Пересечение прямой с плоскостью (алгоритм нахождения точки пересечения прямой с плоскостью) презентация
- Пересечение прямой с плоскостью (алгоритм нахождения точки пересечения прямой с плоскостью)

Содержание
- 2. Пересечение прямой с плоскостью Плоскость задана двумя пересекающими прямыми Плоскость задана следами
- 3. Пересечение плоскостей (алгоритм – пересечение прямой с плоскостью) Раб. тетрадь: задача №16
- 4. Преобразование чертежа (преобразование ортогональных проекций)
- 7. Методы преобразования ортогональных проекций 1.Метод плоскопараллельного перемещения способ параллельного перемещения, способ вращения вокруг оси, перпендикулярной к
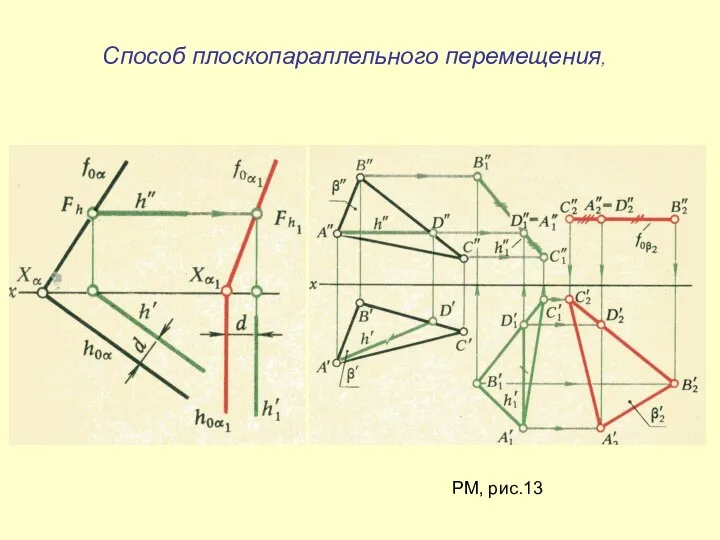
- 8. Способ плоскопараллельного перемещения,
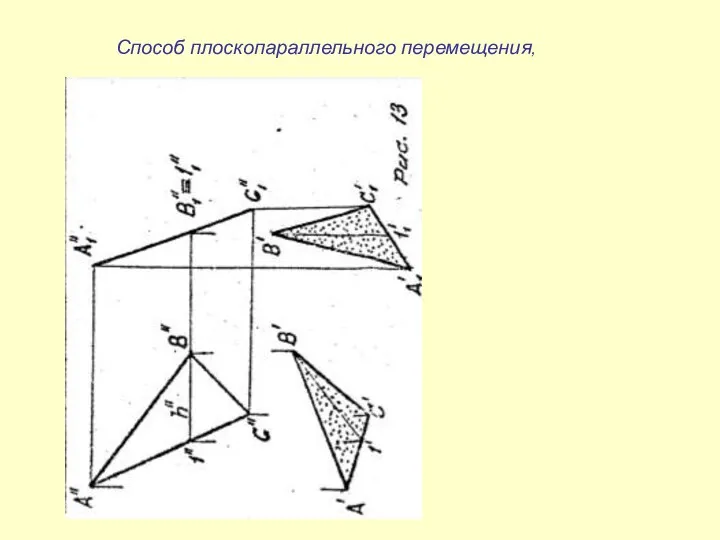
- 9. Способ плоскопараллельного перемещения,
- 10. Способ плоскопараллельного перемещения, РМ, рис.13
