- Пункты наземного управления. Требования и задачи

Содержание
- 2. Пункты наземного управления (НПУ) Цент управления БПВС, который предоставляет возможности для управления беспилотными летательными аппаратами человеком.
- 3. Требования и задачи Обеспечение устойчивой связи с БПВС по различным каналам (спутниковая связь, радио-диапазон, wi-fi, LTE,
- 4. Состав НПУ Наземная станция управления включает в себя: Системы связи и линии передачи данных, необходимые для
- 5. Виды НПУ Пункты наземного управления. Программный модуль Аппаратный модуль Мобильное приложение Персональный компьютер Ручной пульт Стационарный
- 6. Программный пункт управления Мобильное приложение Достоинства: Устанавливается на устройства, доступные большому количеству людей; Кроссплатформенность; Интеграция с
- 7. Программный пункт управления Мобильное приложение MAV Pilot 1.4
- 8. Программный пункт управления Персональный компьютер Достоинства: Устанавливается на устройства, доступные большому количеству людей Кроссплатформенность Широкий функционал
- 9. Программный пункт управления Персональный компьютер
- 10. Аппаратный пункт управления Ручной пульт Простейший пульт управления помещающийся в руках, с минимальным функционалом: Контроль БПВС
- 14. Передвигающиеся НПУ Плюсы: Полная автономность работы Быстрая смена позиции Оперативная развертка Работа НПУ во время движения
- 21. Стационарный пункт управления Центр управления полетами
- 22. Переносной НПУ Наиболее распространенные вид НПУ. Как правило состоит из: Основа - персональный ПК, ноутбук. Возможно
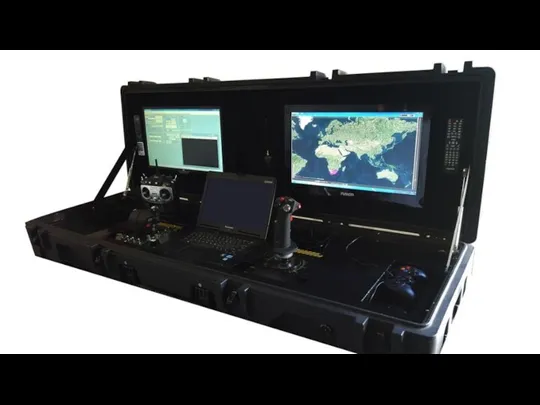
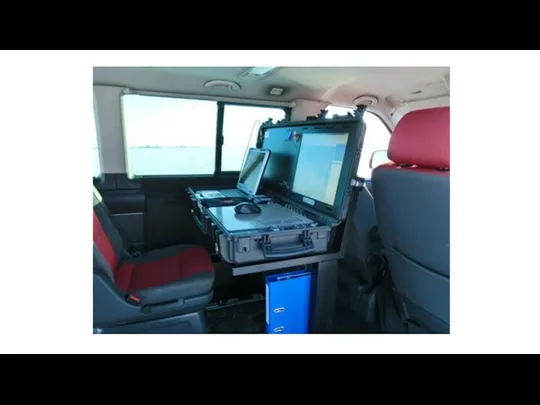
- 23. Неразборный переносной НПУ Полностью собранный комплекс наземного управления БПВС, готовый к использованию оператором в течении минуты
- 27. Модульный переносной НПУ Такой НПУ состоит из отдельных модулей, собирающийся перед полетом и разбирающийся для транспортировки.
