- Радиолокационные системы

Содержание
- 2. Дать характеристику отраженным сигналам, шумам и помехам, раскрыв содержание основных физических факторов, определяющих параметры и модели
- 3. 2. Статистические характеристики шумов и помех. 1. Модели и характеристики отраженных сигналов. 3. Структура и математическая
- 4. Литература: Основная 3
- 5. Модели и характеристики отраженных сигналов Вопрос 1 4
- 6. Информацию о РЛЦ получают из принятого отраженного от цели радиолокационного сигнала. При теоретическом решении задач радиолокации
- 7. в) сигналы со случайной амплитудой и начальной фазой где b, β - амплитуда и фаза случайного
- 8. Амплитудные флюктуации носят более сложный характер и для различных целей могут описываться различными законами распределения. Одним
- 9. На рис. 4 представлены графики законов распределения Р(b) и Р(σц) соответственно Если цель облучается сравнительно длительное
- 10. АВТОКОРРЕЛЯЦИОННАЯ ФУНКЦИЯ И ЭНЕРГЕТИЧЕСКИЙ СПЕКТР ФЛЮКТУАЦИЙ ОТРАЖЕННОГО СИГНАЛА Эти характеристики показывают степень случайности флуктуаций отраженного сигнала,
- 11. С учетом модуляции спектр отраженного сигнала Sотр(f) имеет среднюю частоту f1 = fо-Fд ср и ширину
- 12. Кривая ρВ(τ) для рассматриваемого случая представлена на рис.6. 11
- 13. Интервал времени, характеризующий ширину пика автокорреляционной функции, например параметр может быть назван временем корреляции. Время корреляции
- 14. Выводы по первому вопросу 1. Таким образом, реальный отраженный сигнал имеет случайные амплитуду и фазу. Флюктуационные
- 15. Вопрос 2 СТАТИСТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ШУМОВ И ПОМЕХ 14
- 16. Флуктуационная помеха является наиболее распространенной в радиолокации. К ней относятся внутренний шум приемного устройства РЛС и
- 17. Для решения задач синтеза и анализа в радиолокации используют две основные модели флуктуационной помехи: квазибелый и
- 18. Скорость изменения мгновенных значений помехи определяется корреляционной функцией где ρ(τ) - нормированная корреляционная функция. Или, учитывая
- 19. Найдем время корреляции квазибелого шума. Для этого воспользуемся выражением (4). Очевидно, что ρ(τ)=0 тогда, когда sin2πfmaxτ
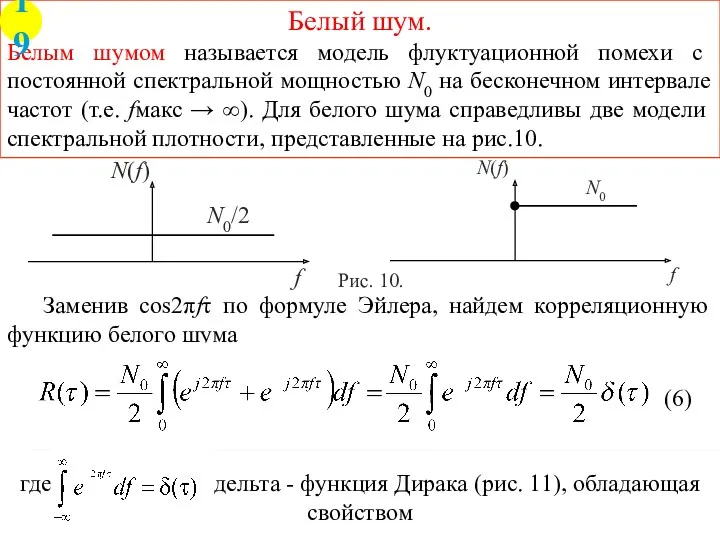
- 20. Белый шум. Белым шумом называется модель флуктуационной помехи с постоянной спектральной мощностью N0 на бесконечном интервале
