектирование теодолитного хода на основе цифровой карты и уравнивание измерений

Содержание
- 2. Проектирование топографо-геодезических работ Цель и задача Создание планово высотного обоснования для производства топографической съемки масштаба 1:500.
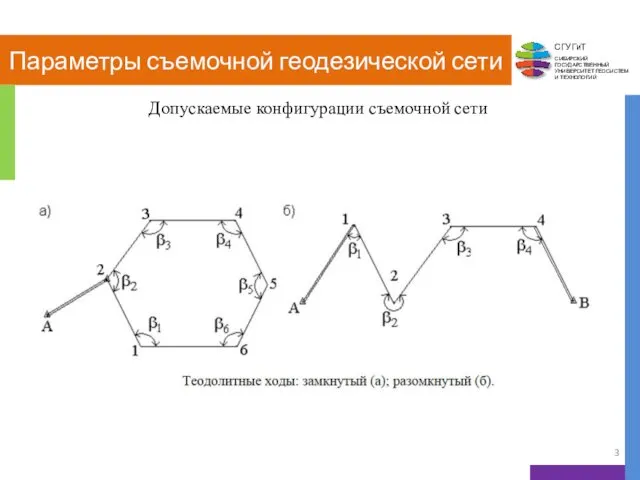
- 3. Параметры съемочной геодезической сети Допускаемые конфигурации съемочной сети
- 4. Параметры съемочной геодезической сети Съемочная геодезическая сеть должна охватывать территорию проведения топографической съемки. Общая длина теодолитного
- 5. Проектирование съемочной геодезической сети Установить программное обеспечение Google Планета Земля «Google Earth». Выполнить настройку «Google Earth».
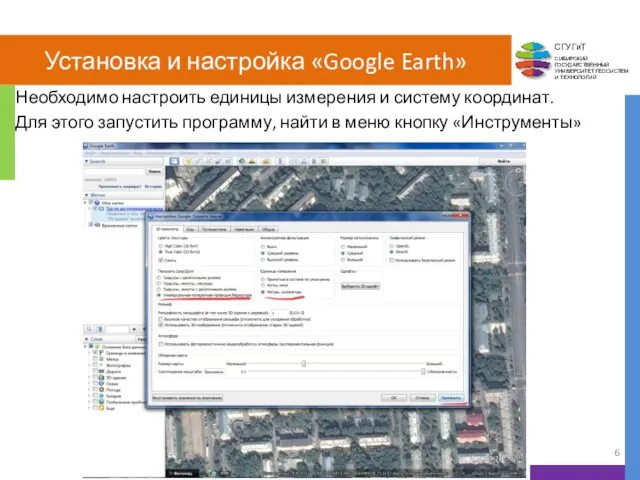
- 6. Установка и настройка «Google Earth» Необходимо настроить единицы измерения и систему координат. Для этого запустить программу,
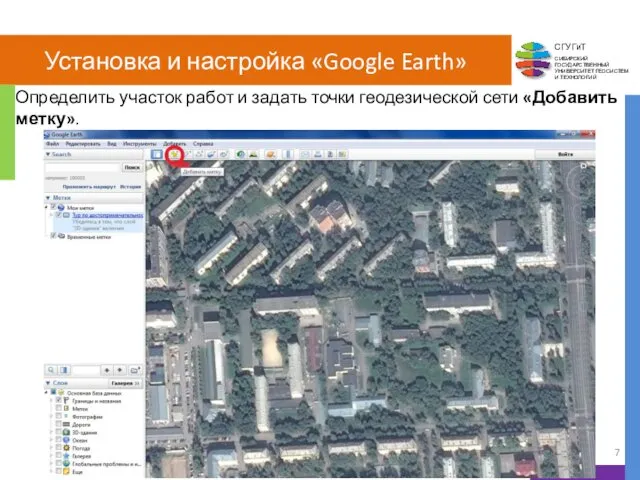
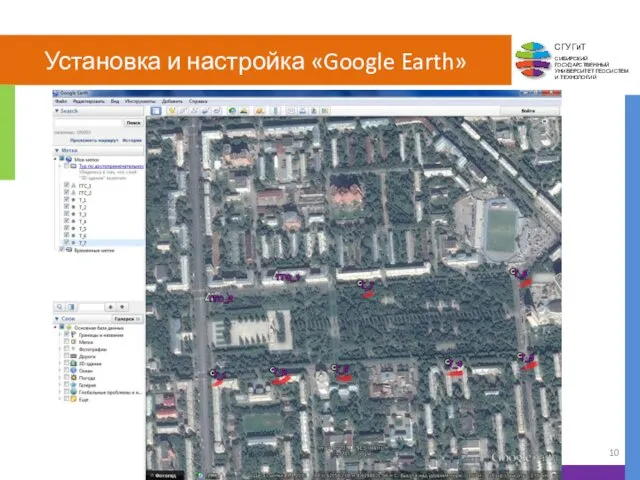
- 7. Установка и настройка «Google Earth» Определить участок работ и задать точки геодезической сети «Добавить метку».
