- Транспорт умного города. Электромобили

Содержание
- 2. План Кое-что об электромобилях в умном городе Управление трафиком умного города Беспилотные автомобили в умном городе
- 3. Чем хорош электромобиль в городе Не загрязняет воздух Регенерирует энергию торможения Эффективнее на скоростях движения Тише
- 4. Что такое электромобиль ` ` ` Батарея Зарядное устройство Контроллер электродвигателя (инвертор) Электродвигатель Сеть Постоянное напряжение
- 5. Tesla Model 3 Зарядное устройство Батарея Контроллер электродвигателя (инвертор) Электродвигатель
- 6. Тестовые маршруты Artemis (EU) http://www.car-engineer.com/the-different-driving-cycles/
- 7. ДВС vs электродвигатель об/мин Крутящий момент ДВС электродвигатель электродвигатель ДВС Vatanparvar, K., Wan, J. and Al
- 8. Потери в автомобиле с ДВС Эффективность: 12%–30% https://www.fueleconomy.gov/feg/atv-ev.shtml
- 9. Потери в электромобиле Эффективность: 72%–94% https://www.fueleconomy.gov/feg/atv-ev.shtml
- 10. Чем заряжать электромобиль
- 11. Инфраструктурные проблемы заряда электромобиля Как разместить зарядные станции Путешествие из точки А в точку Б Исходя
- 12. Распределение заряда по времени Smart grid: вместе с электроэнергией передается информация Vehicle-to-grid (V2G): автомобиль взаимодействует с
- 13. Размещение: как парковки сколько электромобилей (кВт ч) сколько зарядных станции (кВт ч) Нет красных пятен на
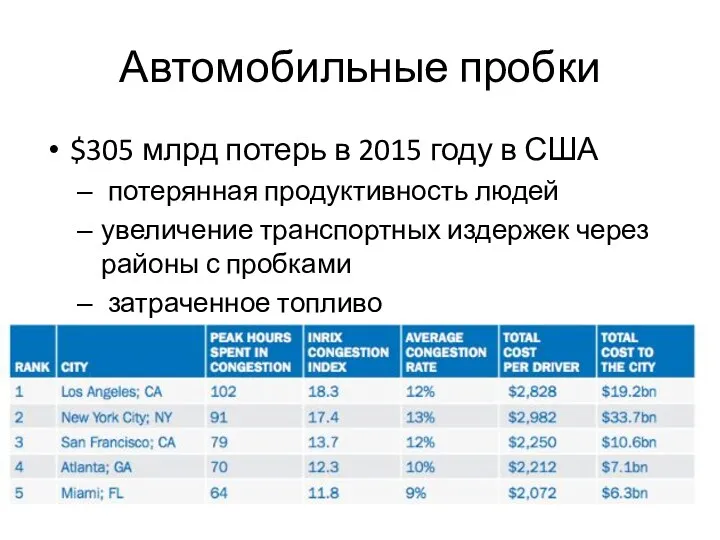
- 14. Автомобильные пробки $305 млрд потерь в 2015 году в США потерянная продуктивность людей увеличение транспортных издержек
- 15. Светофор как замкнутая система управления
- 16. Очередь перед светофором: индуктивный датчик
- 17. Очередь перед светофором: камера https://www.youtube.com/watch?v=WxWiHV8RFFg
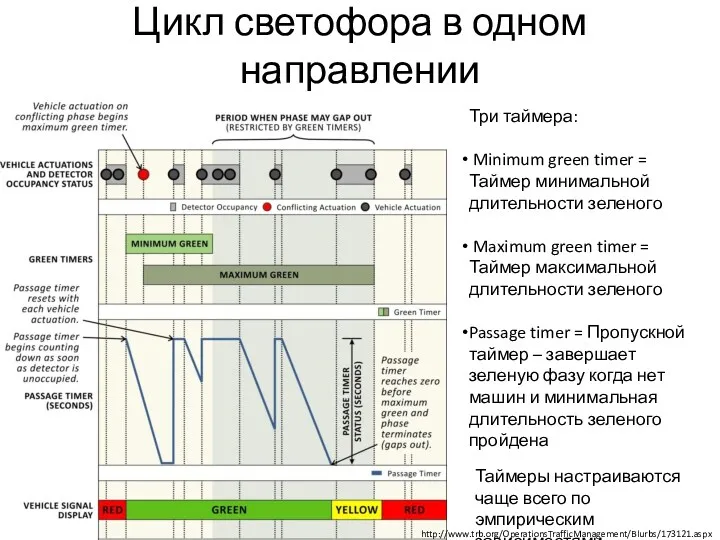
- 18. Цикл светофора в одном направлении http://www.trb.org/OperationsTrafficManagement/Blurbs/173121.aspx Три таймера: Minimum green timer = Таймер минимальной длительности зеленого
- 24. Поток через светофор на зеленый Предельный (насыщенный) поток – когда вся очередь проезжает полностью Время с
- 25. Теория элементарного перекрестка http://www.uvm.edu/pdodds/files/papers/others/2008/lammer2008a.pdf http://users.cecs.anu.edu.au/~ssanner/Papers/traffic_tutorial.pdf Входящий поток ?/ час Количество машин в очереди Действуют стационарные ненасыщенные
