- Робототехника

Содержание
- 2. РОБОТОТЕХНИКА Робототе́хника (от робот и техника; англ. robotics — роботика, роботехника) — прикладная наука, занимающаяся разработкой
- 3. Содержание: История создания; Компоненты роботов; Важнейшие классы роботов; Методы перемещения; Системы управления; Образование; Хронология; Законы робототехники.
- 4. История создания Робот – от словацкого «rabota» (тяжелый труд, каторга, барщина), создан для того, чтобы заменить
- 5. Компоненты роботов Приводы Нога робота, работающая на воздушных мышцах. Приводы: это «мышцы» роботов. В настоящее время
- 6. Важнейшие классы Важнейшие классы роботов широкого назначения — манипуляционные и мобильные роботы. Манипуляционный робот — автоматическая
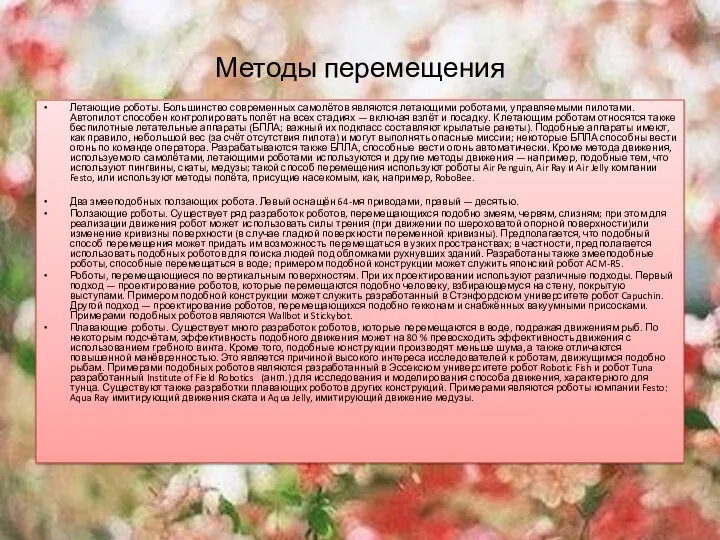
- 7. Методы перемещения Летающие роботы. Большинство современных самолётов являются летающими роботами, управляемыми пилотами. Автопилот способен контролировать полёт
- 8. Два змееподобных ползающих робота. Левый оснащён 64-мя приводами, правый — десятью.
- 9. Система управления Под управлением роботом понимается решение комплекса задач, связанных с адаптацией робота к кругу решаемых
- 10. Образование Робототехнические комплексы также популярны в области образования как современные высокотехнологичные исследовательские инструменты в области теории
- 11. Хронология Конец XIX века — русский инженер Пафнутий Чебышёв придумал механизм — стопоход, обладающий высокой проходимостью.
- 12. Эволюция роботов
- 13. Законы робототехники Три закона робототехники для роботов Первый Закон: Робот не может причинить вред человеку или
- 15. Скачать презентацию
РОБОТОТЕХНИКА
Робототе́хника (от робот и техника; англ. robotics — роботика, роботехника) —
РОБОТОТЕХНИКА
Робототе́хника (от робот и техника; англ. robotics — роботика, роботехника) —
Содержание:
История создания;
Компоненты роботов;
Важнейшие классы роботов;
Методы перемещения;
Системы управления;
Образование;
Хронология;
Законы робототехники.
Содержание:
История создания;
Компоненты роботов;
Важнейшие классы роботов;
Методы перемещения;
Системы управления;
Образование;
Хронология;
Законы робототехники.
История создания
Робот – от словацкого «rabota» (тяжелый труд, каторга, барщина), создан
История создания
Робот – от словацкого «rabota» (тяжелый труд, каторга, барщина), создан

Компоненты роботов
Приводы
Нога робота, работающая на воздушных мышцах.
Приводы: это «мышцы» роботов. В
Компоненты роботов
Приводы
Нога робота, работающая на воздушных мышцах.
Приводы: это «мышцы» роботов. В
Важнейшие классы
Важнейшие классы роботов широкого назначения — манипуляционные и мобильные роботы.
Манипуляционный
Важнейшие классы
Важнейшие классы роботов широкого назначения — манипуляционные и мобильные роботы.
Манипуляционный
Методы перемещения
Летающие роботы. Большинство современных самолётов являются летающими роботами, управляемыми пилотами.
Методы перемещения
Летающие роботы. Большинство современных самолётов являются летающими роботами, управляемыми пилотами.

