Тема №2. Автоматизация вторичной обработки РЛИ. Занятие №12. Стробирование координатных точек презентация
- Тема №2. Автоматизация вторичной обработки РЛИ. Занятие №12. Стробирование координатных точек

Содержание
- 2. Учебные вопросы: 1. Факторы, определяющие форму и размеры строба. 2. Методы стробирования координатных точек. 2
- 3. СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Литература В.Н. Ратушняк, С.В. Бейльман, И.В. Тяпкин. Основы обработки и передачи информации в
- 4. Учебный вопрос №1 Факторы, определяющие форму и размеры строба. 4
- 5. Стробирование координатных точек При высоком качестве селекции потока входных данных обеспечивается независимое сопровождение произвольного числа траекторий.
- 6. В процессе её выполнения решается одноименная задача, которая формулируется следующим образом: 1. Пусть траектория ЛО представлена
- 7. Рис. 1. Отбор КТ и их привязка к траекториям 7
- 8. Как видно из рис. 1, отбор КТ и их привязка к траекториям осуществляется на основе сравнения
- 9. Координатные точки, достаточно удаленные от экстраполяционной точки, не могут принадлежать к анализируемой траектории. Поэтому для уменьшения
- 10. Факторы, определяющие форму и размеры строба В общем виде операция стробирования координатных точек сводится к проверке
- 11. Согласно соотношению (1), стробирование предусматривает: определение области вероятного нахождения истинной КТ анализируемой траектории, т. е. расчет
- 12. Первым фактором, определяющим область стробирования, являются погрешности измерения координат. Вероятный разброс измеренных координат относительно их истинных
- 13. Рис. 2. Анализ параметров строба 14
- 14. Размеры полуосей эллипса определяются среднеквадратическими погрешностями измерения азимута (σβ) и дальности (σr): a1=krσβ; b1=kσr, где r
- 15. Однако совпадение не означает отсутствия погрешностей экстраполяции. Поэтому вторым фактором, влияющим на форму и размеры строба,
- 16. Значения полуосей данного эллипса пропорциональны среднеквадратическим ошибкам экстраполяции координат: a2=kσxnэ; b2=kσynэ . В процессе устойчивого сопровождения
- 17. На участке маневра математические ожидания экстраполированных координат [M{Xnэ}, M{Ynэ}] отличаются от истинных [X(a,tn), Y(b,tn)] на значения
- 18. Итог проведенного анализа показывает, что область стробирования КТ, учитывающая погрешности измерения и экстраполяции координат, находят путем
- 19. В общем случае (рис. 2, а, б, в) ориентация осей исходных эллипсов различна. Поэтому направления полуосей