- 11. Способ плоскопараллельного перемещения,
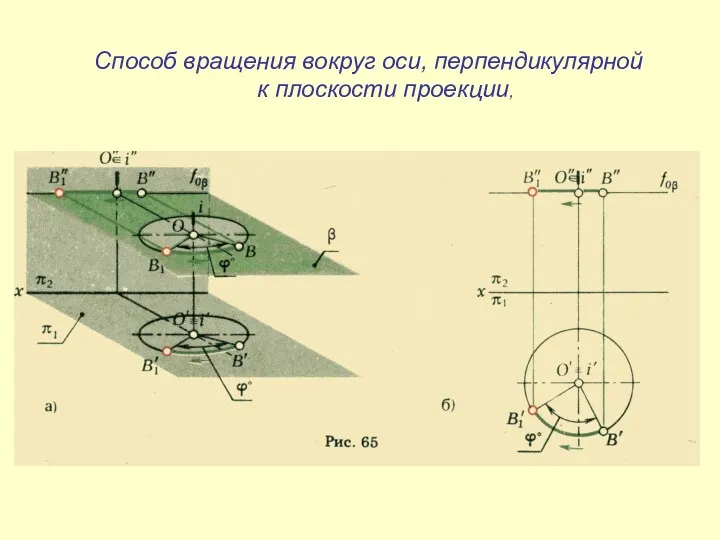
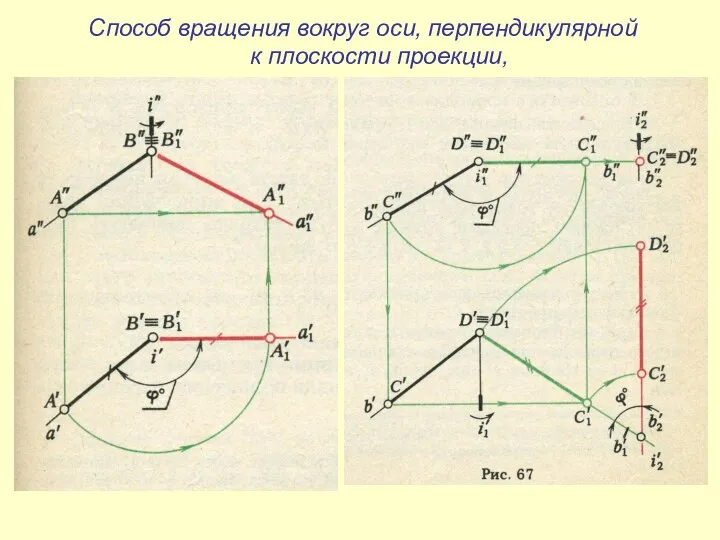
- 12. Способ вращения вокруг оси, перпендикулярной к плоскости проекции,
- 13. Способ вращения вокруг оси, перпендикулярной к плоскости проекции,
- 14. Способ вращения вокруг оси, перпендикулярной к плоскости проекции,
- 15. Вращение относительно прямой, перпендикулярной плоскости проекции
- 16. Способ вращения вокруг оси, параллельной плоскости проекции (вращение вокруг линии уровня, РМ: рис.14
- 17. Способ вращения вокруг оси, принадлежащей плоскости проекции (вращение вокруг следа плоскости).
- 18. Способ вращения вокруг оси, принадлежащей плоскости проекции (вращение вокруг следа плоскости
- 19. Метод замены плоскостей проекции. РМ: рис.15
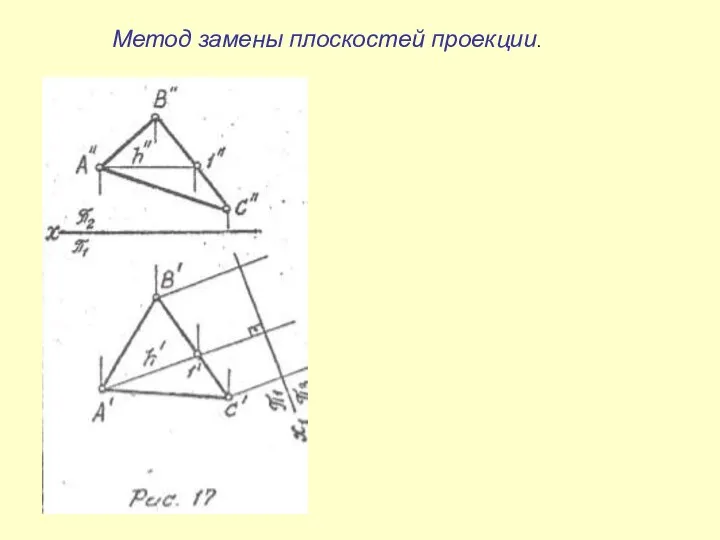
- 20. Метод замены плоскостей проекции. РМ: рис.16, 17
- 21. Метод перемены плоскостей проекции.
