- Геометрия в 3D-пространстве

Содержание
- 2. КООРДИНАТЫ ТОЧКИ В трехмерном пространстве положение каждой точки задается набором из 3 вещественных чисел – координат
- 3. ДЕКАРТОВА СК
- 4. СФЕРИЧЕСКИЕ КООРДИНАТЫ Сферические координаты являются обобщением полярных координат на случай трехмерного пространства, получаемого путем добавления еще
- 5. СФЕРИЧЕСКАЯ СК
- 6. ВЗАИМОСВЯЗЬ ДЕКАРТОВЫХ И СФЕРИЧЕСКИХ КООРДИНАТ ТОЧКИ
- 7. ОБЪЕКТЫ КОНЕЧНЫХ РАЗМЕРОВ Для описания объектов конечных размеров с объектом, как и в двумерном случае, связывают
- 8. ОРИЕНТАЦИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ Ориентация объекта в пространстве определяется ориентацией осей объектной системы координат относительно осей
- 9. ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ Наиболее часто используется способ, предложенный в 1748 году Леонардом Эйлером, а соответствующий
- 10. ЭЙЛЕРОВЫ УГЛЫ Согласно Эйлеру для этого необходимо выполнить следующую последовательность поворотов поворот вокруг оси Z’ на
- 11. ЭЙЛЕРОВЫ УГЛЫ поворот вокруг оси X’’ на угол θ, называемый углом нутации, такой, чтобы ось Z’
- 12. ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
- 13. ФОРМУЛЫ ПРЕОБРАЗОВАНИЙ Преобразование координат Матрица поворота
- 14. ОБЛАСТЬ ПРИМЕНЕНИЯ ЭЙЛЕРОВЫХ УГЛОВ Эйлеровы углы традиционно используются в механике для задания ориентации твердого тела в
- 15. АФФИННЫЕ ПРЕОБРАЗОВАНИЯ В трехмерном пространстве (3D) положение точки может быть задано в однородных координатах p(x, y,
- 16. МАТРИЦЫ ВРАЩЕНИЯ Вращение на угол φ вокруг оси абсцисс: Rx(φ) = Rx(φ) =
- 17. МАТРИЦЫ ВРАЩЕНИЯ Вращение на угол ψ вокруг оси ординат: Ry(ψ) =
- 18. МАТРИЦЫ ВРАЩЕНИЯ Вращение на угол χ вокруг оси аппликат : Rz(χ) =
- 19. ПРОЧИЕ МАТРИЦЫ Матрицы растяжения/сжатия, матрицы отражения относительно координатных плоскостей и матрица перемещения легко могут быть построены
- 20. ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ Так же, как и при использовании эйлеровых углов, совмещение осей объектной системы
- 21. ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ Математически такой поворот описывается следующей матричной операцией: (x’’, y’’, z’’, 1) =
- 22. ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ Последний поворот выполняется на некоторый угол χ вокруг оси OZ до совмещения
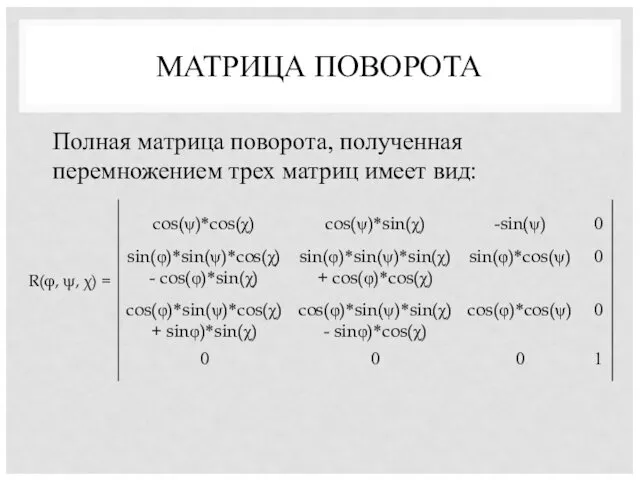
- 23. МАТРИЦА ПОВОРОТА Полная матрица поворота, полученная перемножением трех матриц имеет вид: R(φ, ψ, χ) =
- 24. АЛГОРИТМЫ ПРОЕЦИРОВАНИЯ
- 25. ЗАДАЧА ПРОЕЦИРОВАНИЯ Отображение некоторого множества точек S пространства Rn на другое пространство Rm той же или