- 20. Учебный вопрос №2 Методы стробирования координатных точек. 21
- 21. Оптимальное (эллиптическое) стробирование, требующее оценки значительного числа случайных параметров, практически не реализуемо ни аппаратными, ни программными
- 22. В большинстве случаев область стробирования в плоскости ограничивается сторонами прямоугольника или окружностью. Центр строба задается экстраполированными
- 23. Максимальная динамическая ошибка RД.макс зависит от маневренных возможностей цели, а также продолжительности процессов обнаружения маневра и
- 24. Рис. 3. Практически реализуемые типы стробов 25
- 25. Поскольку площадь прямоугольного строба где 2Rrстр, 2Rβстр ‒ линейные размеры строба, а площадь эллиптического строба Sэп=πab,
- 26. При стробировании в прямоугольной системе координат граница строба в горизонтальной плоскости нередко задается окружностью радиуса Rстр
- 27. При формировании кругового строба его радиус Rстр определяется суммой больших полуосей эллипсов погрешностей измерения, экстраполяции и
- 28. При ограниченной производительности ЭВМ, реализующей вторичную обработку РЛИ, используют простейший метод стробирования, при котором размеры стробов
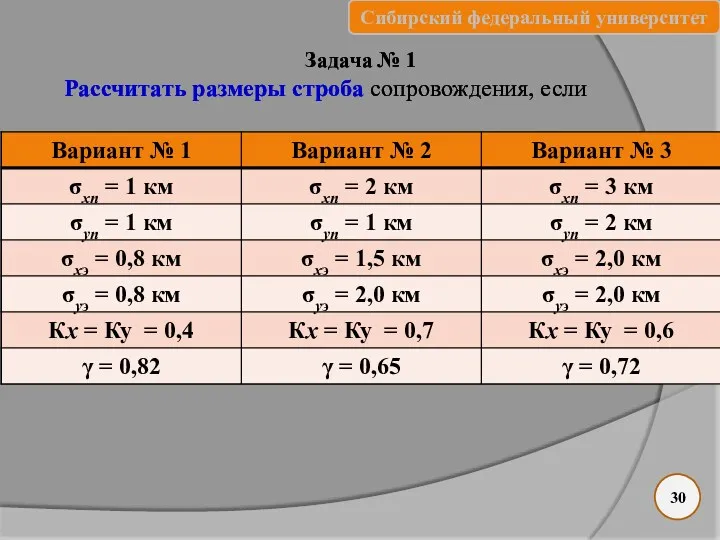
- 29. 30 Задача № 1 Рассчитать размеры строба сопровождения, если
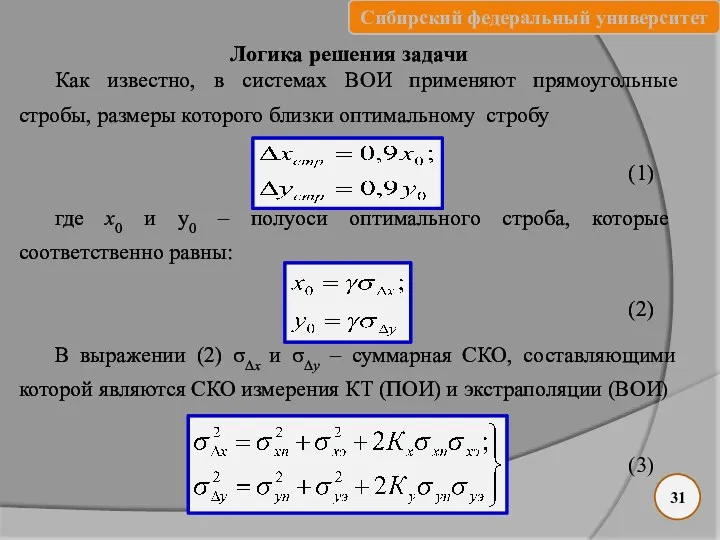
- 30. 31 Логика решения задачи Как известно, в системах ВОИ применяют прямоугольные стробы, размеры которого близки оптимальному
- 31. 32 Х y0 х0 Y Последовательность решения задачи В соответствии с выражением (3) необходимо найти значение
- 32. 33 Подставляя в выражение (2) значения суммарных СКО σ∆х и σ∆у, определяем значения размеров полуосей х0
- 33. 34 Задача № 2 В чем заключается сущность методов минимальных эллиптических отклонений и наименьших расстояний?
- 34. 35 Сущность метода минимальных эллиптических отклонений состоит в вычислении для каждой из КТ, попавших в строб,
- 35. Вопросы для самоконтроля 1. С какой целью выполняется селекция траекторий? 2. На какие этапы и почему
- 37. Скачать презентацию
Учебные вопросы:
1. Факторы, определяющие форму и размеры строба.
2. Методы стробирования координатных
Учебные вопросы:
1. Факторы, определяющие форму и размеры строба.
2. Методы стробирования координатных
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Литература
В.Н. Ратушняк, С.В. Бейльман, И.В. Тяпкин. Основы обработки и
СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ
Литература
В.Н. Ратушняк, С.В. Бейльман, И.В. Тяпкин. Основы обработки и
Учебный вопрос №1
Факторы, определяющие форму и размеры строба.