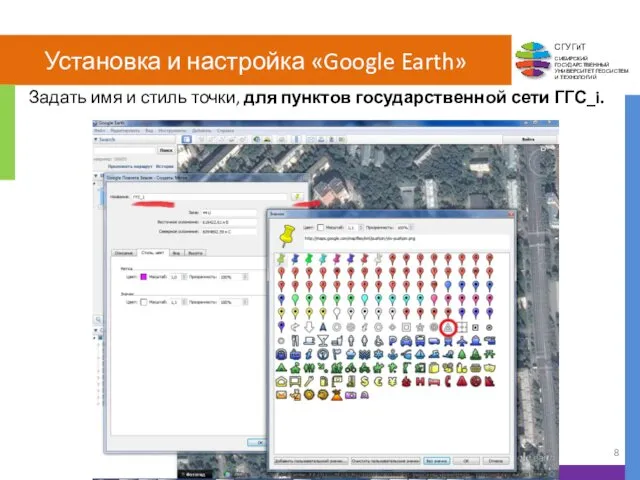
- 8. Установка и настройка «Google Earth» Задать имя и стиль точки, для пунктов государственной сети ГГС_i.
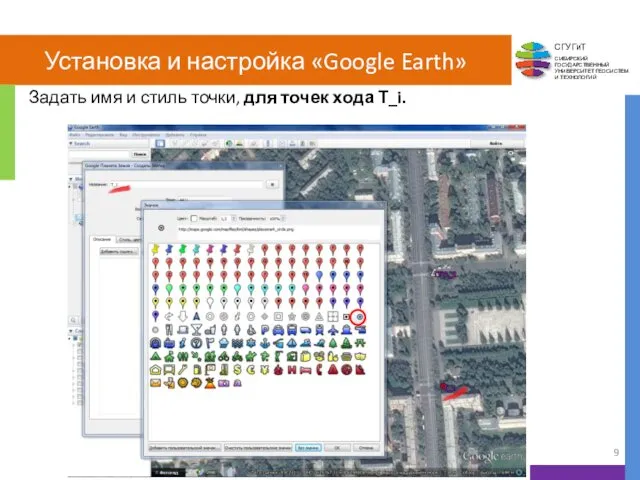
- 9. Установка и настройка «Google Earth» Задать имя и стиль точки, для точек хода Т_i.
- 10. Установка и настройка «Google Earth»
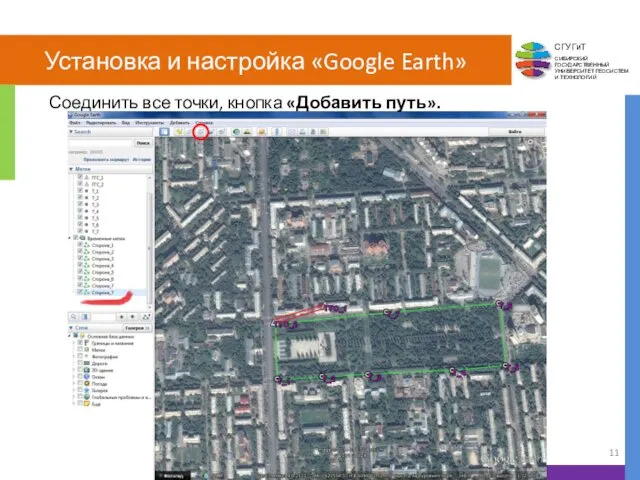
- 11. Установка и настройка «Google Earth» Соединить все точки, кнопка «Добавить путь».