- 29. Периферийные устройства НПУ Радиомодем с мачтой Барометр
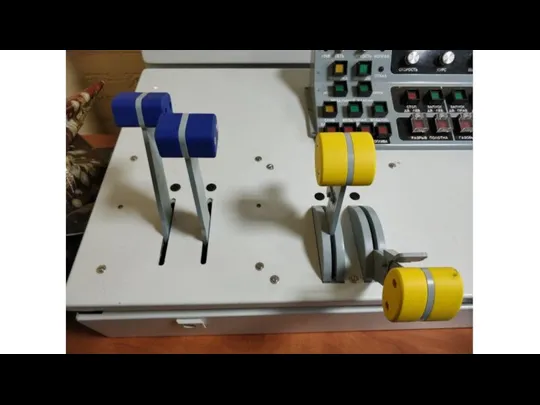
- 30. Периферийные устройства НПУ Джойстик и ручка управления двигателем
- 31. Периферийные устройства НПУ
- 34. Очки дополненной реальности Периферийные устройства НПУ
- 35. Шлем виртуальной реальности
- 36. Дополнительная панель с кнопками и тумблерами
- 37. Источник питания
- 38. Информационное обеспечение пилота Внешний оператор БПВС управляет аппаратом за счет джойстика/штурвала, ручкой управления двигателем, педалями или
- 39. Режим управления БПВС Ручной режим Режим управления без включения в контур автомата стабилизации. Используется как резервный
- 40. Режим управления БПВС
- 41. Режимы работы автопилота Взлет Максимальная тяга двигателем Точное выдерживание курса ВПП. Управление курсом плавно переходит от
- 42. Режимы работы автопилота
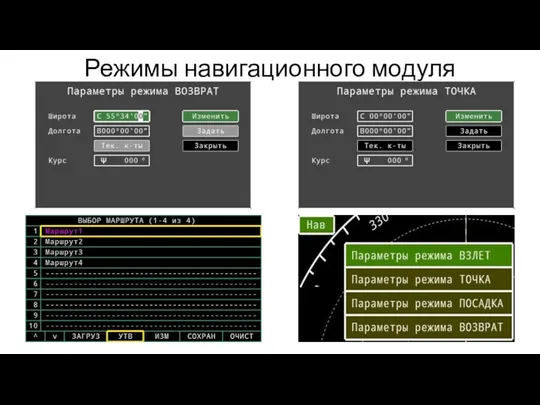
- 43. Режимы навигационного модуля Навигационный модуль рассчитывает летные параметры выдерживаемые автопилотом для оптимального выполнения полетного задания. Само
- 44. Режимы навигационного модуля
- 45. Настройка коэффициентов автомата стабилизации
- 46. Телеметрия
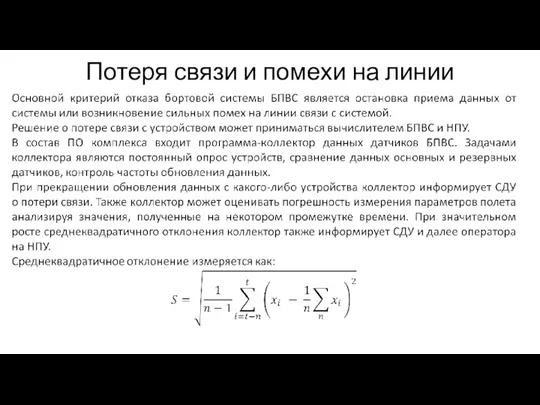
- 47. Подтверждение приема сообщений бортом Важным элементом системы мониторинга и предупреждения отказов является постоянное подтверждение разовых команда
- 48. Сообщение о неисправности от датчиков БПВС Датчик либо другое устройство на борту БПВС может иметь программное
- 49. Потеря связи и помехи на линии
- 50. Методы определения отказов Методы определения отказов Визуальный Автоматические методы Статический критерий отказа Нечеткая логика Нейронные сети
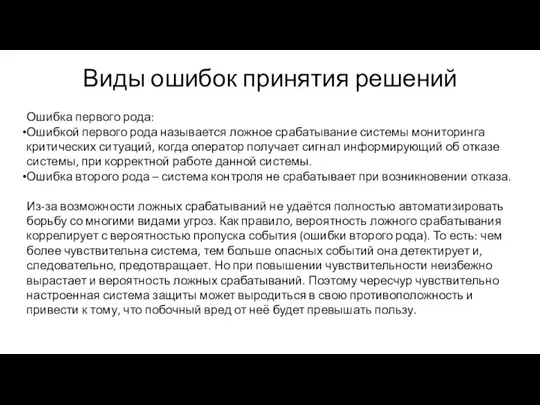
- 51. Виды ошибок принятия решений Ошибка первого рода: Ошибкой первого рода называется ложное срабатывание системы мониторинга критических
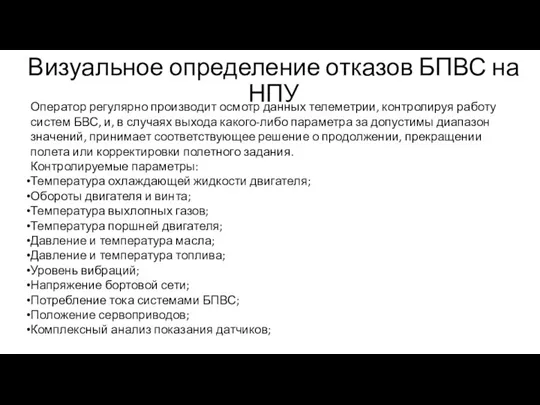
- 52. Визуальное определение отказов БПВС на НПУ Оператор регулярно производит осмотр данных телеметрии, контролируя работу систем БВС,