4
Учебный вопрос №1
Факторы, определяющие форму и размеры строба.
4
Стробирование координатных точек
При высоком качестве селекции потока входных данных обеспечивается независимое
Стробирование координатных точек
При высоком качестве селекции потока входных данных обеспечивается независимое
В процессе её выполнения решается одноименная задача, которая формулируется следующим образом:
1.
В процессе её выполнения решается одноименная задача, которая формулируется следующим образом:
1.
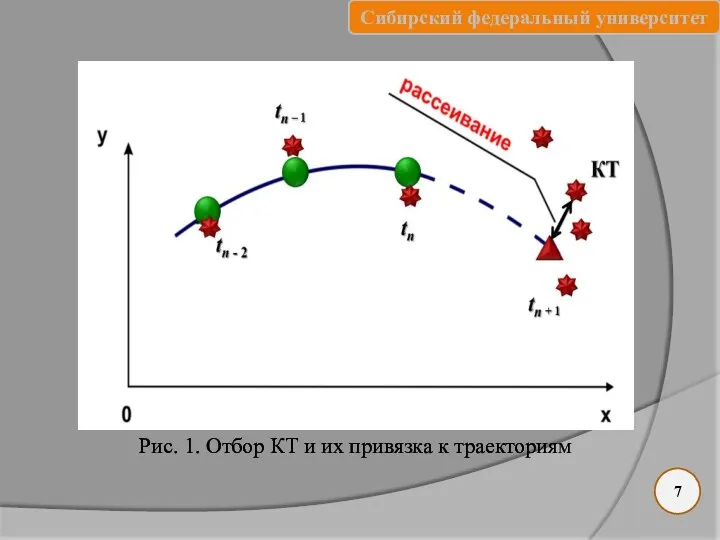
Рис. 1. Отбор КТ и их привязка к траекториям
7
Рис. 1. Отбор КТ и их привязка к траекториям
7
Как видно из рис. 1, отбор КТ и их привязка к
Как видно из рис. 1, отбор КТ и их привязка к
Координатные точки, достаточно удаленные от экстраполяционной точки, не могут принадлежать к
Координатные точки, достаточно удаленные от экстраполяционной точки, не могут принадлежать к
Факторы, определяющие форму и размеры строба
В общем виде операция стробирования координатных
Факторы, определяющие форму и размеры строба
В общем виде операция стробирования координатных
Согласно соотношению (1), стробирование предусматривает:
определение области вероятного нахождения истинной КТ анализируемой
Согласно соотношению (1), стробирование предусматривает:
определение области вероятного нахождения истинной КТ анализируемой
Первым фактором, определяющим область стробирования, являются погрешности измерения координат. Вероятный разброс
Первым фактором, определяющим область стробирования, являются погрешности измерения координат. Вероятный разброс
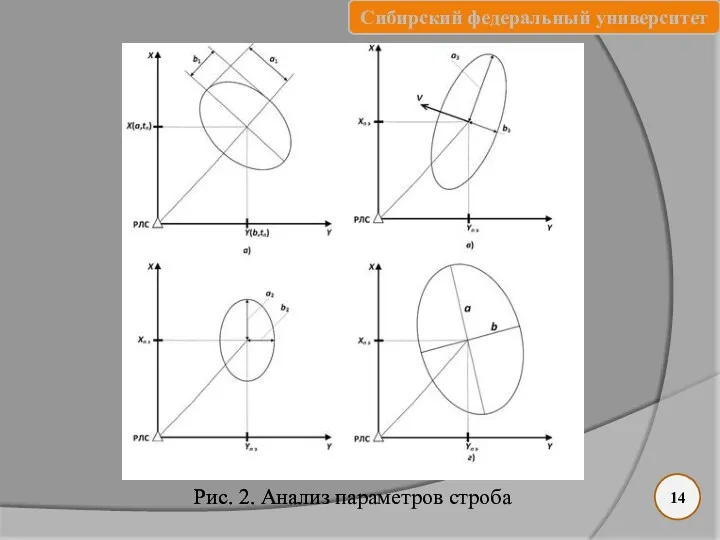
Рис. 2. Анализ параметров строба
14
Рис. 2. Анализ параметров строба
14
Размеры полуосей эллипса определяются среднеквадратическими погрешностями измерения азимута (σβ) и дальности
Размеры полуосей эллипса определяются среднеквадратическими погрешностями измерения азимута (σβ) и дальности
Однако совпадение не означает отсутствия погрешностей экстраполяции. Поэтому вторым фактором, влияющим
Однако совпадение не означает отсутствия погрешностей экстраполяции. Поэтому вторым фактором, влияющим
Значения полуосей данного эллипса пропорциональны среднеквадратическим ошибкам экстраполяции координат:
a2=kσxnэ;
b2=kσynэ .