- 26. Координированный трафик и пространственно-временная диаграмма В США: если расстояние между перекрестками меньше 0,5 мили (800 метров).
- 27. Трафик через скоординированный светофор https://www.osti.gov/pages/servlets/purl/1433805
- 28. Оптимизация для общего случая http://orbit.dtu.dk/files/3050157/tr08_01.pdf Полное время перемещения Время перемещения по участку системы (из имитационной модели)
- 29. Управление в реальном времени На основе эвристических подходов (идентификация караванов и зеленых волн). Пример систем: SCOOT,
- 30. Неустойчивость трафика: элементарная модель время реакции водителя коэффициент чувствительности http://users.monash.edu.au/~mpetn/files/talks/Hoogendoorn.pdf
- 31. Поток q: ?/ час Неустойчивость трафика: от плотного движения к пробке Плотность ρ : ?/ км
- 32. Огораживание проблемного трафика
- 33. Гидродинамика трафика Уравнение непрерывности трафика: x x t t Решение уравнения непрерывности = пространственно-временная диаграмма Ударная
- 34. Автопилот Повышение безопасности Достижение более точного движения Автоматизация вождения
- 35. Уровни автономного управления Вы сейчас здесь https://ec.europa.eu/transparency/regdoc/rep/1/2018/EN/COM-2018-283-F1-EN-MAIN-PART-1.PDF
- 36. Автомобиль с автопилотом: сенсоры Камеры Лидар Радары
- 37. Сенсоры: камера
- 38. Сенсоры: лидар
- 39. Архитектура системы автопилота Датчики Распознавание Локальная карта Обгон и преодоление препятствий Круиз-контроль Удержание полосы Управление автомобилем
- 40. Распознавание объектов Имеет ли это изображение предмет X? Один из методов Aggregated Channel Features (ACF) detector:
- 41. Расстояние по камере Taylor, T., Geva, S. and Boles, W.W., 2004. Monocular vision as a range
- 42. Система координат по камере
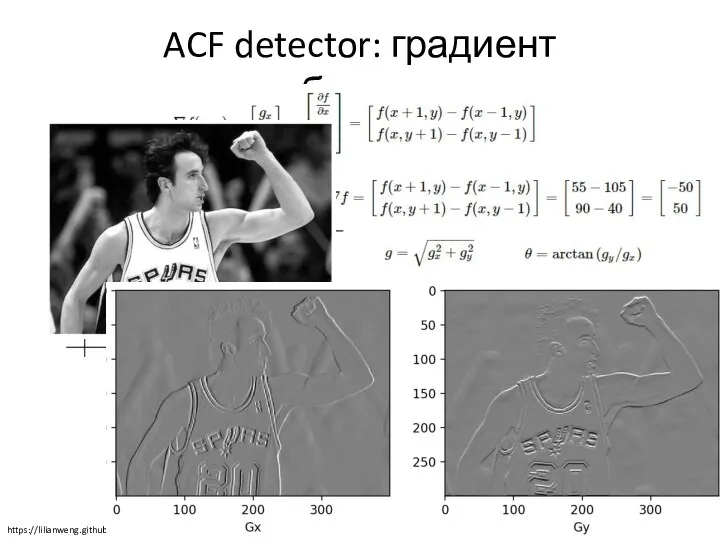
- 43. https://lilianweng.github.io/lil-log/2017/10/29/object-recognition-for-dummies-part-1.html ACF detector: градиент изображения
- 44. ACF detector: гистограмма направленных градиентов (HOG) HOG = дескриптор изображения HOG хорошо сохраняется при масштабировании
- 45. Каналы данных детектора ACF: grayscale изображение, амплитуда (длина вектора) градиента гистограммы ориентированных градиентов, отобранные в 6
