- Средства тепловой диагностики, обработка и представление результатов измерений

Содержание
- 2. Понятие об измерении 1 Требования к точности измерения основных параметров двигателя Основные задачи измерения: 1) определение
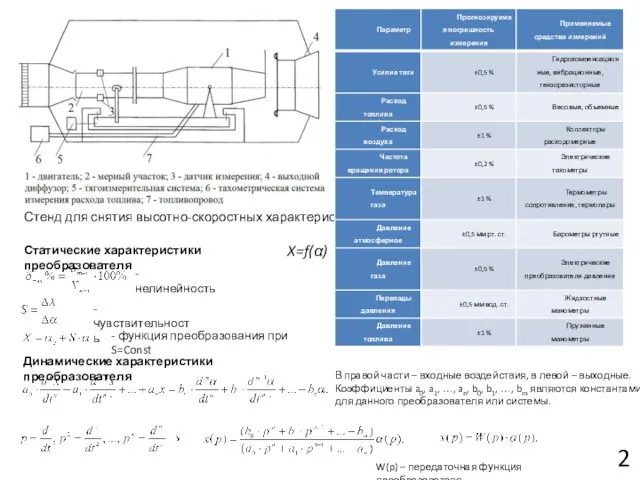
- 3. 2 Стенд для снятия высотно-скоростных характеристик Статические характеристики преобразователя X=f(α) - нелинейность - чувствительность - функция
- 4. Погрешности измерений 3 - абсолютная погрешность - относительная погрешность где Ai – показание прибора; Ci –
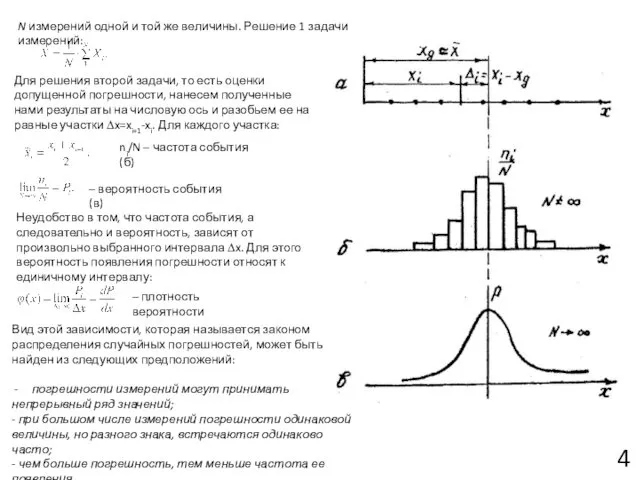
- 5. 4 N измерений одной и той же величины. Решение 1 задачи измерений: Для решения второй задачи,
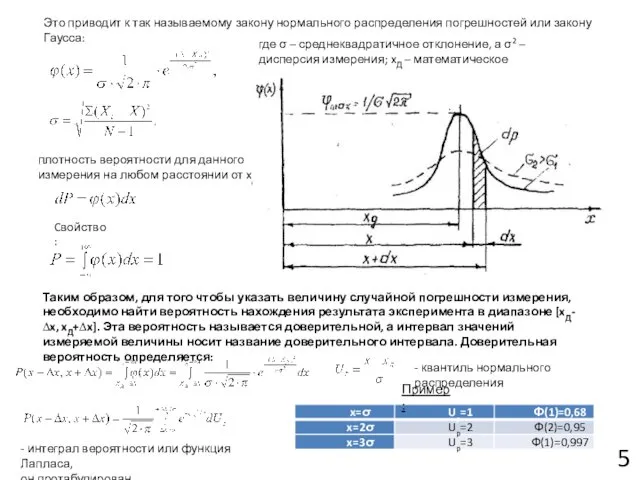
- 6. 5 Это приводит к так называемому закону нормального распределения погрешностей или закону Гаусса: где σ –
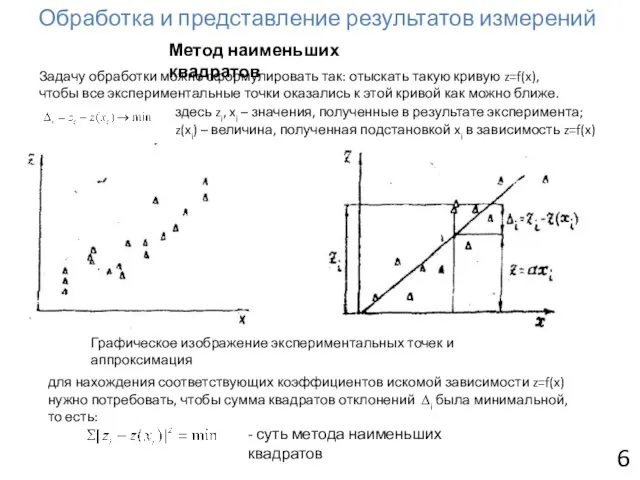
- 7. 6 Обработка и представление результатов измерений Метод наименьших квадратов Задачу обработки можно сформулировать так: отыскать такую
- 8. Пусть z=ax, тогда На практике обычно ограничиваются многочленом четвертой степени: 7
- 9. 8 В случае Пример:
- 10. Методы и средства измерения температуры Средства измерения температуры термопары пирометры излучения терморезисторы тепловизоры и пр. термометры
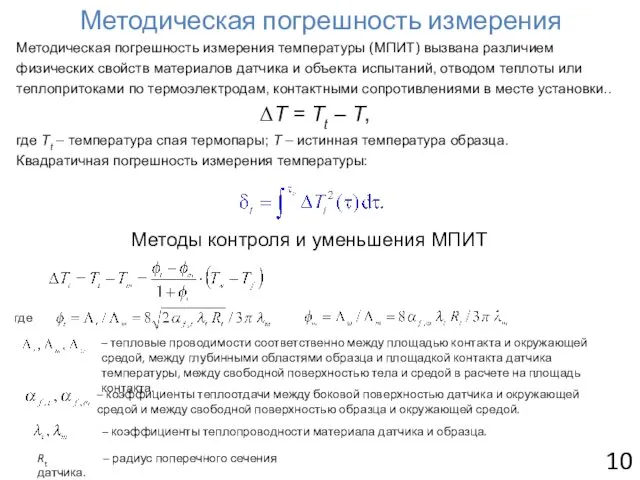
- 11. Методическая погрешность измерения Методическая погрешность измерения температуры (МПИТ) вызвана различием физических свойств материалов датчика и объекта
