- Способы преобразования ортогональных проекций

Содержание
- 2. Способы преобразования ортогональных проекций Способ замены плоскостей проекций Способ вращения
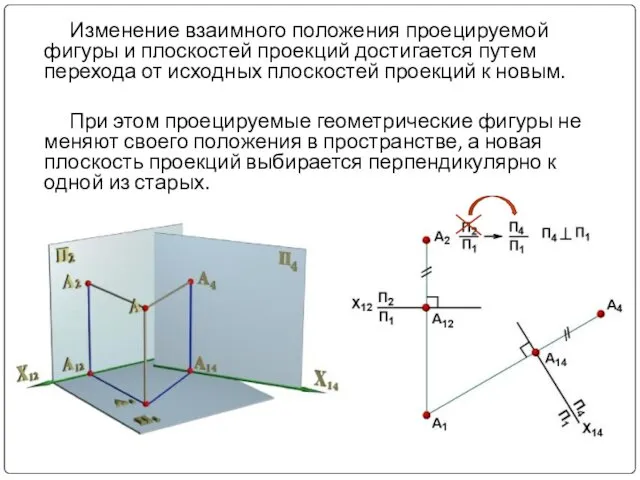
- 3. Изменение взаимного положения проецируемой фигуры и плоскостей проекций достигается путем перехода от исходных плоскостей проекций к
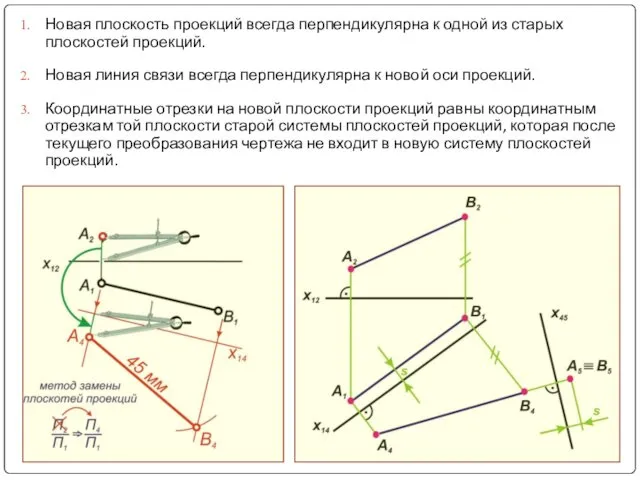
- 4. Новая плоскость проекций всегда перпендикулярна к одной из старых плоскостей проекций. Новая линия связи всегда перпендикулярна
- 5. Способ вращения
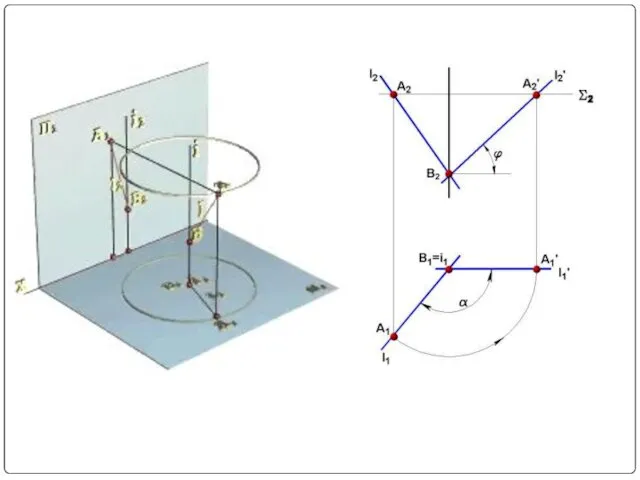
- 6. Сущность способа вращения заключается в том, что систему точек вращают вокруг некоторой прямой (оси вращения), обычно
- 8. Позиционные и метрические задачи
- 9. Позиционные задачи
- 10. Позиционные задачи - задачи на определение общих элементов различных геометрических фигур: взаимопринадлежность (например: взять точку на
