- Структура процессора. Микропрограммное управление. (Лекция 2)

Содержание
- 2. 2.1 Микропрограммный автомат Операционное устройство (ОУ) — устройство, в котором выполняются операции. Оно включает в качестве
- 3. Процесс выполнения программы в ВМ представляет собой последовательность машинных циклов. Детализируем основные целевые функции, реализуемые устройством
- 4. Первым этапом в машинном цикле является выборка команды из памяти (этап ВК). За выборкой команды следует
- 5. Каждое элементарное действие, выполняемое в одном из узлов ОУ в течение одного тактового периода, называется микрооперацией.
- 6. Для выполнения своих функций УУ должно иметь входы, позволяющие определить состояние управляемой системы, и выходы, через
- 7. В зависимости от способа формирования микрокоманд различают микропрограммные автоматы: • с жесткой или аппаратной логикой; •
- 8. 2.2 Модель устройства управления процессора
- 9. 2.2 Модель устройства управления процессора
- 10. 2.2 Модель устройства управления процессора
- 11. 2.3 Программная модель процессора i8086 Рисунок 2.3 – Модель устройства управления
- 12. 2.3 Программная модель процессора i8086 IP — регистр-счетчик текущего адреса программы (программный cчетчик). После выборки из
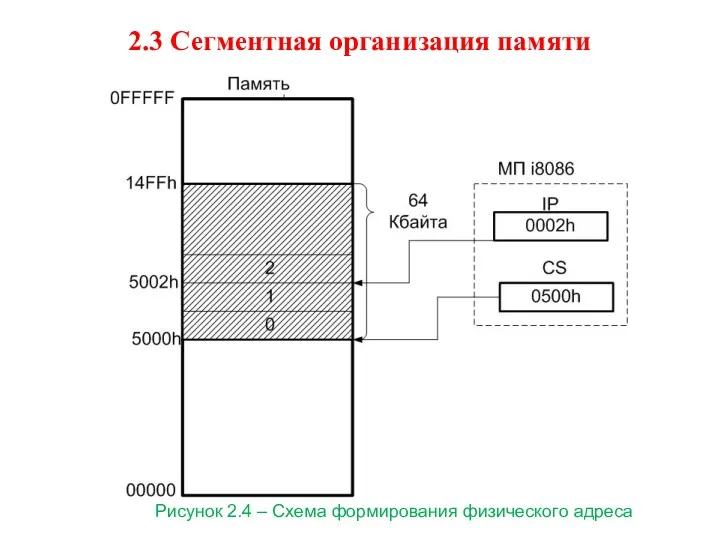
- 13. 2.3 Сегментная организация памяти Рисунок 2.4 – Схема формирования физического адреса
- 14. Формула формирования физического адреса в МП i8086
- 15. 2.4 Стек Стек является безадресной памятью. В большинстве современных процессоров реализован аппаратный стек, который представляет из
- 16. 2.4 Стек Стек относится к памяти типа LIFO (Last Input First Output, последним пришел - первым
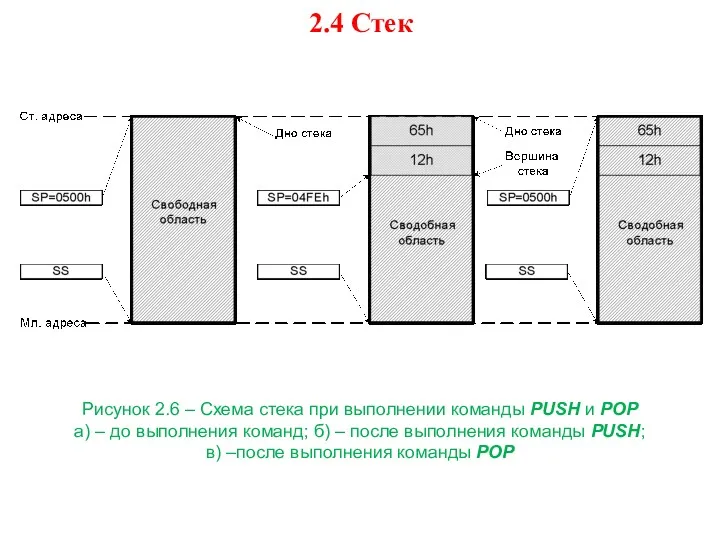
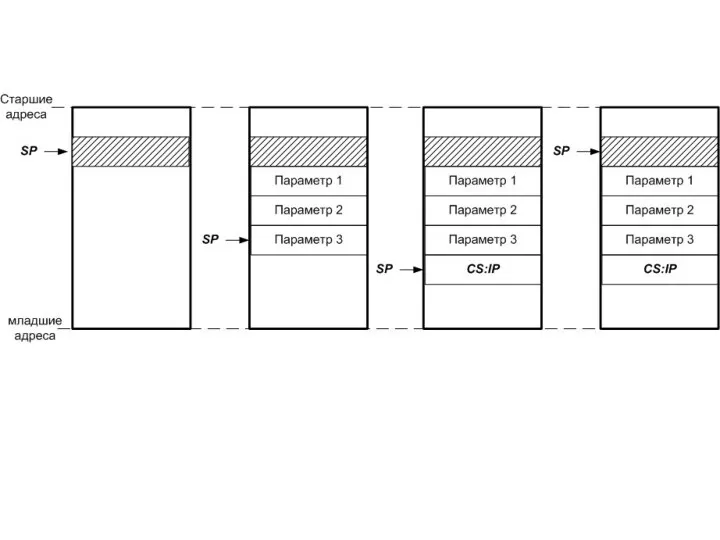
- 17. 2.4 Стек Рисунок 2.6 – Схема стека при выполнении команды PUSH и POP а) – до
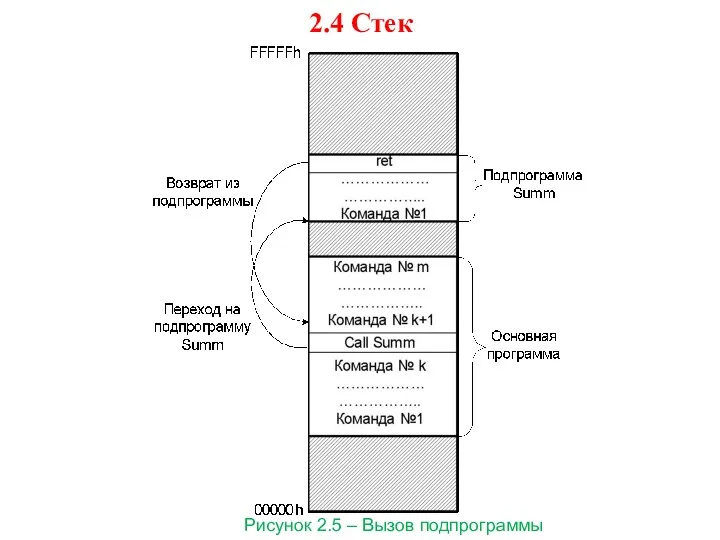
- 18. 2.4 Стек Рисунок 2.5 – Вызов подпрограммы
- 21. Скачать презентацию
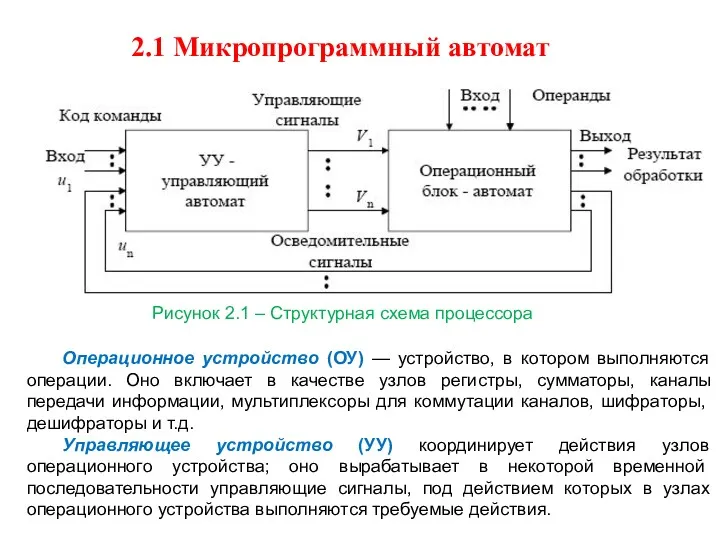
2.1 Микропрограммный автомат
Операционное устройство (ОУ) — устройство, в котором выполняются операции.
2.1 Микропрограммный автомат
Операционное устройство (ОУ) — устройство, в котором выполняются операции.
Процесс выполнения программы в ВМ представляет собой последовательность машинных циклов.