- 26. ПОСТРОЕНИЕ ПРОЕКЦИЙ Для построения проекции выбирается некоторая точка – центр проецирования – и плоскость проецирования или
- 27. ВИДЫ ПРОЕКЦИЙ Если в качестве центра проецирования выбирается собственная точка пространства R3, то проекция называется центральной
- 28. ВИДЫ ПАРАЛЛЕЛЬНЫХ ПРОЕКЦИЙ В зависимости от расположения картинной плоскости и координатных осей параллельные проекции делятся на
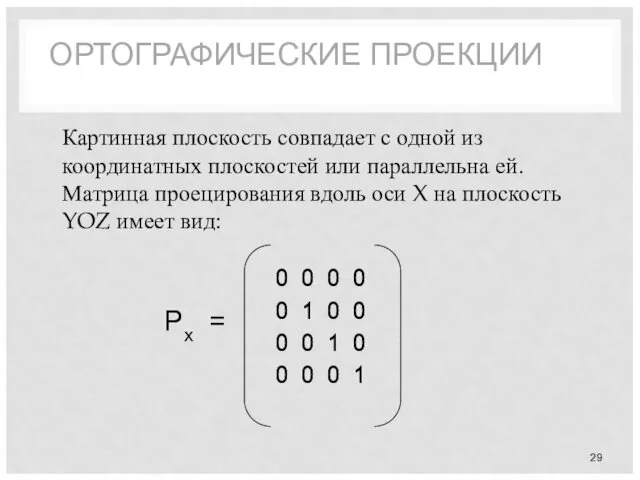
- 29. ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ Картинная плоскость совпадает с одной из координатных плоскостей или параллельна ей. Матрица проецирования вдоль
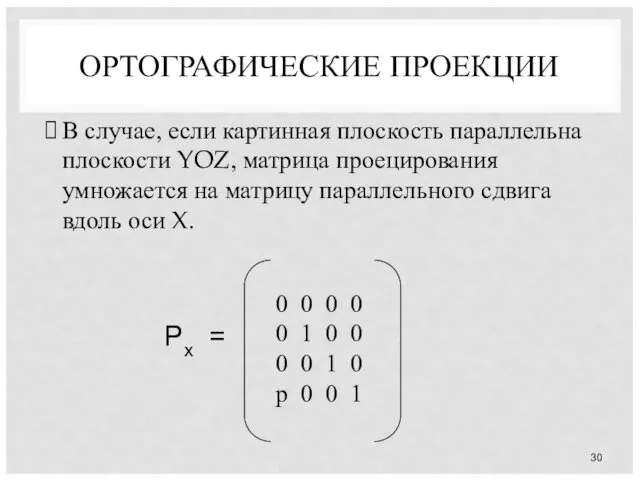
- 30. ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ В случае, если картинная плоскость параллельна плоскости YOZ, матрица проецирования умножается на матрицу параллельного
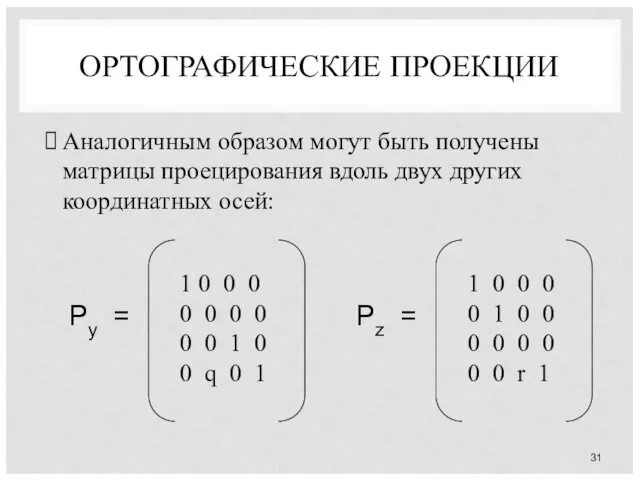
- 31. ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ Аналогичным образом могут быть получены матрицы проецирования вдоль двух других координатных осей:
- 32. ВЫРОЖДЕННОСТЬ МАТРИЦ Матрицы проецирования являются вырожденными, т.е. проецирование является необратимой операцией Это отражает тот очевидный факт,
- 33. АКСОНОМЕТРИЧЕСКИЕ ПРОЕКЦИИ При аксонометрической проекции проектирующие прямые также перпендикулярны картинной плоскости, однако сама картинная плоскость ориентирована
- 34. АКСОНОМЕТРИЧЕСКОЕ ПРОЕЦИРОВАНИЕ
- 35. ВИДЫ АКСОНОМЕТРИЧЕСКИХ ПРОЕКЦИЙ В соответствии со взаимным расположением картинной плоскости и координатных осей различают три вида
- 36. ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ Любая аксонометрическая проекция может быть получена комбинацией поворота до совмещения нормали к картинной
- 37. ВЫБОР ПЛОСКОСТИ ПРОЕЦИРОВАНИЯ В дальнейшем мы будем рассматривать фронтальные проекции объектов, то есть в качестве картинной
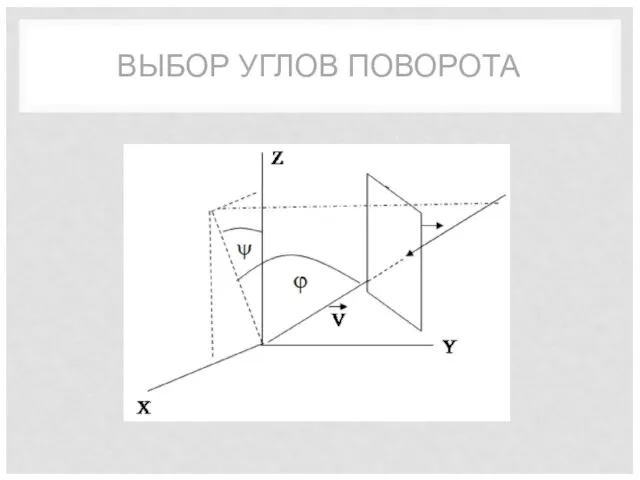
- 38. ВЫБОР УГЛОВ ПОВОРОТА
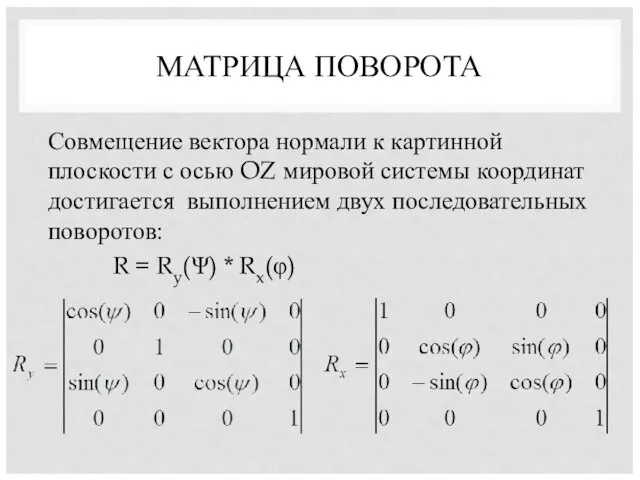
- 39. МАТРИЦА ПОВОРОТА Совмещение вектора нормали к картинной плоскости с осью OZ мировой системы координат достигается выполнением
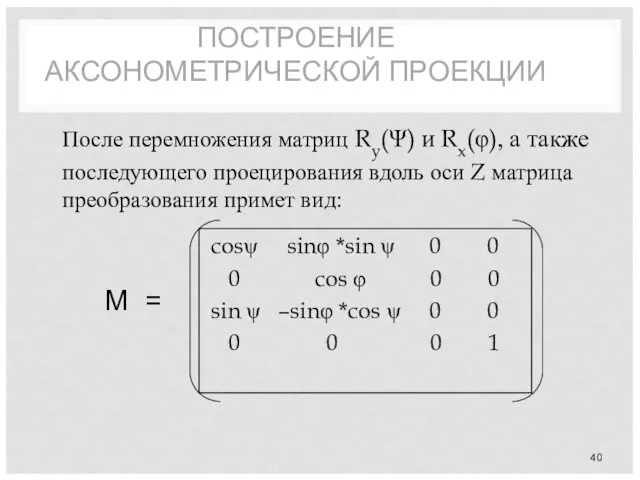
- 40. ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ После перемножения матриц Ry(Ψ) и Rx(φ), а также последующего проецирования вдоль оси Z
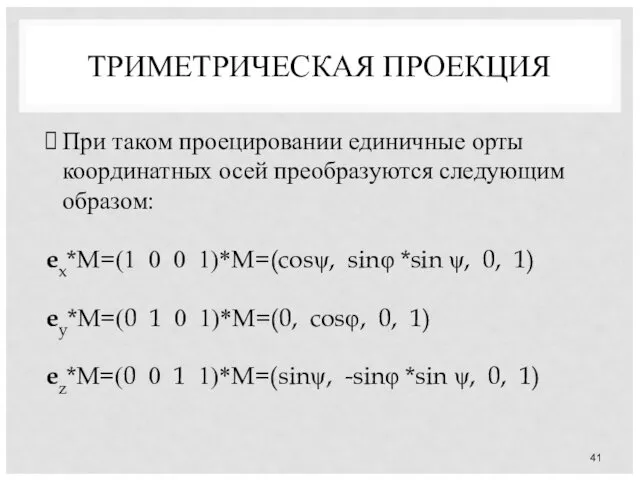
- 41. ТРИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ При таком проецировании единичные орты координатных осей преобразуются следующим образом: ex*M=(1 0 0 1)*M=(cosψ,