- 21. 20
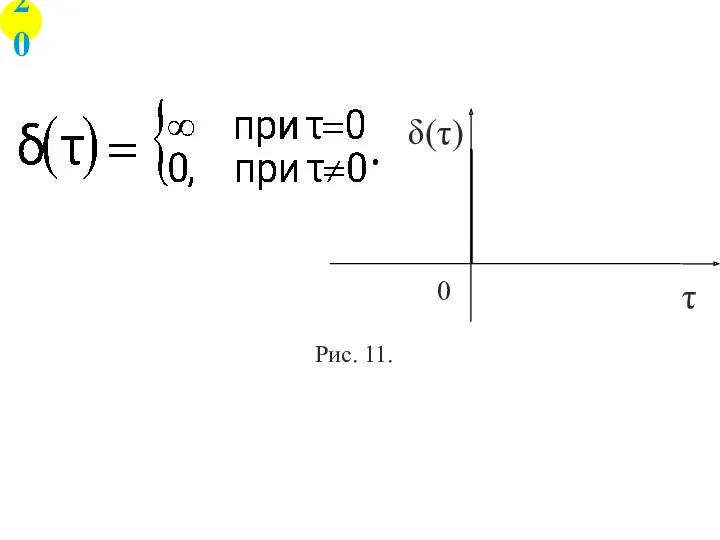
- 22. Из выражения (6) следует, что белый шум является дельта-коррелированным. Это означает бесконечно высокую скорость изменения его
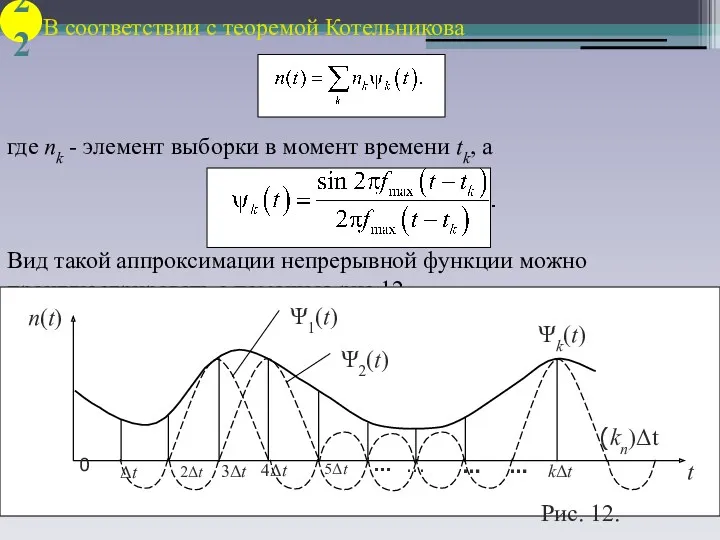
- 23. В соответствии с теоремой Котельникова где nk - элемент выборки в момент времени tk, a Вид
- 24. Замечательным свойством такого представления является то, что коэффициенты разложения ψk(t) - некоррелированы, а значит отсчёты yk
- 25. В общем случае, используя векторно-матричную запись, плотность вероятности m-элементной выборки нормально распределенного квазибелого шума можно представить
- 26. Выводы по второму вопросу Таким образом, полной статистической характеристикой колебаний помехи является плотность вероятности. Колебания помехи
- 27. Вопрос 3 СТРУКТУРА И МАТЕМАТИЧЕСКАЯ МОДЕЛЬ МЕШАЮЩИХ ОТРАЖЕНИЙ 26
- 28. Мешающие отражения обусловлены вторичным излучением поверхностно и объёмно распределенных отражателей, которые занимают достаточно большой объем пространства,
- 29. Процесс формирования отраженного сигнала от мешающих отражателей поясним с помощью следующих графиков (рис. 13). 28
- 30. Когда отражатели сосредоточены в отдельных разрешаемых объёмах, помеха носит имитирующий характер, когда они распределены и захватывают
- 31. Поэтому при использовании периодического ЗС энергетический спектр мешающих отражений оказывается гребенчатым с огибающей, определяемой энергетическим спектром
- 32. - различия в скорости перемещения мешающих отражателей и цели. Скорость перемещения наземных мешающих отражателей относительно наземной
- 33. Выводы по третьему вопросу Таким образом, из рассмотрения статистических характеристик мешающих отражений следует: 2. Энергетический спектр
- 34. 1. При отражении от движущейся блестящей точки зондирующий сигнал претерпевает: - трансформацию временного масштаба; - трансформацию
- 35. 6. Основными отличиями сигналов от целей и мешающих отражений являются: - поляризационные; - пространственные (распределенный характер
- 37. Скачать презентацию
Дать характеристику отраженным сигналам, шумам и помехам, раскрыв содержание основных
Дать характеристику отраженным сигналам, шумам и помехам, раскрыв содержание основных
2. Статистические характеристики шумов и помех.