- 22. Метод замены плоскостей проекции.
- 23. Способ перемены плоскостей проекции Способ вращения вокруг оси, перпендикулярной плоскости проекции Способ перемены плоскостей проекции Способ
- 24. Поверхности F(x, y, z)=0 , где F(x, y, z) – многочлен n- степени Способы задания поверхностей
- 25. Задание поверхности каркасом (каркас - упорядоченное множество точек или линий, принадлежащих поверхности) РМ: рис.27
- 26. Задание поверхности определителем Ф(Г);[A] (Г) – геометрическая часть,[A] – алгебраическая часть РМ: рис.28
- 27. Задание поверхности очерком (очерк - след на плоскости проекции проецирующей цилиндрической поверхности, которая огибает заданную поверхность)
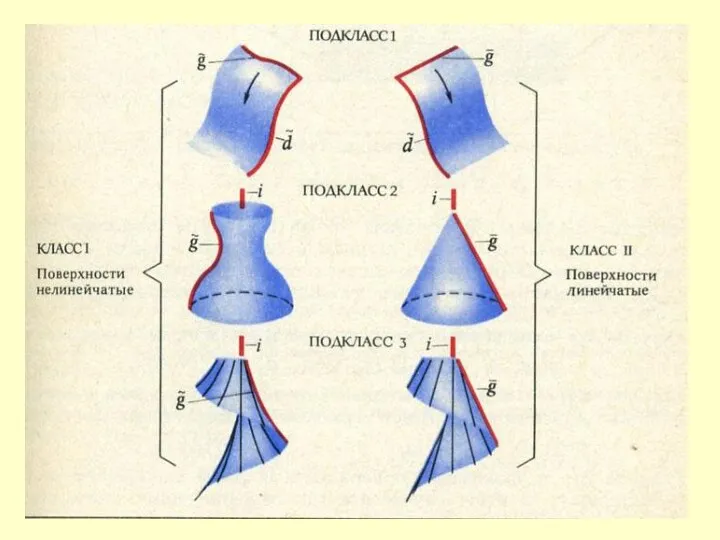
- 28. Классификация поверхностей с использованием определителя Поверхности с образующей переменного вида Поверхности с образующей постоянного вида Нелинейчатые
- 30. Поверхности вращения (основные определения) РМ: рис.33
- 32. Ортогональные проекции поверхностей частного вида Открытый тор Закрытый тор Сфера Глобоид
- 33. Винтовые поверхности (получены винтовым перемещением образующей)
- 35. Скачать презентацию
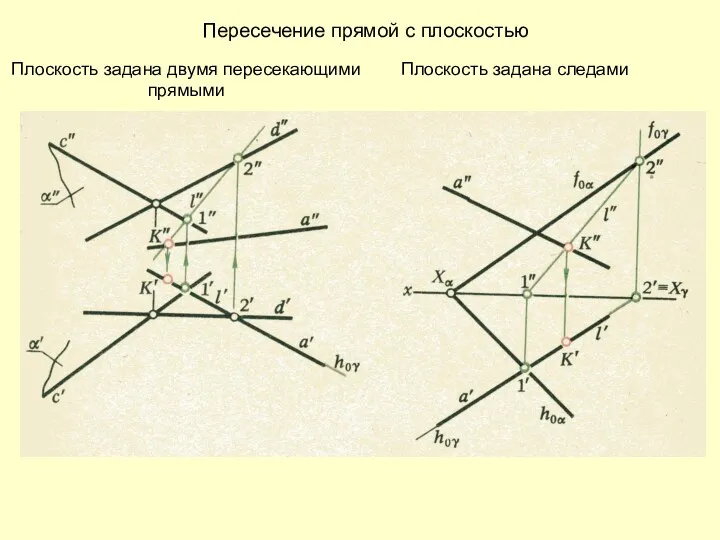
Пересечение прямой с плоскостью
Плоскость задана двумя пересекающими
прямыми
Плоскость задана следами
Пересечение прямой с плоскостью
Плоскость задана двумя пересекающими
прямыми
Плоскость задана следами
