- UAV linear accelerometer мodule

Содержание
- 2. An unmanned aerial vehicle (UAV), commonly known as a drone, is an aircraft without a human
- 3. It is required to design an UAV Linear Accelerometer Module. Hardware and software must meet the
- 4. Analysis of Technical Inquiry Functionally the device is represented by an accelerometer sensor unit, a computing
- 5. I2C (Inter-Integrated Circuit) is a serial protocol for two-wire interface to connect low-speed devices like microcontrollers,
- 6. Basic connection circuit of accelerometer An accelerometer is an electromechanical device that will measure acceleration forces.
- 7. Program listing for microcontroller is written in C and takes 7 standard A4 sheets. Electric circuit
- 8. Electric circuit
- 9. Expressing my appreciation to: Alexander Akishev – for the help in designing the module and programming
- 10. Nikolay Vasilevskiy – for implementation of the project as the real UAV with the Raspberry PI
- 12. Скачать презентацию
An unmanned aerial vehicle (UAV), commonly known as a drone, is an aircraft without
An unmanned aerial vehicle (UAV), commonly known as a drone, is an aircraft without
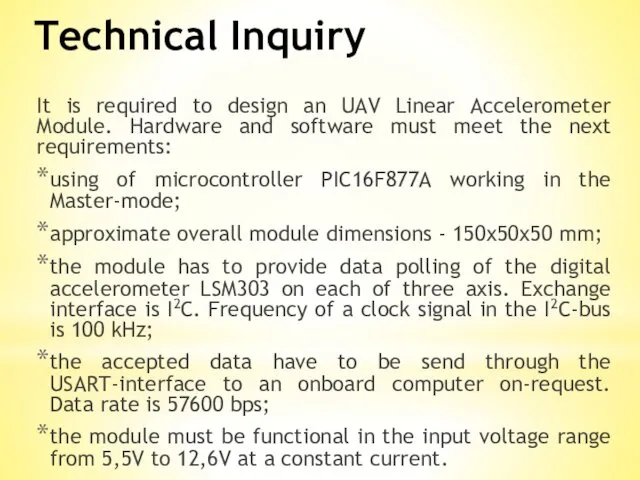
It is required to design an UAV Linear Accelerometer Module. Hardware
It is required to design an UAV Linear Accelerometer Module. Hardware
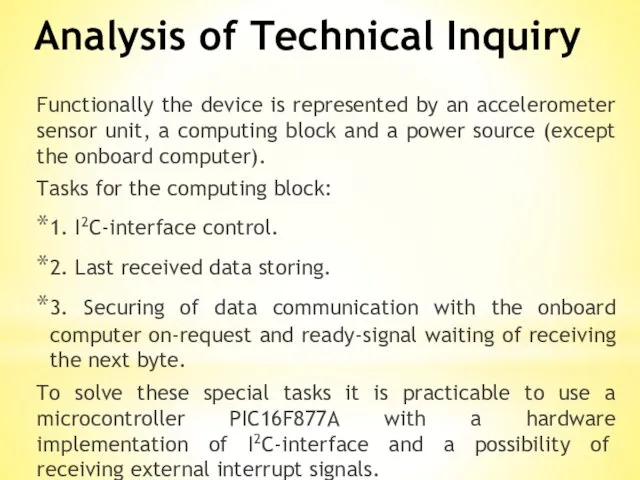
Analysis of Technical Inquiry
Functionally the device is represented by an accelerometer
Analysis of Technical Inquiry
Functionally the device is represented by an accelerometer
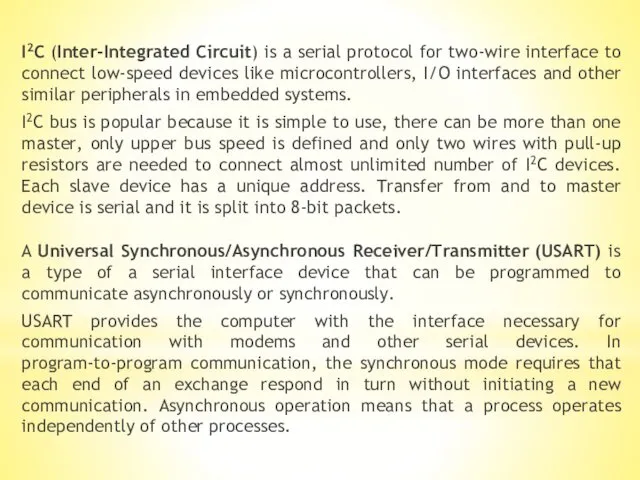
I2C (Inter-Integrated Circuit) is a serial protocol for two-wire interface to
I2C (Inter-Integrated Circuit) is a serial protocol for two-wire interface to
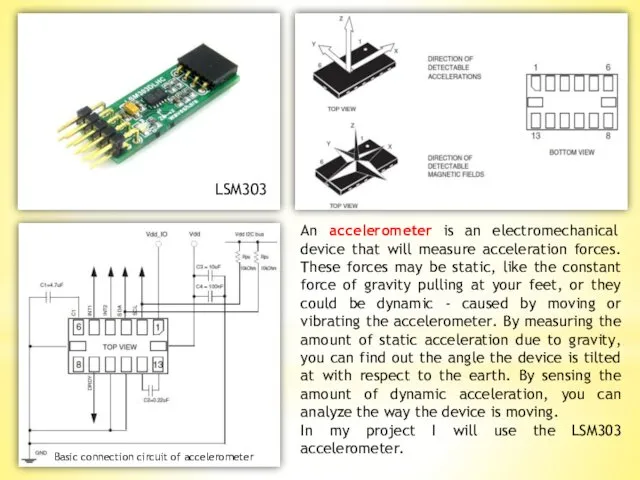
Basic connection circuit of accelerometer
An accelerometer is an electromechanical device that
Basic connection circuit of accelerometer
An accelerometer is an electromechanical device that
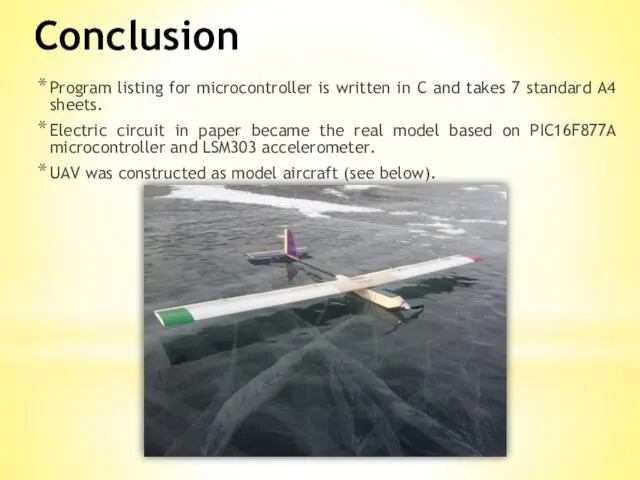
Program listing for microcontroller is written in C and takes 7