- 12. б) Увеличение поверхности соприкосновения датчика с образцом. Заключается в соединении спая с хорошо проводящим тепло металлическим
- 13. а) Простейший датчик. Математическая модель термически тонкого тела: где C, A, e – соответственно объемная теплоемкость,
- 14. б) Датчик типа Гордона. 13 Принцип действия – плотность теплового потока пропорциональна перепаду температуры между центром
- 16. Скачать презентацию

Понятие об измерении
1
Требования к точности измерения основных параметров двигателя
Основные задачи измерения:
Понятие об измерении
1
Требования к точности измерения основных параметров двигателя
Основные задачи измерения:
2
Стенд для снятия высотно-скоростных характеристик
Статические характеристики преобразователя
X=f(α)
- нелинейность
- чувствительность
- функция преобразования
2
Стенд для снятия высотно-скоростных характеристик
Статические характеристики преобразователя
X=f(α)
- нелинейность
- чувствительность
- функция преобразования
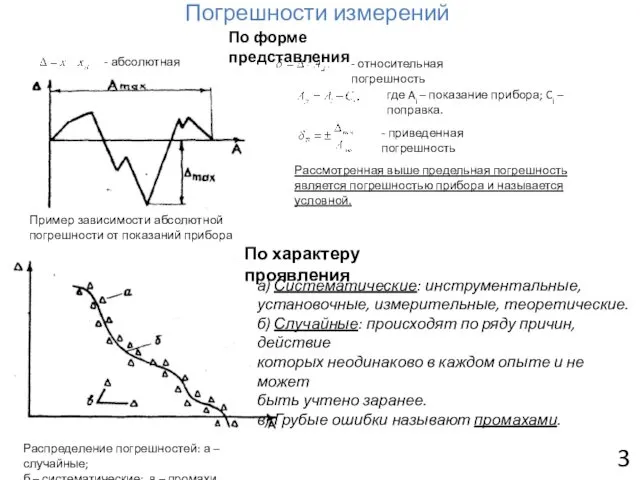
Погрешности измерений
3
- абсолютная погрешность
- относительная погрешность
где Ai – показание прибора; Ci
Погрешности измерений
3
- абсолютная погрешность
- относительная погрешность
где Ai – показание прибора; Ci
4
N измерений одной и той же величины. Решение 1 задачи измерений:
4
N измерений одной и той же величины. Решение 1 задачи измерений:
5
Это приводит к так называемому закону нормального распределения погрешностей или закону
5
Это приводит к так называемому закону нормального распределения погрешностей или закону
6
Обработка и представление результатов измерений
Метод наименьших квадратов
Задачу обработки можно сформулировать так:
6
Обработка и представление результатов измерений
Метод наименьших квадратов
Задачу обработки можно сформулировать так:
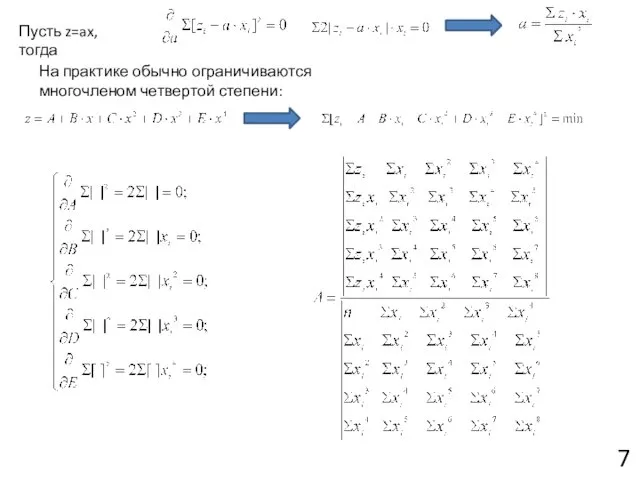
Пусть z=ax, тогда
На практике обычно ограничиваются многочленом четвертой степени:
7
Пусть z=ax, тогда
На практике обычно ограничиваются многочленом четвертой степени:
7
8
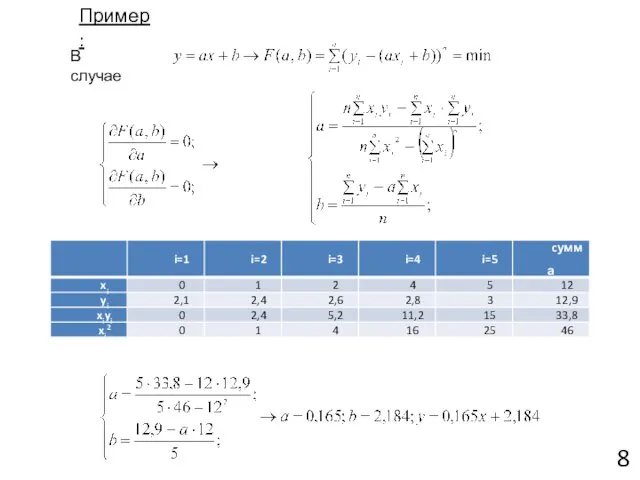
В случае
Пример:
8
В случае
Пример:
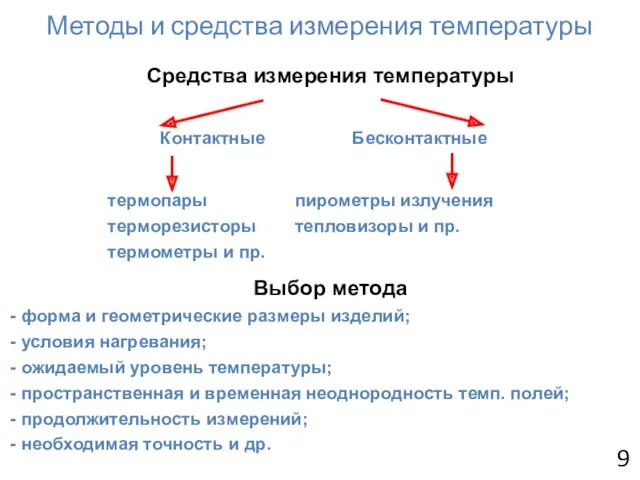
Методы и средства измерения температуры
Средства измерения температуры
термопары пирометры излучения
терморезисторы тепловизоры
Методы и средства измерения температуры
Средства измерения температуры
термопары пирометры излучения
терморезисторы тепловизоры
Методическая погрешность измерения
Методическая погрешность измерения температуры (МПИТ) вызвана различием физических свойств
Методическая погрешность измерения
Методическая погрешность измерения температуры (МПИТ) вызвана различием физических свойств
б) Увеличение поверхности соприкосновения датчика с образцом.
Заключается в соединении спая с
б) Увеличение поверхности соприкосновения датчика с образцом.
