- Синтез линейных стационарных автоматических систем

Содержание
- 2. Синтез параллельного КУ методом ЛЧХ Передаточная функция разомкнутой АС W1(p)W2(p)=Wн(p) - передаточная функция неизменяемой части системы;
- 3. Достоинства параллельных КУ 1. Уменьшается зависимость качества корректируемой АС от изменения ее параметров (в нашем случае
- 4. Гибкой обратной связью (ГОС) называется параллельное КУ с передаточной функцией вида: Wк(p) = K1p+ K2p2+ K3
- 5. Синтез параллельного КУ методом ЛАХ Передаточная функция разомкнутой желаемой АС Wн(p)=W1(p)W2(p)W3(p) - передаточная функция неизменной части
- 6. Ось частот разбивается на два диапазона. На первом из них выполняется условие: тогда Wж(jω) ≈ Wн(jω)
- 7. Неравенство Lж(ω) ≤ Lн(ω) говорит о том, что Wж(p) выбирают из энергетических соображений таким образом, чтобы
- 8. Порядок синтеза АС с параллельным КУ : 1. Построить ЛАХ неизменной части системы Lн(ω), и Lж(ω).
- 9. Пример Для участков 1 и 3 выполняется равенство Lж(ω)=Lн(ω), следовательно, Lк(ω) -L2(ω). Построение ЛАХ КУ Lк(ω)
- 10. Система включает в себя: - сельсинный датчик рассогласования, состоящий из сельсин-датчика (ВС) и сельсин-приемника (ВЕ), работающих
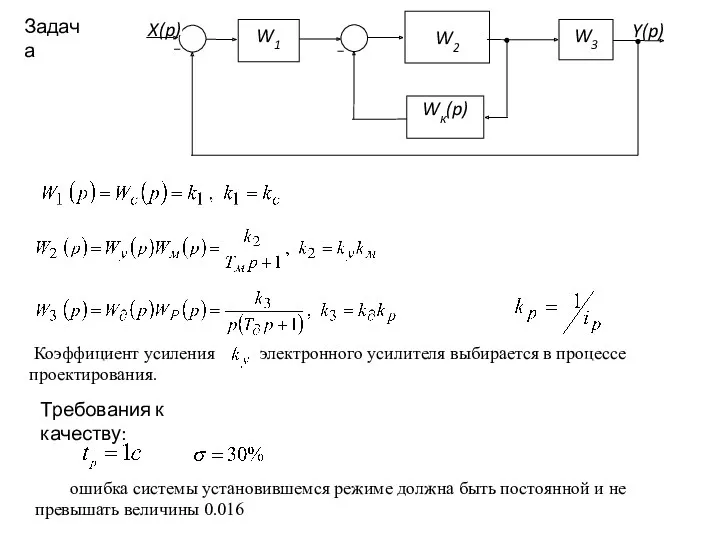
- 11. W2 Задача Требования к качеству: ошибка системы установившемся режиме должна быть постоянной и не превышать величины
- 14. Скачать презентацию
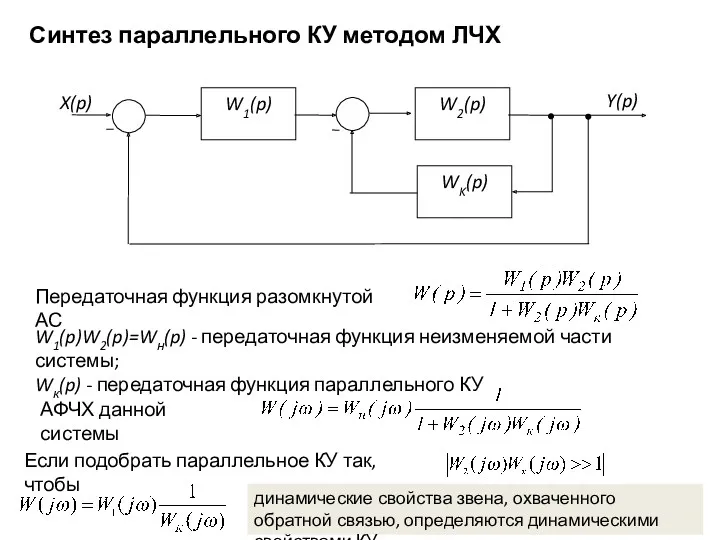
Синтез параллельного КУ методом ЛЧХ
Передаточная функция разомкнутой АС
W1(p)W2(p)=Wн(p) - передаточная функция
Синтез параллельного КУ методом ЛЧХ
Передаточная функция разомкнутой АС
W1(p)W2(p)=Wн(p) - передаточная функция
Достоинства параллельных КУ
1. Уменьшается зависимость качества корректируемой АС от изменения ее
Достоинства параллельных КУ
1. Уменьшается зависимость качества корректируемой АС от изменения ее