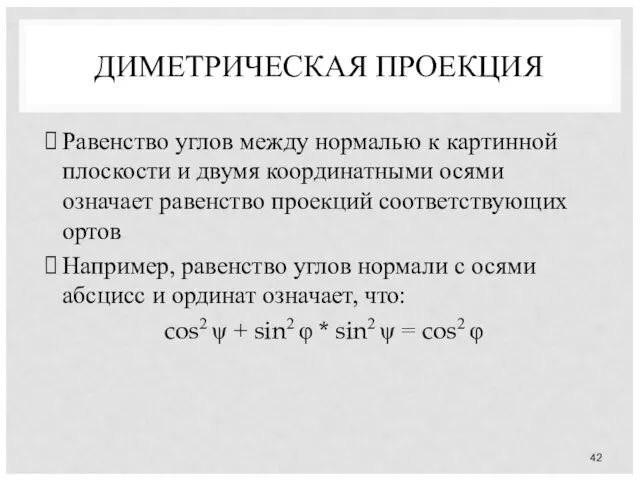
- 42. ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Равенство углов между нормалью к картинной плоскости и двумя координатными осями означает равенство проекций
- 43. ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Отсюда следует, что sin2 ψ = tg2 φ Теперь углы поворота вокруг осей ординат
- 44. ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Аналогичным образом могут быть рассмотрены две другие диметрические проекции, соответствующие другим возможным выборам пар
- 45. СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Тогда из условий sin2 ψ = tg2 φ и cos2 φ = 4*(sin2
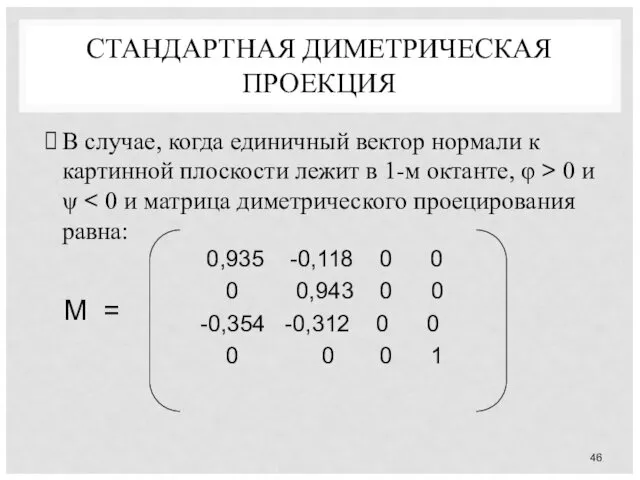
- 46. СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ В случае, когда единичный вектор нормали к картинной плоскости лежит в 1-м октанте,
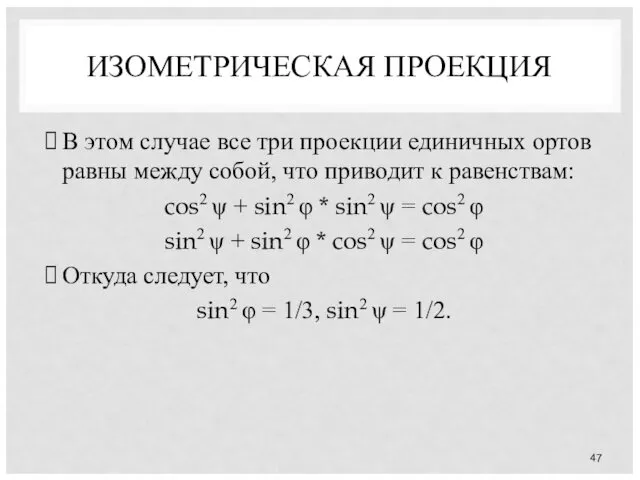
- 47. ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ В этом случае все три проекции единичных ортов равны между собой, что приводит к
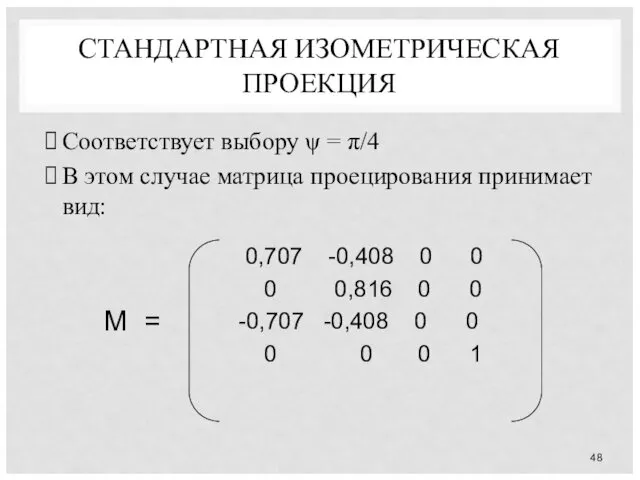
- 48. СТАНДАРТНАЯ ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Соответствует выбору ψ = π/4 В этом случае матрица проецирования принимает вид:
- 49. КОСОУГОЛЬНЫЕ ПРОЕКЦИИ При косоугольном проецировании пучок проецирующих лучей не перпендикулярен картинной плоскости. Косоугольные проекции сочетают в
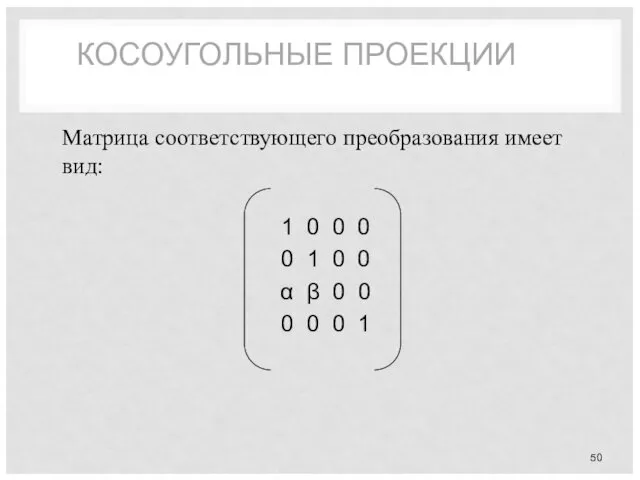
- 50. КОСОУГОЛЬНЫЕ ПРОЕКЦИИ Матрица соответствующего преобразования имеет вид:
- 51. ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ Выделяют два вида косоугольных проекций: свободную, кабинетную. В случае свободной проекции угол наклона
- 52. ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ Кабинетная проекция является частным случаем свободной проекции – масштаб по оси Z вдвое
- 53. ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ Пусть центр проецирования – точка C с координатами (0, 0, c) на оси Z
- 54. ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ Эта прямая пересекается с картинной плоскостью в точке с координатами x0' = c*x0/(c-z0); y0'=
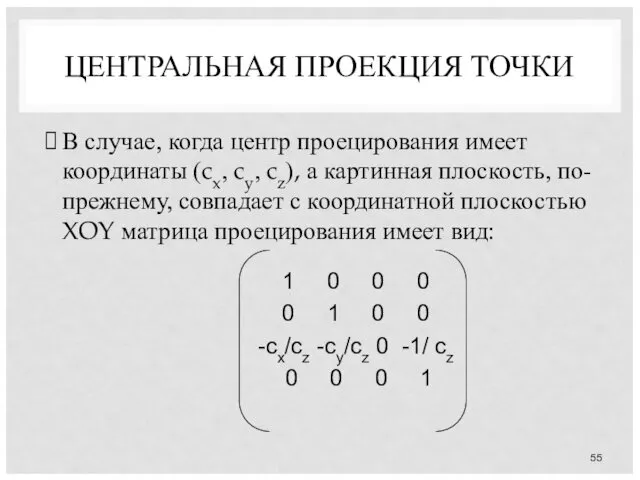
- 55. ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ В случае, когда центр проецирования имеет координаты (cx, cy, cz), а картинная плоскость,
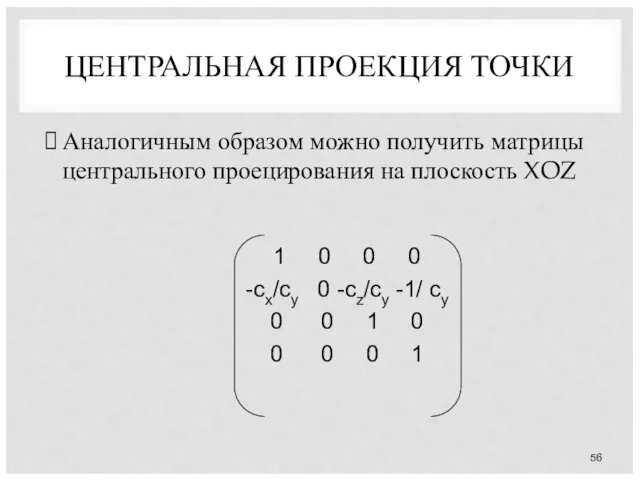
- 56. ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ Аналогичным образом можно получить матрицы центрального проецирования на плоскость XOZ
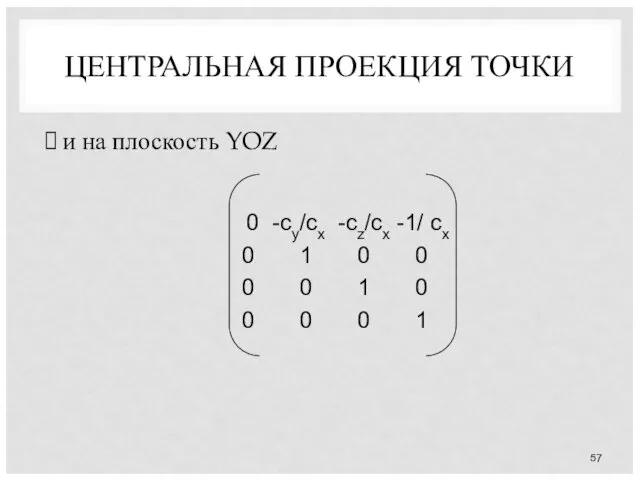
- 57. ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ и на плоскость YOZ