1. Модели и характеристики
2. Статистические характеристики шумов и помех.
1. Модели и характеристики
Литература:
Основная
3
Литература:
Основная
3
Модели и характеристики
отраженных сигналов
Вопрос 1
4
Модели и характеристики
отраженных сигналов
Вопрос 1
4
Информацию о РЛЦ получают из принятого отраженного от цели радиолокационного сигнала.
Информацию о РЛЦ получают из принятого отраженного от цели радиолокационного сигнала.
в) сигналы со случайной амплитудой и начальной фазой
где b,
в) сигналы со случайной амплитудой и начальной фазой
где b,
Амплитудные флюктуации носят более сложный характер и для различных целей могут
Амплитудные флюктуации носят более сложный характер и для различных целей могут
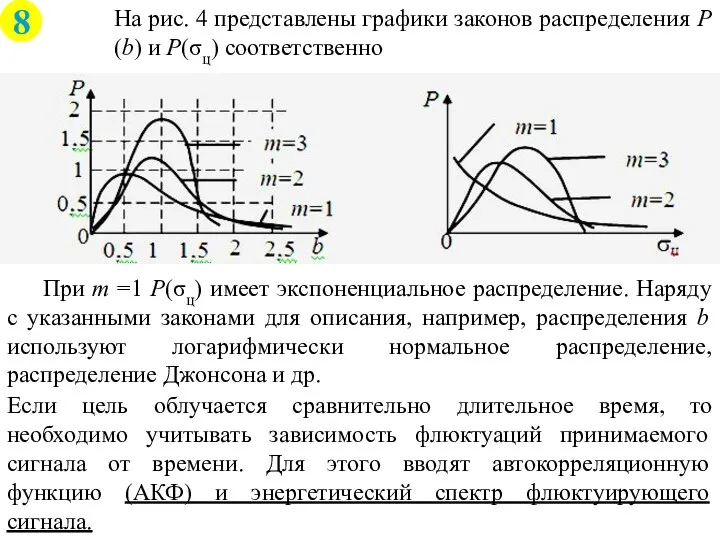