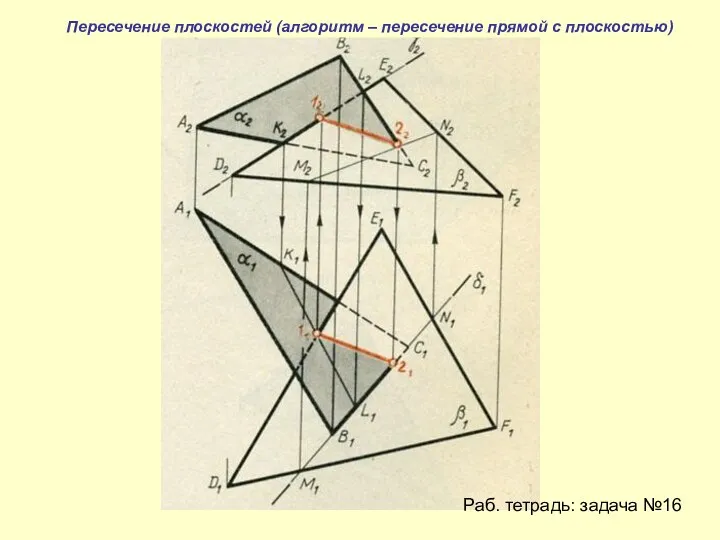
Пересечение плоскостей (алгоритм – пересечение прямой с плоскостью)
Раб. тетрадь: задача №16
Пересечение плоскостей (алгоритм – пересечение прямой с плоскостью)
Раб. тетрадь: задача №16
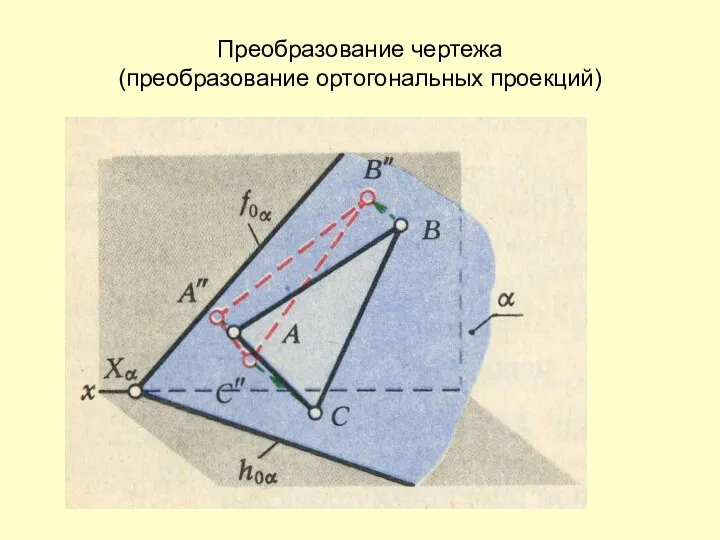
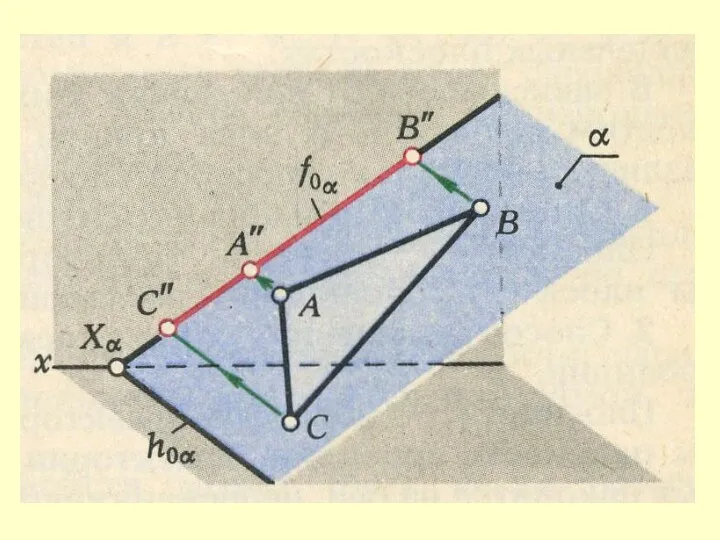
Преобразование чертежа
(преобразование ортогональных проекций)
Преобразование чертежа
(преобразование ортогональных проекций)
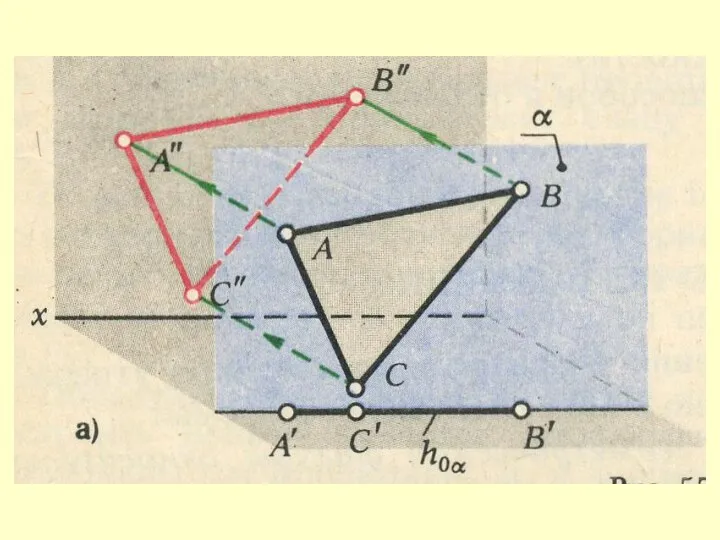
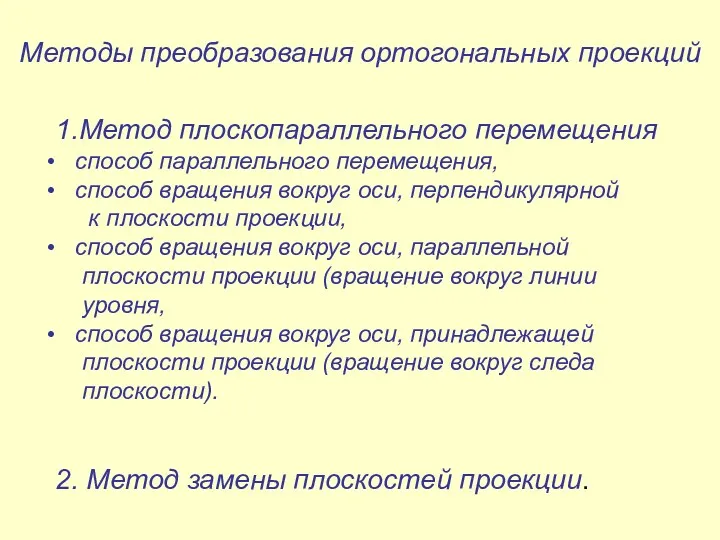
Методы преобразования ортогональных проекций
1.Метод плоскопараллельного перемещения
способ параллельного перемещения,
способ вращения
Методы преобразования ортогональных проекций