В
Значения полуосей данного эллипса пропорциональны среднеквадратическим ошибкам экстраполяции координат:
a2=kσxnэ;
b2=kσynэ .
В
![На участке маневра математические ожидания экстраполированных координат [M{Xnэ}, M{Ynэ}] отличаются](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/588089/slide-16.jpg)
На участке маневра математические ожидания экстраполированных координат [M{Xnэ}, M{Ynэ}] отличаются от
На участке маневра математические ожидания экстраполированных координат [M{Xnэ}, M{Ynэ}] отличаются от
Итог проведенного анализа показывает, что область стробирования КТ, учитывающая погрешности измерения
Итог проведенного анализа показывает, что область стробирования КТ, учитывающая погрешности измерения
В общем случае (рис. 2, а, б, в) ориентация осей исходных
В общем случае (рис. 2, а, б, в) ориентация осей исходных
Учебный вопрос №2
Методы стробирования координатных точек.
21
Учебный вопрос №2
Методы стробирования координатных точек.
21
Оптимальное (эллиптическое) стробирование, требующее оценки значительного числа случайных параметров, практически не
Оптимальное (эллиптическое) стробирование, требующее оценки значительного числа случайных параметров, практически не
В большинстве случаев область стробирования в плоскости ограничивается сторонами прямоугольника или
В большинстве случаев область стробирования в плоскости ограничивается сторонами прямоугольника или
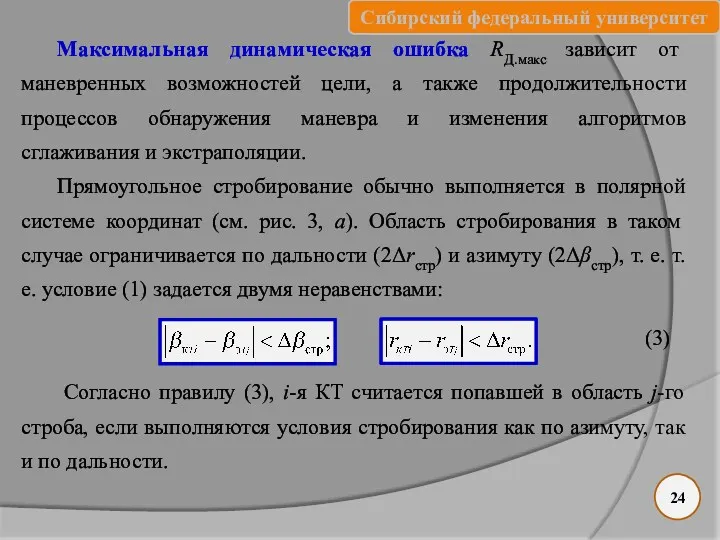
Максимальная динамическая ошибка RД.макс зависит от маневренных возможностей цели, а также
Максимальная динамическая ошибка RД.макс зависит от маневренных возможностей цели, а также
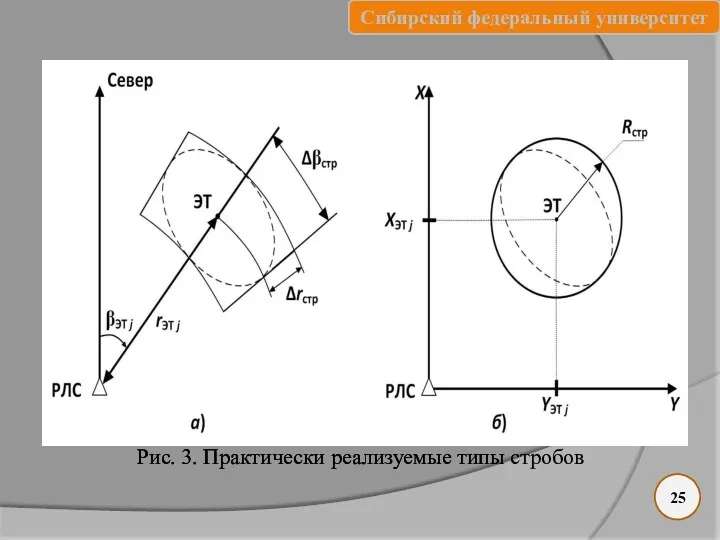
Рис. 3. Практически реализуемые типы стробов
25
Рис. 3. Практически реализуемые типы стробов
25
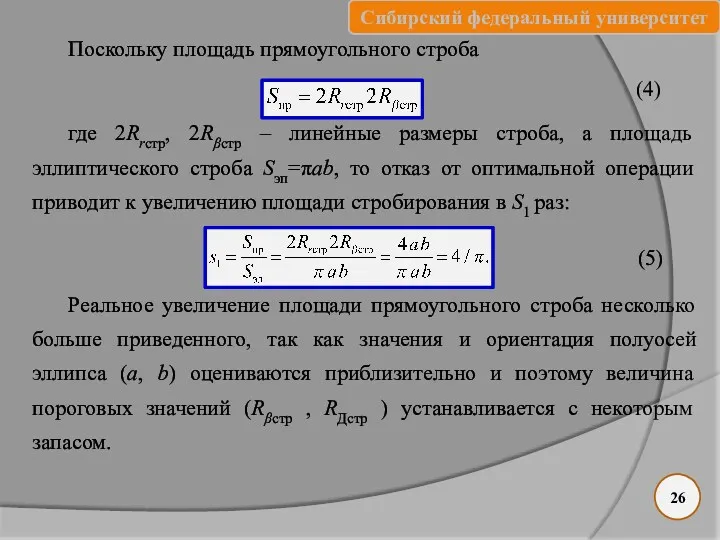
Поскольку площадь прямоугольного строба
где 2Rrстр, 2Rβстр ‒ линейные размеры строба, а
Поскольку площадь прямоугольного строба
где 2Rrстр, 2Rβстр ‒ линейные размеры строба, а