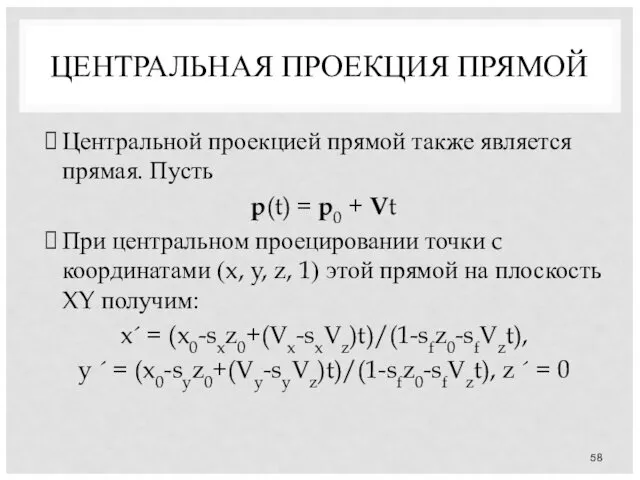
- 58. ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ПРЯМОЙ Центральной проекцией прямой также является прямая. Пусть p(t) = p0 + Vt При
- 60. Скачать презентацию
КООРДИНАТЫ ТОЧКИ
В трехмерном пространстве положение каждой точки задается набором из
КООРДИНАТЫ ТОЧКИ
В трехмерном пространстве положение каждой точки задается набором из
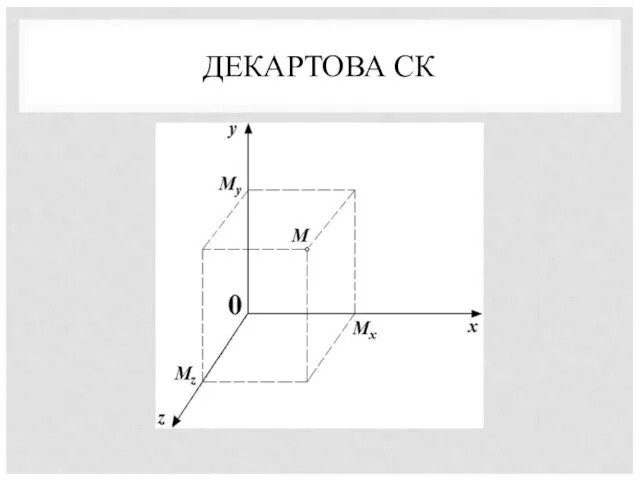
ДЕКАРТОВА СК
ДЕКАРТОВА СК
СФЕРИЧЕСКИЕ КООРДИНАТЫ
Сферические координаты являются обобщением полярных координат на случай трехмерного
СФЕРИЧЕСКИЕ КООРДИНАТЫ
Сферические координаты являются обобщением полярных координат на случай трехмерного
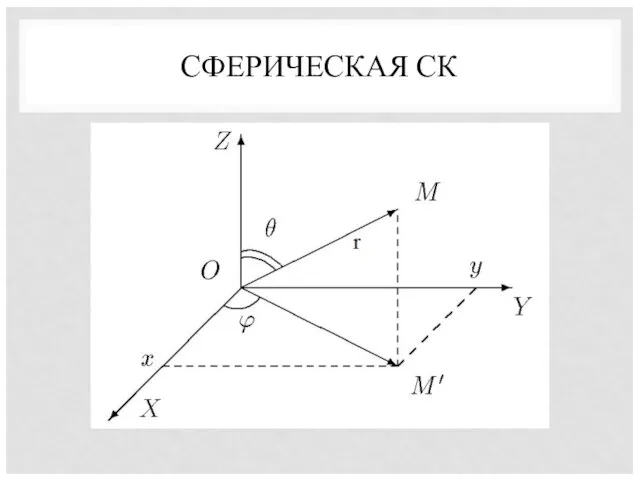
СФЕРИЧЕСКАЯ СК
СФЕРИЧЕСКАЯ СК
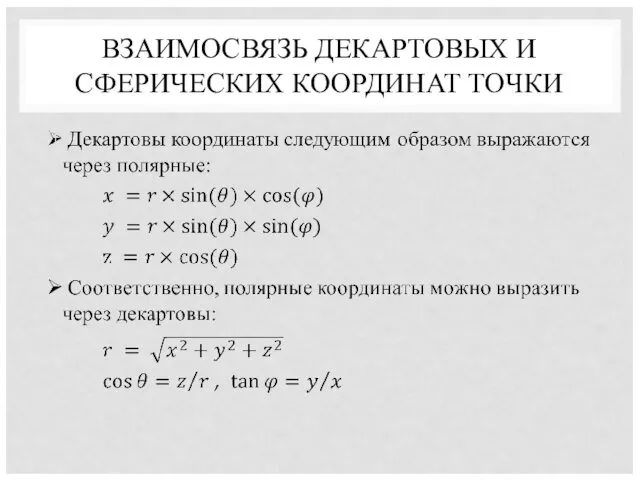
ВЗАИМОСВЯЗЬ ДЕКАРТОВЫХ И СФЕРИЧЕСКИХ КООРДИНАТ ТОЧКИ
ВЗАИМОСВЯЗЬ ДЕКАРТОВЫХ И СФЕРИЧЕСКИХ КООРДИНАТ ТОЧКИ
ОБЪЕКТЫ КОНЕЧНЫХ РАЗМЕРОВ
Для описания объектов конечных размеров с объектом, как
ОБЪЕКТЫ КОНЕЧНЫХ РАЗМЕРОВ
Для описания объектов конечных размеров с объектом, как
ОРИЕНТАЦИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ
Ориентация объекта в пространстве определяется ориентацией осей объектной
ОРИЕНТАЦИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ
Ориентация объекта в пространстве определяется ориентацией осей объектной
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Наиболее часто используется способ, предложенный в 1748 году
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Наиболее часто используется способ, предложенный в 1748 году
ЭЙЛЕРОВЫ УГЛЫ
Согласно Эйлеру для этого необходимо выполнить следующую последовательность поворотов
поворот вокруг
ЭЙЛЕРОВЫ УГЛЫ
Согласно Эйлеру для этого необходимо выполнить следующую последовательность поворотов
поворот вокруг
ЭЙЛЕРОВЫ УГЛЫ
поворот вокруг оси X’’ на угол θ, называемый углом нутации,
ЭЙЛЕРОВЫ УГЛЫ
поворот вокруг оси X’’ на угол θ, называемый углом нутации,
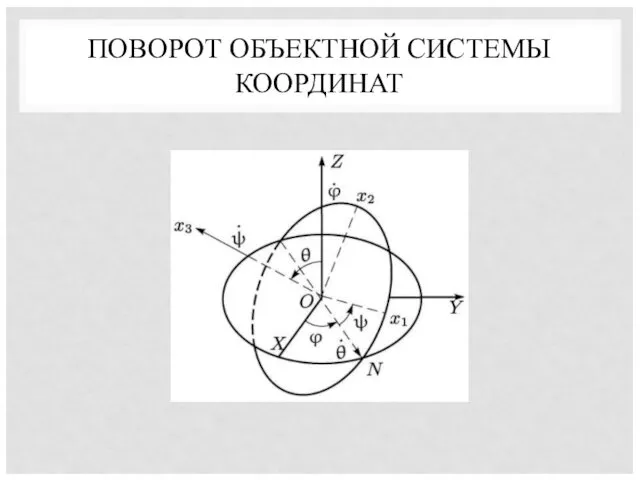
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
ФОРМУЛЫ ПРЕОБРАЗОВАНИЙ
Преобразование координат
Матрица поворота
ФОРМУЛЫ ПРЕОБРАЗОВАНИЙ
Преобразование координат
Матрица поворота
ОБЛАСТЬ ПРИМЕНЕНИЯ ЭЙЛЕРОВЫХ УГЛОВ
Эйлеровы углы традиционно используются в механике для задания
ОБЛАСТЬ ПРИМЕНЕНИЯ ЭЙЛЕРОВЫХ УГЛОВ
Эйлеровы углы традиционно используются в механике для задания
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
В трехмерном пространстве (3D) положение точки может быть задано в
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