1.Метод плоскопараллельного перемещения
способ параллельного перемещения,
способ вращения
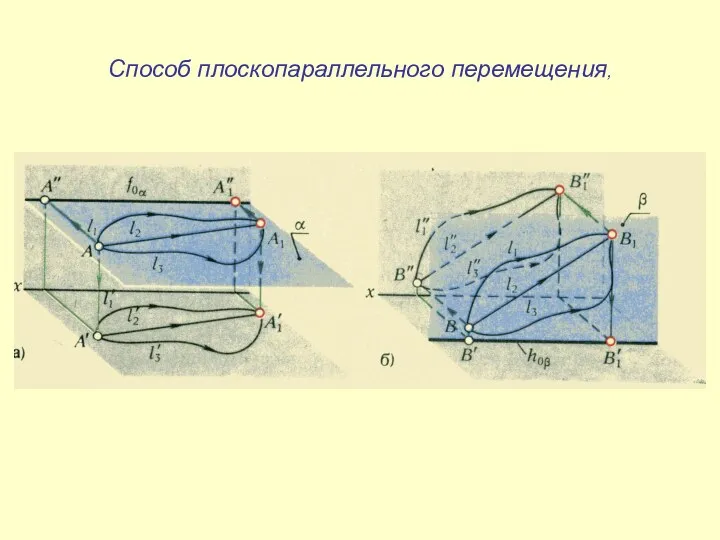
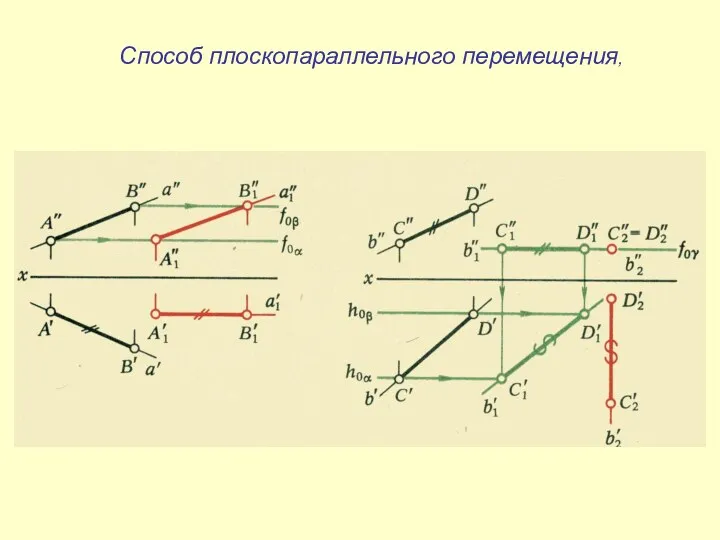
Способ плоскопараллельного перемещения,
Способ плоскопараллельного перемещения,
Способ плоскопараллельного перемещения,
Способ плоскопараллельного перемещения,
Способ плоскопараллельного перемещения,
РМ, рис.13
Способ плоскопараллельного перемещения,
РМ, рис.13
Способ плоскопараллельного перемещения,
Способ плоскопараллельного перемещения,
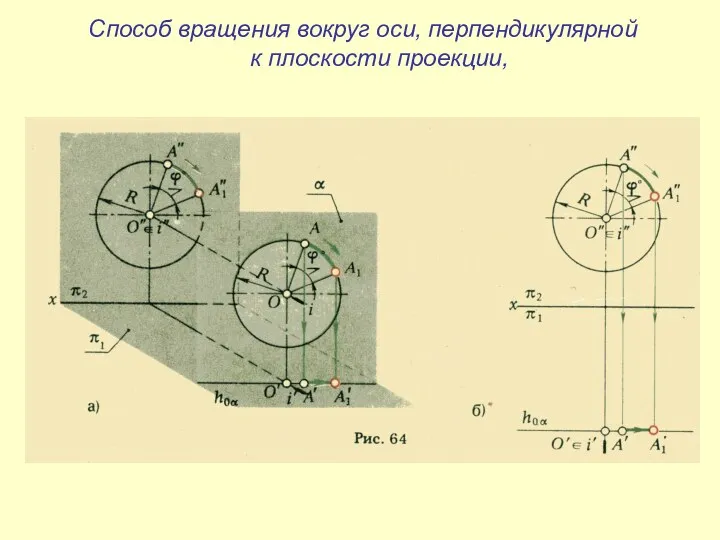
Способ вращения вокруг оси, перпендикулярной
к плоскости проекции,
Способ вращения вокруг оси, перпендикулярной
