- Сенсорика и программируемые контроллеры

Содержание
- 2. Понятия и определения Датчик — конструктивно обособленный первичный измерительный преобразователь, от которого поступают сигналы измерительной информации
- 3. Все измерения начинаются с восприятия измеряемых величин и формирования измерительного сигнала, который далее подвергается необходимым преобразованиям.
- 4. Таким образом, под датчиком следует понимать конструктивно обособленную совокупность первичных измерительных преобразователей, воспринимающую одну или несколько
- 5. Преобразователь конвертирует один тип энергии в другой, тогда как датчик преобразует любой тип энергии внешнего воздействия
- 6. термин «сенсор» акцентирует внимание на восприятии входной величины, а термин «датчик» — на формировании и выдаче
- 7. Характеристики датчиков - передаточная функция; - максимальный входной сигнал; - диапазон измеряемых значений; - точность; -
- 8. Передаточная функция Передаточная функция устанавливает взаимосвязь между выходным электрическим сигналом датчика S и внешним воздействием s:
- 9. Максимальный входной сигнал Эта величина показывает максимально возможное значение входного сигнала, которое датчик может преобразовать в
- 10. Диапазон выходных значений Диапазон выходных значений — алгебраическая разность между электрическими выходными сигналами, измеренными при максимальном
- 11. Точность Под погрешностью измерений, как правило, понимают величину максимального расхождения между показаниями реального и идеального датчиков.
- 12. Калибровка Если производственные допуски на датчик и допуски на интерфейс (схемы преобразования сигналов) превышают требуемую точность
- 13. Ошибка калибровки Ошибка калибровки — это погрешность, допущенная производителем при проведении калибровки датчика на заводе.
- 14. Гистерезис Гистерезис — это разность значений выходного сигнала для одного и того же входного сигнала, полученных
- 15. Нелинейность Под нелинейностью понимается максимальное отклонение L реальной передаточной функции от аппроксимирующей прямой линии.
- 16. Насыщение Каждый датчик имеет свои пределы рабочих характеристик. Даже если он считается линейным, при определенном уровне
- 17. Воспроизводимость Воспроизводимость - это способность датчика при соблюдении одинаковых условий выдавать идентичные результаты.
- 18. Мёртвая зона Мертвая зона — это нечувствительность датчика в определенном диапазоне входных сигналов. В пределах этой
- 19. Разрешающая способность Разрешающая способность характеризует минимальное изменение измеряемой величины, которое может почувствовать датчик.
- 20. Выходной импеданс Выходной импеданс является характеристикой, указывающей насколько легко датчик согласовывается с электронной схемой.
- 21. Сигнал возбуждения Сигнал возбуждения — это электрический сигнал, необходимый активному датчику для работы.
- 22. Динамические характеристики Динамические свойства датчиков зачастую определяют быстродействие всего измерительного устройства.
- 23. Физические принципы датчиков Датчики являются преобразователями обычно неэлектрических физических величин в электрические сигналы. Перед тем как
- 24. Электрические заряды, поля и потенциалы Существует две разновидности зарядов: положительные и отрицательные. Электрические заряды не могут
- 25. Ёмкость Устройство из двух пластин, способных сохранять электрический заряд, называется конденсатором. Конденсатор характеризуется величиной заряда q,
- 26. Магнетизм У электричества и магнетизма есть много общих черт. Возникновение магнитного поля вокруг движущихся электрических зарядов
- 27. Индукция Закон Фарадея о магнитной индукции гласит, что индуцированное напряжение или электродвижущая сила (э.д.с.) в контуре
- 28. Сопротивление Для каждого материала есть удельное сопротивление - характеристика, описывающая его способность пропускать электрический ток. При
- 29. Пьезоэлектрический эффект Пьезоэлектрический эффект заключается в образовании в кристаллическом материале электрических зарядов при приложении к нему
- 30. Пироэлектрический эффект Пироэлектрики — это материалы с кристаллической структурой, в которых при воздействии на них тепловым
- 31. Эффект Холла В настоящее время датчики Холла используются для обнаружения магнитных полей и определения положения и
- 32. Эффекты Зеебека и Пельтье Эффект Зеебека заключается в поглощении или высвобождении тепла линейно пропорционально току, проходящего
- 33. Звуковые волны Звуковыми волнами называются периодические сжатия и расширения среды (твердых тел, жидкостей и газов), происходящие
- 34. Температурные и тепловые свойства материалов Можно считать, что температура является мерой кинетической энергии колеблющихся частиц. Чем
- 35. Теплопередача Тепловая энергия может быть передана от объекта к объекту тремя способами: теплопроводностью, конвекцией и излучением.