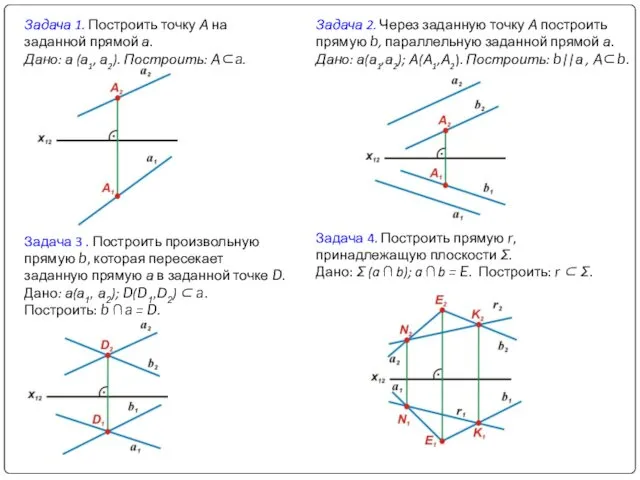
- 11. Задача 1. Построить точку А на заданной прямой а. Дано: а (а1, а2). Построить: A⊂a. Задача
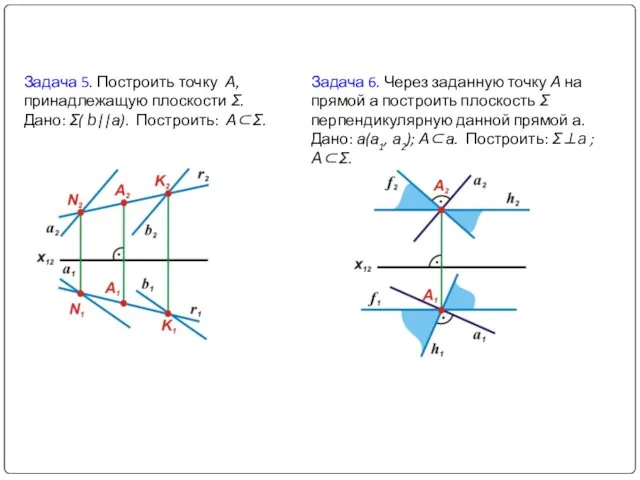
- 12. Задача 5. Построить точку А, принадлежащую плоскости Σ. Дано: Σ( b||а). Построить: А⊂Σ. Задача 6. Через
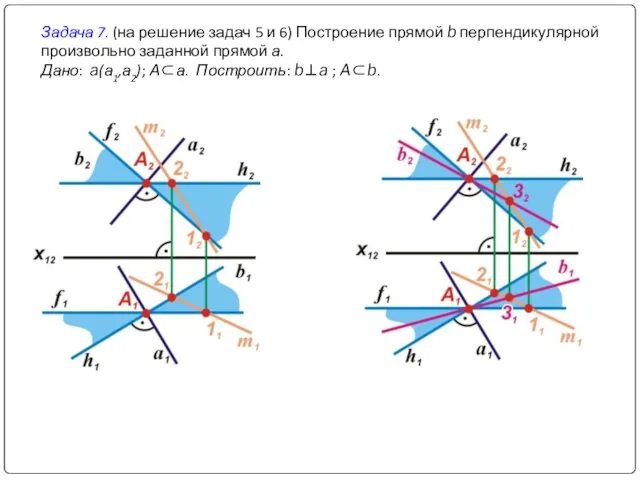
- 13. Задача 7. (на решение задач 5 и 6) Построение прямой b перпендикулярной произвольно заданной прямой а.
- 14. Задача 10. Построить точку пересечения плоскости общего положения Σ и произвольной прямой r. Определить взаимную видимость
- 15. Задача 11. Построить линию пересечения двух плоскостей общего положения. Дано: Δ (a∩b ); Σ(c||d). Построить: r
- 16. Метрические задачи
- 17. Метрические задачи - задачи на определение расстояний и углов ( т.е. на определение их натуральных величин).