- 53. Статический критерий отказов Система контроля состояния БПВС производит постоянный мониторинг показания датчиков и принимает решении предупреждении
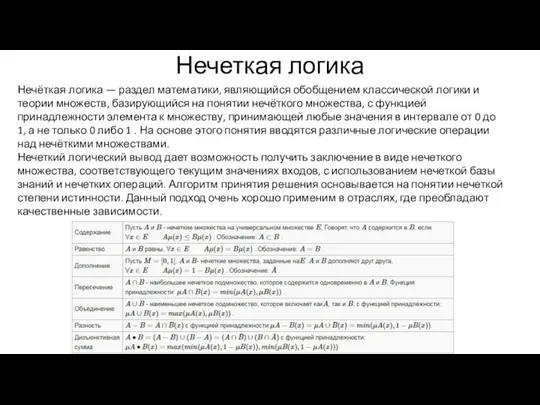
- 54. Нечеткая логика Нечёткая логика — раздел математики, являющийся обобщением классической логики и теории множеств, базирующийся на
- 55. Возможность оперировать нечеткими входными данными: например, непрерывно изменяющиеся во времени значения (динамические задачи), значения, которые невозможно
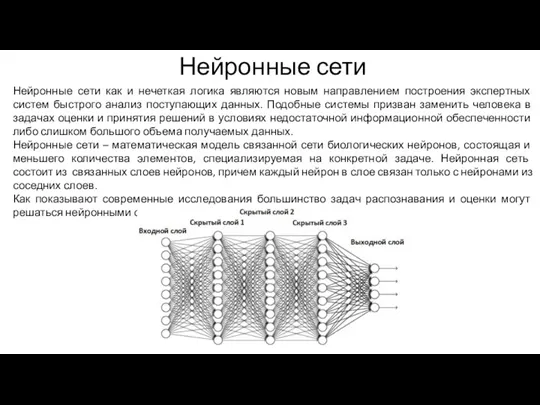
- 56. Нейронные сети Нейронные сети как и нечеткая логика являются новым направлением построения экспертных систем быстрого анализ
- 57. Нейронные сети Достоинства: Адаптивное обучение сети; Общие принципы построения не зависящие от области применения; Широкий спектр
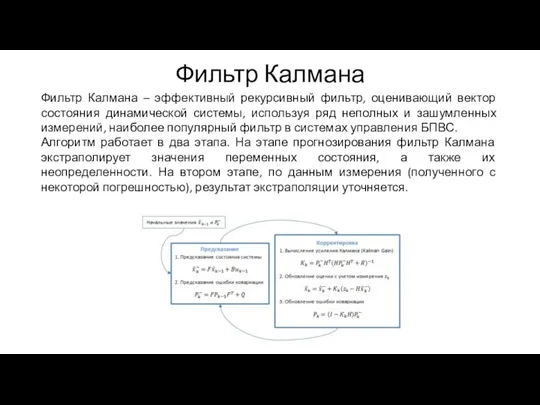
- 58. Фильтр Калмана Фильтр Калмана – эффективный рекурсивный фильтр, оценивающий вектор состояния динамической системы, используя ряд неполных
- 59. Использование фильтра Калмана Фильтр позволяет решить следующие задачи: Рекурсивная фильтрация данных с минимальной фазовой задержкой; Количественная
- 60. Устранение неисправностей С целью устранения неисправности и их последствий выполняются следующие действия: Перевод комплекса на резервную
- 61. Аварийный возврат БПВС домой В случаях отказа элементов комплекс БПВС включая полезную нагрузку оператор или СДУ
- 63. Скачать презентацию

Пункты наземного управления (НПУ)
Цент управления БПВС, который предоставляет возможности для управления
Пункты наземного управления (НПУ)
Цент управления БПВС, который предоставляет возможности для управления
Требования и задачи
Обеспечение устойчивой связи с БПВС по различным каналам (спутниковая
Требования и задачи
Обеспечение устойчивой связи с БПВС по различным каналам (спутниковая
Состав НПУ
Наземная станция управления включает в себя:
Системы связи и линии передачи
Состав НПУ
Наземная станция управления включает в себя:
Системы связи и линии передачи
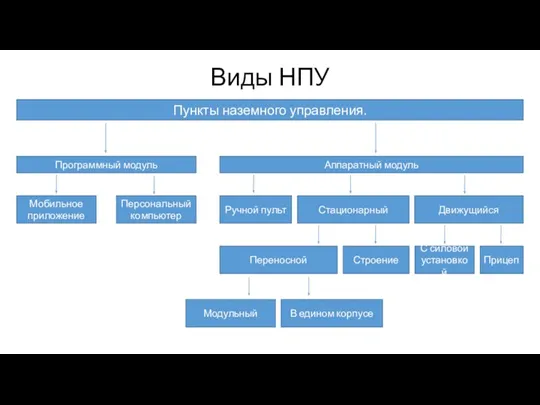
Виды НПУ
Пункты наземного управления.
