- Устройство и конструкция БВС

Содержание
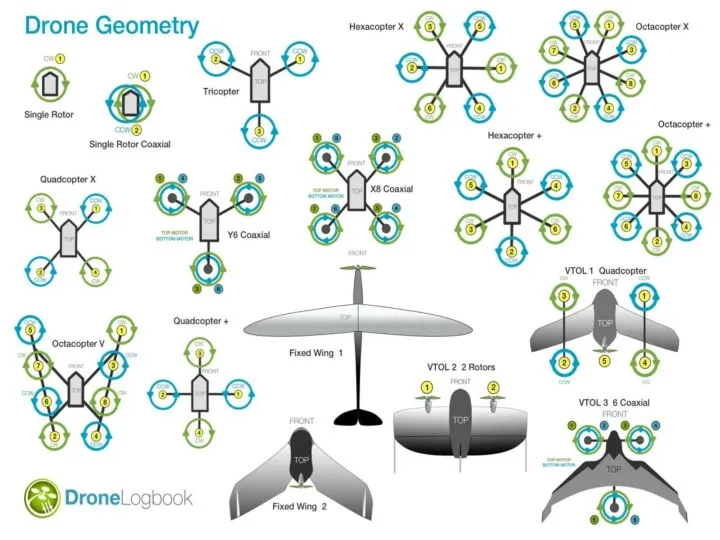
- 2. Мультироторный тип Беспилотная авиационная система (БАС) мультироторного типа Представляет собой беспилотное воздушное судно (БВС) с 3-я,
- 3. Мультироторный тип Трикоптер Квадрокоптер
- 4. Мультироторный тип Гексокоптер Октокоптер
- 5. Мультироторный тип Преимущества: имеет возможности “висеть”. делать фронтальные снимки объектов для создания более точных 3D моделей.
- 6. Рама — это основной, и несущий элемент конструкции квадрокоптера, к которому крепятся все прочие комплектующие. Расположение
- 7. Устройство БВС
- 8. Устройство БВС
- 9. Электроника Бесщеточные двигатели состоят из якоря с постоянным магнитом и ряда окружающих его катушек. Бесщеточные двигатели
- 10. Электроника Регулятор оборотов - устройство управляющее бесколлекторными двигателями постоянного тока, называется электронным регулятором скорости или ESC.
- 11. Электроника Полётный контроллер - это мозг квадрокоптера!
- 12. Электроника
- 13. Электроника Приёмник нужен для связи между коптером и пультом управления по средством радиосвязи.
- 14. Электроника FPV шлем и FPV очки — устройство, на которое передается видеопоток в реальном времени и
- 15. Электроника GPS модуль - система глобального позиционирования предназначена для установки местоположения БВС относительно земной поверхности.
- 16. Винты Пропеллеры бывают самых разных диаметров и размеров и могут быть изготовлены из пластика, углеродного волокна
- 17. Самолетный тип Такой тип аппаратов известен также как БПЛА с жестким крылом. Подъемная сила у них
- 18. Самолетный тип Летающие крыло Стандратная схема
- 19. Самолетный тип Преимущества: дальность манёвренность возможность продолжительного полёта большая высота Недостатки: требуется небольшая взлетно-посадочная полоса, чтобы
- 20. Самолетный тип
- 21. Самолетный тип
- 22. Самолетный тип
- 25. Скачать презентацию

Мультироторный тип
Беспилотная авиационная система (БАС) мультироторного типа
Представляет собой беспилотное воздушное
Мультироторный тип
Беспилотная авиационная система (БАС) мультироторного типа
Представляет собой беспилотное воздушное

Мультироторный тип
Трикоптер
Квадрокоптер
Мультироторный тип
Трикоптер
Квадрокоптер

Мультироторный тип
Гексокоптер
Октокоптер
Мультироторный тип
Гексокоптер
Октокоптер
Мультироторный тип
Преимущества:
имеет возможности “висеть”.
делать фронтальные снимки объектов для создания более точных 3D
Мультироторный тип
Преимущества:
имеет возможности “висеть”.
делать фронтальные снимки объектов для создания более точных 3D