Program listing for microcontroller is written in C and takes 7
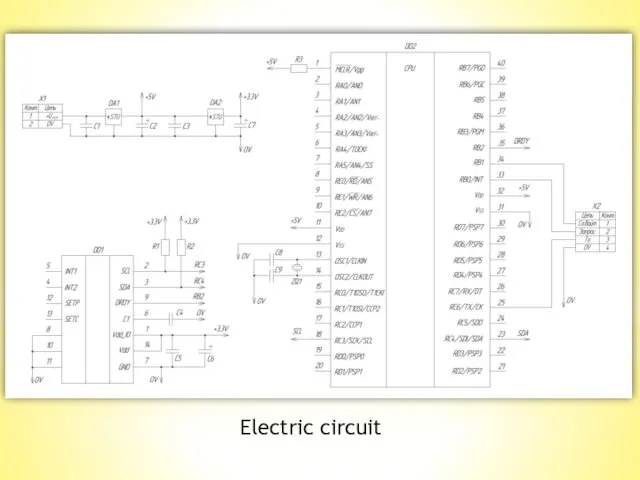
Electric circuit
Electric circuit
Expressing my appreciation to:
Alexander Akishev – for the help in designing
Expressing my appreciation to:
Alexander Akishev – for the help in designing

Nikolay Vasilevskiy – for implementation of the project as the real
Nikolay Vasilevskiy – for implementation of the project as the real
 Request. Will. Can. Could. Would
Request. Will. Can. Could. Would To be going to
To be going to A Lesson About Jobs
A Lesson About Jobs English alphabet
English alphabet People and Societ
People and Societ My Future Company
My Future Company Speaking about films
Speaking about films Сокращения в английском языке
Сокращения в английском языке The mass media. Game
The mass media. Game Lexical problems in translation
Lexical problems in translation Fruit. Tropical fruit
Fruit. Tropical fruit Food and cooking
Food and cooking Conditional sentences
Conditional sentences Итоги муниципального этапа ВcОШ по английскому языку 2014 - 2015 учебного года
Итоги муниципального этапа ВcОШ по английскому языку 2014 - 2015 учебного года Present Past Simple passive
Present Past Simple passive Структура письма
Структура письма Fast food
Fast food Future Simple. Простое будущее
Future Simple. Простое будущее Present continuous
Present continuous The United Kingdom of Great Britain and Northern Ireland
The United Kingdom of Great Britain and Northern Ireland Great Britain and Northern Ireland
Great Britain and Northern Ireland Present Cont
Present Cont Characteristics of humans and animals
Characteristics of humans and animals Packed & ready
Packed & ready My summer holidays plans
My summer holidays plans Personal Information. Basic 3
Personal Information. Basic 3 Phono-graphical level. Definitions and examples. Словарь терминов по стилистике английского языка
Phono-graphical level. Definitions and examples. Словарь терминов по стилистике английского языка Journeys. Unit 10.1
Journeys. Unit 10.1