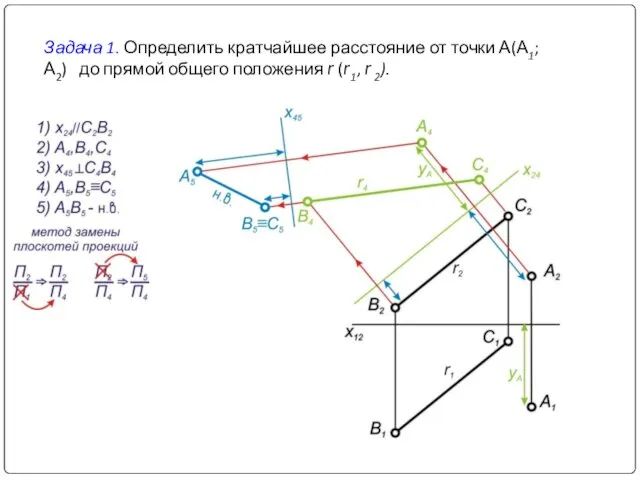
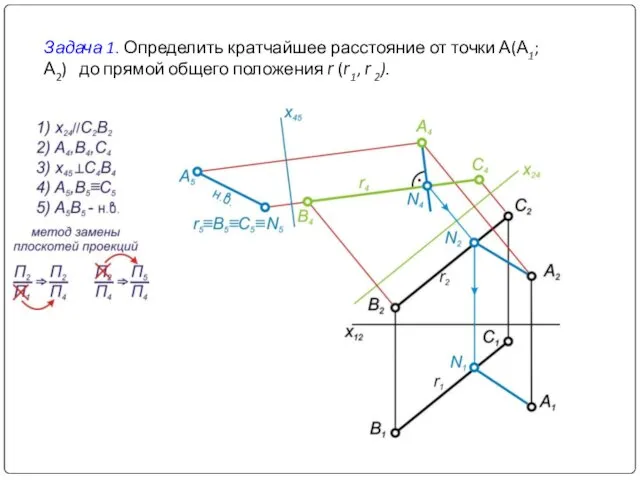
- 18. Задача 1. Определить кратчайшее расстояние от точки А(А1; А2) до прямой общего положения r (r1, r
- 19. Задача 1. Определить кратчайшее расстояние от точки А(А1; А2) до прямой общего положения r (r1, r
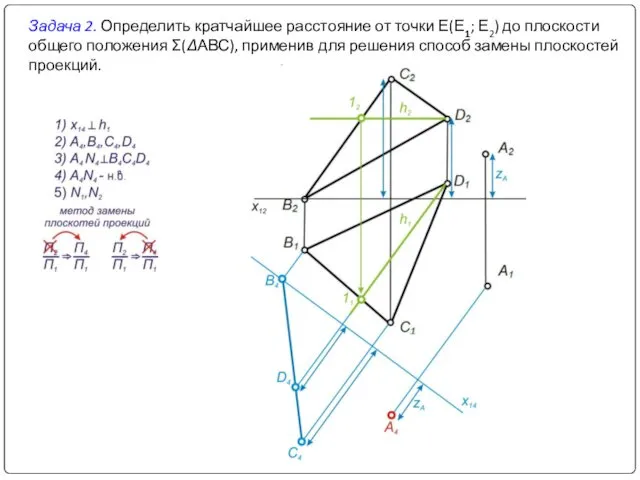
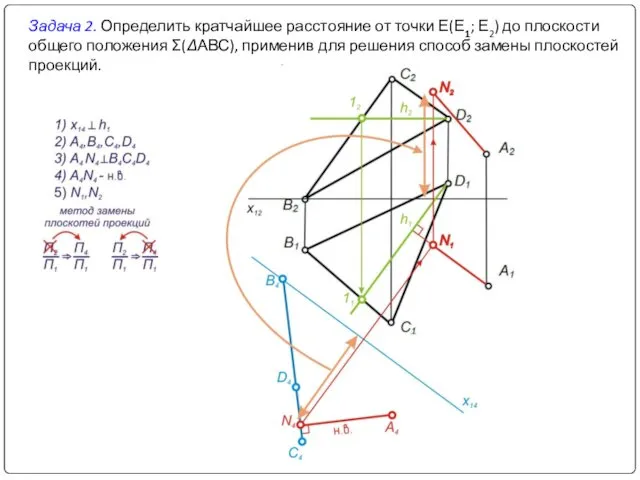
- 20. Задача 2. Определить кратчайшее расстояние от точки Е(Е1; Е2) до плоскости общего положения Σ(ΔАВС), применив для
- 21. Задача 2. Определить кратчайшее расстояние от точки Е(Е1; Е2) до плоскости общего положения Σ(ΔАВС), применив для
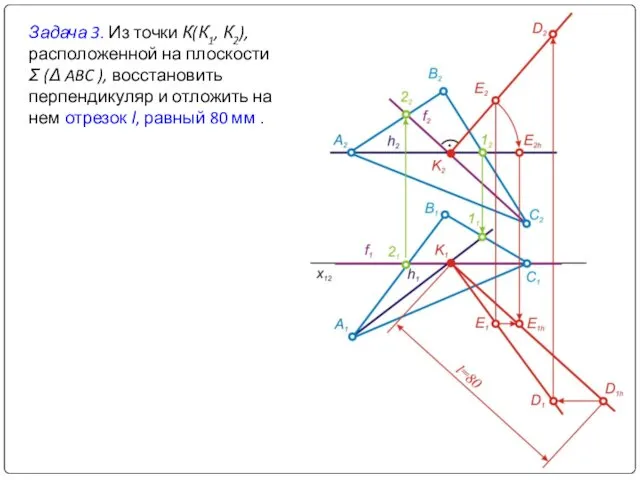
- 22. Задача 3. Из точки К(К1, К2), расположенной на плоскости Σ (Δ ABC ), восстановить перпендикуляр и
- 23. Задача 3. Из точки К(К1, К2), расположенной на плоскости Σ (Δ ABC ), восстановить перпендикуляр и
- 24. Вращение геометрической фигуры вокруг линии уровня (горизонтали или фронтали) производится с целью ее совмещения с плоскостью
- 25. Задача 4. Определить натуральную величину плоской фигуры (ΔАВС) способом вращения вокруг линии уровня. Проведем горизонталь h(h1,h2)
- 26. Новое положение С' вершины С определяется как точка пересечения прямой (В'К) с плоскостью Σ ', в