Рама — это основной, и несущий элемент конструкции квадрокоптера, к которому крепятся
Рама — это основной, и несущий элемент конструкции квадрокоптера, к которому крепятся

Устройство БВС
Устройство БВС

Устройство БВС
Устройство БВС

Электроника
Бесщеточные двигатели состоят из якоря с постоянным магнитом и ряда окружающих
Электроника
Бесщеточные двигатели состоят из якоря с постоянным магнитом и ряда окружающих

Электроника
Регулятор оборотов - устройство управляющее бесколлекторными двигателями постоянного тока, называется электронным
Электроника
Регулятор оборотов - устройство управляющее бесколлекторными двигателями постоянного тока, называется электронным
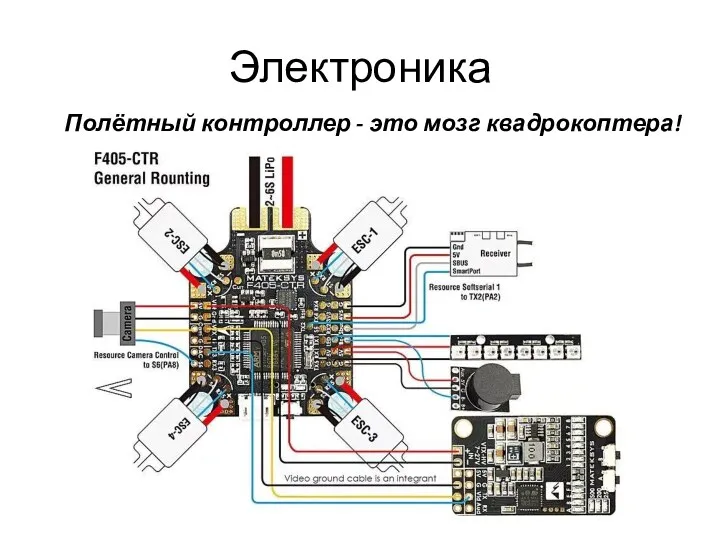
Электроника
Полётный контроллер - это мозг квадрокоптера!
Электроника
Полётный контроллер - это мозг квадрокоптера!

Электроника
Электроника

Электроника
Приёмник нужен для связи между коптером и пультом управления по средством
Электроника
Приёмник нужен для связи между коптером и пультом управления по средством

Электроника
FPV шлем и FPV очки — устройство, на которое передается видеопоток
Электроника
FPV шлем и FPV очки — устройство, на которое передается видеопоток

Электроника
GPS модуль - система глобального позиционирования предназначена для установки местоположения БВС
Электроника
GPS модуль - система глобального позиционирования предназначена для установки местоположения БВС

Винты
Пропеллеры бывают самых разных диаметров и размеров и могут быть изготовлены
Винты
Пропеллеры бывают самых разных диаметров и размеров и могут быть изготовлены

Самолетный тип
Такой тип аппаратов известен также как БПЛА с жестким
Самолетный тип
Такой тип аппаратов известен также как БПЛА с жестким