- 36. Световое излучение Световое излучение — очень эффективная форма энергии, по изменению которой можно судить о многих
- 37. Классификации датчиков По виду входных величин: активные; пассивные. По количеству входных величин: одномерные (п = 1);
- 38. По виду модуляции выходного сигнала: амплитудные; частотные и фазовые; непрерывные; импульсные. По технологии изготовления: элементные; интегральные.
- 39. Устройство и основополагающие принципы работы датчиков
- 40. Детекторы положения и перемещения Датчики положения — это, как правило, линейные устройства, выходные сигналы которых соответствуют
- 41. Датчики скорости и ускорения
- 42. Тензодатчики Тензодатчик — это гибкий резистивный чувствительный элемент, сопротивление которого пропорционально приложенному механическому напряжению (величине деформации).
- 43. Датчики давления В состав датчика входят следующие компоненты: пассивный кристалл оптического преобразователя давления с диафрагмой, вытравленной
- 44. Рис. 3.3 Оптоэлектронный датчик давления
- 45. Акустические датчики
- 46. Световые датчики Все детекторы световых излучений можно разделить на две группы: квантовые и тепловые преобразователи. Квантовые
- 47. Датчики температуры Самым распространённым детектором температуры в технических системах является термопара. Термопары относятся к классу относительных
- 48. Применение датчиков в мехатронных системах Типичная мехатронная система — тормозная система автомобиля с АБС (антиблокировочной системой).
- 49. Датчики в промышленной технике измерений В настоящее время широко применяются в области промышленной техники следующие датчики:
- 50. Рисунок 4.1 – Оптический датчик для управления процессом сварки
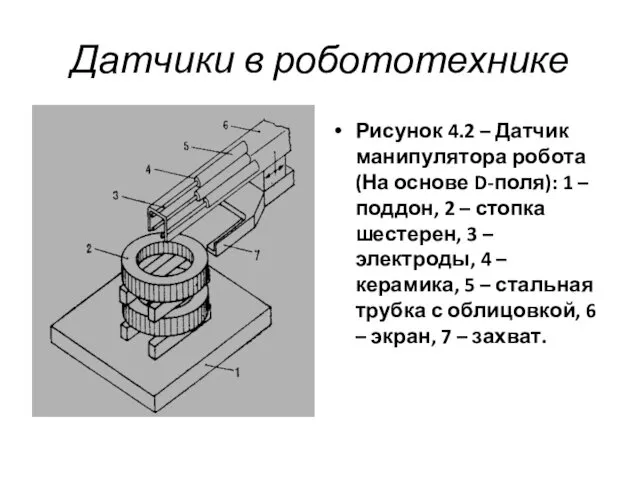
- 51. Датчики в робототехнике Рисунок 4.2 – Датчик манипулятора робота (На основе D-поля): 1 – поддон, 2
- 52. Рисунок 4.3 – Принцип действия датчика на основе измерения D-поля.