Программный модуль
Аппаратный модуль
Мобильное приложение
Персональный компьютер
Ручной пульт
Стационарный
Движущийся
Переносной
Строение
С силовой
установкой
Прицеп
Модульный
В едином
Виды НПУ
Пункты наземного управления.
Программный модуль
Аппаратный модуль
Мобильное приложение
Персональный компьютер
Ручной пульт
Стационарный
Движущийся
Переносной
Строение
С силовой
установкой
Прицеп
Модульный
В едином
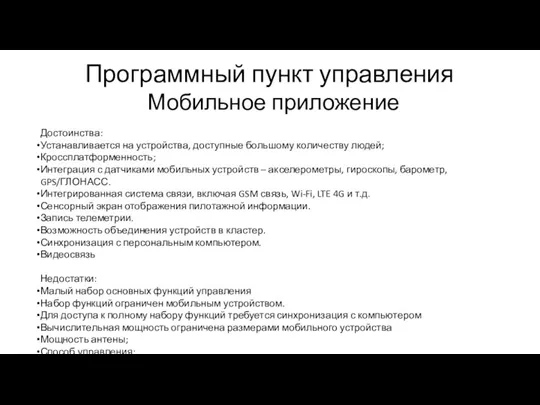
Программный пункт управления
Мобильное приложение
Достоинства:
Устанавливается на устройства, доступные большому количеству людей;
Кроссплатформенность;
Интеграция с
Программный пункт управления
Мобильное приложение
Достоинства:
Устанавливается на устройства, доступные большому количеству людей;
Кроссплатформенность;
Интеграция с

Программный пункт управления
Мобильное приложение
MAV Pilot 1.4
Программный пункт управления
Мобильное приложение
MAV Pilot 1.4
Программный пункт управления
Персональный компьютер
Достоинства:
Устанавливается на устройства, доступные большому количеству людей
Кроссплатформенность
Широкий функционал
Высокая
Программный пункт управления
Персональный компьютер
Достоинства:
Устанавливается на устройства, доступные большому количеству людей
Кроссплатформенность
Широкий функционал
Высокая
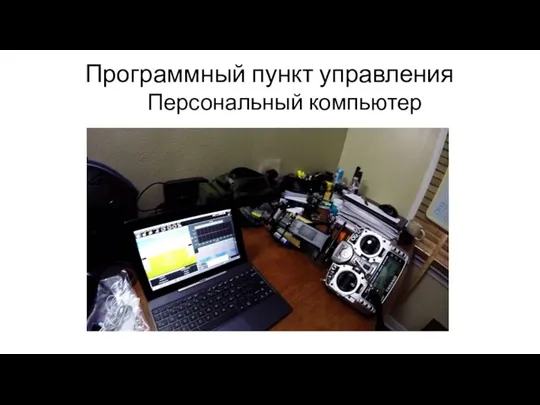
Программный пункт управления
Персональный компьютер
Программный пункт управления
Персональный компьютер
Аппаратный пункт управления
Ручной пульт
Простейший пульт управления помещающийся в руках, с минимальным
Аппаратный пункт управления
Ручной пульт
Простейший пульт управления помещающийся в руках, с минимальным



Передвигающиеся НПУ
Плюсы:
Полная автономность работы
Быстрая смена позиции
Оперативная развертка
Работа НПУ во время движения
Возможность
Передвигающиеся НПУ
Плюсы:
Полная автономность работы
Быстрая смена позиции
Оперативная развертка
Работа НПУ во время движения
Возможность







Стационарный пункт управления
Центр управления полетами
Стационарный пункт управления
Центр управления полетами
Переносной НПУ
Наиболее распространенные вид НПУ.