В трехмерном пространстве (3D) положение точки может быть задано в
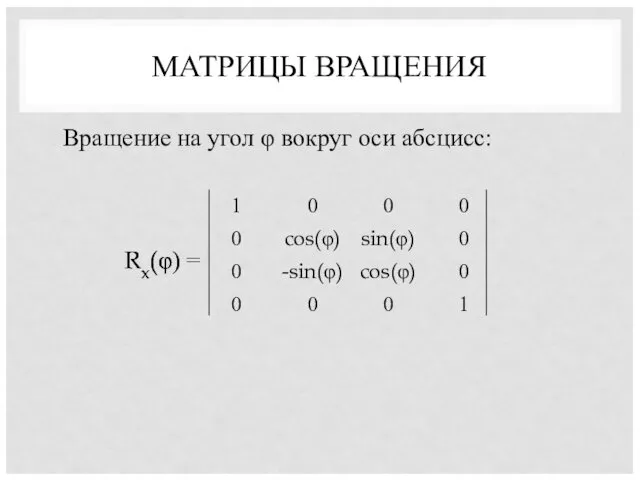
МАТРИЦЫ ВРАЩЕНИЯ
Вращение на угол φ вокруг оси абсцисс:
Rx(φ) =
Rx(φ) =
МАТРИЦЫ ВРАЩЕНИЯ
Вращение на угол φ вокруг оси абсцисс:
Rx(φ) =
Rx(φ) =
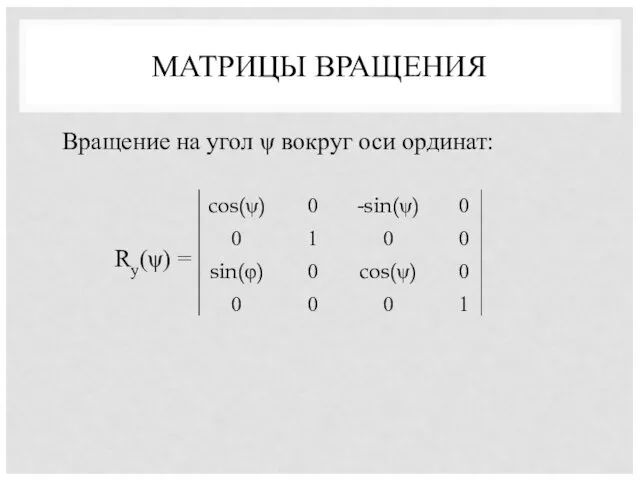
МАТРИЦЫ ВРАЩЕНИЯ
Вращение на угол ψ вокруг оси ординат:
Ry(ψ) =
МАТРИЦЫ ВРАЩЕНИЯ
Вращение на угол ψ вокруг оси ординат:
Ry(ψ) =
МАТРИЦЫ ВРАЩЕНИЯ
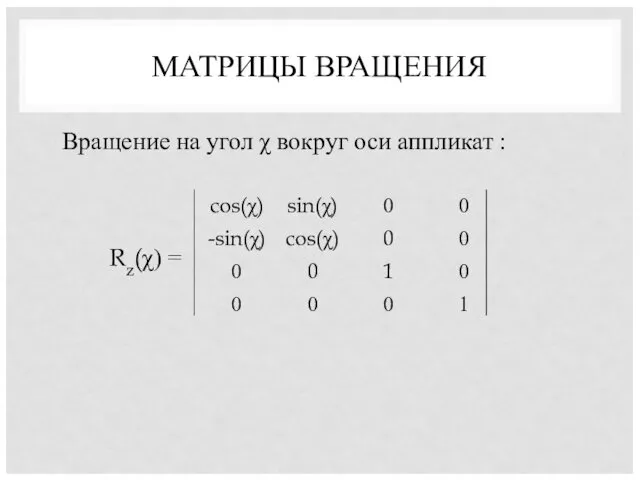
Вращение на угол χ вокруг оси аппликат :
Rz(χ) =
МАТРИЦЫ ВРАЩЕНИЯ
Вращение на угол χ вокруг оси аппликат :
Rz(χ) =
ПРОЧИЕ МАТРИЦЫ
Матрицы растяжения/сжатия, матрицы отражения относительно координатных плоскостей и матрица перемещения
ПРОЧИЕ МАТРИЦЫ
Матрицы растяжения/сжатия, матрицы отражения относительно координатных плоскостей и матрица перемещения
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Так же, как и при использовании эйлеровых углов,
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Так же, как и при использовании эйлеровых углов,
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Математически такой поворот описывается следующей матричной операцией:
(x’’, y’’,
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Математически такой поворот описывается следующей матричной операцией:
(x’’, y’’,
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Последний поворот выполняется на некоторый угол χ вокруг
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Последний поворот выполняется на некоторый угол χ вокруг
МАТРИЦА ПОВОРОТА
Полная матрица поворота, полученная перемножением трех матриц имеет вид:
R(φ, ψ,
МАТРИЦА ПОВОРОТА
Полная матрица поворота, полученная перемножением трех матриц имеет вид:
R(φ, ψ,
АЛГОРИТМЫ ПРОЕЦИРОВАНИЯ
АЛГОРИТМЫ ПРОЕЦИРОВАНИЯ
ЗАДАЧА ПРОЕЦИРОВАНИЯ
Отображение некоторого множества точек S пространства Rn на другое пространство
ЗАДАЧА ПРОЕЦИРОВАНИЯ
Отображение некоторого множества точек S пространства Rn на другое пространство
ПОСТРОЕНИЕ ПРОЕКЦИЙ
Для построения проекции выбирается некоторая точка – центр проецирования –
ПОСТРОЕНИЕ ПРОЕКЦИЙ
Для построения проекции выбирается некоторая точка – центр проецирования –
ВИДЫ ПРОЕКЦИЙ
Если в качестве центра проецирования выбирается собственная точка пространства R3,
ВИДЫ ПРОЕКЦИЙ
Если в качестве центра проецирования выбирается собственная точка пространства R3,
ВИДЫ ПАРАЛЛЕЛЬНЫХ ПРОЕКЦИЙ
В зависимости от расположения картинной плоскости и координатных осей
ВИДЫ ПАРАЛЛЕЛЬНЫХ ПРОЕКЦИЙ
В зависимости от расположения картинной плоскости и координатных осей