- 54. Скачать презентацию
Понятия и определения
Датчик — конструктивно обособленный первичный измерительный преобразователь, от которого
Понятия и определения
Датчик — конструктивно обособленный первичный измерительный преобразователь, от которого
Все измерения начинаются с восприятия измеряемых величин и формирования измерительного сигнала,
Все измерения начинаются с восприятия измеряемых величин и формирования измерительного сигнала,
Таким образом, под датчиком следует понимать конструктивно обособленную совокупность первичных измерительных
Таким образом, под датчиком следует понимать конструктивно обособленную совокупность первичных измерительных
Преобразователь конвертирует один тип энергии в другой, тогда как датчик преобразует
Преобразователь конвертирует один тип энергии в другой, тогда как датчик преобразует
термин «сенсор» акцентирует внимание на восприятии входной величины, а термин «датчик»
термин «сенсор» акцентирует внимание на восприятии входной величины, а термин «датчик»
Характеристики датчиков
- передаточная функция;
- максимальный входной сигнал;
- диапазон измеряемых значений;
- точность;
-
Характеристики датчиков
- передаточная функция;
- максимальный входной сигнал;
- диапазон измеряемых значений;
- точность;
-
Передаточная функция
Передаточная функция устанавливает взаимосвязь между выходным электрическим сигналом датчика S
Передаточная функция
Передаточная функция устанавливает взаимосвязь между выходным электрическим сигналом датчика S
Максимальный входной сигнал
Эта величина показывает максимально возможное значение входного сигнала, которое
Максимальный входной сигнал
Эта величина показывает максимально возможное значение входного сигнала, которое
Диапазон выходных значений
Диапазон выходных значений — алгебраическая разность между электрическими выходными
Диапазон выходных значений
Диапазон выходных значений — алгебраическая разность между электрическими выходными
Точность
Под погрешностью измерений, как правило, понимают величину максимального расхождения между показаниями
Точность
Под погрешностью измерений, как правило, понимают величину максимального расхождения между показаниями
Калибровка
Если производственные допуски на датчик и допуски на интерфейс (схемы преобразования
Калибровка
Если производственные допуски на датчик и допуски на интерфейс (схемы преобразования
Ошибка калибровки
Ошибка калибровки — это погрешность, допущенная производителем при проведении калибровки
Ошибка калибровки
Ошибка калибровки — это погрешность, допущенная производителем при проведении калибровки
Гистерезис
Гистерезис — это разность значений выходного сигнала для одного и того
Гистерезис
Гистерезис — это разность значений выходного сигнала для одного и того
Нелинейность
Под нелинейностью понимается максимальное отклонение L реальной передаточной функции от аппроксимирующей
Нелинейность
Под нелинейностью понимается максимальное отклонение L реальной передаточной функции от аппроксимирующей
Насыщение
Каждый датчик имеет свои пределы рабочих характеристик. Даже если он считается
Насыщение
Каждый датчик имеет свои пределы рабочих характеристик. Даже если он считается
Воспроизводимость
Воспроизводимость - это способность датчика при соблюдении одинаковых условий выдавать идентичные
Воспроизводимость
Воспроизводимость - это способность датчика при соблюдении одинаковых условий выдавать идентичные
Мёртвая зона
Мертвая зона — это нечувствительность датчика в определенном диапазоне входных
Мёртвая зона
Мертвая зона — это нечувствительность датчика в определенном диапазоне входных
Разрешающая способность
Разрешающая способность характеризует минимальное изменение измеряемой величины, которое может почувствовать
Разрешающая способность
Разрешающая способность характеризует минимальное изменение измеряемой величины, которое может почувствовать
Выходной импеданс
Выходной импеданс является характеристикой, указывающей насколько легко датчик согласовывается с
Выходной импеданс
Выходной импеданс является характеристикой, указывающей насколько легко датчик согласовывается с
Сигнал возбуждения
Сигнал возбуждения — это электрический сигнал, необходимый активному датчику для
Сигнал возбуждения
Сигнал возбуждения — это электрический сигнал, необходимый активному датчику для
Динамические характеристики
Динамические свойства датчиков зачастую определяют быстродействие всего измерительного устройства.