Заключается в соединении спая с
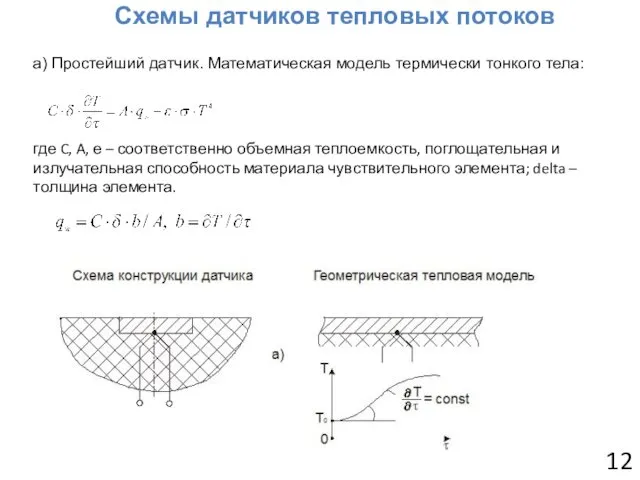
а) Простейший датчик. Математическая модель термически тонкого тела:
где C, A, e
а) Простейший датчик. Математическая модель термически тонкого тела:
где C, A, e
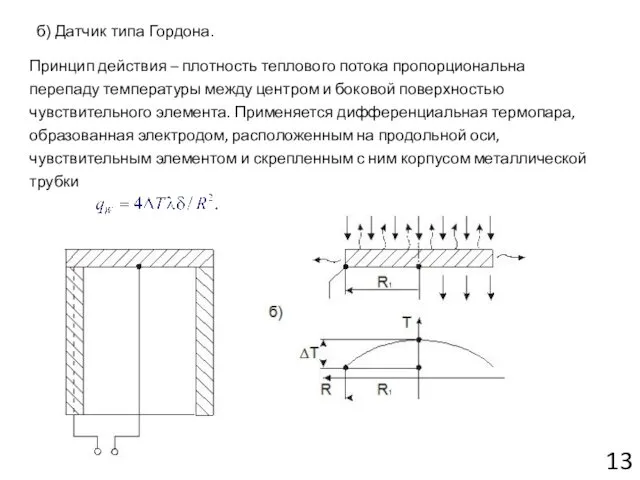
б) Датчик типа Гордона.
13
Принцип действия – плотность теплового потока пропорциональна перепаду
б) Датчик типа Гордона.
13
Принцип действия – плотность теплового потока пропорциональна перепаду
 Геодезия
Геодезия Детский проект: Шоколад - вред или польза?
Детский проект: Шоколад - вред или польза? Ecology is one of the most important sciences nowadays
Ecology is one of the most important sciences nowadays Творческий проект по изготовлению плечевого изделия с цельнокроеным рукавом
Творческий проект по изготовлению плечевого изделия с цельнокроеным рукавом Экзистенциализм
Экзистенциализм презентация ГИМНАСТИКА МОЗГА
презентация ГИМНАСТИКА МОЗГА Линейная функция и ее график. Составление выражения
Линейная функция и ее график. Составление выражения 1С Парфюм Логистик
1С Парфюм Логистик Искусственный интеллект 3008
Искусственный интеллект 3008 Александр I. Внутренняя политика (кратко)
Александр I. Внутренняя политика (кратко) Что такое погода. 2 класс
Что такое погода. 2 класс Стальная арматура
Стальная арматура Презентация Битва под Москвой
Презентация Битва под Москвой Артикуляционная гимнастика
Артикуляционная гимнастика Новообразования. Классификация опухолей органа зрения
Новообразования. Классификация опухолей органа зрения Строительство школ и детсадов в Пермском крае
Строительство школ и детсадов в Пермском крае Организация работы отделения физиотерапии и восстановительного лечения
Организация работы отделения физиотерапии и восстановительного лечения Климат Северной Америки
Климат Северной Америки Инжиниринг и реинжиниринг
Инжиниринг и реинжиниринг May Employee Meeting
May Employee Meeting Общественное движение в годы правления Николая I. 8 класс
Общественное движение в годы правления Николая I. 8 класс Судьбы оборванная нить. Ко дню памяти жертв ДТП
Судьбы оборванная нить. Ко дню памяти жертв ДТП Мой личный сайт
Мой личный сайт Дидактическая компьютерная игра Путешествие в страну дорожных знаков
Дидактическая компьютерная игра Путешествие в страну дорожных знаков Маркетинговые исследования и ситуационный анализ
Маркетинговые исследования и ситуационный анализ ВКР: Проблемы стимулирования деятельности государственных служащих
ВКР: Проблемы стимулирования деятельности государственных служащих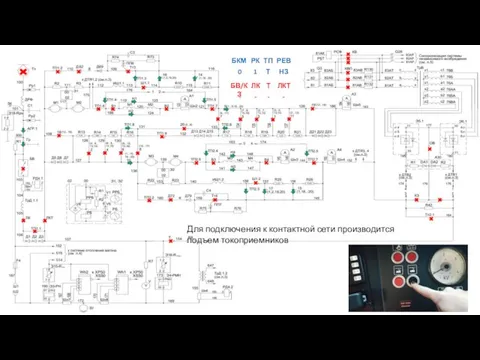 ЭП2Д. Схема электрическая силовая
ЭП2Д. Схема электрическая силовая Предпосылки петровских преобразований
Предпосылки петровских преобразований