- 28. Скачать презентацию
Способы преобразования ортогональных проекций
Способ замены плоскостей проекций
Способ вращения
Способы преобразования ортогональных проекций
Способ замены плоскостей проекций
Способ вращения
Изменение взаимного положения проецируемой фигуры и плоскостей проекций достигается путем перехода
Изменение взаимного положения проецируемой фигуры и плоскостей проекций достигается путем перехода
Новая плоскость проекций всегда перпендикулярна к одной из старых плоскостей проекций.
Новая
Новая плоскость проекций всегда перпендикулярна к одной из старых плоскостей проекций.
Новая
Способ вращения
Способ вращения
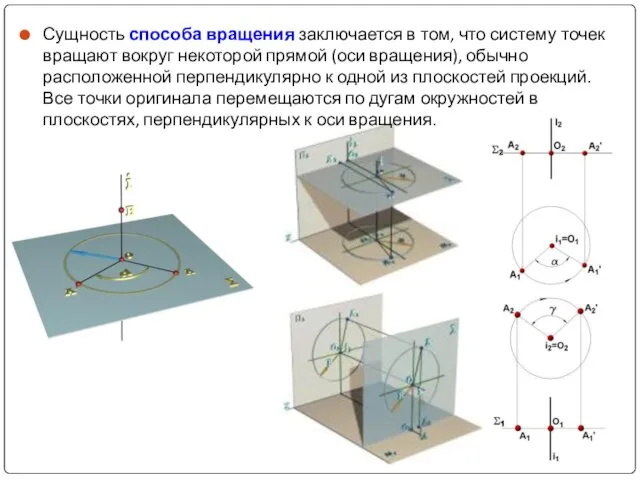
Сущность способа вращения заключается в том, что систему точек вращают вокруг
Сущность способа вращения заключается в том, что систему точек вращают вокруг
Позиционные и метрические задачи
Позиционные и метрические задачи
Позиционные задачи
Позиционные задачи
Позиционные задачи -
задачи на определение общих элементов различных геометрических фигур:
взаимопринадлежность
Позиционные задачи -
задачи на определение общих элементов различных геометрических фигур:
взаимопринадлежность
Задача 1. Построить точку А на заданной прямой а.