Динамические характеристики
Динамические свойства датчиков зачастую определяют быстродействие всего измерительного устройства.
Физические принципы датчиков
Датчики являются преобразователями обычно неэлектрических физических величин в электрические
Физические принципы датчиков
Датчики являются преобразователями обычно неэлектрических физических величин в электрические
Электрические заряды, поля и потенциалы
Существует две разновидности зарядов: положительные и отрицательные.
Электрические заряды, поля и потенциалы
Существует две разновидности зарядов: положительные и отрицательные.
Ёмкость
Устройство из двух пластин, способных сохранять электрический заряд, называется конденсатором. Конденсатор
Ёмкость
Устройство из двух пластин, способных сохранять электрический заряд, называется конденсатором. Конденсатор
Магнетизм
У электричества и магнетизма есть много общих черт. Возникновение магнитного поля
Магнетизм
У электричества и магнетизма есть много общих черт. Возникновение магнитного поля
Индукция
Закон Фарадея о магнитной индукции гласит, что индуцированное напряжение или электродвижущая
Индукция
Закон Фарадея о магнитной индукции гласит, что индуцированное напряжение или электродвижущая
Сопротивление
Для каждого материала есть удельное сопротивление - характеристика, описывающая его способность
Сопротивление
Для каждого материала есть удельное сопротивление - характеристика, описывающая его способность
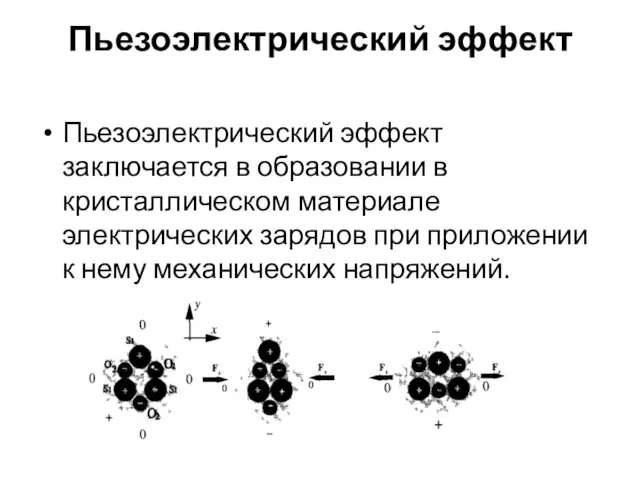
Пьезоэлектрический эффект
Пьезоэлектрический эффект заключается в образовании в кристаллическом материале электрических зарядов
Пьезоэлектрический эффект
Пьезоэлектрический эффект заключается в образовании в кристаллическом материале электрических зарядов
Пироэлектрический эффект
Пироэлектрики — это материалы с кристаллической структурой, в которых при
Пироэлектрический эффект
Пироэлектрики — это материалы с кристаллической структурой, в которых при
Эффект Холла
В настоящее время датчики Холла используются для обнаружения магнитных полей
Эффект Холла
В настоящее время датчики Холла используются для обнаружения магнитных полей
Эффекты Зеебека и Пельтье
Эффект Зеебека заключается в поглощении или высвобождении тепла
Эффекты Зеебека и Пельтье
Эффект Зеебека заключается в поглощении или высвобождении тепла
Звуковые волны
Звуковыми волнами называются периодические сжатия и расширения среды (твердых тел,
Звуковые волны
Звуковыми волнами называются периодические сжатия и расширения среды (твердых тел,
Температурные и тепловые свойства материалов
Можно считать, что температура является мерой кинетической
Температурные и тепловые свойства материалов
Можно считать, что температура является мерой кинетической
Теплопередача
Тепловая энергия может быть передана от объекта к объекту тремя способами:
Теплопередача
Тепловая энергия может быть передана от объекта к объекту тремя способами:
Световое излучение
Световое излучение — очень эффективная форма энергии, по изменению которой
Световое излучение
Световое излучение — очень эффективная форма энергии, по изменению которой
Классификации датчиков
По виду входных величин: активные; пассивные.