- 46. ACF детектор: концепция дерева решений и каскада классификаторов AdaBoost классификатор
- 47. ACF: структура классификатора Исходное изображение Пирамида уменьшенных изображений/каналов (по 10 изображений на каждом уровне) Скользящее окно
- 48. ACF детектор (MATLAB Automated Driving System Toolbox) https://www.mathworks.com/help/driving/examples/visual-perception-using-monocular-camera.html
- 49. Адаптивный круиз-контроль https://www.mathworks.com/help/mpc/examples/design-an-adaptive-cruise-control-system-using-model-predictive-control.html Время между машинами Пропорционально-интегральный регулятор Автомобиль Газ
- 50. Динамика автомобиля Тип модели: “двухколесный робот”, аффинная нелинейная система: Преобразование координат https://www.mathworks.com/help/mpc/ug/adaptive-cruise-control-with-sensor-fusion.html Вектор состояний: скорости и
- 51. Задача управления https://www.mathworks.com/help/mpc/ug/adaptive-cruise-control-with-sensor-fusion.html поддержание постоянной скорости координата машины впереди на безопасном расстоянии ускорение в заданных пределах
- 52. Управление на основе предсказывающей модели: model predictive control (MPC) Борисевич А.В. Теория автоматического управления: элементарное введение
- 53. Демонстрация в Simulink
- 55. Скачать презентацию
План
Кое-что об электромобилях в умном городе
Управление трафиком умного города
Беспилотные автомобили в
План
Кое-что об электромобилях в умном городе
Управление трафиком умного города
Беспилотные автомобили в
Чем хорош электромобиль в городе
Не загрязняет воздух
Регенерирует энергию торможения
Эффективнее на скоростях
Чем хорош электромобиль в городе
Не загрязняет воздух
Регенерирует энергию торможения
Эффективнее на скоростях

Что такое электромобиль
`
`
`
Батарея
Зарядное
устройство
Контроллер
электродвигателя
(инвертор)
Электродвигатель
Сеть
Постоянное напряжение
Переменное напряжение
Что такое электромобиль
`
`
`
Батарея
Зарядное
устройство
Контроллер
электродвигателя
(инвертор)
Электродвигатель
Сеть
Постоянное напряжение
Переменное напряжение
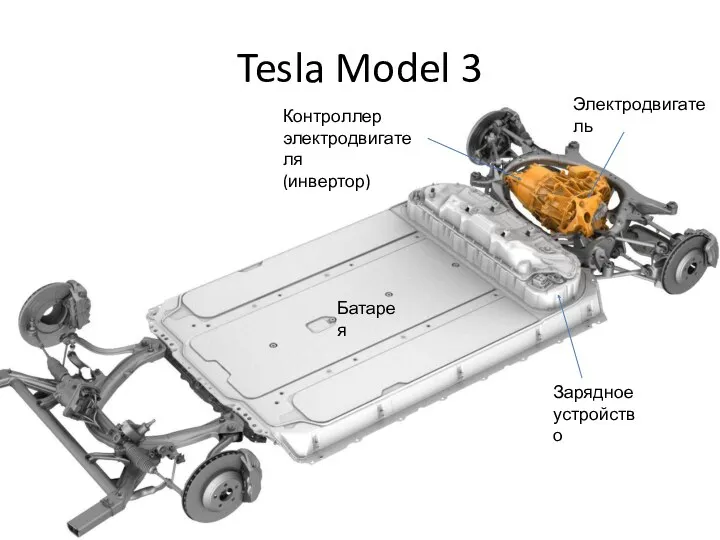
Tesla Model 3
Зарядное
устройство
Батарея
Контроллер
электродвигателя
(инвертор)
Электродвигатель
Tesla Model 3
Зарядное
устройство
Батарея
Контроллер
