Системы электропривода. Принципы управления электроприводом. Разомкнутые системы электропривода. Лекция 1 презентация
- Системы электропривода. Принципы управления электроприводом. Разомкнутые системы электропривода. Лекция 1

Содержание
- 2. 39. Принципы управления электроприводом. Разомкнутые системы электропривода
- 3. Под управлением электроприводом понимается пуск его в работу, регулирование скорости, реверсирование, торможение, а также поддержание постоянства
- 4. Классификация систем управления
- 5. Если пуск электропривода, регулирование скорости и торможение осуществляются с помощью аппаратов ручного управления (рубильников, кнопочных или
- 6. Если же при управлении электроприводом человек участвует только в подаче начального управляющего воздействия, а остальные действия
- 7. Электропривод, в котором все операции по управлению осуществляют автоматические аппараты и устройства, а участие человека предусматривается
- 8. По количеству используемых для управления электроприводом сигналов (каналов информации) различают три вида систем управления: 1.по разомкнутому,
- 9. Системы электропривода, управляемые по разомкнутому циклу, называются разомкнутыми системами. Процесс управления по этой системе характеризуется отсутствием
- 10. Системы, управляемые по замкнутому циклу и называемые замкнутыми, одновременно используют два канала информации: задающей и о
- 11. Задающая информация сравнивается с информацией обратной связи, и в зависимости от значения и знака результирующего сигнала
- 12. В системах, управляемых по комбинированному циклу и называемых комбинированными, сочетаются две системы - замкнутая и разомкнутая,
- 13. По виду сигналов информации и управления (изменяющихся непрерывно или дискретно) АСУЭП разделяют на непрерывные (аналоговые) и
- 14. По виду усилительных элементов в управляющем устройстве различают системы электропривода: с серводвигательным управлением, где в качестве
- 15. По влиянию нагрузки на регулируемую величину различают три вида систем автоматического управления: статические, астатические, смешанные.
- 16. Статическими называются системы, у которых установившееся значение регулируемой величины зависит от нагрузки, а астатическими — системы,
- 17. Все разнообразие способов и систем управления электроприводами подчинено выполнению определенных функций. К основным из них можно
- 18. Кроме основных функций автоматические системы управления электроприводами выполняют и ряд вспомогательных. К ним относятся: 1.защита электродвигателей
- 19. Автоматизированный электропривод.
- 22. Процесс разгона электропривода со ступенчатым ускорением показан на рисунке, из которого видно, что выключение (или закорачивание)
- 23. Отсюда следует, что управление пуском может быть получено в функции: независимой выдержки времени; скорости; тока.
- 24. Кроме трех названных широко распространено управление электроприводом в функции пути, когда двигатель пускается или тормозится при
- 25. Управление торможением может производиться в функции времени, скорости (эдс, частоты) и тока с применением тех же
- 27. Скачать презентацию
39. Принципы управления электроприводом. Разомкнутые системы электропривода
39. Принципы управления электроприводом. Разомкнутые системы электропривода
Под управлением электроприводом понимается пуск его в работу, регулирование скорости, реверсирование,
Под управлением электроприводом понимается пуск его в работу, регулирование скорости, реверсирование,
Классификация систем управления
Классификация систем управления
Если пуск электропривода, регулирование скорости и торможение осуществляются с помощью аппаратов
Если пуск электропривода, регулирование скорости и торможение осуществляются с помощью аппаратов
Если же при управлении электроприводом человек участвует только в подаче начального
Если же при управлении электроприводом человек участвует только в подаче начального
Электропривод, в котором все операции по управлению осуществляют автоматические аппараты и
Электропривод, в котором все операции по управлению осуществляют автоматические аппараты и
По количеству используемых для управления электроприводом сигналов (каналов информации) различают три
По количеству используемых для управления электроприводом сигналов (каналов информации) различают три
Системы электропривода, управляемые по разомкнутому циклу, называются разомкнутыми системами. Процесс управления
Системы электропривода, управляемые по разомкнутому циклу, называются разомкнутыми системами. Процесс управления
Системы, управляемые по замкнутому циклу и называемые замкнутыми, одновременно используют два
Системы, управляемые по замкнутому циклу и называемые замкнутыми, одновременно используют два
Задающая информация сравнивается с информацией обратной связи, и в зависимости от
Задающая информация сравнивается с информацией обратной связи, и в зависимости от
В системах, управляемых по комбинированному циклу и называемых комбинированными, сочетаются две
В системах, управляемых по комбинированному циклу и называемых комбинированными, сочетаются две
По виду сигналов информации и управления (изменяющихся непрерывно или дискретно) АСУЭП
По виду сигналов информации и управления (изменяющихся непрерывно или дискретно) АСУЭП
По виду усилительных элементов в управляющем устройстве различают системы электропривода:
с серводвигательным
По виду усилительных элементов в управляющем устройстве различают системы электропривода:
с серводвигательным
По влиянию нагрузки на регулируемую величину различают три вида систем автоматического
По влиянию нагрузки на регулируемую величину различают три вида систем автоматического
Статическими называются системы, у которых установившееся значение регулируемой величины зависит от
Статическими называются системы, у которых установившееся значение регулируемой величины зависит от
Все разнообразие способов и систем управления электроприводами подчинено выполнению определенных функций.
Все разнообразие способов и систем управления электроприводами подчинено выполнению определенных функций.
Кроме основных функций автоматические системы управления электроприводами выполняют и ряд вспомогательных.
Кроме основных функций автоматические системы управления электроприводами выполняют и ряд вспомогательных.
Автоматизированный электропривод.
Автоматизированный электропривод.