Детализируем
Процесс выполнения программы в ВМ представляет собой последовательность машинных циклов.
Детализируем
Первым этапом в машинном цикле является выборка команды из памяти (этап
Первым этапом в машинном цикле является выборка команды из памяти (этап
Каждое элементарное действие, выполняемое в одном из узлов ОУ в течение
Каждое элементарное действие, выполняемое в одном из узлов ОУ в течение
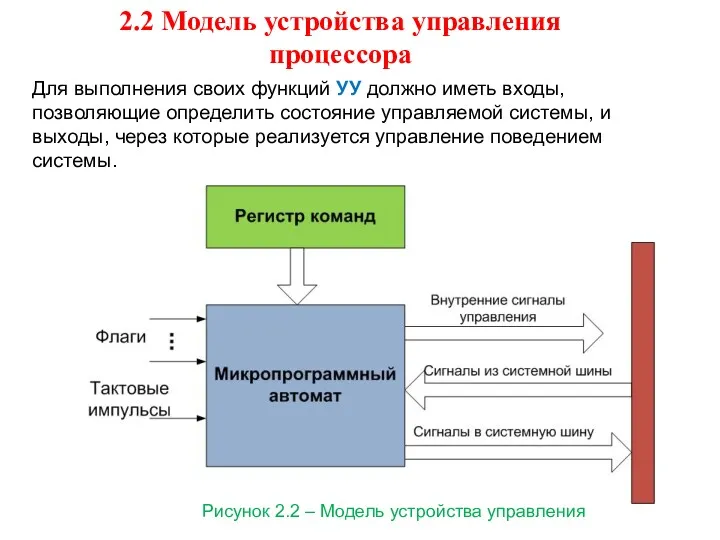
Для выполнения своих функций УУ должно иметь входы, позволяющие определить состояние
Для выполнения своих функций УУ должно иметь входы, позволяющие определить состояние
В зависимости от способа формирования микрокоманд различают микропрограммные автоматы:
• с
В зависимости от способа формирования микрокоманд различают микропрограммные автоматы:
• с

2.2 Модель устройства управления процессора
2.2 Модель устройства управления процессора

2.2 Модель устройства управления процессора
2.2 Модель устройства управления процессора

2.2 Модель устройства управления процессора
2.2 Модель устройства управления процессора

2.3 Программная модель процессора i8086
Рисунок 2.3 – Модель устройства управления
2.3 Программная модель процессора i8086
Рисунок 2.3 – Модель устройства управления
2.3 Программная модель процессора i8086
IP — регистр-счетчик текущего адреса программы (программный
2.3 Программная модель процессора i8086
IP — регистр-счетчик текущего адреса программы (программный
2.3 Сегментная организация памяти
Рисунок 2.4 – Схема формирования физического адреса
2.3 Сегментная организация памяти
Рисунок 2.4 – Схема формирования физического адреса
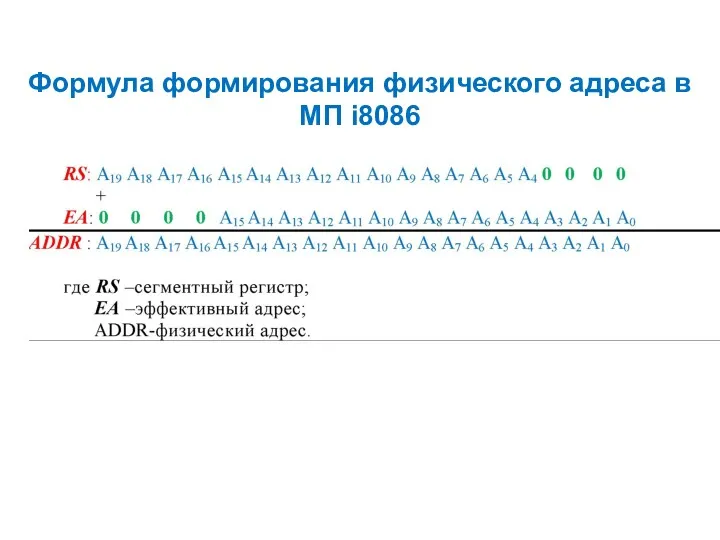
Формула формирования физического адреса в МП i8086
Формула формирования физического адреса в МП i8086
2.4 Стек
Стек является безадресной памятью. В большинстве современных процессоров реализован аппаратный
2.4 Стек
Стек является безадресной памятью. В большинстве современных процессоров реализован аппаратный
2.4 Стек
Стек относится к памяти типа LIFO (Last Input First Output,
2.4 Стек
Стек относится к памяти типа LIFO (Last Input First Output,
2.4 Стек
Рисунок 2.6 – Схема стека при выполнении команды PUSH и
2.4 Стек
Рисунок 2.6 – Схема стека при выполнении команды PUSH и
2.4 Стек
Рисунок 2.5 – Вызов подпрограммы
2.4 Стек
Рисунок 2.5 – Вызов подпрограммы
 Без потерь и повреждений! (для курьеров, менеджеров клиентского сервиса и отдела продаж)
Без потерь и повреждений! (для курьеров, менеджеров клиентского сервиса и отдела продаж) Обезболивание в акушерстве