На рис. 4 представлены графики законов распределения Р(b) и Р(σц) соответственно
На рис. 4 представлены графики законов распределения Р(b) и Р(σц) соответственно
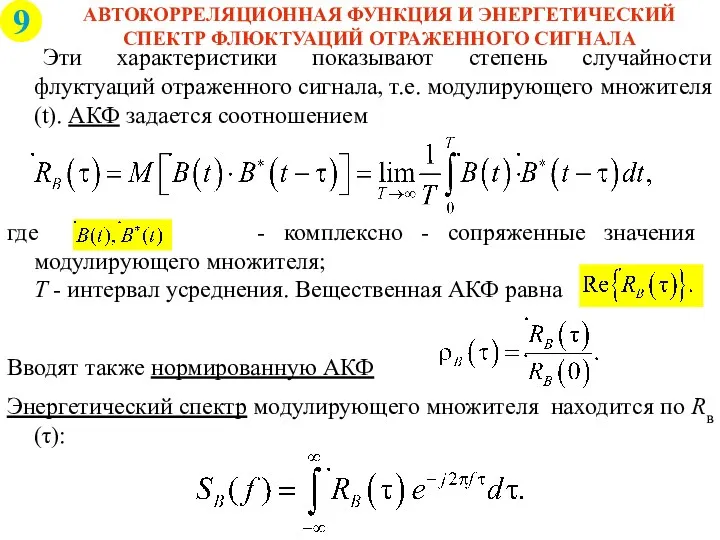
АВТОКОРРЕЛЯЦИОННАЯ ФУНКЦИЯ И ЭНЕРГЕТИЧЕСКИЙ СПЕКТР ФЛЮКТУАЦИЙ ОТРАЖЕННОГО СИГНАЛА
Эти характеристики показывают
АВТОКОРРЕЛЯЦИОННАЯ ФУНКЦИЯ И ЭНЕРГЕТИЧЕСКИЙ СПЕКТР ФЛЮКТУАЦИЙ ОТРАЖЕННОГО СИГНАЛА
Эти характеристики показывают
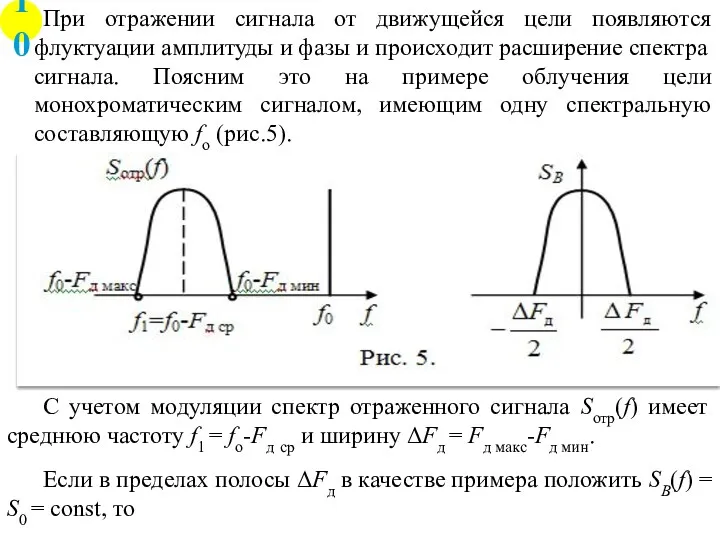
С учетом модуляции спектр отраженного сигнала Sотр(f) имеет среднюю частоту f1
С учетом модуляции спектр отраженного сигнала Sотр(f) имеет среднюю частоту f1
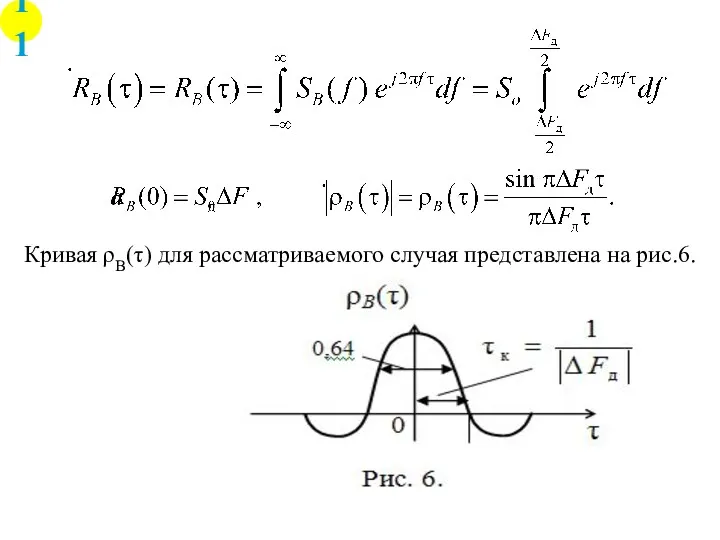
Кривая ρВ(τ) для рассматриваемого случая представлена на рис.6.
11
Кривая ρВ(τ) для рассматриваемого случая представлена на рис.6.