электродвигателя
(инвертор)
Электродвигатель
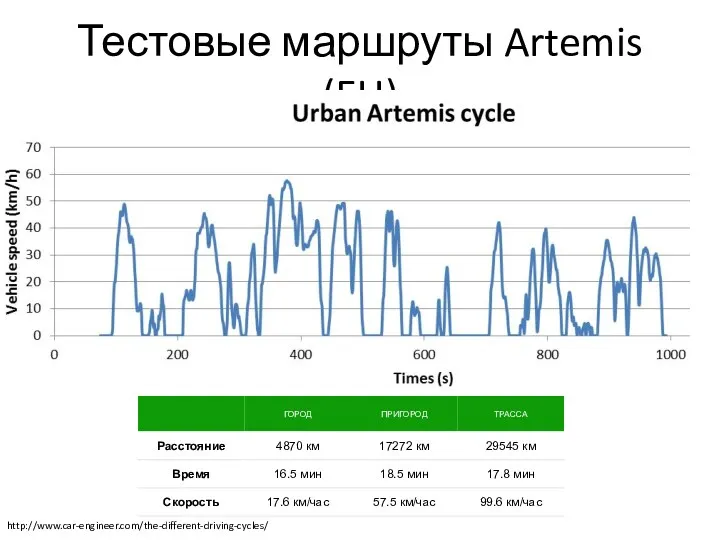
Тестовые маршруты Artemis (EU)
http://www.car-engineer.com/the-different-driving-cycles/
Тестовые маршруты Artemis (EU)
http://www.car-engineer.com/the-different-driving-cycles/
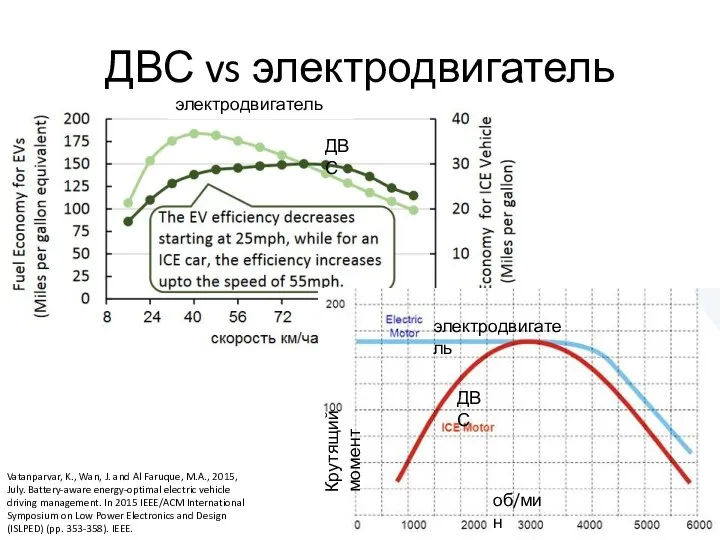
ДВС vs электродвигатель
об/мин
Крутящий момент
ДВС
электродвигатель
электродвигатель
ДВС
Vatanparvar, K., Wan, J. and Al Faruque, M.A.,
ДВС vs электродвигатель
об/мин
Крутящий момент
ДВС
электродвигатель
электродвигатель
ДВС
Vatanparvar, K., Wan, J. and Al Faruque, M.A.,

Потери в автомобиле с ДВС
Эффективность: 12%–30%
https://www.fueleconomy.gov/feg/atv-ev.shtml
Потери в автомобиле с ДВС
Эффективность: 12%–30%
https://www.fueleconomy.gov/feg/atv-ev.shtml

Потери в электромобиле
Эффективность: 72%–94%
https://www.fueleconomy.gov/feg/atv-ev.shtml
Потери в электромобиле
Эффективность: 72%–94%
https://www.fueleconomy.gov/feg/atv-ev.shtml
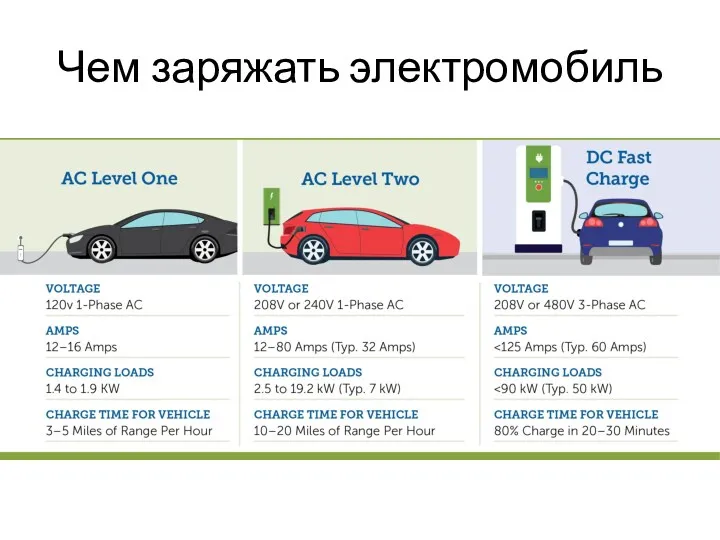
Чем заряжать электромобиль
Чем заряжать электромобиль
Инфраструктурные проблемы заряда электромобиля
Как разместить зарядные станции
Путешествие из точки А в
Инфраструктурные проблемы заряда электромобиля
Как разместить зарядные станции
Путешествие из точки А в
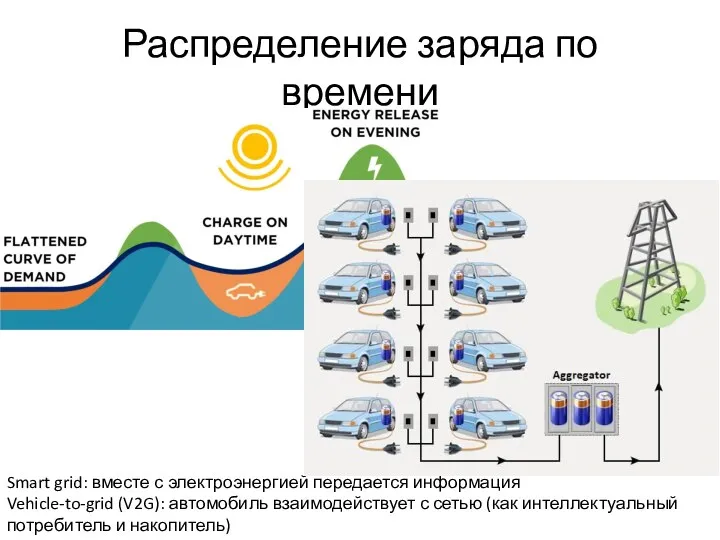
Распределение заряда по времени
Smart grid: вместе с электроэнергией передается информация
Vehicle-to-grid (V2G):
Распределение заряда по времени
Smart grid: вместе с электроэнергией передается информация
Vehicle-to-grid (V2G):
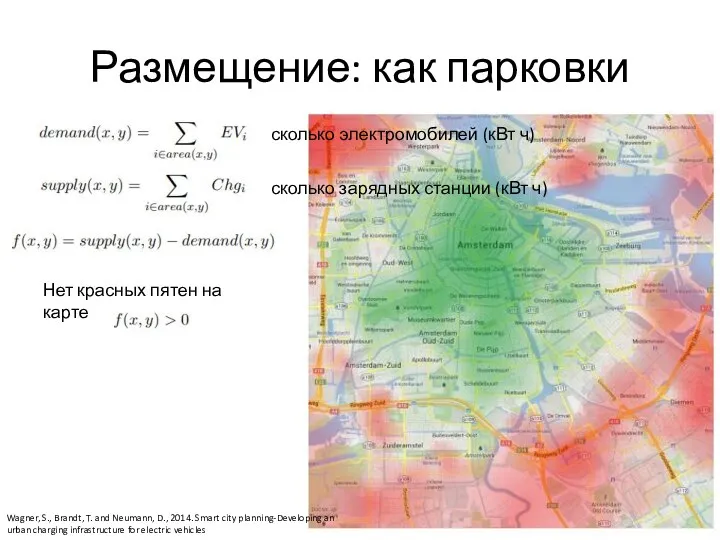
Размещение: как парковки
сколько электромобилей (кВт ч)
сколько зарядных станции (кВт ч)
Нет красных
Размещение: как парковки
сколько электромобилей (кВт ч)
сколько зарядных станции (кВт ч)
Нет красных
Автомобильные пробки
$305 млрд потерь в 2015 году в США
потерянная продуктивность
Автомобильные пробки
$305 млрд потерь в 2015 году в США
потерянная продуктивность
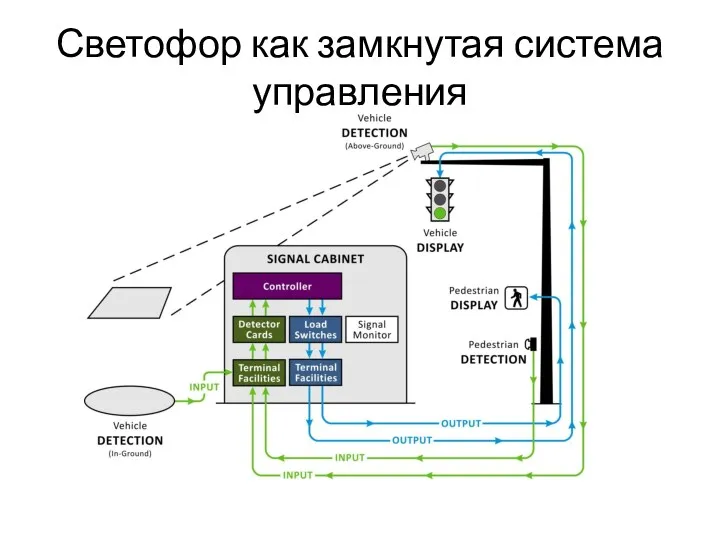
Светофор как замкнутая система управления
Светофор как замкнутая система управления

Очередь перед светофором: индуктивный датчик
Очередь перед светофором: индуктивный датчик

Очередь перед светофором: камера
https://www.youtube.com/watch?v=WxWiHV8RFFg
Очередь перед светофором: камера