Как правило состоит из:
Основа - персональный
Переносной НПУ
Наиболее распространенные вид НПУ.
Как правило состоит из:
Основа - персональный
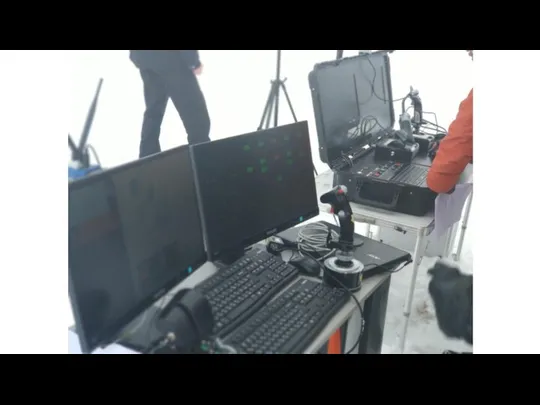
Неразборный переносной НПУ
Полностью собранный комплекс наземного управления БПВС, готовый к использованию
Неразборный переносной НПУ
Полностью собранный комплекс наземного управления БПВС, готовый к использованию
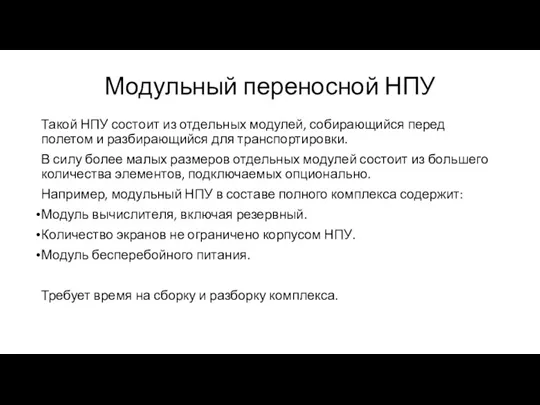
Модульный переносной НПУ
Такой НПУ состоит из отдельных модулей, собирающийся перед полетом
Модульный переносной НПУ
Такой НПУ состоит из отдельных модулей, собирающийся перед полетом


Периферийные устройства НПУ
Радиомодем с мачтой
Барометр
Периферийные устройства НПУ
Радиомодем с мачтой
Барометр

Периферийные устройства НПУ
Джойстик и ручка управления двигателем
Периферийные устройства НПУ
Джойстик и ручка управления двигателем

Периферийные устройства НПУ
Периферийные устройства НПУ


Очки дополненной реальности
Периферийные устройства НПУ
Очки дополненной реальности
Периферийные устройства НПУ
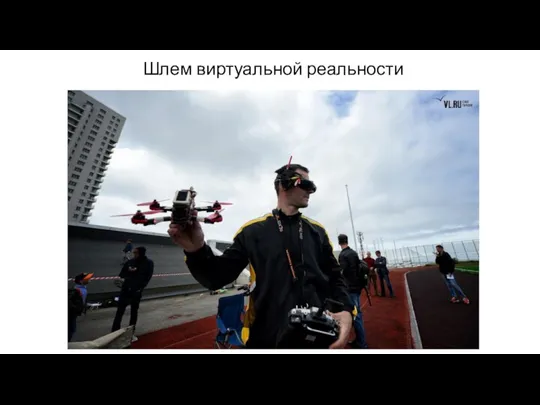
Шлем виртуальной реальности
Шлем виртуальной реальности

Дополнительная панель с кнопками и тумблерами
Дополнительная панель с кнопками и тумблерами

Источник питания
Источник питания
Информационное обеспечение пилота
Внешний оператор БПВС управляет аппаратом за счет джойстика/штурвала, ручкой
Информационное обеспечение пилота
Внешний оператор БПВС управляет аппаратом за счет джойстика/штурвала, ручкой
Режим управления БПВС
Ручной режим
Режим управления без включения в контур автомата стабилизации.
Режим управления БПВС
Ручной режим
Режим управления без включения в контур автомата стабилизации.

Режим управления БПВС
Режим управления БПВС
Режимы работы автопилота
Взлет
Максимальная тяга двигателем
Точное выдерживание курса ВПП.
Управление курсом плавно переходит
Режимы работы автопилота
Взлет
Максимальная тяга двигателем
Точное выдерживание курса ВПП.
Управление курсом плавно переходит

Режимы работы автопилота
Режимы работы автопилота