Два змееподобных ползающих робота. Левый оснащён 64-мя приводами, правый — десятью.
Два змееподобных ползающих робота. Левый оснащён 64-мя приводами, правый — десятью.
Система управления
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией
Система управления
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией
Образование
Робототехнические комплексы также популярны в области образования как современные высокотехнологичные исследовательские
Образование
Робототехнические комплексы также популярны в области образования как современные высокотехнологичные исследовательские
Хронология
Конец XIX века — русский инженер Пафнутий Чебышёв придумал механизм —
Хронология
Конец XIX века — русский инженер Пафнутий Чебышёв придумал механизм —
Эволюция роботов
Эволюция роботов
Законы робототехники
Три закона робототехники для роботов
Первый Закон:
Робот не может причинить вред
Законы робототехники
Три закона робототехники для роботов
Первый Закон:
Робот не может причинить вред
 Психология пищевого поведения подростков и взрослых
Психология пищевого поведения подростков и взрослых Колоректальный рак
Колоректальный рак Иерархия построения радиотехнической системы
Иерархия построения радиотехнической системы ПРЕЗЕНТАЦИЯ ДЛЯ ВОСПИТАТЕЛЕЙ ТРЕБОВАНИЯ К ОРГАНИЗАЦИИ КНИЖНОГО УГОЛКА
ПРЕЗЕНТАЦИЯ ДЛЯ ВОСПИТАТЕЛЕЙ ТРЕБОВАНИЯ К ОРГАНИЗАЦИИ КНИЖНОГО УГОЛКА Государство Украина
Государство Украина Краеведение - наука о местности, в которой мы живём. Предмет биологического краеведения.
Краеведение - наука о местности, в которой мы живём. Предмет биологического краеведения. Формы организации производства
Формы организации производства С днем рождения, Ксюша
С днем рождения, Ксюша Продолжение Электронное портфолио 23 февраля
Продолжение Электронное портфолио 23 февраля 17.04. Літ. чит. М. Трублаїні Шоколад
17.04. Літ. чит. М. Трублаїні Шоколад Сильвестр Ольшевский, архиепископ Омский
Сильвестр Ольшевский, архиепископ Омский Первичная обр.рыбы
Первичная обр.рыбы Виды и оформление организационно-распорядительной документации
Виды и оформление организационно-распорядительной документации Кубань в каменном веке
Кубань в каменном веке Детёныши животных
Детёныши животных Изображение фигуры человека
Изображение фигуры человека Ф. И. Тютчев. 1803 – 1873 гг. Страницы биографии и творчества
Ф. И. Тютчев. 1803 – 1873 гг. Страницы биографии и творчества Культура речи, как основа эффективного общения
Культура речи, как основа эффективного общения Пищевые связи в экосистеме. Трофические уровни. Типы пищевых цепей
Пищевые связи в экосистеме. Трофические уровни. Типы пищевых цепей Генеральный план. Благоустройство территории
Генеральный план. Благоустройство территории Великобритания на рубеже XIX-XX веков
Великобритания на рубеже XIX-XX веков Легендарный разведчик Николай Иванович Кузнецов
Легендарный разведчик Николай Иванович Кузнецов Кавказские Минеральные Воды
Кавказские Минеральные Воды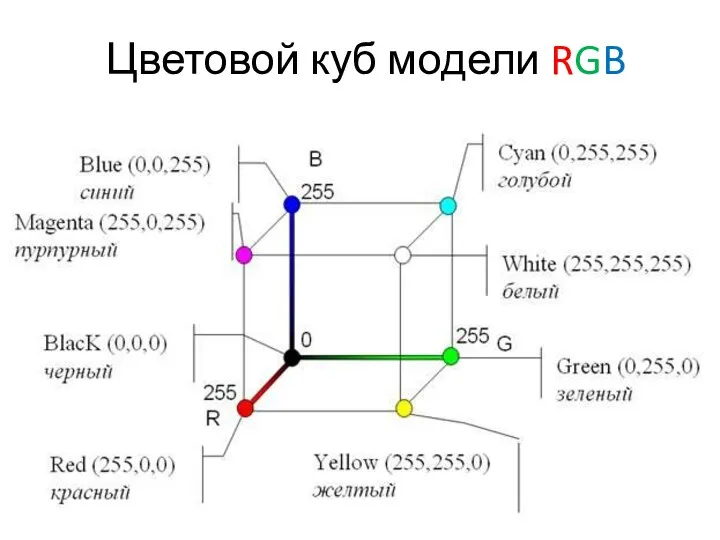 карточка RGB Диск
карточка RGB Диск Методы медицинской генетики человека
Методы медицинской генетики человека Повышение надежности систем электроснабжения
Повышение надежности систем электроснабжения Древняя Индия
Древняя Индия Явление царя. Подвиг искупления
Явление царя. Подвиг искупления