https://www.youtube.com/watch?v=WxWiHV8RFFg
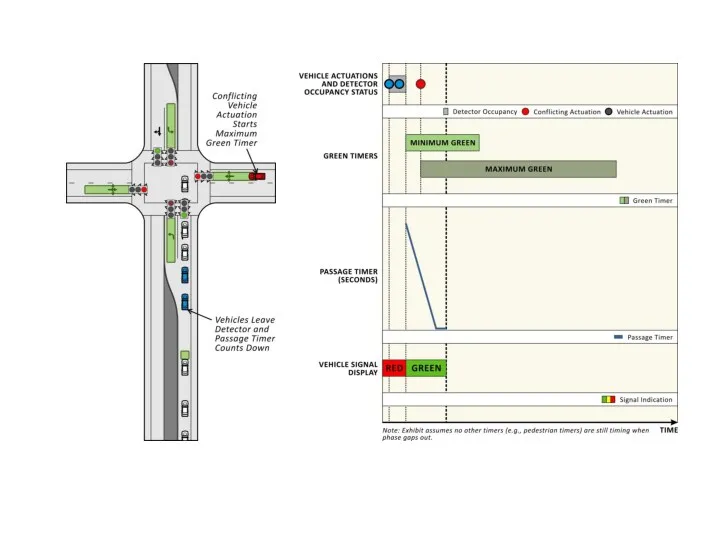
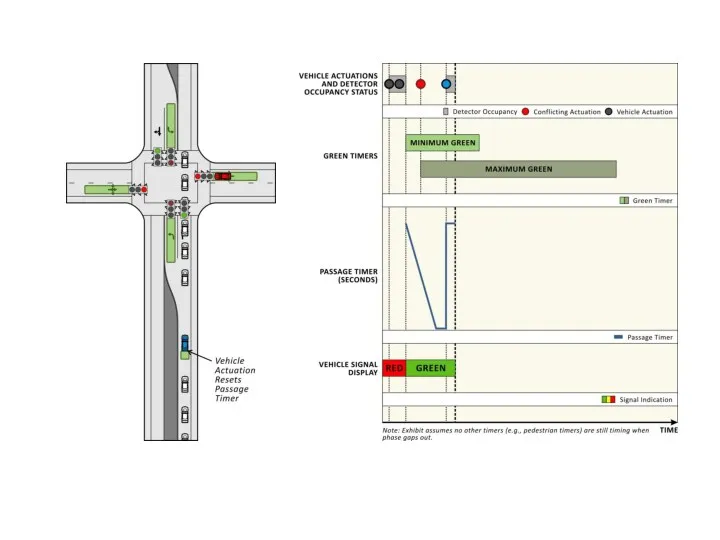
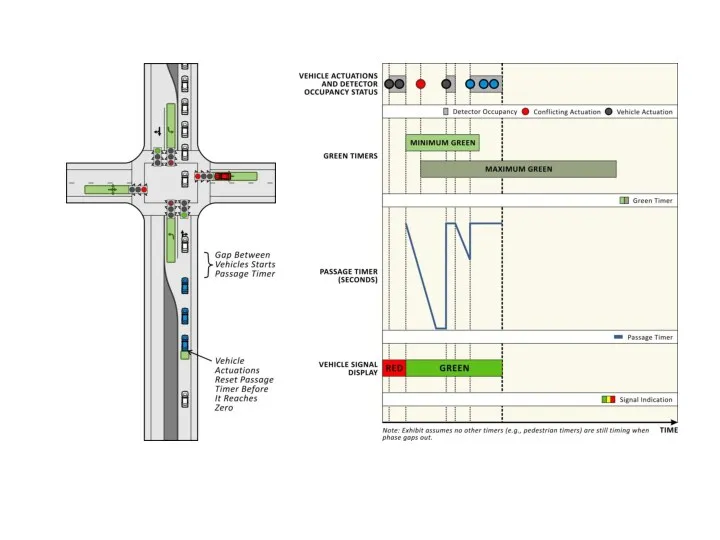
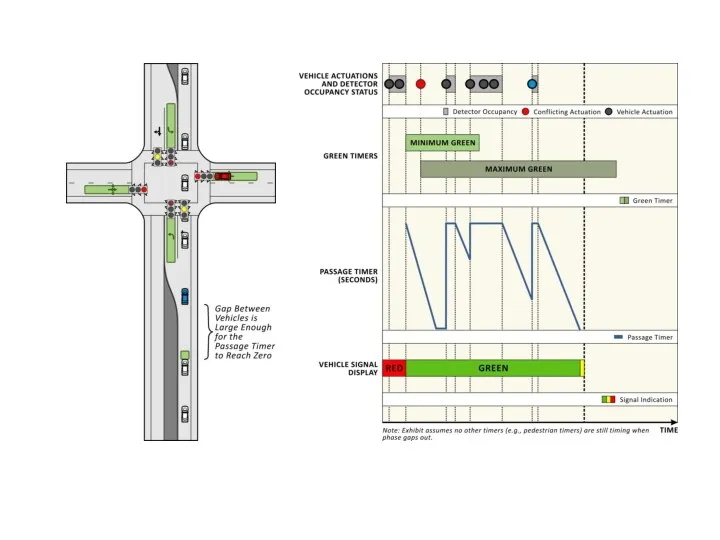
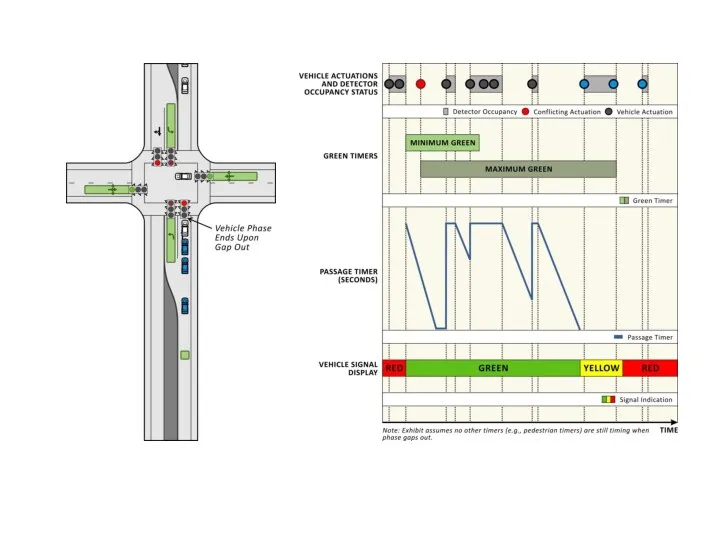
Цикл светофора в одном направлении
http://www.trb.org/OperationsTrafficManagement/Blurbs/173121.aspx
Три таймера:
Minimum green timer = Таймер
Цикл светофора в одном направлении
http://www.trb.org/OperationsTrafficManagement/Blurbs/173121.aspx
Три таймера:
Minimum green timer = Таймер

Поток через светофор на зеленый
Предельный (насыщенный) поток – когда вся очередь
Поток через светофор на зеленый
Предельный (насыщенный) поток – когда вся очередь
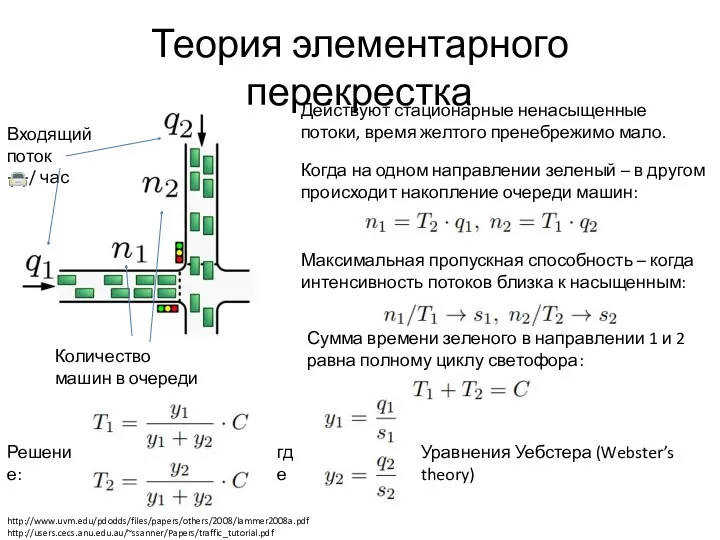
Теория элементарного перекрестка
http://www.uvm.edu/pdodds/files/papers/others/2008/lammer2008a.pdf
http://users.cecs.anu.edu.au/~ssanner/Papers/traffic_tutorial.pdf
Входящий поток
?/ час
Количество машин в очереди
Действуют стационарные ненасыщенные
Теория элементарного перекрестка
http://www.uvm.edu/pdodds/files/papers/others/2008/lammer2008a.pdf
http://users.cecs.anu.edu.au/~ssanner/Papers/traffic_tutorial.pdf
Входящий поток
?/ час
Количество машин в очереди
Действуют стационарные ненасыщенные
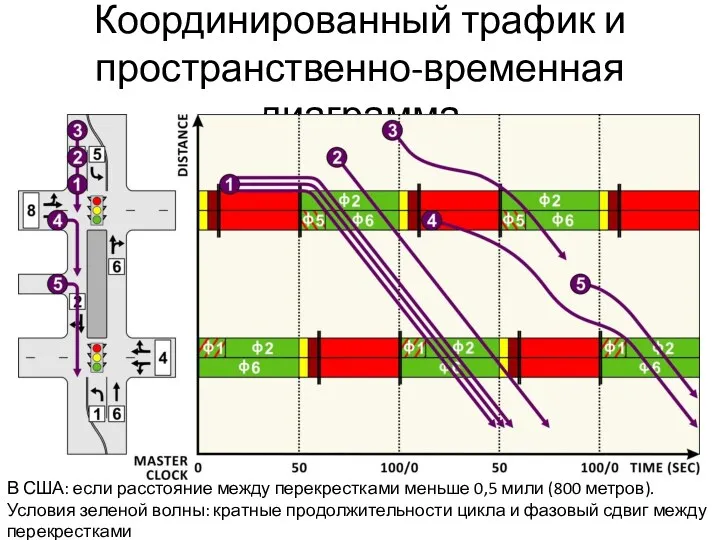
Координированный трафик и пространственно-временная диаграмма
В США: если расстояние между перекрестками
Координированный трафик и пространственно-временная диаграмма
В США: если расстояние между перекрестками
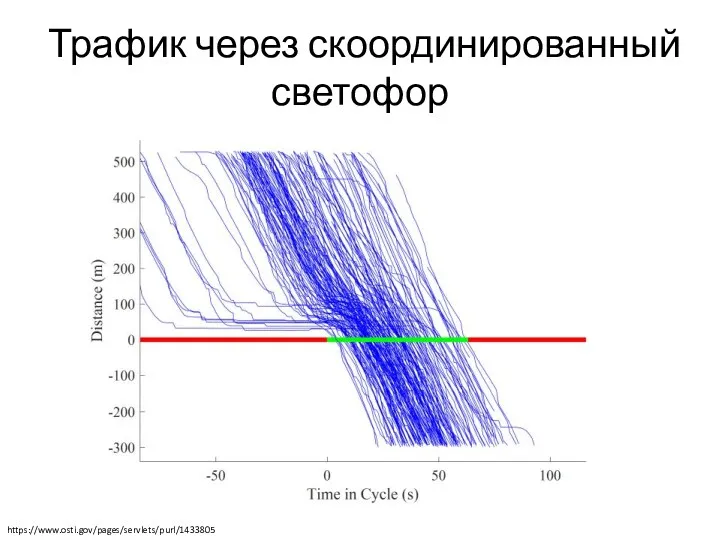
Трафик через скоординированный светофор
https://www.osti.gov/pages/servlets/purl/1433805
Трафик через скоординированный светофор
https://www.osti.gov/pages/servlets/purl/1433805
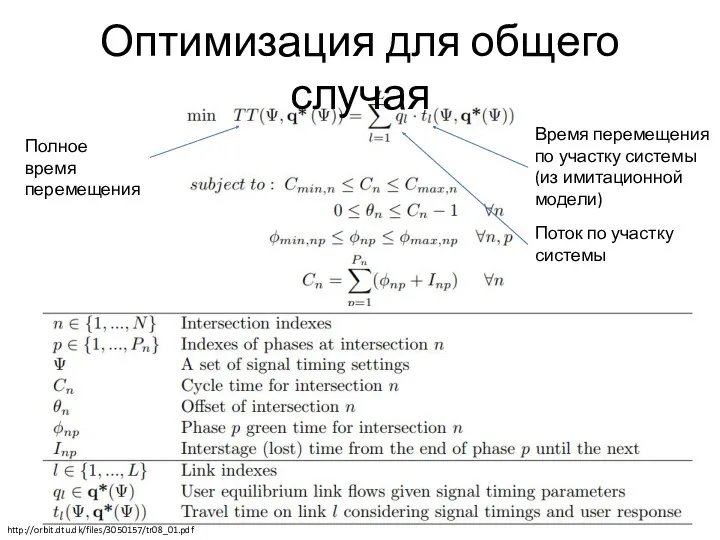
Оптимизация для общего случая
http://orbit.dtu.dk/files/3050157/tr08_01.pdf
Полное время перемещения
Время перемещения по участку системы
(из имитационной
Оптимизация для общего случая
http://orbit.dtu.dk/files/3050157/tr08_01.pdf
Полное время перемещения
Время перемещения по участку системы
(из имитационной
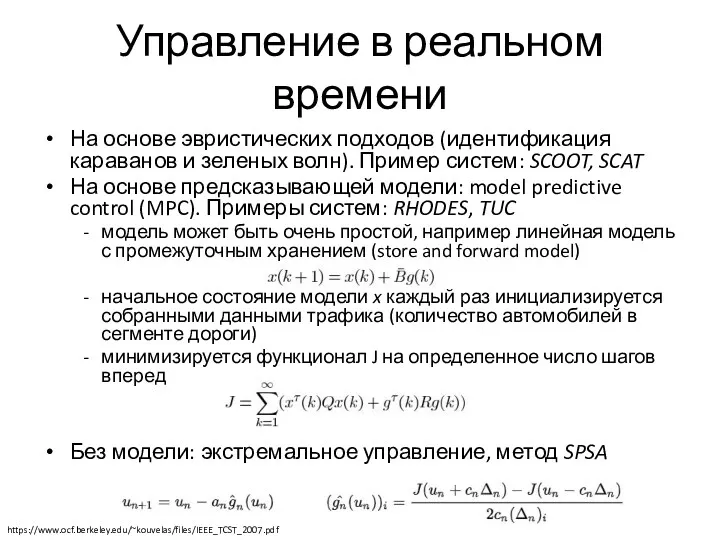
Управление в реальном времени
На основе эвристических подходов (идентификация караванов и зеленых
Управление в реальном времени
На основе эвристических подходов (идентификация караванов и зеленых