Режимы навигационного модуля
Навигационный модуль рассчитывает летные параметры выдерживаемые автопилотом для оптимального
Режимы навигационного модуля
Навигационный модуль рассчитывает летные параметры выдерживаемые автопилотом для оптимального
Режимы навигационного модуля
Режимы навигационного модуля

Настройка коэффициентов автомата стабилизации
Настройка коэффициентов автомата стабилизации
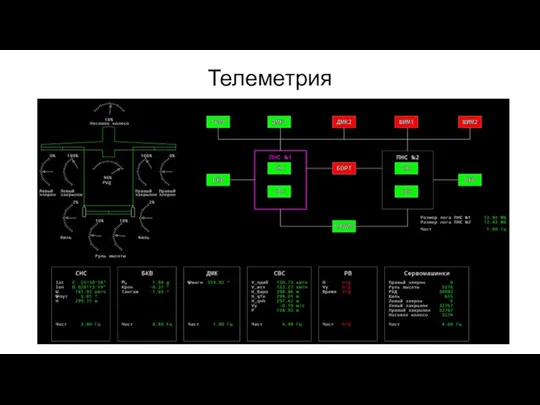
Телеметрия
Телеметрия
Подтверждение приема сообщений бортом
Важным элементом системы мониторинга и предупреждения отказов является
Подтверждение приема сообщений бортом
Важным элементом системы мониторинга и предупреждения отказов является
Сообщение о неисправности от датчиков БПВС
Датчик либо другое устройство на борту
Сообщение о неисправности от датчиков БПВС
Датчик либо другое устройство на борту
Потеря связи и помехи на линии
Потеря связи и помехи на линии
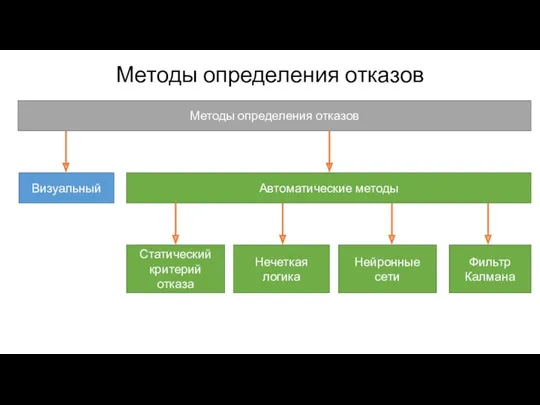
Методы определения отказов
Методы определения отказов
Визуальный
Автоматические методы
Статический
критерий отказа
Нечеткая логика
Нейронные сети
Фильтр Калмана
Методы определения отказов
Методы определения отказов
Визуальный
Автоматические методы
Статический
критерий отказа
Нечеткая логика
Нейронные сети
Фильтр Калмана
Виды ошибок принятия решений
Ошибка первого рода:
Ошибкой первого рода называется ложное срабатывание
Виды ошибок принятия решений
Ошибка первого рода:
Ошибкой первого рода называется ложное срабатывание
Визуальное определение отказов БПВС на НПУ
Оператор регулярно производит осмотр данных телеметрии,
Визуальное определение отказов БПВС на НПУ
Оператор регулярно производит осмотр данных телеметрии,
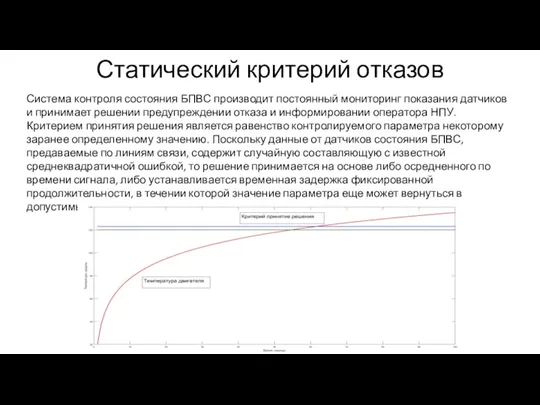
Статический критерий отказов
Система контроля состояния БПВС производит постоянный мониторинг показания датчиков
Статический критерий отказов
Система контроля состояния БПВС производит постоянный мониторинг показания датчиков
Нечеткая логика
Нечёткая логика — раздел математики, являющийся обобщением классической логики и
Нечеткая логика