Гибкой обратной связью (ГОС) называется параллельное КУ с передаточной функцией вида:
Wк(p)
Гибкой обратной связью (ГОС) называется параллельное КУ с передаточной функцией вида:
Wк(p)
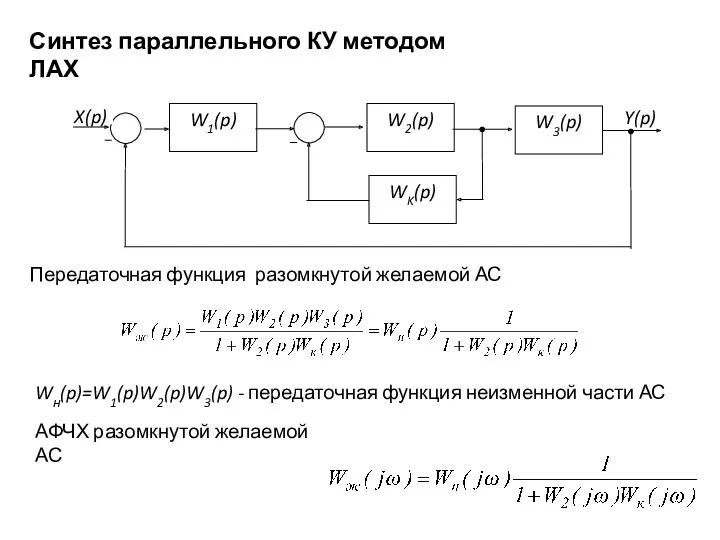
Синтез параллельного КУ методом ЛАХ
Передаточная функция разомкнутой желаемой АС
Wн(p)=W1(p)W2(p)W3(p) -
Синтез параллельного КУ методом ЛАХ
Передаточная функция разомкнутой желаемой АС
Wн(p)=W1(p)W2(p)W3(p) -
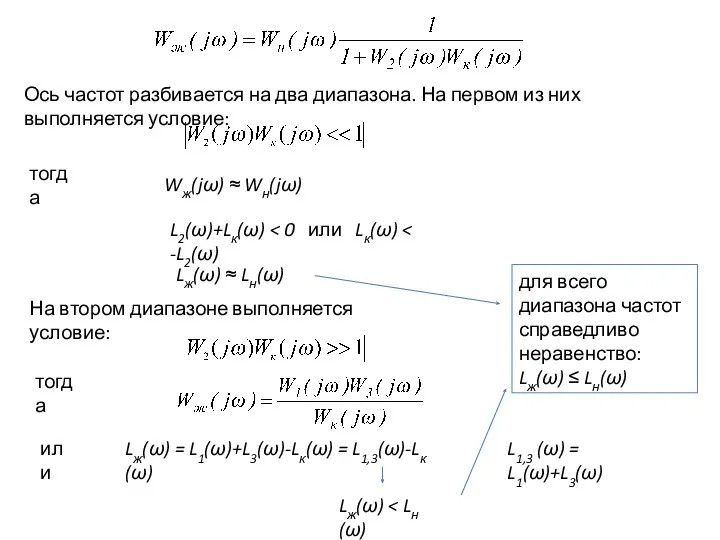
Ось частот разбивается на два диапазона. На первом из них выполняется
Ось частот разбивается на два диапазона. На первом из них выполняется
Неравенство Lж(ω) ≤ Lн(ω) говорит о том, что Wж(p) выбирают из
Неравенство Lж(ω) ≤ Lн(ω) говорит о том, что Wж(p) выбирают из
Порядок синтеза АС с параллельным КУ :
1. Построить ЛАХ неизменной части
Порядок синтеза АС с параллельным КУ :
1. Построить ЛАХ неизменной части
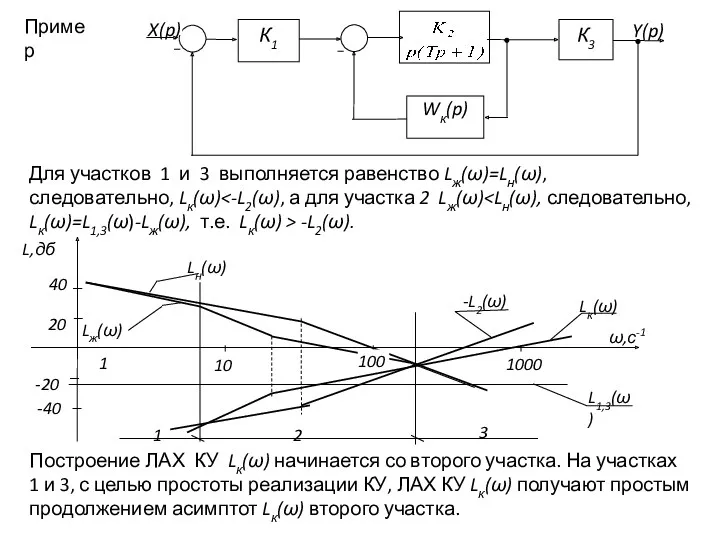
Пример
Для участков 1 и 3 выполняется равенство Lж(ω)=Lн(ω), следовательно, Lк(ω)<-L2(ω), а
Пример
Для участков 1 и 3 выполняется равенство Lж(ω)=Lн(ω), следовательно, Lк(ω)<-L2(ω), а
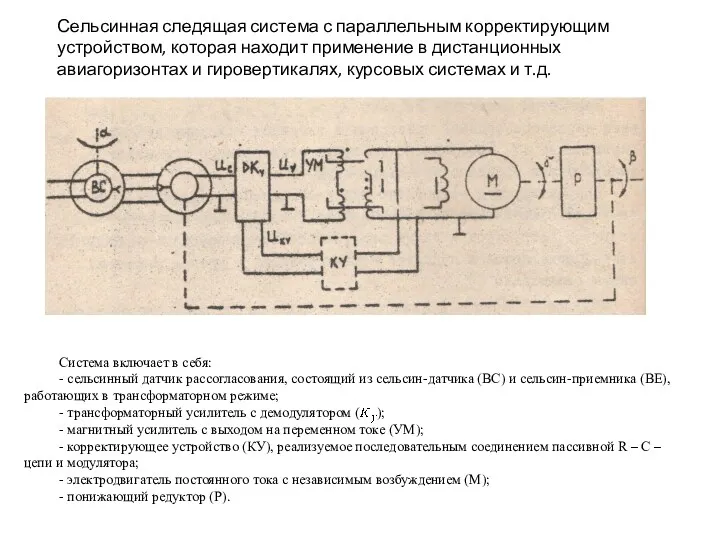
Система включает в себя:
- сельсинный датчик рассогласования, состоящий из сельсин-датчика (ВС)
Система включает в себя:
- сельсинный датчик рассогласования, состоящий из сельсин-датчика (ВС)
W2
Задача
Требования к качеству:
ошибка системы установившемся режиме должна быть постоянной и не
W2
Задача
Требования к качеству:
ошибка системы установившемся режиме должна быть постоянной и не
 How It Works - the global leader in innovative lifting solutions
How It Works - the global leader in innovative lifting solutions 300 лет Полтавской битве
300 лет Полтавской битве презентация Ферменты
презентация Ферменты Приключения Буратино
Приключения Буратино An intellectual contest for the 8-th formers What do you know about fashion in britain