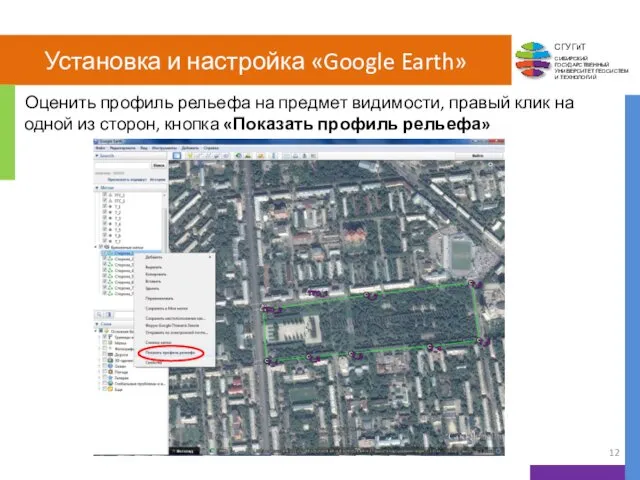
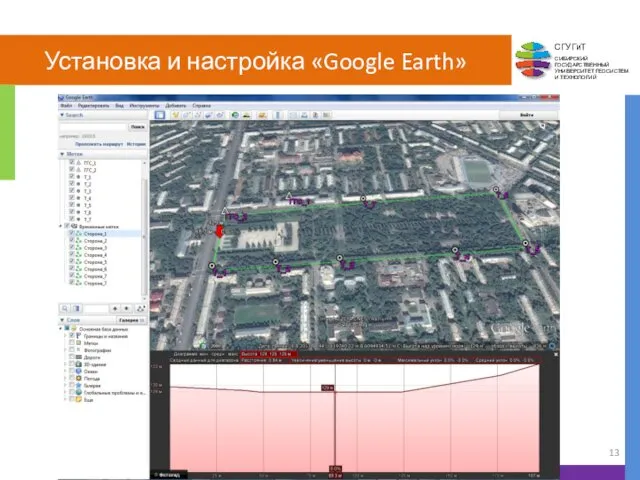
- 12. Установка и настройка «Google Earth» Оценить профиль рельефа на предмет видимости, правый клик на одной из
- 13. Установка и настройка «Google Earth»
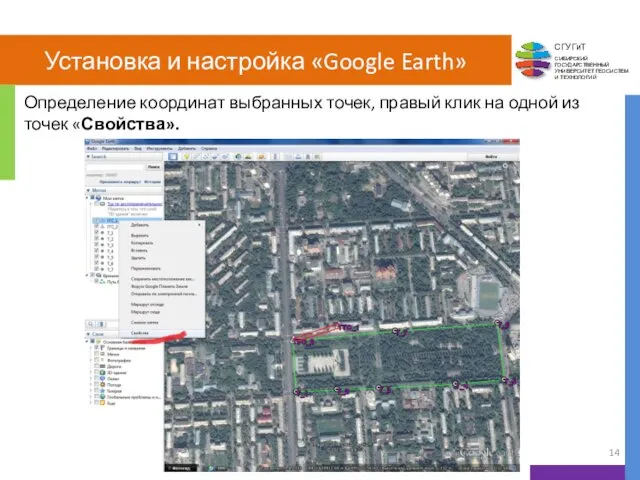
- 14. Установка и настройка «Google Earth» Определение координат выбранных точек, правый клик на одной из точек «Свойства».
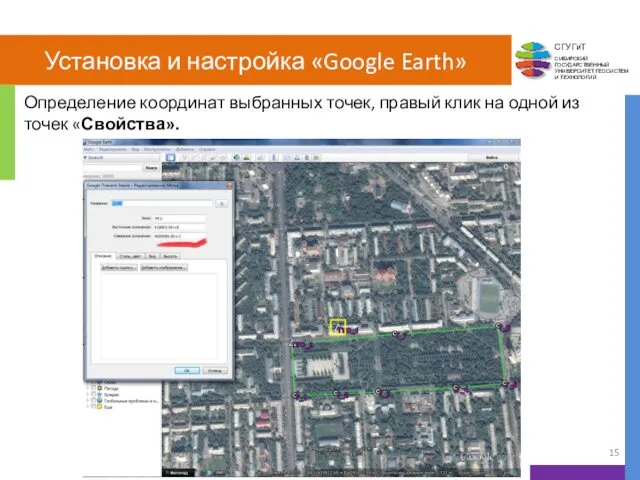
- 15. Установка и настройка «Google Earth» Определение координат выбранных точек, правый клик на одной из точек «Свойства».