Нечёткая логика — раздел математики, являющийся обобщением классической логики и
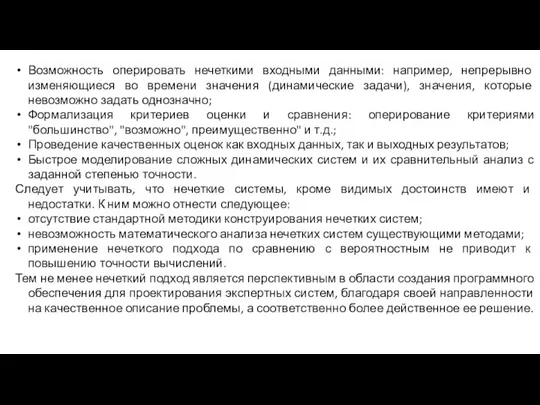
Возможность оперировать нечеткими входными данными: например, непрерывно изменяющиеся во времени значения
Возможность оперировать нечеткими входными данными: например, непрерывно изменяющиеся во времени значения
Нейронные сети
Нейронные сети как и нечеткая логика являются новым направлением построения
Нейронные сети
Нейронные сети как и нечеткая логика являются новым направлением построения
Нейронные сети
Достоинства:
Адаптивное обучение сети;
Общие принципы построения не зависящие от области применения;
Широкий
Нейронные сети
Достоинства:
Адаптивное обучение сети;
Общие принципы построения не зависящие от области применения;
Широкий
Фильтр Калмана
Фильтр Калмана – эффективный рекурсивный фильтр, оценивающий вектор состояния динамической
Фильтр Калмана
Фильтр Калмана – эффективный рекурсивный фильтр, оценивающий вектор состояния динамической
Использование фильтра Калмана
Фильтр позволяет решить следующие задачи:
Рекурсивная фильтрация данных с минимальной
Использование фильтра Калмана
Фильтр позволяет решить следующие задачи:
Рекурсивная фильтрация данных с минимальной
Устранение неисправностей
С целью устранения неисправности и их последствий выполняются следующие действия:
Перевод
Устранение неисправностей
С целью устранения неисправности и их последствий выполняются следующие действия:
Перевод
Аварийный возврат БПВС домой
В случаях отказа элементов комплекс БПВС включая полезную
Аварийный возврат БПВС домой
В случаях отказа элементов комплекс БПВС включая полезную
 Пионеры-герои войны
Пионеры-герои войны Откуда пришел шоколад?
Откуда пришел шоколад? Структура газообразных, жидких и твердых тел. 5 класс
Структура газообразных, жидких и твердых тел. 5 класс Вечірні молитви
Вечірні молитви Зарядка для мозга
Зарядка для мозга 20190215_byudzhet_semi._dohody_i_rashody
20190215_byudzhet_semi._dohody_i_rashody Организационная структура управления предприятием
Организационная структура управления предприятием Виды электрического кабеля