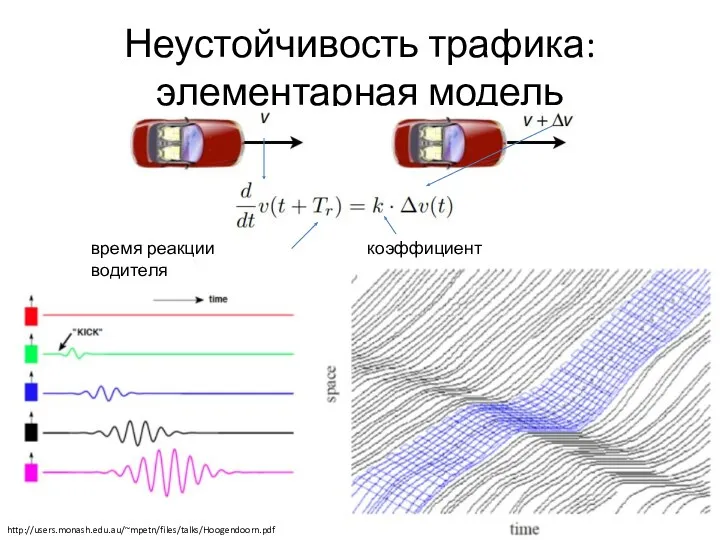
Неустойчивость трафика: элементарная модель
время реакции водителя
коэффициент чувствительности
http://users.monash.edu.au/~mpetn/files/talks/Hoogendoorn.pdf
Неустойчивость трафика: элементарная модель
время реакции водителя
коэффициент чувствительности
http://users.monash.edu.au/~mpetn/files/talks/Hoogendoorn.pdf
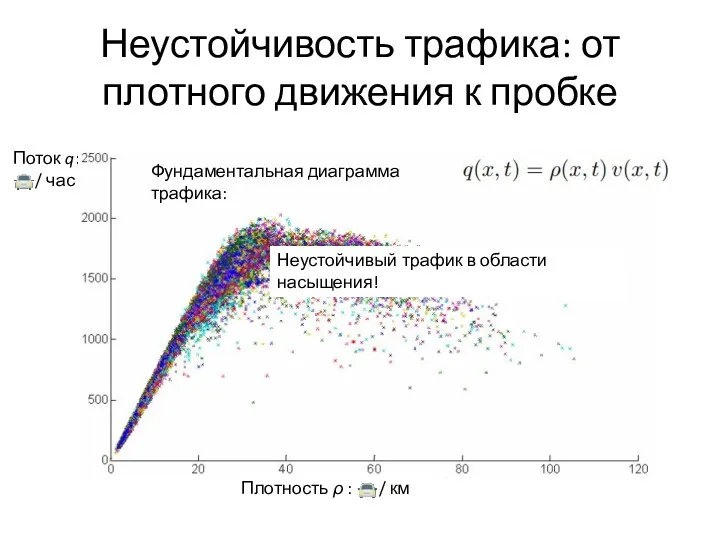
Поток q:
?/ час
Неустойчивость трафика: от плотного движения к пробке
Плотность ρ :
Поток q:
?/ час
Неустойчивость трафика: от плотного движения к пробке
Плотность ρ :
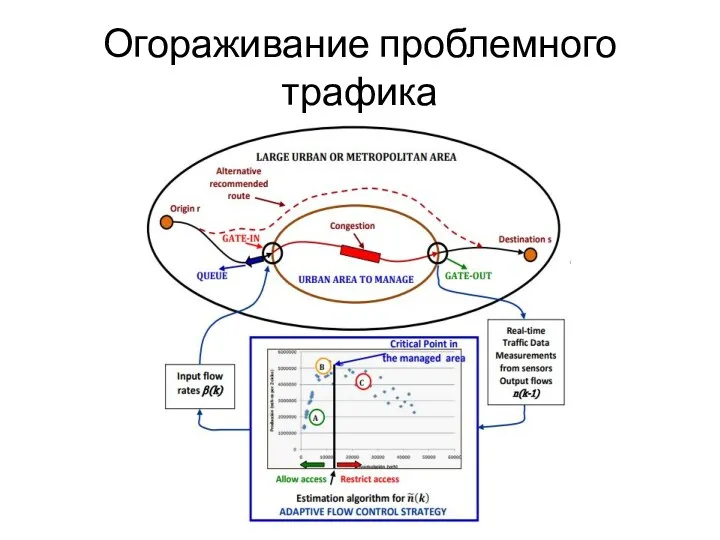
Огораживание проблемного трафика
Огораживание проблемного трафика
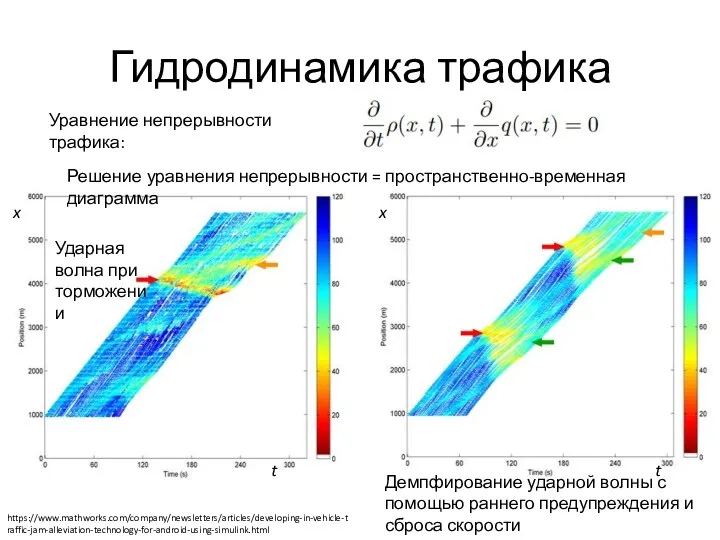
Гидродинамика трафика
Уравнение непрерывности трафика:
x
x
t
t
Решение уравнения непрерывности = пространственно-временная диаграмма
Ударная волна при
Гидродинамика трафика
Уравнение непрерывности трафика:
x
x
t
t
Решение уравнения непрерывности = пространственно-временная диаграмма
Ударная волна при
Автопилот
Повышение безопасности
Достижение более точного движения
Автоматизация вождения
Автопилот
Повышение безопасности
Достижение более точного движения
Автоматизация вождения

Уровни автономного управления
Вы сейчас здесь
https://ec.europa.eu/transparency/regdoc/rep/1/2018/EN/COM-2018-283-F1-EN-MAIN-PART-1.PDF
Уровни автономного управления
Вы сейчас здесь
https://ec.europa.eu/transparency/regdoc/rep/1/2018/EN/COM-2018-283-F1-EN-MAIN-PART-1.PDF

Автомобиль с автопилотом: сенсоры
Камеры
Лидар
Радары
Автомобиль с автопилотом: сенсоры
Камеры
Лидар
Радары
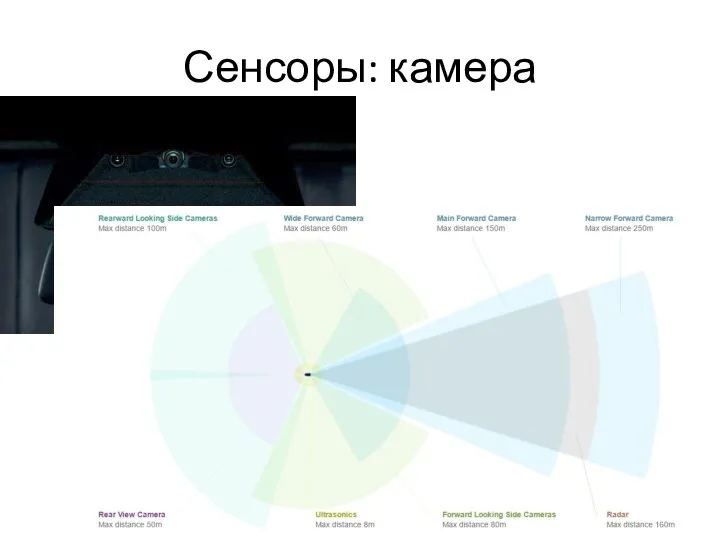
Сенсоры: камера
Сенсоры: камера
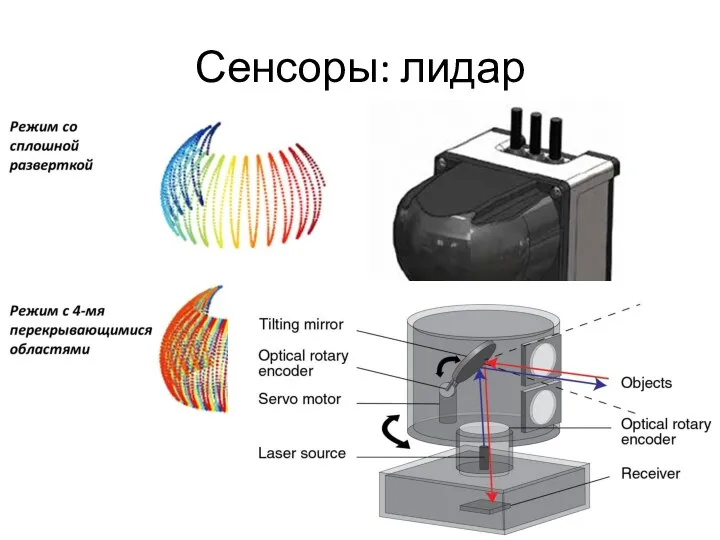
Сенсоры: лидар
Сенсоры: лидар

Архитектура системы автопилота
Датчики
Распознавание
Локальная карта
Обгон и преодоление препятствий
Круиз-контроль
Удержание полосы
Управление автомобилем
Fernandes, L.C., Souza,
Архитектура системы автопилота
Датчики
Распознавание
Локальная карта
Обгон и преодоление препятствий
Круиз-контроль
Удержание полосы
Управление автомобилем
Fernandes, L.C., Souza,
Распознавание объектов
Имеет ли это изображение предмет X?
Один из методов Aggregated Channel
Распознавание объектов
Имеет ли это изображение предмет X?