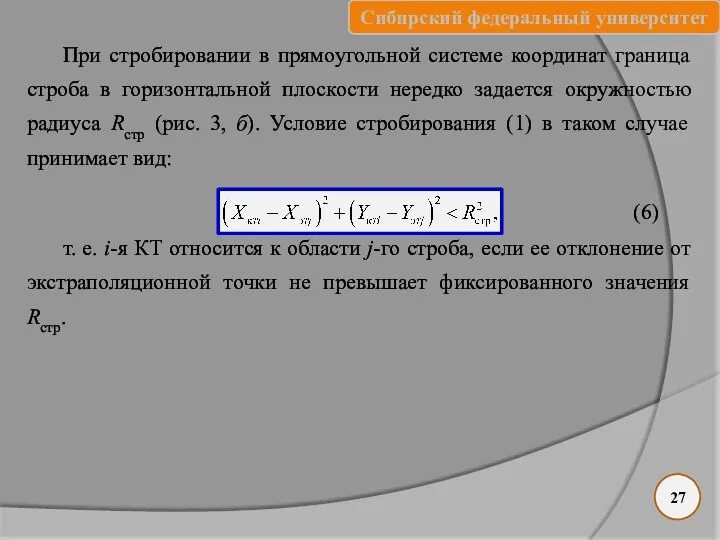
При стробировании в прямоугольной системе координат граница строба в горизонтальной плоскости
При стробировании в прямоугольной системе координат граница строба в горизонтальной плоскости
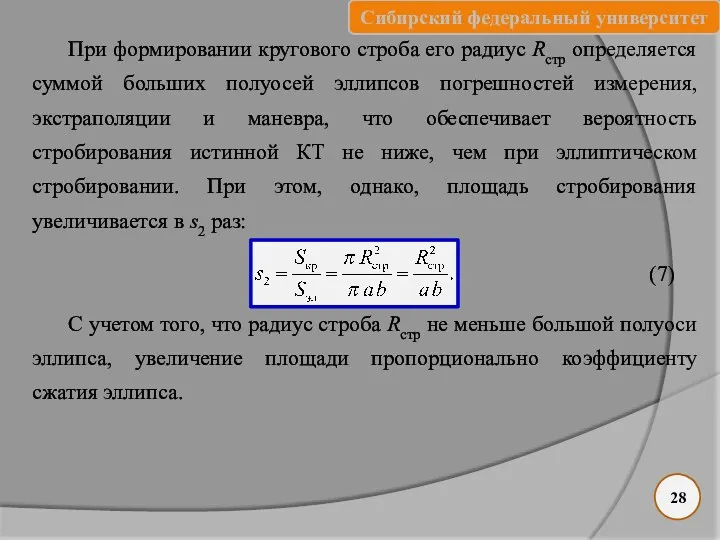
При формировании кругового строба его радиус Rстр определяется суммой больших полуосей
При формировании кругового строба его радиус Rстр определяется суммой больших полуосей
При ограниченной производительности ЭВМ, реализующей вторичную обработку РЛИ, используют простейший метод
При ограниченной производительности ЭВМ, реализующей вторичную обработку РЛИ, используют простейший метод
30
Задача № 1
Рассчитать размеры строба сопровождения, если
30
Задача № 1
Рассчитать размеры строба сопровождения, если
31
Логика решения задачи
Как известно, в системах ВОИ применяют прямоугольные стробы, размеры
31
Логика решения задачи
Как известно, в системах ВОИ применяют прямоугольные стробы, размеры