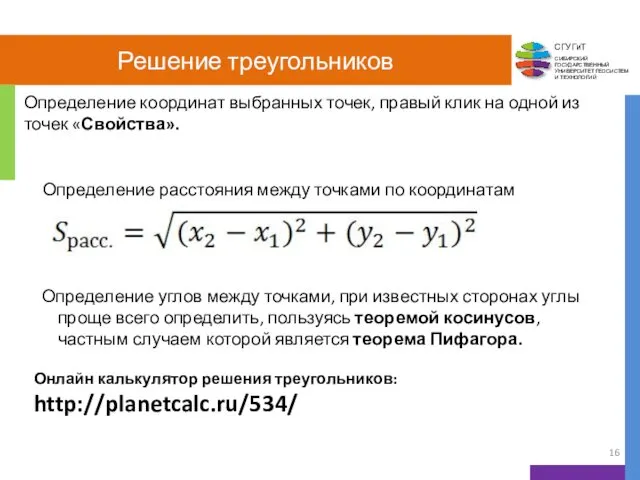
- 16. Решение треугольников Определение координат выбранных точек, правый клик на одной из точек «Свойства». Определение расстояния между
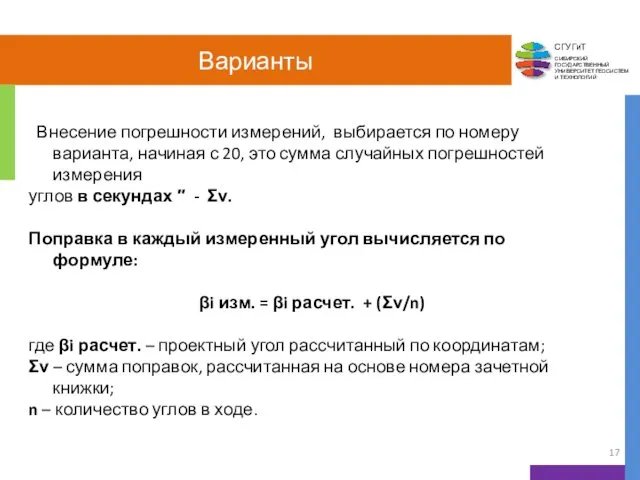
- 17. Варианты Внесение погрешности измерений, выбирается по номеру варианта, начиная с 20, это сумма случайных погрешностей измерения
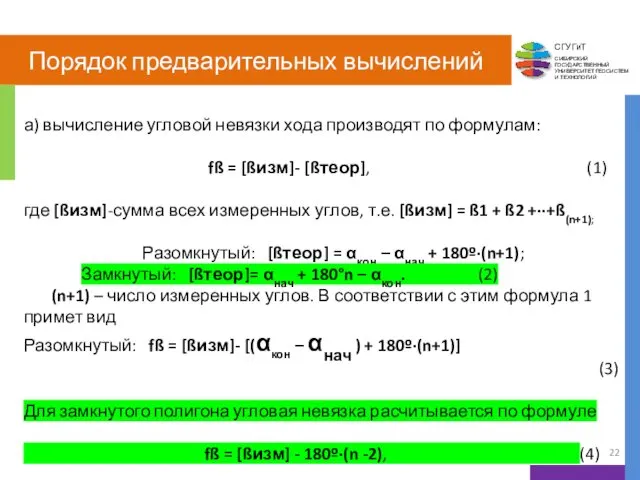
- 18. Уравнивание Камеральная обработка разомкнутого теодолитного хода проводится в той же последовательности, что и для замкнутого теодолитного
- 19. Уравнивание Обозначим дирекционные углы исходных сторон СА и BD соответственно αнач и αкон , тогда согласно
- 20. Уравнивание Складывая по столбцу данные равенства, будем иметь: αкон = αнач + 180°n – Σβ. Тогда
- 21. Предварительное уравнивание полигонометрического хода В данном полигонометрическом ходе измерены левые по ходу углы: ß1,ß2···ßn+1 и стороны
- 22. Порядок предварительных вычислений а) вычисление угловой невязки хода производят по формулам: fß = [ßизм]- [ßтеор], (1)
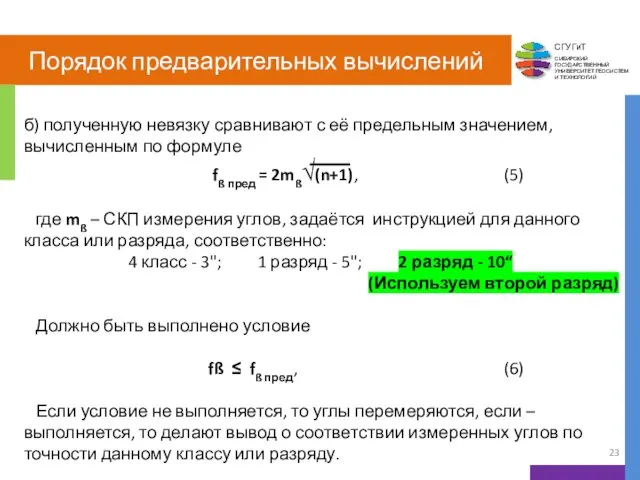
- 23. Порядок предварительных вычислений б) полученную невязку сравнивают с её предельным значением, вычисленным по формуле fß пред
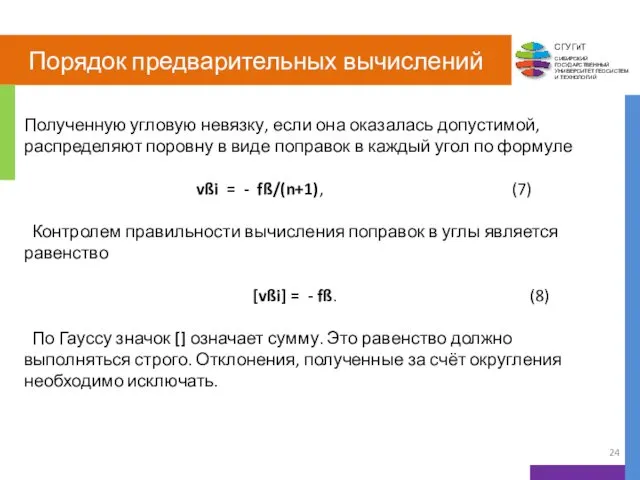
- 24. Порядок предварительных вычислений Полученную угловую невязку, если она оказалась допустимой, распределяют поровну в виде поправок в
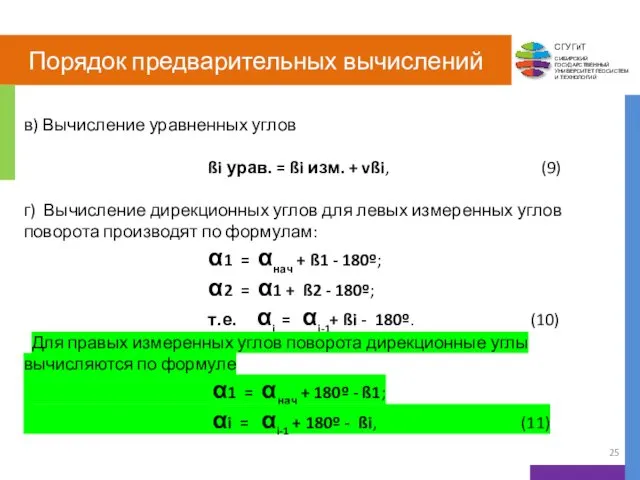
- 25. Порядок предварительных вычислений в) Вычисление уравненных углов ßi урав. = ßi изм. + vßi, (9) г)
- 26. Порядок предварительных вычислений д) Далее определяют приращения координат по формулам: ∆Xi = Si · Cos αi;