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
Картинная плоскость совпадает с одной из координатных плоскостей или параллельна
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
Картинная плоскость совпадает с одной из координатных плоскостей или параллельна
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
В случае, если картинная плоскость параллельна плоскости YOZ, матрица проецирования
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
В случае, если картинная плоскость параллельна плоскости YOZ, матрица проецирования
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
Аналогичным образом могут быть получены матрицы проецирования вдоль двух других
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
Аналогичным образом могут быть получены матрицы проецирования вдоль двух других
ВЫРОЖДЕННОСТЬ МАТРИЦ
Матрицы проецирования являются вырожденными, т.е. проецирование является необратимой операцией
Это
ВЫРОЖДЕННОСТЬ МАТРИЦ
Матрицы проецирования являются вырожденными, т.е. проецирование является необратимой операцией
Это
АКСОНОМЕТРИЧЕСКИЕ ПРОЕКЦИИ
При аксонометрической проекции проектирующие прямые также перпендикулярны картинной плоскости, однако
АКСОНОМЕТРИЧЕСКИЕ ПРОЕКЦИИ
При аксонометрической проекции проектирующие прямые также перпендикулярны картинной плоскости, однако

АКСОНОМЕТРИЧЕСКОЕ ПРОЕЦИРОВАНИЕ
АКСОНОМЕТРИЧЕСКОЕ ПРОЕЦИРОВАНИЕ
ВИДЫ АКСОНОМЕТРИЧЕСКИХ ПРОЕКЦИЙ
В соответствии со взаимным расположением картинной плоскости и координатных
ВИДЫ АКСОНОМЕТРИЧЕСКИХ ПРОЕКЦИЙ
В соответствии со взаимным расположением картинной плоскости и координатных
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
Любая аксонометрическая проекция может быть получена комбинацией поворота до
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
Любая аксонометрическая проекция может быть получена комбинацией поворота до
ВЫБОР ПЛОСКОСТИ ПРОЕЦИРОВАНИЯ
В дальнейшем мы будем рассматривать фронтальные проекции объектов, то
ВЫБОР ПЛОСКОСТИ ПРОЕЦИРОВАНИЯ
В дальнейшем мы будем рассматривать фронтальные проекции объектов, то
ВЫБОР УГЛОВ ПОВОРОТА
ВЫБОР УГЛОВ ПОВОРОТА
МАТРИЦА ПОВОРОТА
Совмещение вектора нормали к картинной плоскости с осью OZ мировой
МАТРИЦА ПОВОРОТА
Совмещение вектора нормали к картинной плоскости с осью OZ мировой
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
После перемножения матриц Ry(Ψ) и Rx(φ), а также
последующего проецирования
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
После перемножения матриц Ry(Ψ) и Rx(φ), а также
последующего проецирования
ТРИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
