- Разработка алгоритма ориентации роботизированных платформ с учетом датчиков

Содержание
- 2. Цель Разработка или оптимизация существующего алгоритма, позволяющий роботизированным платформам ориентироваться в пространстве, строить карту местности и
- 3. Задачи Изучить предметную область Поиск и анализ аналогичных программных средств для решения схожих задач Разработка программного
- 4. Метод одновременной локализации и построения карты (Simultaneous Localization and Mapping) SLAM Где я? Как выглядит мир?
- 6. Построение карты с помощью SLAM
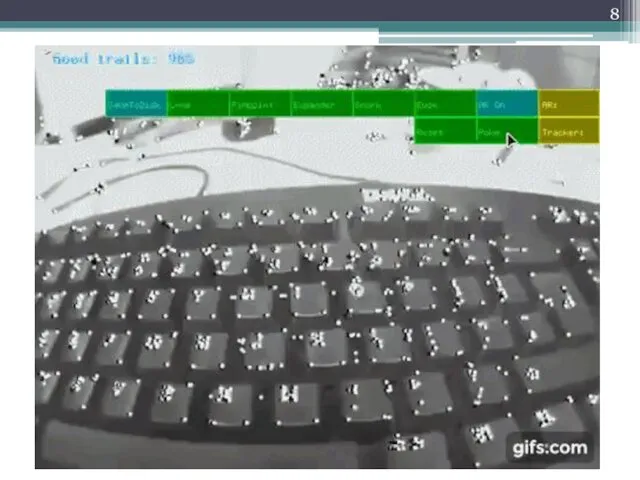
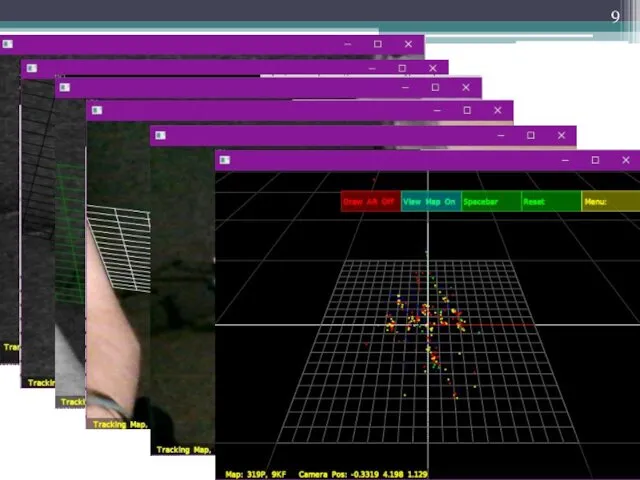
- 7. Parallel Tracking and Mapping (Параллельное отслеживание и построение карты) Разделение Tracking и Mapping Используется тысячи ключевых
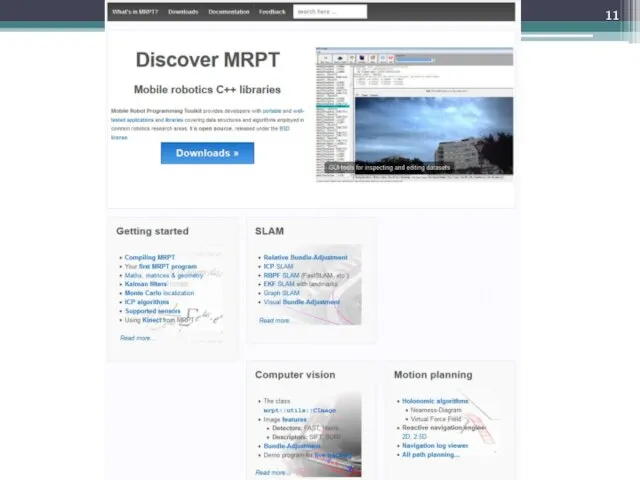
- 10. Mobile Robot Programming Toolkit (Инструментарий для программирования мобильных роботов) Предоставляет разработчикам портативные и хорошо протестированные приложения
- 13. Скачать презентацию
Цель
Разработка или оптимизация существующего алгоритма, позволяющий роботизированным платформам ориентироваться в пространстве,
Цель
Разработка или оптимизация существующего алгоритма, позволяющий роботизированным платформам ориентироваться в пространстве,
Задачи
Изучить предметную область
Поиск и анализ аналогичных программных средств для решения схожих
Задачи
Изучить предметную область
Поиск и анализ аналогичных программных средств для решения схожих
Метод одновременной локализации и построения карты (Simultaneous Localization and Mapping)
SLAM
Где
Метод одновременной локализации и построения карты (Simultaneous Localization and Mapping)
SLAM
Где