32
Х
y0
х0
Y
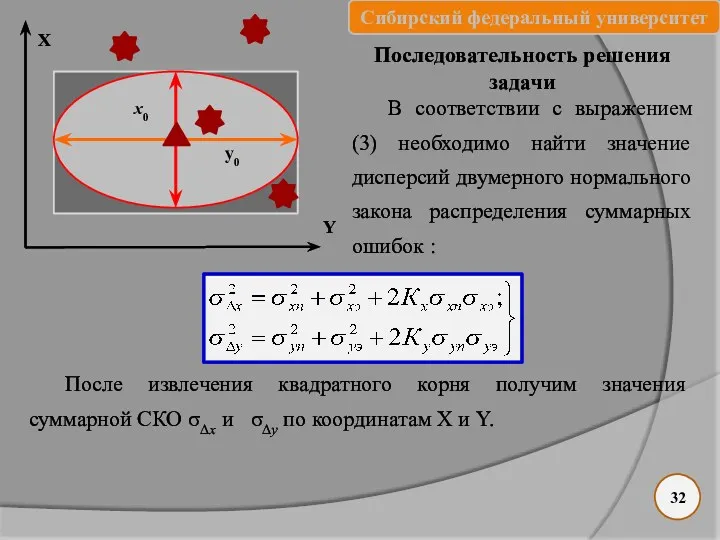
Последовательность решения задачи
В соответствии с выражением (3) необходимо найти значение дисперсий
32
Х
y0
х0
Y
Последовательность решения задачи
В соответствии с выражением (3) необходимо найти значение дисперсий
33
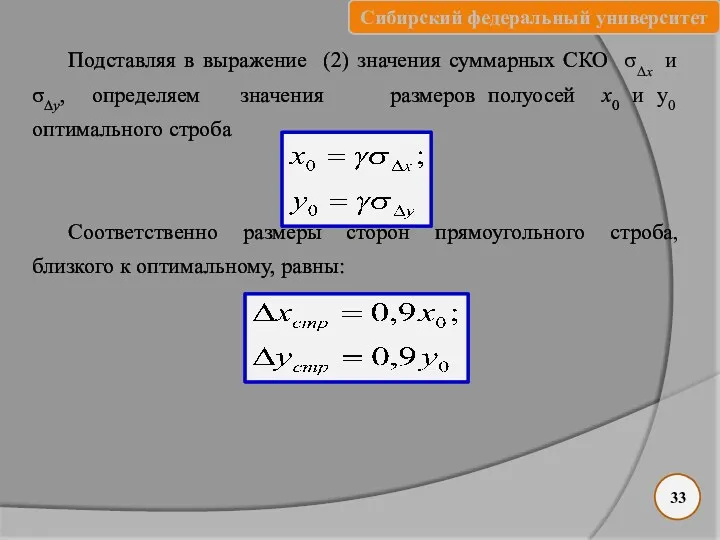
Подставляя в выражение (2) значения суммарных СКО σ∆х и σ∆у, определяем
33
Подставляя в выражение (2) значения суммарных СКО σ∆х и σ∆у, определяем
34
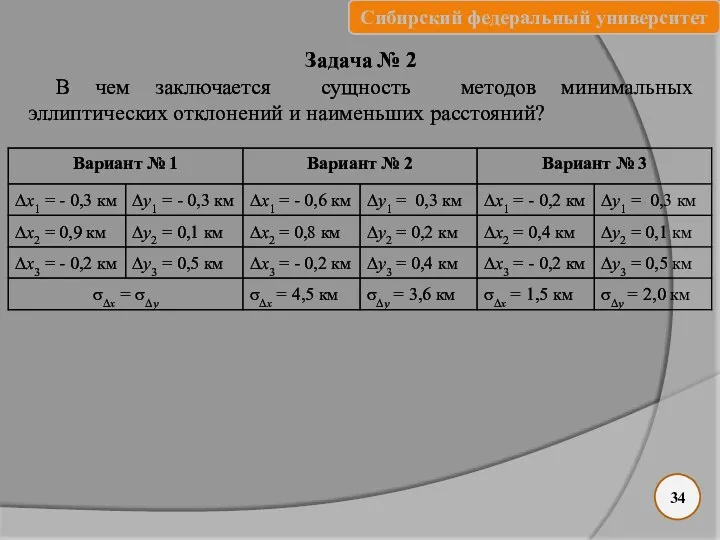
Задача № 2
В чем заключается сущность методов минимальных эллиптических отклонений и
34
Задача № 2
В чем заключается сущность методов минимальных эллиптических отклонений и
35
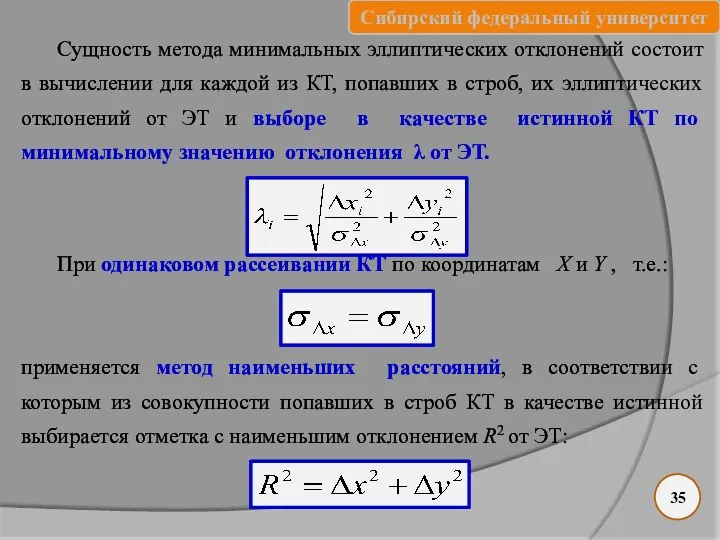
Сущность метода минимальных эллиптических отклонений состоит в вычислении для каждой из
35
Сущность метода минимальных эллиптических отклонений состоит в вычислении для каждой из
Вопросы для самоконтроля
1. С какой целью выполняется селекция траекторий?