При таком проецировании единичные орты координатных осей преобразуются следующим образом:
ex*M=(1
ТРИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
При таком проецировании единичные орты координатных осей преобразуются следующим образом:
ex*M=(1
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Равенство углов между нормалью к картинной плоскости и двумя координатными
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Равенство углов между нормалью к картинной плоскости и двумя координатными
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Отсюда следует, что
sin2 ψ = tg2 φ
Теперь углы
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Отсюда следует, что
sin2 ψ = tg2 φ
Теперь углы
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Аналогичным образом могут быть рассмотрены две другие диметрические проекции, соответствующие
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Аналогичным образом могут быть рассмотрены две другие диметрические проекции, соответствующие
СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Тогда из условий
sin2 ψ = tg2 φ
и
cos2
СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Тогда из условий
sin2 ψ = tg2 φ
и
cos2
СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
В случае, когда единичный вектор нормали к картинной плоскости
СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
В случае, когда единичный вектор нормали к картинной плоскости
ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
В этом случае все три проекции единичных ортов равны между
ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
В этом случае все три проекции единичных ортов равны между
СТАНДАРТНАЯ ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Соответствует выбору ψ = π/4
В этом случае матрица
СТАНДАРТНАЯ ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Соответствует выбору ψ = π/4
В этом случае матрица
КОСОУГОЛЬНЫЕ ПРОЕКЦИИ
При косоугольном проецировании пучок проецирующих лучей не перпендикулярен картинной плоскости.
КОСОУГОЛЬНЫЕ ПРОЕКЦИИ
При косоугольном проецировании пучок проецирующих лучей не перпендикулярен картинной плоскости.
КОСОУГОЛЬНЫЕ ПРОЕКЦИИ
Матрица соответствующего преобразования имеет вид:
КОСОУГОЛЬНЫЕ ПРОЕКЦИИ
Матрица соответствующего преобразования имеет вид:
ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ
Выделяют два вида косоугольных проекций:
свободную,
кабинетную.
В случае свободной проекции угол
ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ
Выделяют два вида косоугольных проекций:
свободную,
кабинетную.