Обезболивание в акушерстве Виртуальная выставка. 205 лет М. Ю. Лермонтову
Виртуальная выставка. 205 лет М. Ю. Лермонтову Формирование навыка чтения и письма
Формирование навыка чтения и письма Применение различных способов для разложения на множители
Применение различных способов для разложения на множители Религия как одна из форм культуры
Религия как одна из форм культуры Выход проекта Я и моя Воркута
Выход проекта Я и моя Воркута Пословицы и поговорки. Народные приметы. Осенние загадки. Инсценирование произведения Н. Сладкова Осень
Пословицы и поговорки. Народные приметы. Осенние загадки. Инсценирование произведения Н. Сладкова Осень Тригонометрические выражения
Тригонометрические выражения День занимательных уроков
День занимательных уроков Презентация Зима
Презентация Зима Окружность (геометрия 7 класс)
Окружность (геометрия 7 класс) Проектирование локальной вычислительной сети магазина строительных инструментов
Проектирование локальной вычислительной сети магазина строительных инструментов Методический семинар
Методический семинар Влияние сюжетно-ролевых, подвижных, театрализованных, дидактических игр на развитие компетентностей детей дошкольного возраста
Влияние сюжетно-ролевых, подвижных, театрализованных, дидактических игр на развитие компетентностей детей дошкольного возраста Наполеон и Кутузов в романе Война и мир Л.Н. Толстого
Наполеон и Кутузов в романе Война и мир Л.Н. Толстого Фрезерные приспособления
Фрезерные приспособления Sacroma of the leg
Sacroma of the leg Теория привязанности через призму Ислама
Теория привязанности через призму Ислама Развитие навыков сотрудничества в совместной продуктивной деятельности детей. Средняя группа.
Развитие навыков сотрудничества в совместной продуктивной деятельности детей. Средняя группа. Подпорные стенки: назначение и основные конструктивные решения
Подпорные стенки: назначение и основные конструктивные решения Рабочая тетрадь по чистописанию (2 класс)
Рабочая тетрадь по чистописанию (2 класс) Выставление оценок в электронный журнал
Выставление оценок в электронный журнал Введение в проектное обучение и управление
Введение в проектное обучение и управление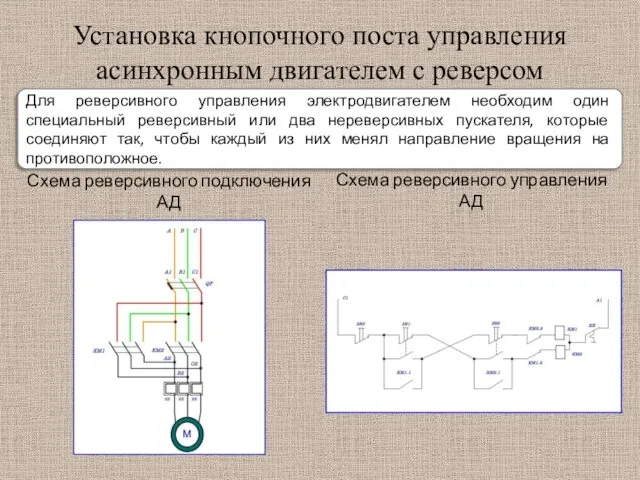 Установка кнопочного поста управления асинхронным двигателем с реверсом
Установка кнопочного поста управления асинхронным двигателем с реверсом От Исландии до Пиренейского полуострова
От Исландии до Пиренейского полуострова Экология
Экология Заболевания органов кроветворения
Заболевания органов кроветворения