- 27. Порядок предварительных вычислений В результате формулы 13 примут вид: fx = [∆x] - (Х кон –
- 28. Порядок предварительных вычислений Относительная невязка является критерием точности линейных измерений. Её величину представляют в виде дроби,
- 29. Порядок предварительных вычислений к) Для получения приближённых значений координат пунктов, вычисляют поправки в приращения координат по
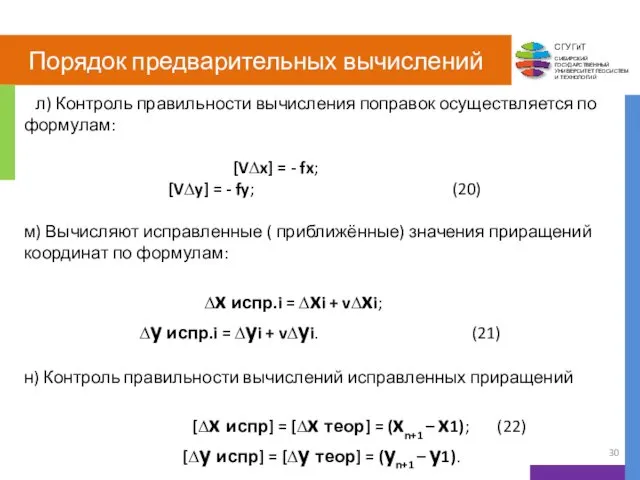
- 30. Порядок предварительных вычислений л) Контроль правильности вычисления поправок осуществляется по формулам: [V∆x] = - fx; [V∆y]
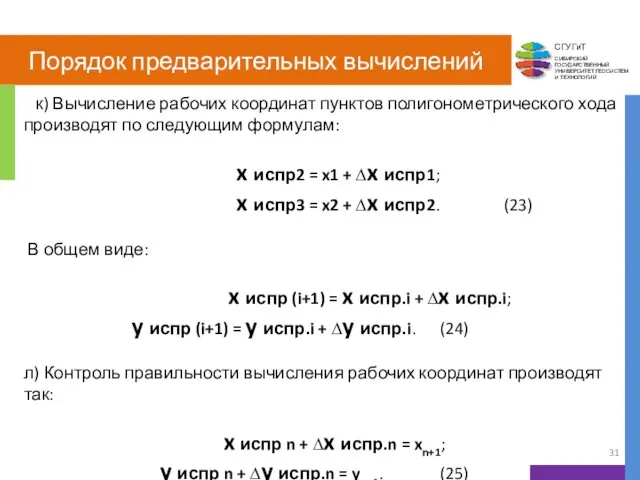
- 31. Порядок предварительных вычислений к) Вычисление рабочих координат пунктов полигонометрического хода производят по следующим формулам: x испр2
- 33. Скачать презентацию
Проектирование топографо-геодезических работ
Цель и задача
Создание планово высотного обоснования для производства
Проектирование топографо-геодезических работ
Цель и задача
Создание планово высотного обоснования для производства
Параметры съемочной геодезической сети
Допускаемые конфигурации съемочной сети
Параметры съемочной геодезической сети
Допускаемые конфигурации съемочной сети
Параметры съемочной геодезической сети
Съемочная геодезическая сеть должна охватывать территорию проведения топографической
Параметры съемочной геодезической сети
Съемочная геодезическая сеть должна охватывать территорию проведения топографической
Проектирование съемочной геодезической сети
Установить программное обеспечение Google Планета Земля «Google
Проектирование съемочной геодезической сети
Установить программное обеспечение Google Планета Земля «Google
Установка и настройка «Google Earth»
Необходимо настроить единицы измерения и систему координат.
Для