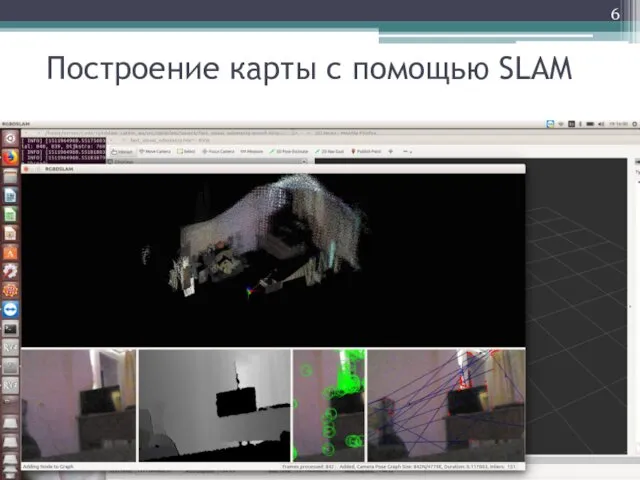
Построение карты с помощью SLAM
Построение карты с помощью SLAM
Parallel Tracking and Mapping (Параллельное отслеживание и построение карты)
Разделение Tracking и
Parallel Tracking and Mapping (Параллельное отслеживание и построение карты)
Разделение Tracking и

Mobile Robot Programming Toolkit
(Инструментарий для программирования мобильных роботов)
Предоставляет разработчикам портативные
Mobile Robot Programming Toolkit
(Инструментарий для программирования мобильных роботов)
Предоставляет разработчикам портативные
 Самоиндукция. Индуктивность
Самоиндукция. Индуктивность Частотно – регулируемый асинхронный электропривод
Частотно – регулируемый асинхронный электропривод Правотворчество и формирование закона
Правотворчество и формирование закона Деревянные балки в покрытиях и перекрытиях
Деревянные балки в покрытиях и перекрытиях Сердечнолегочная реанимация у детей
Сердечнолегочная реанимация у детей Конкурентные преимущества Raw Life Protein
Конкурентные преимущества Raw Life Protein Роль родного языка и речи в развитии ребенка
Роль родного языка и речи в развитии ребенка НУЗ Дорожная клиническая больница ОАО РЖД. Преимущества на рынке медицинских услуг
НУЗ Дорожная клиническая больница ОАО РЖД. Преимущества на рынке медицинских услуг Организация контроля на уроках информатики
Организация контроля на уроках информатики Approaches. Discussion
Approaches. Discussion Таблица умножения и деления на 2
Таблица умножения и деления на 2 Импульс тела. Закон сохранения импульса. Реактивное движение
Импульс тела. Закон сохранения импульса. Реактивное движение Право на образование
Право на образование Старая Уфа
Старая Уфа Доказательная медицина. Формулярная система. Фармакоэпидемиология
Доказательная медицина. Формулярная система. Фармакоэпидемиология Казань - спортивная столица
Казань - спортивная столица Социальное партнёрство с родителями, как условие развития творческих способностей обучающихся
Социальное партнёрство с родителями, как условие развития творческих способностей обучающихся  Разработка GIF-анимации через Photoshop
Разработка GIF-анимации через Photoshop Основні симптоми та синдроми при цукровому діабеті
Основні симптоми та синдроми при цукровому діабеті Неопределенные местоимения
Неопределенные местоимения Системы двух линейных уравнений с двумя переменными, как математические модели реальных ситуаций. 7 класс
Системы двух линейных уравнений с двумя переменными, как математические модели реальных ситуаций. 7 класс Колядки
Колядки Грыжи. Классификация грыж
Грыжи. Классификация грыж Методы исследования механической активности сердца
Методы исследования механической активности сердца Производство облицовочных работ
Производство облицовочных работ Ресторан BigMama
Ресторан BigMama Психические и поведенческие расстройства в результате употребления летучих растворителей (ингалянтов)
Психические и поведенческие расстройства в результате употребления летучих растворителей (ингалянтов) Презентация проекта Волшебная пуговица.
Презентация проекта Волшебная пуговица.