Один из методов Aggregated Channel

Расстояние по камере
Taylor, T., Geva, S. and Boles, W.W., 2004. Monocular
Расстояние по камере
Taylor, T., Geva, S. and Boles, W.W., 2004. Monocular

Система координат по камере
Система координат по камере
https://lilianweng.github.io/lil-log/2017/10/29/object-recognition-for-dummies-part-1.html
ACF detector: градиент изображения
https://lilianweng.github.io/lil-log/2017/10/29/object-recognition-for-dummies-part-1.html
ACF detector: градиент изображения
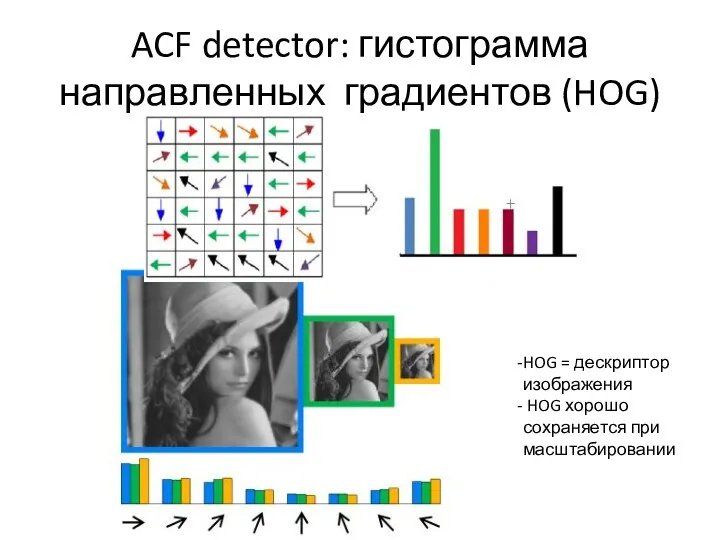
ACF detector: гистограмма направленных градиентов (HOG)
HOG = дескриптор изображения
HOG хорошо
ACF detector: гистограмма направленных градиентов (HOG)
HOG = дескриптор изображения
HOG хорошо
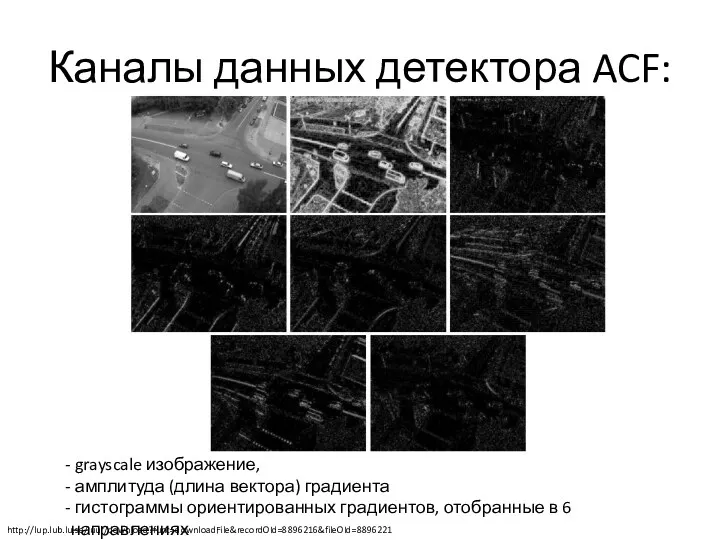
Каналы данных детектора ACF:
grayscale изображение,
амплитуда (длина вектора) градиента
гистограммы
Каналы данных детектора ACF:
grayscale изображение,
амплитуда (длина вектора) градиента
гистограммы
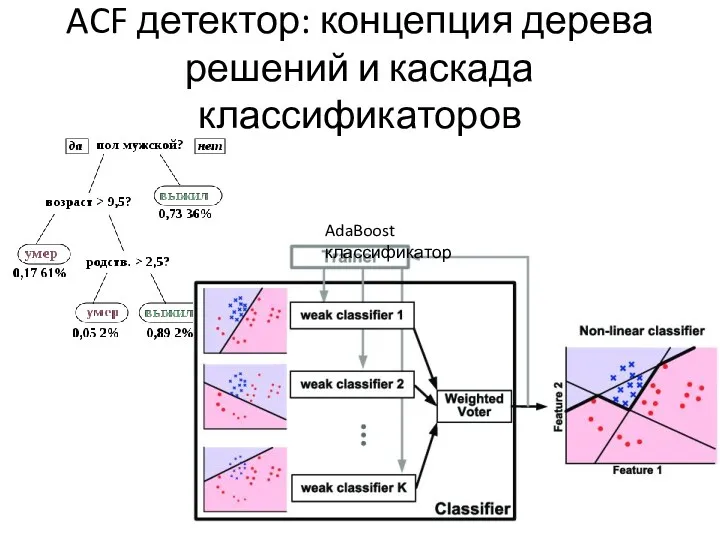
ACF детектор: концепция дерева решений и каскада классификаторов
AdaBoost классификатор
ACF детектор: концепция дерева решений и каскада классификаторов
AdaBoost классификатор
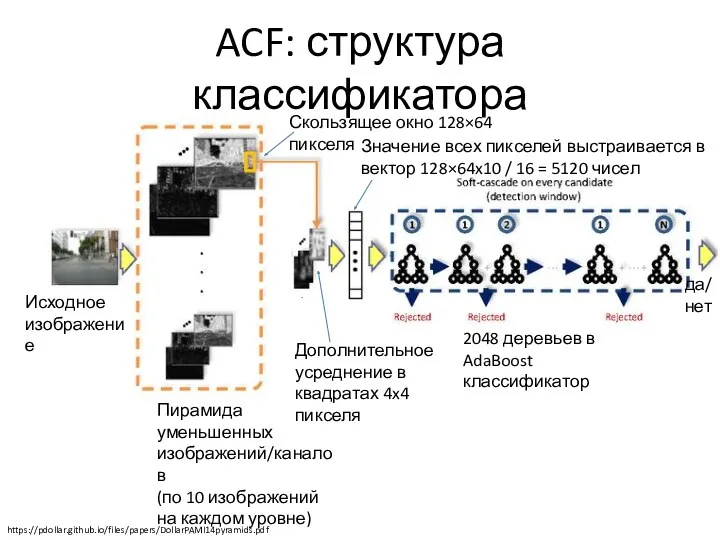
ACF: структура классификатора
Исходное
изображение
Пирамида
уменьшенных
изображений/каналов
(по 10 изображений
на каждом уровне)
Скользящее
ACF: структура классификатора
Исходное
изображение
Пирамида
уменьшенных
изображений/каналов
(по 10 изображений
на каждом уровне)
Скользящее
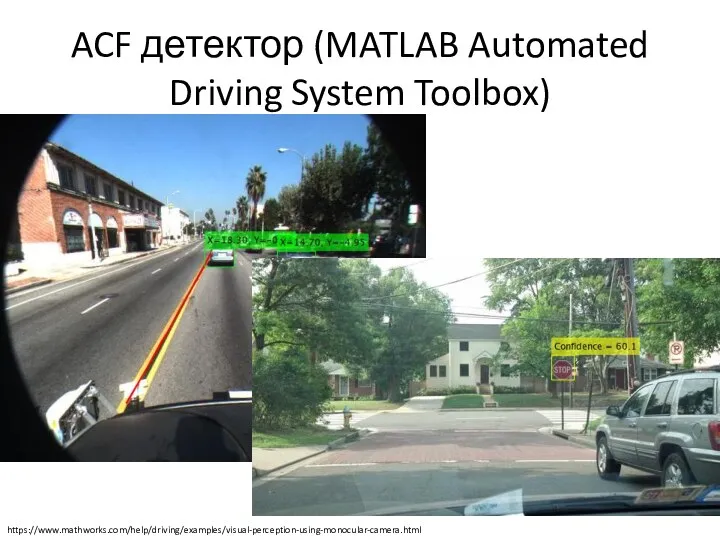
ACF детектор (MATLAB Automated Driving System Toolbox)
https://www.mathworks.com/help/driving/examples/visual-perception-using-monocular-camera.html
ACF детектор (MATLAB Automated Driving System Toolbox)
https://www.mathworks.com/help/driving/examples/visual-perception-using-monocular-camera.html
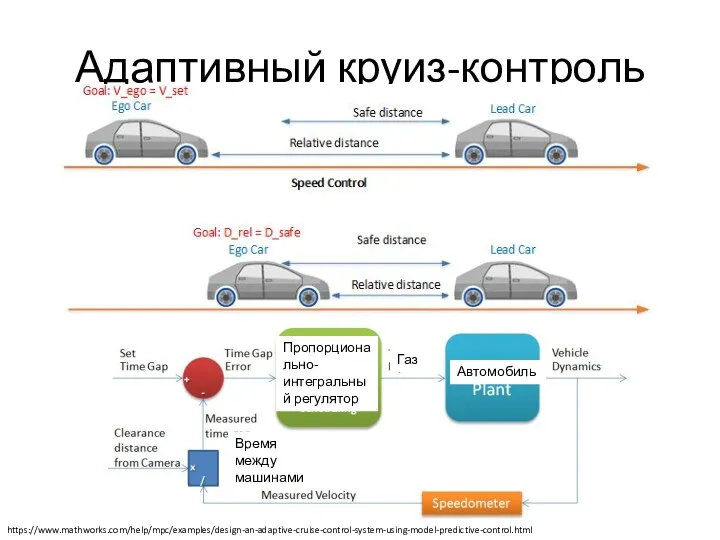
Адаптивный круиз-контроль
https://www.mathworks.com/help/mpc/examples/design-an-adaptive-cruise-control-system-using-model-predictive-control.html
Время между машинами
Пропорционально-интегральный регулятор
Автомобиль
Газ
Адаптивный круиз-контроль
https://www.mathworks.com/help/mpc/examples/design-an-adaptive-cruise-control-system-using-model-predictive-control.html
Время между машинами
Пропорционально-интегральный регулятор
Автомобиль
Газ
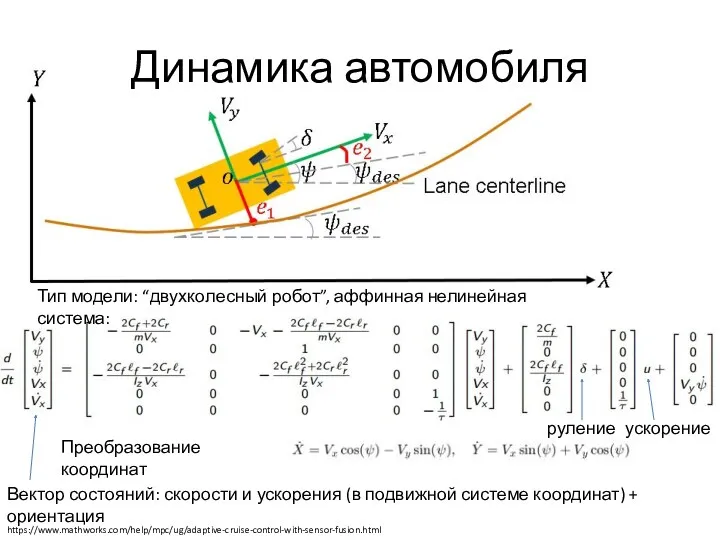
Динамика автомобиля
Тип модели: “двухколесный робот”, аффинная нелинейная система:
Преобразование координат
https://www.mathworks.com/help/mpc/ug/adaptive-cruise-control-with-sensor-fusion.html
Вектор состояний: скорости
Динамика автомобиля
Тип модели: “двухколесный робот”, аффинная нелинейная система:
Преобразование координат
https://www.mathworks.com/help/mpc/ug/adaptive-cruise-control-with-sensor-fusion.html
Вектор состояний: скорости
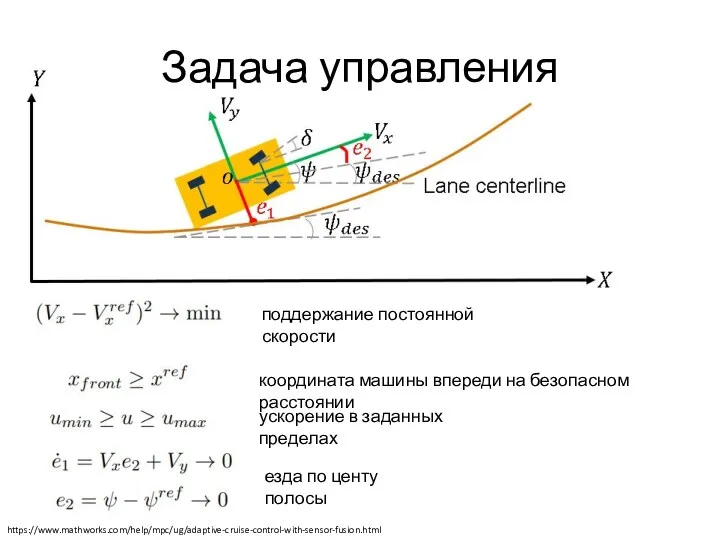
Задача управления
https://www.mathworks.com/help/mpc/ug/adaptive-cruise-control-with-sensor-fusion.html
поддержание постоянной скорости
координата машины впереди на безопасном расстоянии