Установка и настройка «Google Earth»
Необходимо настроить единицы измерения и систему координат.
Для
Установка и настройка «Google Earth»
Определить участок работ и задать точки геодезической
Установка и настройка «Google Earth»
Определить участок работ и задать точки геодезической
Установка и настройка «Google Earth»
Задать имя и стиль точки, для пунктов
Установка и настройка «Google Earth»
Задать имя и стиль точки, для пунктов
Установка и настройка «Google Earth»
Задать имя и стиль точки, для точек
Установка и настройка «Google Earth»
Задать имя и стиль точки, для точек
Установка и настройка «Google Earth»
Установка и настройка «Google Earth»
Установка и настройка «Google Earth»
Соединить все точки, кнопка «Добавить путь».
Установка и настройка «Google Earth»
Соединить все точки, кнопка «Добавить путь».
Установка и настройка «Google Earth»
Оценить профиль рельефа на предмет видимости, правый
Установка и настройка «Google Earth»
Оценить профиль рельефа на предмет видимости, правый
Установка и настройка «Google Earth»
Установка и настройка «Google Earth»
Установка и настройка «Google Earth»
Определение координат выбранных точек, правый клик на
Установка и настройка «Google Earth»
Определение координат выбранных точек, правый клик на
Установка и настройка «Google Earth»
Определение координат выбранных точек, правый клик на
Установка и настройка «Google Earth»
Определение координат выбранных точек, правый клик на
Решение треугольников
Определение координат выбранных точек, правый клик на одной из точек
Решение треугольников
Определение координат выбранных точек, правый клик на одной из точек
Варианты
Внесение погрешности измерений, выбирается по номеру варианта, начиная с 20,