Дано: а (а1,
Задача 1. Построить точку А на заданной прямой а.
Дано: а (а1,
Задача 5. Построить точку А, принадлежащую плоскости Σ.
Дано: Σ( b||а). Построить:
Задача 5. Построить точку А, принадлежащую плоскости Σ.
Дано: Σ( b||а). Построить:
Задача 7. (на решение задач 5 и 6) Построение прямой b
Задача 7. (на решение задач 5 и 6) Построение прямой b
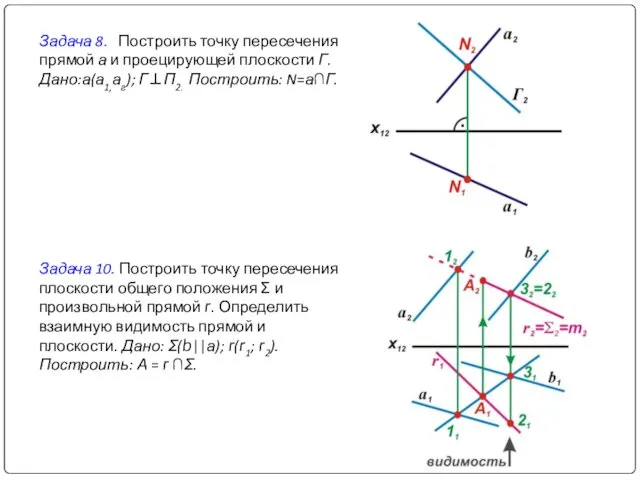
Задача 10. Построить точку пересечения плоскости общего положения Σ и произвольной
Задача 10. Построить точку пересечения плоскости общего положения Σ и произвольной
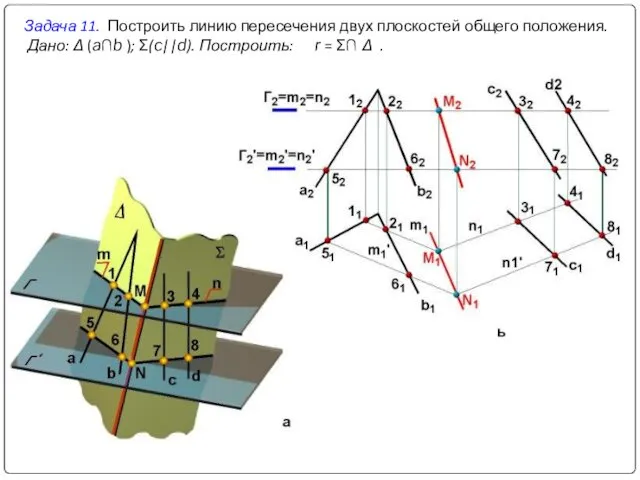
Задача 11. Построить линию пересечения двух плоскостей общего положения.
Дано: Δ (a∩b
Задача 11. Построить линию пересечения двух плоскостей общего положения.