11
Интервал времени, характеризующий ширину пика автокорреляционной функции, например
параметр может быть
Интервал времени, характеризующий ширину пика автокорреляционной функции, например
параметр может быть
Выводы по первому вопросу
1. Таким образом, реальный отраженный сигнал имеет случайные
Выводы по первому вопросу
1. Таким образом, реальный отраженный сигнал имеет случайные
Вопрос 2
СТАТИСТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ШУМОВ И ПОМЕХ
14
Вопрос 2
СТАТИСТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ШУМОВ И ПОМЕХ
14
Флуктуационная помеха является наиболее распространенной в радиолокации. К ней относятся
Флуктуационная помеха является наиболее распространенной в радиолокации. К ней относятся
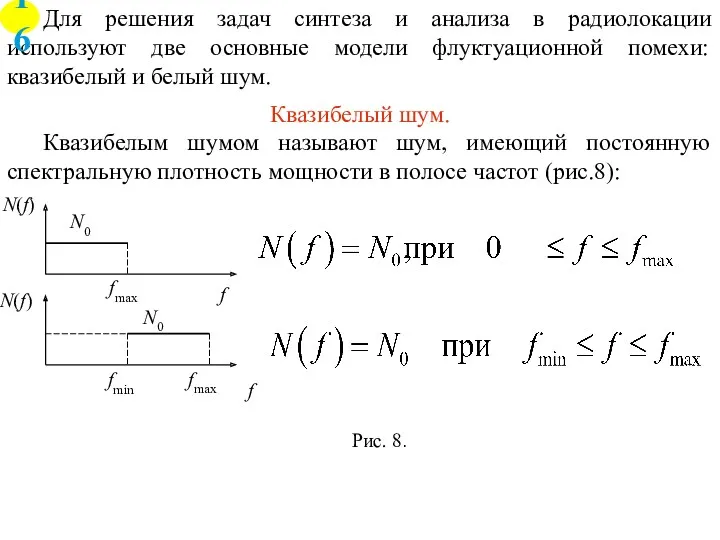
Для решения задач синтеза и анализа в радиолокации используют две основные
Для решения задач синтеза и анализа в радиолокации используют две основные
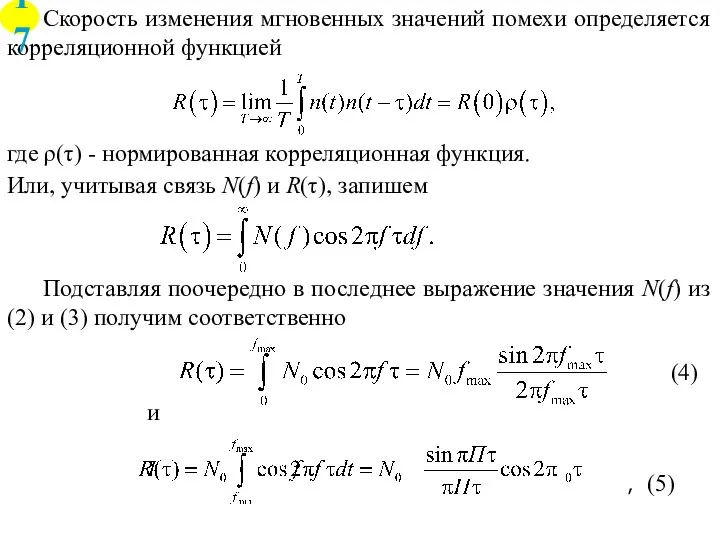
Скорость изменения мгновенных значений помехи определяется корреляционной функцией
где ρ(τ) -
Скорость изменения мгновенных значений помехи определяется корреляционной функцией
где ρ(τ) -
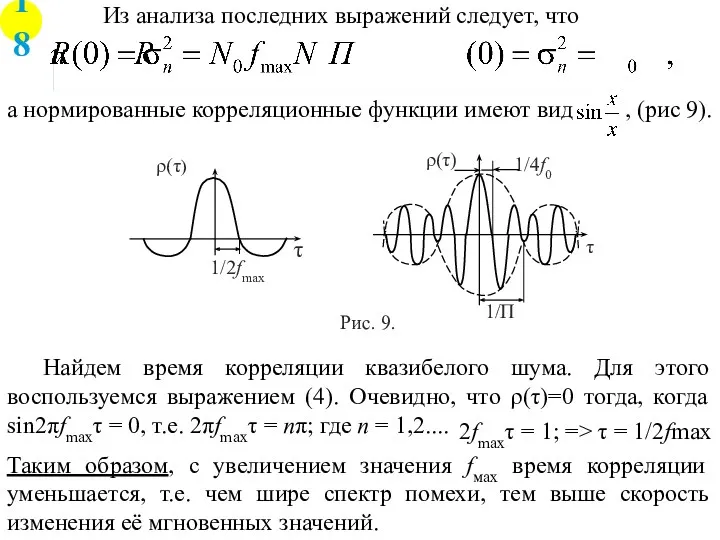
Найдем время корреляции квазибелого шума. Для этого воспользуемся выражением (4). Очевидно,
Найдем время корреляции квазибелого шума. Для этого воспользуемся выражением (4). Очевидно,
Белый шум.
Белым шумом называется модель флуктуационной помехи с постоянной спектральной мощностью
Белый шум.