Варианты
Внесение погрешности измерений, выбирается по номеру варианта, начиная с 20,
Уравнивание
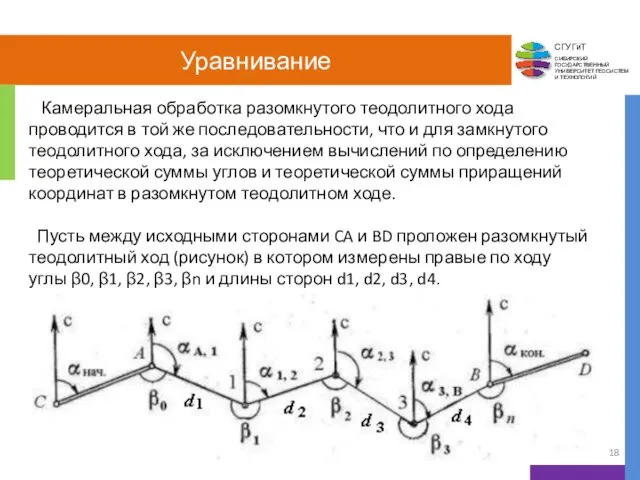
Камеральная обработка разомкнутого теодолитного хода проводится в той же последовательности,
Уравнивание
Камеральная обработка разомкнутого теодолитного хода проводится в той же последовательности,
Уравнивание
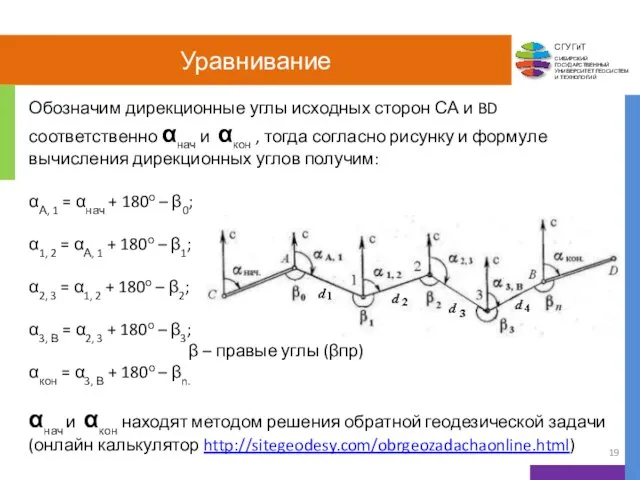
Обозначим дирекционные углы исходных сторон СА и BD
соответственно αнач и
Уравнивание
Обозначим дирекционные углы исходных сторон СА и BD
соответственно αнач и
Уравнивание
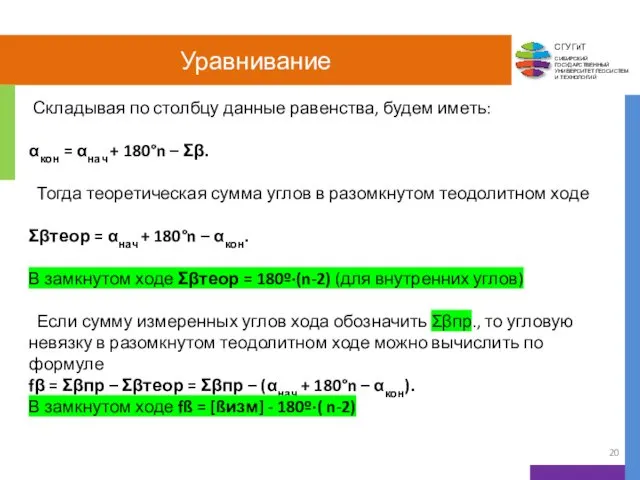
Складывая по столбцу данные равенства, будем иметь:
αкон = αнач +
Уравнивание
Складывая по столбцу данные равенства, будем иметь:
αкон = αнач +
Предварительное уравнивание полигонометрического хода
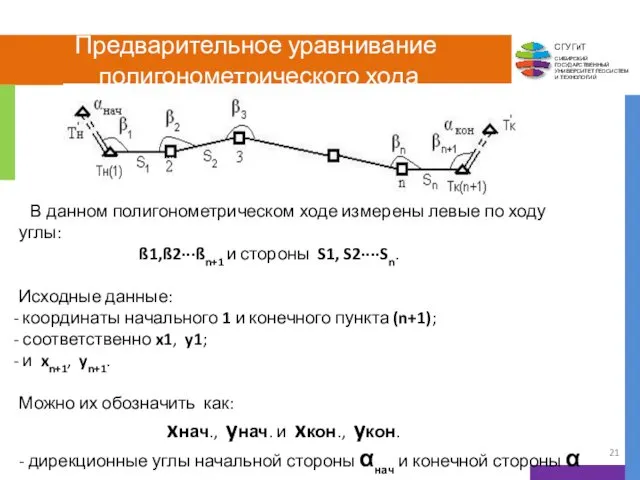
В данном полигонометрическом ходе измерены левые по
Предварительное уравнивание полигонометрического хода
В данном полигонометрическом ходе измерены левые по
Порядок предварительных вычислений
а) вычисление угловой невязки хода производят по формулам:
fß
Порядок предварительных вычислений
а) вычисление угловой невязки хода производят по формулам:
fß
Порядок предварительных вычислений
б) полученную невязку сравнивают с её предельным значением,
Порядок предварительных вычислений
б) полученную невязку сравнивают с её предельным значением,
Порядок предварительных вычислений
Полученную угловую невязку, если она оказалась допустимой, распределяют
Порядок предварительных вычислений
Полученную угловую невязку, если она оказалась допустимой, распределяют
Порядок предварительных вычислений
в) Вычисление уравненных углов
ßi урав. = ßi изм.