An intellectual contest for the 8-th formers What do you know about fashion in britain Where i want to go
Where i want to go Асинхронный двигатель с частотным управлением как объект автоматического регулирования
Асинхронный двигатель с частотным управлением как объект автоматического регулирования Класифікація дестабілізуючих факторів
Класифікація дестабілізуючих факторів Поэтическая тетрадь. Проверочная работа
Поэтическая тетрадь. Проверочная работа математика
математика Моё электронное портфолио Диск Диск Диск
Моё электронное портфолио Диск Диск Диск Етика і деонтологія в професійній діяльності лікаря
Етика і деонтологія в професійній діяльності лікаря Дружба. Отличительные черты дружбы
Дружба. Отличительные черты дружбы Бизнес-стратегия: мифы и реальность
Бизнес-стратегия: мифы и реальность Готовность к школьному обучению
Готовность к школьному обучению Центр творчества студентов
Центр творчества студентов Recent Advances of High Power 1 µm Lasers
Recent Advances of High Power 1 µm Lasers Пророчий ярус у давніх українських іконостасах: Іконографія та поезія
Пророчий ярус у давніх українських іконостасах: Іконографія та поезія Жилой дом. Этапы строительства
Жилой дом. Этапы строительства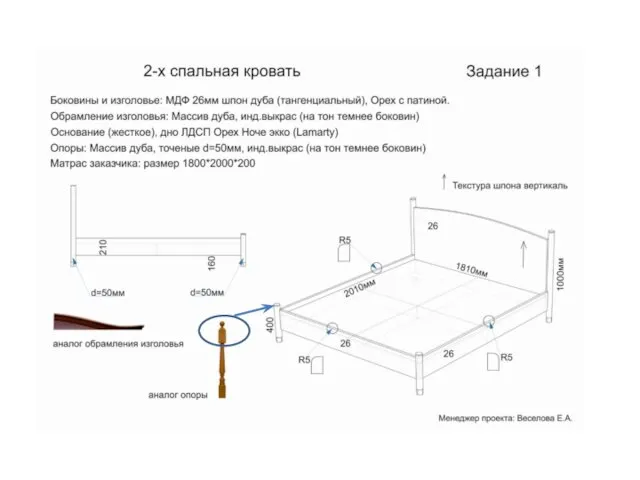 2-х спальная кровать
2-х спальная кровать ТРУД В ПРИРОДЕ В ДОУ
ТРУД В ПРИРОДЕ В ДОУ British Stereotypes
British Stereotypes Дорожный мастер
Дорожный мастер Восстание казахов Младшего жуза под предводительством Сырыма Датулы
Восстание казахов Младшего жуза под предводительством Сырыма Датулы Презентация Последняя семья Романовых
Презентация Последняя семья Романовых Ситуационный анализ рынка
Ситуационный анализ рынка Engetronics. Internet datacenter
Engetronics. Internet datacenter Біоорганічна хімія. Реакційна здатність біоорганічних сполук
Біоорганічна хімія. Реакційна здатність біоорганічних сполук