Белым шумом называется модель флуктуационной помехи с постоянной спектральной мощностью
20
20
Из выражения (6) следует, что белый шум является дельта-коррелированным. Это
Из выражения (6) следует, что белый шум является дельта-коррелированным. Это
В соответствии с теоремой Котельникова
где nk - элемент выборки в
В соответствии с теоремой Котельникова
где nk - элемент выборки в
Замечательным свойством такого представления является то, что коэффициенты разложения ψk(t)
Замечательным свойством такого представления является то, что коэффициенты разложения ψk(t)
В общем случае, используя векторно-матричную запись, плотность вероятности m-элементной выборки нормально
В общем случае, используя векторно-матричную запись, плотность вероятности m-элементной выборки нормально
Выводы по второму вопросу
Таким образом, полной статистической характеристикой колебаний помехи является
Выводы по второму вопросу
Таким образом, полной статистической характеристикой колебаний помехи является
Вопрос 3
СТРУКТУРА И МАТЕМАТИЧЕСКАЯ
МОДЕЛЬ
МЕШАЮЩИХ ОТРАЖЕНИЙ
26
Вопрос 3
СТРУКТУРА И МАТЕМАТИЧЕСКАЯ
МОДЕЛЬ
МЕШАЮЩИХ ОТРАЖЕНИЙ
26
Мешающие отражения обусловлены вторичным излучением поверхностно и объёмно распределенных отражателей, которые
Мешающие отражения обусловлены вторичным излучением поверхностно и объёмно распределенных отражателей, которые
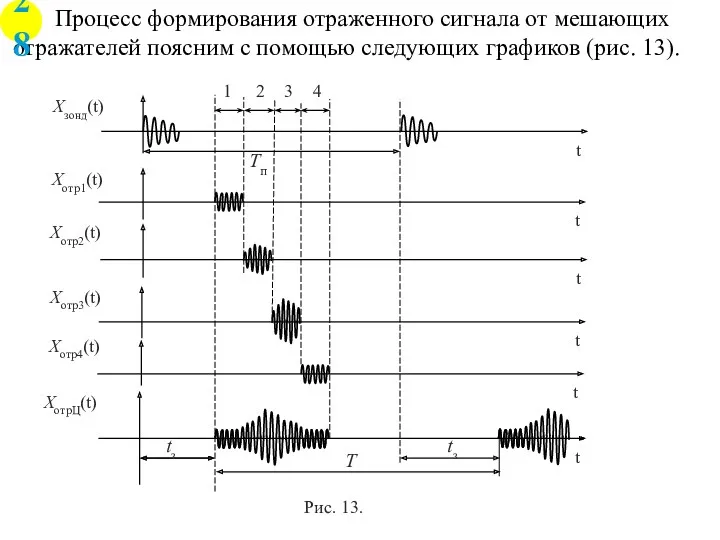
Процесс формирования отраженного сигнала от мешающих
отражателей поясним с помощью
Процесс формирования отраженного сигнала от мешающих
отражателей поясним с помощью
Когда отражатели сосредоточены в отдельных разрешаемых объёмах, помеха носит имитирующий характер,
Когда отражатели сосредоточены в отдельных разрешаемых объёмах, помеха носит имитирующий характер,
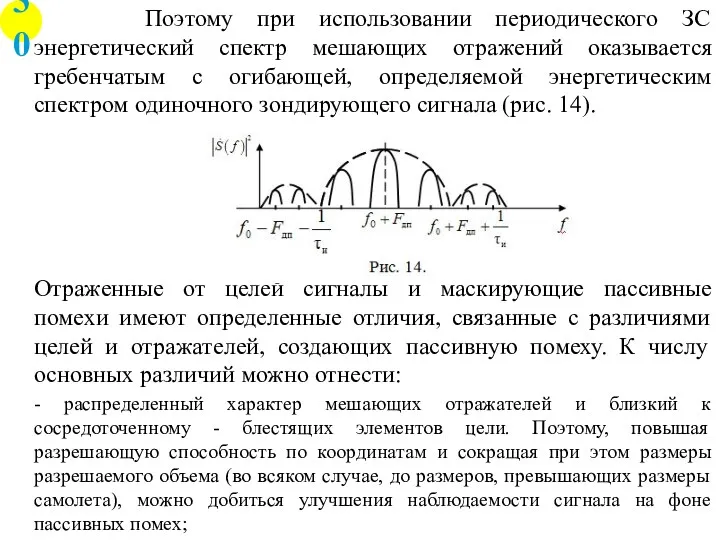
Поэтому при использовании периодического ЗС энергетический спектр мешающих отражений оказывается
Поэтому при использовании периодического ЗС энергетический спектр мешающих отражений оказывается
- различия в скорости перемещения мешающих отражателей и цели. Скорость перемещения
- различия в скорости перемещения мешающих отражателей и цели. Скорость перемещения
Выводы по третьему вопросу
Таким образом, из рассмотрения статистических характеристик мешающих отражений
Выводы по третьему вопросу
Таким образом, из рассмотрения статистических характеристик мешающих отражений
1. При отражении от движущейся блестящей точки зондирующий сигнал претерпевает:
-
1. При отражении от движущейся блестящей точки зондирующий сигнал претерпевает:
-
6. Основными отличиями сигналов от целей и мешающих отражений
являются:
6. Основными отличиями сигналов от целей и мешающих отражений
являются:
 Поощрения и взыскания
Поощрения и взыскания Подготовка, выдача боеприпасов на практические стрельбы