По количеству входных величин: одномерные
Классификации датчиков
По виду входных величин: активные; пассивные.
По количеству входных величин: одномерные
По виду модуляции выходного сигнала: амплитудные; частотные и фазовые; непрерывные; импульсные.
По
По виду модуляции выходного сигнала: амплитудные; частотные и фазовые; непрерывные; импульсные.
По
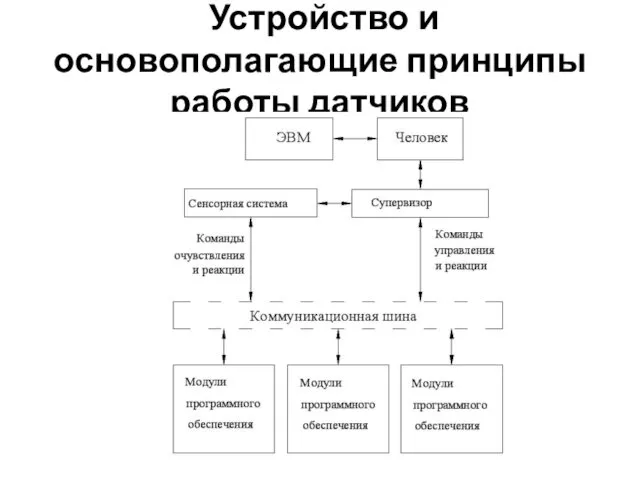
Устройство и основополагающие принципы работы датчиков
Устройство и основополагающие принципы работы датчиков
Детекторы положения и перемещения
Датчики положения — это, как правило, линейные устройства,
Детекторы положения и перемещения
Датчики положения — это, как правило, линейные устройства,

Датчики скорости и ускорения
Датчики скорости и ускорения
Тензодатчики
Тензодатчик — это гибкий резистивный чувствительный элемент, сопротивление которого пропорционально приложенному
Тензодатчики
Тензодатчик — это гибкий резистивный чувствительный элемент, сопротивление которого пропорционально приложенному
Датчики давления
В состав датчика входят следующие компоненты: пассивный кристалл оптического преобразователя
Датчики давления
В состав датчика входят следующие компоненты: пассивный кристалл оптического преобразователя
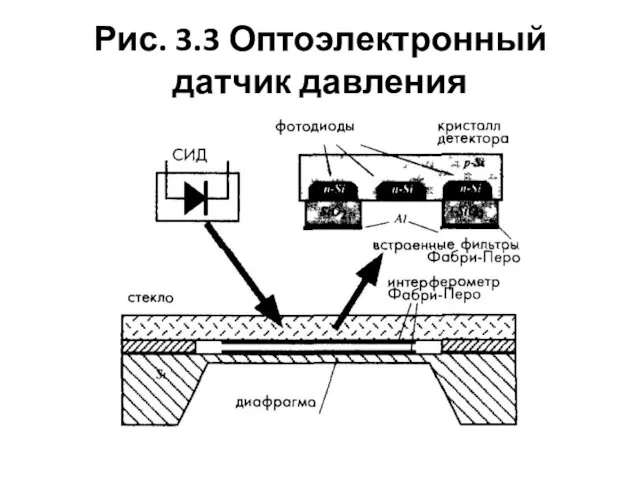
Рис. 3.3 Оптоэлектронный датчик давления
Рис. 3.3 Оптоэлектронный датчик давления

Акустические датчики
Акустические датчики
Световые датчики
Все детекторы световых излучений можно разделить на две группы: квантовые
Световые датчики
Все детекторы световых излучений можно разделить на две группы: квантовые
Датчики температуры
Самым распространённым детектором температуры в технических системах является термопара. Термопары
Датчики температуры
Самым распространённым детектором температуры в технических системах является термопара. Термопары
Применение датчиков в мехатронных системах
Типичная мехатронная система — тормозная система
Применение датчиков в мехатронных системах
Типичная мехатронная система — тормозная система
Датчики в промышленной технике измерений
В настоящее время широко применяются в
Датчики в промышленной технике измерений
В настоящее время широко применяются в

Рисунок 4.1 – Оптический датчик для управления процессом сварки
Рисунок 4.1 – Оптический датчик для управления процессом сварки
Датчики в робототехнике
Рисунок 4.2 – Датчик манипулятора робота (На основе D-поля):
Датчики в робототехнике
Рисунок 4.2 – Датчик манипулятора робота (На основе D-поля):

Рисунок 4.3 – Принцип действия датчика на основе измерения D-поля.