Виды электрического кабеля Предметы крестьянского быта. Веретено
Предметы крестьянского быта. Веретено Традиции и культура русского народа
Традиции и культура русского народа Логопедическая образовательная деятельность по формированию лексико-грамматических средств языка и развитию связной речи в рамках дня открытых дверей с детьми старшей возрастной группы: Говорушкины угощения
Логопедическая образовательная деятельность по формированию лексико-грамматических средств языка и развитию связной речи в рамках дня открытых дверей с детьми старшей возрастной группы: Говорушкины угощения 20231105_prezentatsiya
20231105_prezentatsiya Реализация основных принципов обучения английскому языку на начальном этапе
Реализация основных принципов обучения английскому языку на начальном этапе итоговый урок по теме: Африка 7 кл
итоговый урок по теме: Африка 7 кл Надкласс рыбы
Надкласс рыбы Экология России
Экология России Основы христианской культуры в духовной жизни народа
Основы христианской культуры в духовной жизни народа Правила дорожного движения
Правила дорожного движения Влияние сотового телефона на здоровье человека
Влияние сотового телефона на здоровье человека с.р.игра
с.р.игра Проект Что делать с мусором
Проект Что делать с мусором Кадровая политика ПАО Газпром
Кадровая политика ПАО Газпром Шок. Виды. Классификация. Интенсивная терапия
Шок. Виды. Классификация. Интенсивная терапия презентация Инновационный проект Использование информационно-коммуникационных технологий в условиях семейного детского сада
презентация Инновационный проект Использование информационно-коммуникационных технологий в условиях семейного детского сада Вредные привычки и их последствия.
Вредные привычки и их последствия. Военно-патриотический лагерь Вымпел-Заручевье
Военно-патриотический лагерь Вымпел-Заручевье Музыкотерапия как метод коррекции эмоционально-волевой сферы детей
Музыкотерапия как метод коррекции эмоционально-волевой сферы детей Растительные генетические ресурсы в селекции растений
Растительные генетические ресурсы в селекции растений