2. На какие
Вопросы для самоконтроля
1. С какой целью выполняется селекция траекторий?
2. На какие
 Приведення стрілецької зброї до нормального бою
Приведення стрілецької зброї до нормального бою Основы современного общевойскового боя. Основные тактические понятия, определения и термины
Основы современного общевойскового боя. Основные тактические понятия, определения и термины Корабельный устав
Корабельный устав Слайды - Военно-экономическое обечпечение обороны РФ
Слайды - Военно-экономическое обечпечение обороны РФ История создания Вооруженных сил РФ
История создания Вооруженных сил РФ Вибухова справа. Підривні заряди. Заряди спеціального призначення. (Тема 3.5)
Вибухова справа. Підривні заряди. Заряди спеціального призначення. (Тема 3.5) Виды Вооруженных Сил РФ. Рода войск
Виды Вооруженных Сил РФ. Рода войск Качества личности военнослужащего как защитника Отечества
Качества личности военнослужащего как защитника Отечества Қазақстан Республикасы Қарулы Күштерінің тәртіптік жарғысы
Қазақстан Республикасы Қарулы Күштерінің тәртіптік жарғысы Регулирование усиления в приёмных устройствах РЛС
Регулирование усиления в приёмных устройствах РЛС Л 2 Т 2 З 1Бой
Л 2 Т 2 З 1Бой Апаратура робочого місця
Апаратура робочого місця Действия солдата, отделения в бою
Действия солдата, отделения в бою Теоретичні основи побудови артилерійського озброєння. Механізми наведення
Теоретичні основи побудови артилерійського озброєння. Механізми наведення Будова основних зразків артилерійського озброєння. Лафет
Будова основних зразків артилерійського озброєння. Лафет Определение потребности в горючем на год для воинской части. (Тема 3.2)
Определение потребности в горючем на год для воинской части. (Тема 3.2) История автомата Калашникова АК - 47
История автомата Калашникова АК - 47 Назначение и боевые свойства автомата Калашникова
Назначение и боевые свойства автомата Калашникова Информационно-аналитические материалы по робототехническим комплексам и технологиям робототехники
Информационно-аналитические материалы по робототехническим комплексам и технологиям робототехники Основные положения по организации и технологии войскового ремонта танка Т-72. Ремонт танков
Основные положения по организации и технологии войскового ремонта танка Т-72. Ремонт танков Краткие сведения из внутренней баллистики. (Тема 2)
Краткие сведения из внутренней баллистики. (Тема 2) Вид боевого обеспечения - охранение
Вид боевого обеспечения - охранение Общие положения по эксплуатации и сбережению вещевого имущества в воинской части
Общие положения по эксплуатации и сбережению вещевого имущества в воинской части Основы инженерного оборудования позиции, опорного пункта. Занятие №2
Основы инженерного оборудования позиции, опорного пункта. Занятие №2 Воинская дисциплина, ее сущность и значение
Воинская дисциплина, ее сущность и значение Методическая система подготовки офицеров как руководителей обучения военнослужащих и пути совершенствования этой системы
Методическая система подготовки офицеров как руководителей обучения военнослужащих и пути совершенствования этой системы Международная (миротворческая) деятельность Вооруженных Сил Российской Федерации
Международная (миротворческая) деятельность Вооруженных Сил Российской Федерации Суточный наряд. Общие положения о суточном наряде
Суточный наряд. Общие положения о суточном наряде