Дано: Δ (a∩b
Метрические задачи
Метрические задачи
Метрические задачи -
задачи на определение расстояний и углов ( т.е. на
Метрические задачи -
задачи на определение расстояний и углов ( т.е. на
Задача 1. Определить кратчайшее расстояние от точки А(А1; А2) до прямой
Задача 1. Определить кратчайшее расстояние от точки А(А1; А2) до прямой
Задача 1. Определить кратчайшее расстояние от точки А(А1; А2) до прямой
Задача 1. Определить кратчайшее расстояние от точки А(А1; А2) до прямой
Задача 2. Определить кратчайшее расстояние от точки Е(Е1; Е2) до плоскости
Задача 2. Определить кратчайшее расстояние от точки Е(Е1; Е2) до плоскости
Задача 2. Определить кратчайшее расстояние от точки Е(Е1; Е2) до плоскости
Задача 2. Определить кратчайшее расстояние от точки Е(Е1; Е2) до плоскости
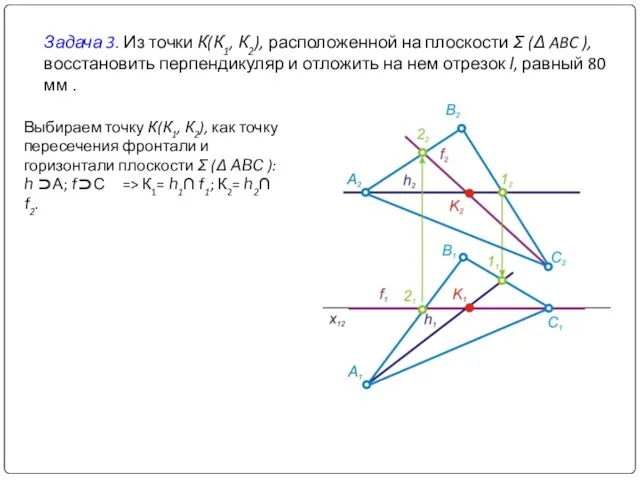
Задача 3. Из точки К(К1, К2), расположенной на плоскости Σ (Δ
Задача 3. Из точки К(К1, К2), расположенной на плоскости Σ (Δ
Задача 3. Из точки К(К1, К2), расположенной на плоскости Σ (Δ
Задача 3. Из точки К(К1, К2), расположенной на плоскости Σ (Δ
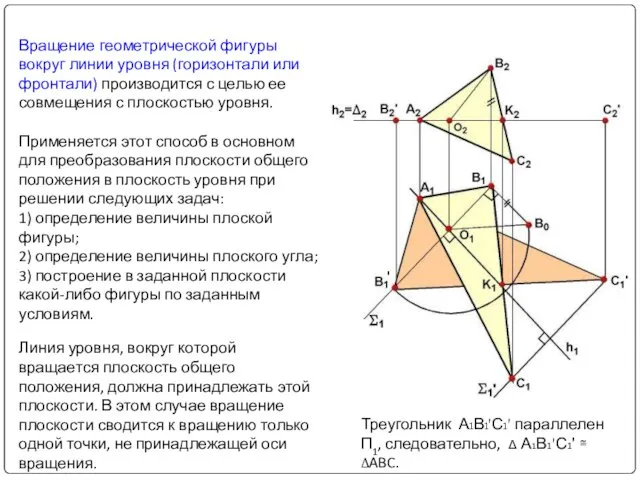
Вращение геометрической фигуры вокруг линии уровня (горизонтали или фронтали) производится с
Вращение геометрической фигуры вокруг линии уровня (горизонтали или фронтали) производится с
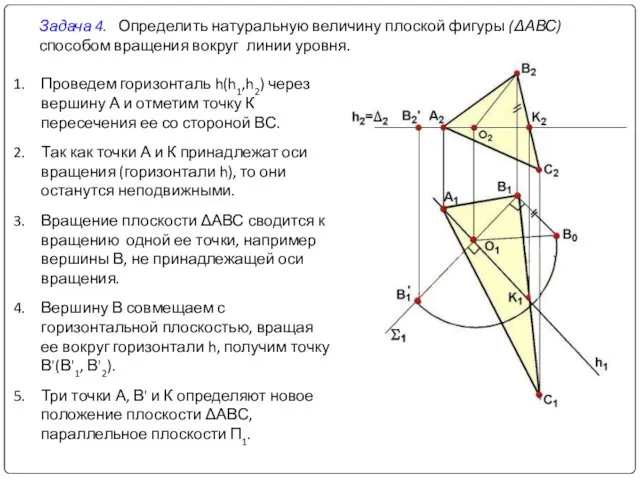
Задача 4. Определить натуральную величину плоской фигуры (ΔАВС) способом вращения вокруг
Задача 4. Определить натуральную величину плоской фигуры (ΔАВС) способом вращения вокруг
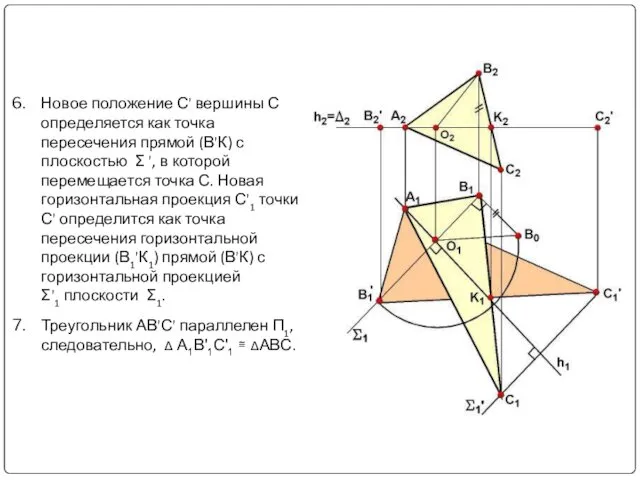
Новое положение С' вершины С определяется как точка пересечения прямой (В'К)
Новое положение С' вершины С определяется как точка пересечения прямой (В'К)
 Как функционально использовать лоджию. Лоджия как полезное пространство, а не кладовая
Как функционально использовать лоджию. Лоджия как полезное пространство, а не кладовая Должностные обязанности вожатого в детском оздоровительном лагере
Должностные обязанности вожатого в детском оздоровительном лагере Твердые и мягкие согласные звуки
Твердые и мягкие согласные звуки Специфика проведения деловых переговоров с зарубежными партнерами
Специфика проведения деловых переговоров с зарубежными партнерами Программирование на языке Паскаль. Процедуры