Самолетный тип
Летающие крыло
Стандратная схема
Самолетный тип
Летающие крыло
Стандратная схема
Самолетный тип
Преимущества:
дальность
манёвренность
возможность продолжительного полёта
большая высота
Недостатки:
требуется небольшая взлетно-посадочная полоса, чтобы подняться с
Самолетный тип
Преимущества:
дальность
манёвренность
возможность продолжительного полёта
большая высота
Недостатки:
требуется небольшая взлетно-посадочная полоса, чтобы подняться с
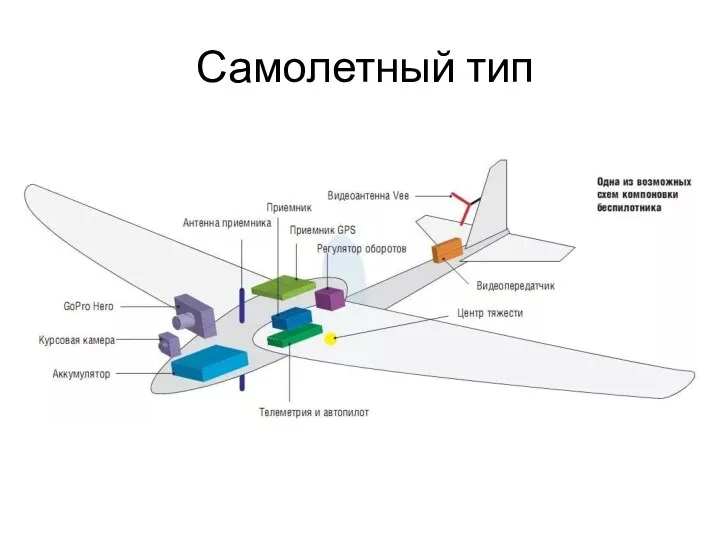
Самолетный тип
Самолетный тип

Самолетный тип
Самолетный тип

Самолетный тип
Самолетный тип
 Элементы улиц и дорог (1)
Элементы улиц и дорог (1) Архитектор территорий
Архитектор территорий Презентация Цветочные фантазии из фетра. Мастер-класс
Презентация Цветочные фантазии из фетра. Мастер-класс Родительское собрание О подростковом возрасте
Родительское собрание О подростковом возрасте Подготовка поверхности к покраске
Подготовка поверхности к покраске Святая блаженная Ксения Петербургская
Святая блаженная Ксения Петербургская Ветеран Великой Отечественной войны посёлка Рябинино Миков Виктор Петрович
Ветеран Великой Отечественной войны посёлка Рябинино Миков Виктор Петрович Дидактическая игра Лыжная прогулка
Дидактическая игра Лыжная прогулка Приключения барона Мюнхгаузена в Зимнем дворце
Приключения барона Мюнхгаузена в Зимнем дворце Микропроцессодың архитектурасы
Микропроцессодың архитектурасы Эдвард Григ, сюита Пер Гюнт
Эдвард Григ, сюита Пер Гюнт Методы исследования рынка. Сущность и процесс маркетингового исследования
Методы исследования рынка. Сущность и процесс маркетингового исследования Сенсоры. Классификация сенсоров. Терморезистивные, термоэлектрические, термомеханические, пироэлектрические преобразователи
Сенсоры. Классификация сенсоров. Терморезистивные, термоэлектрические, термомеханические, пироэлектрические преобразователи Виды ислама
Виды ислама Понятие формы. Многообразие форм окружающего мира
Понятие формы. Многообразие форм окружающего мира Биосфера. (6 класс)
Биосфера. (6 класс) 1917 год. От февраля к октябрю
1917 год. От февраля к октябрю Бизнес. Как управлять своим доходом. Сибирское здоровье
Бизнес. Как управлять своим доходом. Сибирское здоровье Дыхательная гимнастика
Дыхательная гимнастика Работа с клиентами, как составляющая имиджа компании Омскэлектро
Работа с клиентами, как составляющая имиджа компании Омскэлектро Образцы моделей выполнения упражнений
Образцы моделей выполнения упражнений Творческий проект Станок-лобзик универсальный стационарный
Творческий проект Станок-лобзик универсальный стационарный Магнитное поле. Линии магнитного поля. 9 класс
Магнитное поле. Линии магнитного поля. 9 класс Заповедники Санкт-Петербурга и Ленинградской области
Заповедники Санкт-Петербурга и Ленинградской области Презентация к уроку краеведение. Тема: Редкие животные
Презентация к уроку краеведение. Тема: Редкие животные Hands
Hands Родительское собрание в 1 классе Родителям о внимании первоклассников
Родительское собрание в 1 классе Родителям о внимании первоклассников чистые берега
чистые берега