В случае свободной проекции угол
ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ
Кабинетная проекция является частным случаем свободной проекции – масштаб
ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ
Кабинетная проекция является частным случаем свободной проекции – масштаб
ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ
Пусть центр проецирования – точка C с координатами (0, 0,
ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ
Пусть центр проецирования – точка C с координатами (0, 0,
ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ
Эта прямая пересекается с картинной плоскостью в точке с координатами
x0'
ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ
Эта прямая пересекается с картинной плоскостью в точке с координатами
x0'
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
В случае, когда центр проецирования имеет координаты (cx, cy,
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
В случае, когда центр проецирования имеет координаты (cx, cy,
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
Аналогичным образом можно получить матрицы центрального проецирования на плоскость
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
Аналогичным образом можно получить матрицы центрального проецирования на плоскость
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
и на плоскость YOZ
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
и на плоскость YOZ
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ПРЯМОЙ
Центральной проекцией прямой также является прямая. Пусть
p(t) =
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ПРЯМОЙ
Центральной проекцией прямой также является прямая. Пусть
p(t) =
 Основи будівельного креслення
Основи будівельного креслення Реконструкция архитектурных перспектив и приемы фотомонтажа в перспективе
Реконструкция архитектурных перспектив и приемы фотомонтажа в перспективе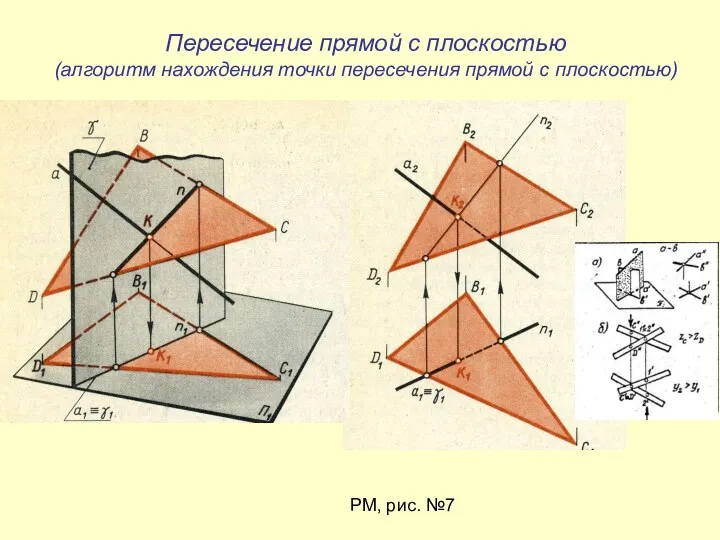 Пересечение прямой с плоскостью (алгоритм нахождения точки пересечения прямой с плоскостью)
Пересечение прямой с плоскостью (алгоритм нахождения точки пересечения прямой с плоскостью) Инженерная графика
Инженерная графика Метод проекций. Эпюр Монжа. Проекции точки. Проецирование отрезка прямой линии
Метод проекций. Эпюр Монжа. Проекции точки. Проецирование отрезка прямой линии Определение истинной величины отрезка и угла его наклона к плоскости проекций
Определение истинной величины отрезка и угла его наклона к плоскости проекций Сопряжение. 8 класс
Сопряжение. 8 класс Дополнительные ортогональные проекции
Дополнительные ортогональные проекции Разъемные соединения
Разъемные соединения Базовые ГОСТы
Базовые ГОСТы Поверхности. Способы задания поверхности
Поверхности. Способы задания поверхности Поверхности. Задание поверхности на чертеже
Поверхности. Задание поверхности на чертеже Фронтальная косоугольная диметрическая и прямоугольная изометрическая проекции
Фронтальная косоугольная диметрическая и прямоугольная изометрическая проекции Начертательная геометрия, инженерная и компьютерная графика. Курсовой проект
Начертательная геометрия, инженерная и компьютерная графика. Курсовой проект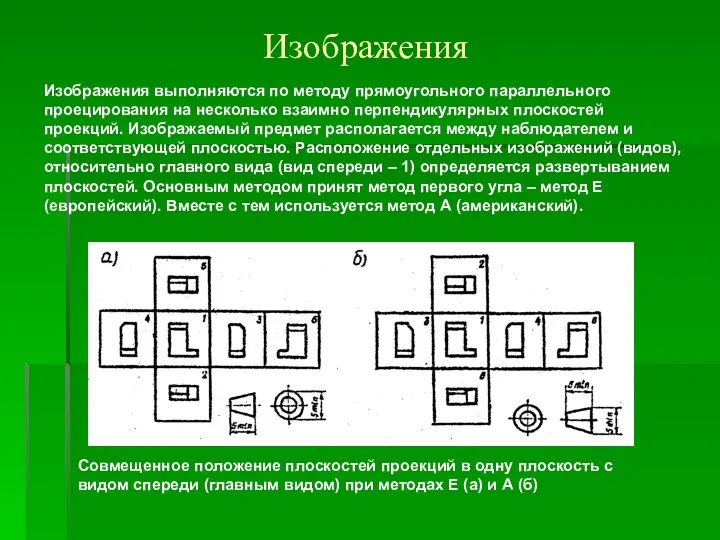 Изображения. Виды
Изображения. Виды Чертежные инструменты и методы работы с ними. Лекция 1
Чертежные инструменты и методы работы с ними. Лекция 1 Объект и пространство. От плоскостного изображения к объемному макету. Взаимосвязь объектов в архитектурном макете
Объект и пространство. От плоскостного изображения к объемному макету. Взаимосвязь объектов в архитектурном макете Тени в изометрических проекциях
Тени в изометрических проекциях Задание поверхностей на комплексном чертеже. Развертывающиеся линейчатые поверхности. Поверхности с плоскостью параллелизма
Задание поверхностей на комплексном чертеже. Развертывающиеся линейчатые поверхности. Поверхности с плоскостью параллелизма Схема климатической установки Панасоник
Схема климатической установки Панасоник Изображения – виды, разрезы, сечения
Изображения – виды, разрезы, сечения Аксонометрические проекции. Урок 1
Аксонометрические проекции. Урок 1 Шрифты в архитектурной графике
Шрифты в архитектурной графике Проецирование геометрических тел
Проецирование геометрических тел Виды местные и дополнительные
Виды местные и дополнительные Сечения. Конструктивные элементы и их изображения
Сечения. Конструктивные элементы и их изображения Оформление чертежей. Линии Форматы
Оформление чертежей. Линии Форматы Пересечение многогранников проецирующей плоскостью
Пересечение многогранников проецирующей плоскостью