Порядок предварительных вычислений
в) Вычисление уравненных углов
ßi урав. = ßi изм.
Порядок предварительных вычислений
д) Далее определяют приращения координат по формулам:
∆Xi
Порядок предварительных вычислений
д) Далее определяют приращения координат по формулам:
∆Xi
Порядок предварительных вычислений
В результате формулы 13 примут вид:
fx = [∆x]
Порядок предварительных вычислений
В результате формулы 13 примут вид:
fx = [∆x]
Порядок предварительных вычислений
Относительная невязка является критерием точности линейных измерений.
Её
Порядок предварительных вычислений
Относительная невязка является критерием точности линейных измерений.
Её
Порядок предварительных вычислений
к) Для получения приближённых значений координат пунктов, вычисляют
Порядок предварительных вычислений
к) Для получения приближённых значений координат пунктов, вычисляют
Порядок предварительных вычислений
л) Контроль правильности вычисления поправок осуществляется по формулам:
[V∆x]
Порядок предварительных вычислений
л) Контроль правильности вычисления поправок осуществляется по формулам:
[V∆x]
Порядок предварительных вычислений
к) Вычисление рабочих координат пунктов полигонометрического хода производят
Порядок предварительных вычислений
к) Вычисление рабочих координат пунктов полигонометрического хода производят
 Анализ эмитента на примере ПАО ЛУКОЙЛ
Анализ эмитента на примере ПАО ЛУКОЙЛ Обществознание, как наука о человеке и существовании в обществе
Обществознание, как наука о человеке и существовании в обществе Оксиды, классификация, свойства оксидов. 8 класс
Оксиды, классификация, свойства оксидов. 8 класс Пневматическая схема электровоза ВЛ80с
Пневматическая схема электровоза ВЛ80с 57 стилей для ударной установки с аккомпаниментом бас-гитары
57 стилей для ударной установки с аккомпаниментом бас-гитары Почему не падает мотоциклист в цирковом шаре
Почему не падает мотоциклист в цирковом шаре Опухоли легких у детей
Опухоли легких у детей Презентация по немецкому языку _Числительные 1-1000_ (5 класс)
Презентация по немецкому языку _Числительные 1-1000_ (5 класс) Быть женщиной
Быть женщиной Регулирование насосов в машине. Изменение частоты вращения регулируемым электроприводом. Преобразователи частоты
Регулирование насосов в машине. Изменение частоты вращения регулируемым электроприводом. Преобразователи частоты Презентация Геометрические фигуры (круг)
Презентация Геометрические фигуры (круг) Классификация и типы паровых котлов
Классификация и типы паровых котлов Сценарий игры-викторины В гости к дедушке Корнею для младших дошкольников
Сценарий игры-викторины В гости к дедушке Корнею для младших дошкольников Типизация и структуризация данных
Типизация и структуризация данных Нейроинфекции. Антибактериалды препараттың қолданылуы және әсер ету механизмі (ГЕБ)
Нейроинфекции. Антибактериалды препараттың қолданылуы және әсер ету механизмі (ГЕБ) Хранение информации
Хранение информации Жилищные права и обязанности граждан
Жилищные права и обязанности граждан Методологические основы и методы современной психологии
Методологические основы и методы современной психологии Игры и игровые упражнения в логопедической работе с детьми. Развитие мелкой моторики рук
Игры и игровые упражнения в логопедической работе с детьми. Развитие мелкой моторики рук Книги войны и Победы Издания 1941-1945 гг. в фонде сектора редкой книги
Книги войны и Победы Издания 1941-1945 гг. в фонде сектора редкой книги Компании Citel
Компании Citel Мороженая рыба
Мороженая рыба Классный час по теме СНГ (союз независимых государств)
Классный час по теме СНГ (союз независимых государств) Осторожно - огонь!
Осторожно - огонь! Презентация Информационные технологии в дополнительном образовании детей
Презентация Информационные технологии в дополнительном образовании детей Мөселманнар тормышының биш баганасы
Мөселманнар тормышының биш баганасы Презентация по лексической теме Профессии
Презентация по лексической теме Профессии Field cropping
Field cropping