ускорение в заданных
Задача управления
https://www.mathworks.com/help/mpc/ug/adaptive-cruise-control-with-sensor-fusion.html
поддержание постоянной скорости
координата машины впереди на безопасном расстоянии
ускорение в заданных
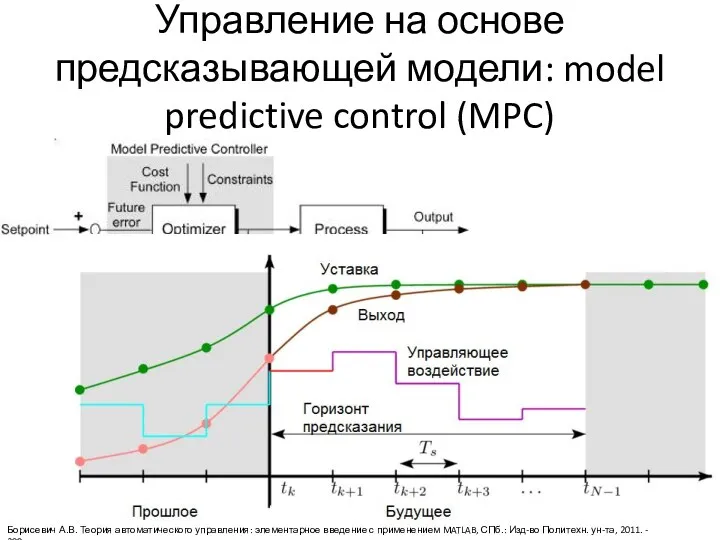
Управление на основе предсказывающей модели: model predictive control (MPC)
Борисевич А.В. Теория
Управление на основе предсказывающей модели: model predictive control (MPC)
Борисевич А.В. Теория
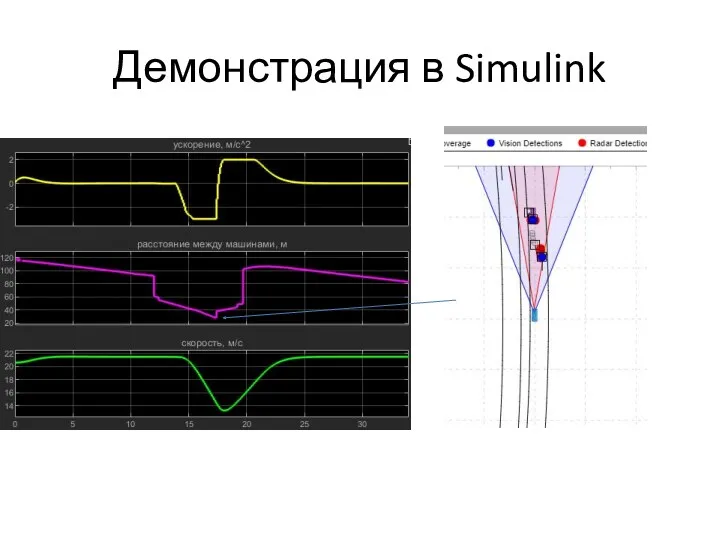
Демонстрация в Simulink
Демонстрация в Simulink
 Презентация Правила дорожного движения
Презентация Правила дорожного движения Творчество Художников-космистов
Творчество Художников-космистов Циклический алгоритм. Повторный алгоритм
Циклический алгоритм. Повторный алгоритм Карл Маркс (5.05.1818-14.03.1883)
Карл Маркс (5.05.1818-14.03.1883) Перемещение одним, двумя лицами пациента в постели
Перемещение одним, двумя лицами пациента в постели Механизация и автоматизация погрузочно-разгрузочных работ
Механизация и автоматизация погрузочно-разгрузочных работ Саванны
Саванны Мировой рынок и международное движение товаров
Мировой рынок и международное движение товаров Баба-яга в русских народных сказках
Баба-яга в русских народных сказках Альтернативные источники энергии. Ветрогенератор
Альтернативные источники энергии. Ветрогенератор Проект Из жизни слов. Слова свет и тьма
Проект Из жизни слов. Слова свет и тьма Презентация Народные промыслы Центральной России
Презентация Народные промыслы Центральной России Системы вентиляции воздуха
Системы вентиляции воздуха Поделки из бросового материала
Поделки из бросового материала Архитектурные конструкции общественных зданий (часть 2 - структура как архитектура)
Архитектурные конструкции общественных зданий (часть 2 - структура как архитектура) Модернизм в русской литературе
Модернизм в русской литературе Поражение сердечно-сосудистой системы при антифосфолипидном синдроме
Поражение сердечно-сосудистой системы при антифосфолипидном синдроме Харизма лидера. Владимир Ильич Ленин
Харизма лидера. Владимир Ильич Ленин презентация по искусству 8 класс
презентация по искусству 8 класс Лепра. Классификация групп лепры. Лечение
Лепра. Классификация групп лепры. Лечение Экология и энергосбережение
Экология и энергосбережение Педагогическая учеба: Технология подготовки презентации
Педагогическая учеба: Технология подготовки презентации Презентация к индивидуальному занятию по РРС и ФП в 4 классе по теме: Автоматизация звука Л
Презентация к индивидуальному занятию по РРС и ФП в 4 классе по теме: Автоматизация звука Л Адасобленыя акалічнасці
Адасобленыя акалічнасці Утверждение авторитарных и тоталитарных режимов в Италии и Испании
Утверждение авторитарных и тоталитарных режимов в Италии и Испании Коррекция нарушений осанки у детей с помощью физических упражнений
Коррекция нарушений осанки у детей с помощью физических упражнений Дневник взаимодействия детского сада и семьи
Дневник взаимодействия детского сада и семьи Корпоративные подарочные наборы
Корпоративные подарочные наборы