Рисунок 4.3 – Принцип действия датчика на основе измерения D-поля.
 Озон. Строение молекулы озона
Озон. Строение молекулы озона Приборы и устройства безопасности кранов
Приборы и устройства безопасности кранов Игры нашего поселка
Игры нашего поселка Лекарственные формы для инъекций
Лекарственные формы для инъекций Презентация Развитие личности ребенка в процессе приобщения к культурно-историческому наследию казачества
Презентация Развитие личности ребенка в процессе приобщения к культурно-историческому наследию казачества Чрезвычайные ситуации и их характеристика. Основные понятия и определения
Чрезвычайные ситуации и их характеристика. Основные понятия и определения Презентация Многоатомные спирты 10 класс
Презентация Многоатомные спирты 10 класс Презентация к празднику Прощай, АЗБУКА!
Презентация к празднику Прощай, АЗБУКА! Вплив війни на психічне здоров'я 2
Вплив війни на психічне здоров'я 2 Фестиваль народного творчества Донбасса
Фестиваль народного творчества Донбасса Из истории наших предков. Боги славян.
Из истории наших предков. Боги славян. Колесо оценки урока.
Колесо оценки урока. Беспроводные локальные сети
Беспроводные локальные сети Творчий проект Переборні задачі Паскаль
Творчий проект Переборні задачі Паскаль Презентация Зимушка-Зима.
Презентация Зимушка-Зима. Эти слайды описывают любовь к тебе
Эти слайды описывают любовь к тебе Николай Иванович Сладков
Николай Иванович Сладков Театральное искусство XVII - XVIII вв и его виды
Театральное искусство XVII - XVIII вв и его виды Аргументы Шепли в большом споре
Аргументы Шепли в большом споре Развитие произвольной памяти у детей старшего дошкольного возраста через дидактические игры
Развитие произвольной памяти у детей старшего дошкольного возраста через дидактические игры Формирование простых запросов к готовой базе данных. (9 класс)
Формирование простых запросов к готовой базе данных. (9 класс) ПРЕЗЕНТАЦИЯ по познавательному развитию ФЦКМ ДОРОГА ЖИЗНИ
ПРЕЗЕНТАЦИЯ по познавательному развитию ФЦКМ ДОРОГА ЖИЗНИ Первая медицинская помощь при кровотечении
Первая медицинская помощь при кровотечении Программа технологических расчетов трубопроводов
Программа технологических расчетов трубопроводов Внеурочная деятельность в младшей школе как важное условие реализации деятельности ФГОС нового поколения
Внеурочная деятельность в младшей школе как важное условие реализации деятельности ФГОС нового поколения  РАБОТЫ УЧАЩИХСЯ 7А класса по математике, информатике и ИКТ
РАБОТЫ УЧАЩИХСЯ 7А класса по математике, информатике и ИКТ Покормите птиц зимой!!!
Покормите птиц зимой!!! Гавриил Романович Державин (1743-1816). Творчество Г. Р. Державина
Гавриил Романович Державин (1743-1816). Творчество Г. Р. Державина