Программирование на языке Паскаль. Процедуры Понятие товарного рынка и конкуренции. Роль конкуренции в развитии экономики государства
Понятие товарного рынка и конкуренции. Роль конкуренции в развитии экономики государства Арктические пустыни. Климатические условия
Арктические пустыни. Климатические условия Презентация Школьные годы чудесные...
Презентация Школьные годы чудесные... Иудаизм, монотеизм
Иудаизм, монотеизм Разновидности нивелиров и нивелирных реек
Разновидности нивелиров и нивелирных реек Гидравлический расчет котла
Гидравлический расчет котла Презентация Замки Луары
Презентация Замки Луары Проект Что в имени тебе моём
Проект Что в имени тебе моём Шаблон коммерческого предложения по абонентскому юридическому обслуживанию
Шаблон коммерческого предложения по абонентскому юридическому обслуживанию Методическая разработка урока по ОРКСЭ: модуль Основы православной культуры по теме Подвиг
Методическая разработка урока по ОРКСЭ: модуль Основы православной культуры по теме Подвиг Физические основы гемодинамики. Вязкость
Физические основы гемодинамики. Вязкость ПТЭ, инструкции и безопасность движения
ПТЭ, инструкции и безопасность движения Развитие навыков связной речи первоклассников с речевыми недостатками в процессе организации творческой игровой деятельности
Развитие навыков связной речи первоклассников с речевыми недостатками в процессе организации творческой игровой деятельности Веточка мимозы
Веточка мимозы От Коперника до наших дней
От Коперника до наших дней Автоматизация звука С. Игра Что изменилось?
Автоматизация звука С. Игра Что изменилось? ПРЕЗЕНТАЦИЯ для 11АБ КОНУС
ПРЕЗЕНТАЦИЯ для 11АБ КОНУС Конспект урока географии по теме:Численность населения Земли. расы. 6 класс
Конспект урока географии по теме:Численность населения Земли. расы. 6 класс Зима будет Снежной с линией Winter Care
Зима будет Снежной с линией Winter Care Тооо
Тооо Молекулярные массы, плотности, молярные объёмы при нормальных условиях и газовые постоянные важнейших газов
Молекулярные массы, плотности, молярные объёмы при нормальных условиях и газовые постоянные важнейших газов Mems its methods and applications
Mems its methods and applications Культура стран Европы в XVI-XVII веках
Культура стран Европы в XVI-XVII веках