Подготовка, выдача боеприпасов на практические стрельбы Рулевой привод ЗУР 9М39
Рулевой привод ЗУР 9М39 Правовой статус военнослужащих
Правовой статус военнослужащих Воинская обязанность
Воинская обязанность Добовий наряд
Добовий наряд Заняття 2. Лекція 2. Моделювання як процес дослідження систем управління спеціального призначення
Заняття 2. Лекція 2. Моделювання як процес дослідження систем управління спеціального призначення Плаваючий бронетранспортер БТР-4Е
Плаваючий бронетранспортер БТР-4Е Общевоинские уставы Вооруженных Сил РФ — закон воинской жизни
Общевоинские уставы Вооруженных Сил РФ — закон воинской жизни Военная угроза национальной безопасности России
Военная угроза национальной безопасности России Порядок перевірки технічного стану УПО з допомогою пульта контролю ПК і ПОУ-СВ
Порядок перевірки технічного стану УПО з допомогою пульта контролю ПК і ПОУ-СВ Вузол формування інформації, що відображається (ВФВІ)
Вузол формування інформації, що відображається (ВФВІ) Автоматты (пулеметті) бөлшектеу және жинақтау
Автоматты (пулеметті) бөлшектеу және жинақтау Caracteristicile M.L. 9P148 şi instalaţiei de lansare portative 9P135M-1
Caracteristicile M.L. 9P148 şi instalaţiei de lansare portative 9P135M-1 Истребители Великобритании времен Второй мировой войны
Истребители Великобритании времен Второй мировой войны Порядок и содержание работы при приеме дел и должности. (Тема 6. Занятие 2)
Порядок и содержание работы при приеме дел и должности. (Тема 6. Занятие 2) Военная служба. Основы обороны государства
Военная служба. Основы обороны государства Символы ВС РФ. Знамена и ритуалы
Символы ВС РФ. Знамена и ритуалы Военно-патриотическое объединение Высота
Военно-патриотическое объединение Высота Инженерное оборудование и маскировка позиций стрелков
Инженерное оборудование и маскировка позиций стрелков Тема 1. Организация и несение внутренней службы в ВС РФ. Занятие 5. Размещение военнослужащих. Подъем по тревоге
Тема 1. Организация и несение внутренней службы в ВС РФ. Занятие 5. Размещение военнослужащих. Подъем по тревоге Виды оружия на новых физических принципах
Виды оружия на новых физических принципах Предназначение, состав и структура сухопутных войск. Предназначение, состав и структура ВМФ
Предназначение, состав и структура сухопутных войск. Предназначение, состав и структура ВМФ Боеприпасы и ручные гранаты. Патроны к стрелковому оружию и гранатометные выстрелы. (Тема 2.2)
Боеприпасы и ручные гранаты. Патроны к стрелковому оружию и гранатометные выстрелы. (Тема 2.2) Действия солдата, отделения в бою
Действия солдата, отделения в бою Основы стрельбы из стрелкового оружия
Основы стрельбы из стрелкового оружия Заповеди кадетского товарищества
Заповеди кадетского товарищества Воинские символы и ритуалы
Воинские символы и ритуалы