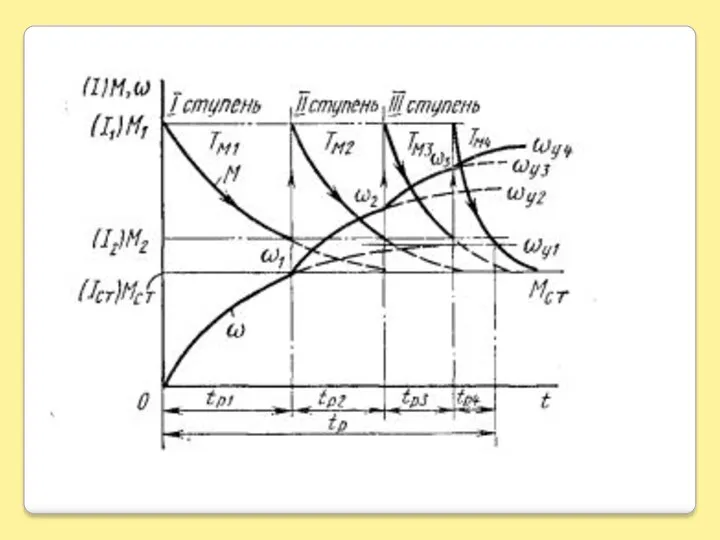
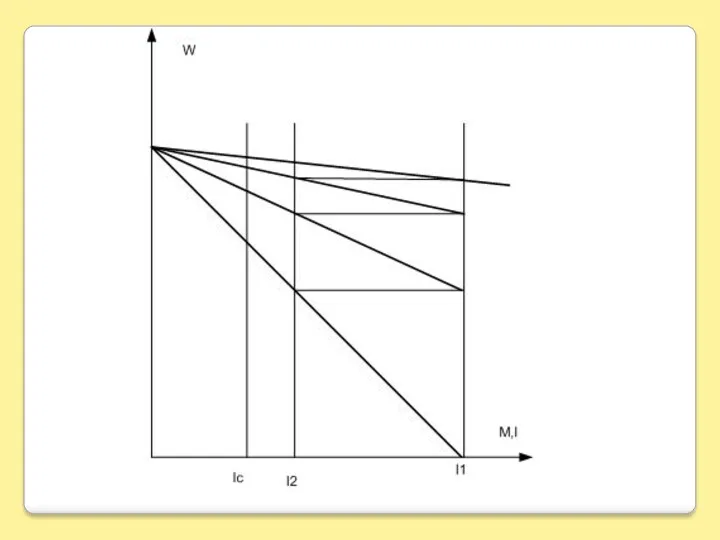
Процесс разгона электропривода со ступенчатым ускорением показан на рисунке, из которого
Процесс разгона электропривода со ступенчатым ускорением показан на рисунке, из которого
Отсюда следует, что управление пуском может быть получено в функции:
независимой
Отсюда следует, что управление пуском может быть получено в функции:
независимой
Кроме трех названных широко распространено управление электроприводом в функции пути, когда
Кроме трех названных широко распространено управление электроприводом в функции пути, когда
Управление торможением может производиться в функции времени, скорости (эдс, частоты) и
Управление торможением может производиться в функции времени, скорости (эдс, частоты) и
 Компетенция личностного самосовершенствования
Компетенция личностного самосовершенствования Разработка ресурсосберегающего способа производства топливно-плавильных материалов на основе техногенного сырья (Н3)
Разработка ресурсосберегающего способа производства топливно-плавильных материалов на основе техногенного сырья (Н3) Изготовление декоративного изделия 3D ручкой like
Изготовление декоративного изделия 3D ручкой like Готовая преза с триггерами
Готовая преза с триггерами урок по теме Карбоновые кислоты
урок по теме Карбоновые кислоты Операции Банка России на финансовом рынке. Лекция №4
Операции Банка России на финансовом рынке. Лекция №4 Общая краниология. Общие сведения о черепе
Общая краниология. Общие сведения о черепе Социальная психология личности
Социальная психология личности Роль физической культуры в сохранении здоровья
Роль физической культуры в сохранении здоровья Речь монологическая и диалогическая
Речь монологическая и диалогическая Холокост в литературе. То что забыть нельзя
Холокост в литературе. То что забыть нельзя Земля – уникальная планета (Урок-презентация).
Земля – уникальная планета (Урок-презентация). Мишка. Найди 3 отличия
Мишка. Найди 3 отличия Термодинамические процессы идеальных газов
Термодинамические процессы идеальных газов We're having a great time
We're having a great time Цветотерапия Попугаи
Цветотерапия Попугаи Фестиваль гражданского общества Добрые люди
Фестиваль гражданского общества Добрые люди ПрезентацияХлеб всему голова
ПрезентацияХлеб всему голова Родительское собрание для 1 класса.
Родительское собрание для 1 класса. Ауруханадан тыс пневманиямен ауыратын науқастарды емдеу кезіндегі пенициллин мен цефтриаксонның салыстырмалы
Ауруханадан тыс пневманиямен ауыратын науқастарды емдеу кезіндегі пенициллин мен цефтриаксонның салыстырмалы Обществознание и общественные науки
Обществознание и общественные науки Полиомиелит. Мероприятия в отношении больных полиомиелитом, острыми вялыми параличами
Полиомиелит. Мероприятия в отношении больных полиомиелитом, острыми вялыми параличами Угол. Измерение углов
Угол. Измерение углов Пищевая и легкая промышленность
Пищевая и легкая промышленность Настройка компьютера. Компьютерный вирус
Настройка компьютера. Компьютерный вирус Призентация творческого проекта Мягкая игрушка
Призентация творческого проекта Мягкая игрушка ОГАС 2.0. Программно-техническое решение системы (часть 2)
ОГАС 2.0. Программно-техническое решение системы (часть 2) Формирование стратегии и школы стратегического управления
Формирование стратегии и школы стратегического управления