к плоскости проекции,
Способ вращения вокруг оси, перпендикулярной
к плоскости проекции,
Способ вращения вокруг оси, перпендикулярной
к плоскости проекции,
Способ вращения вокруг оси, перпендикулярной
к плоскости проекции,
Способ вращения вокруг оси, перпендикулярной
к плоскости проекции,
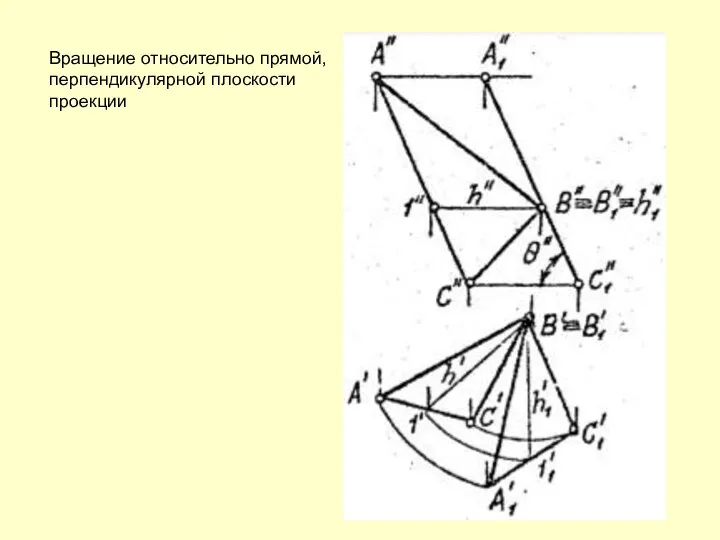
Вращение относительно прямой,
перпендикулярной плоскости
проекции
Вращение относительно прямой,
перпендикулярной плоскости
проекции
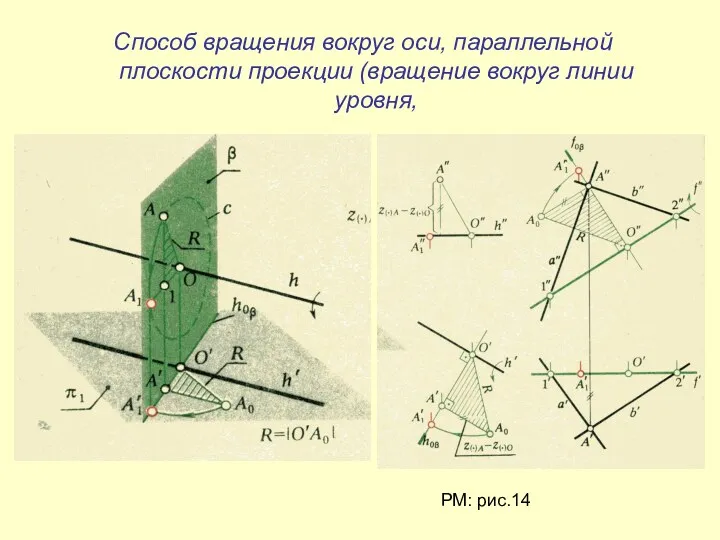
Способ вращения вокруг оси, параллельной
плоскости проекции (вращение вокруг линии
уровня,
РМ:
Способ вращения вокруг оси, параллельной
плоскости проекции (вращение вокруг линии
уровня,
РМ:
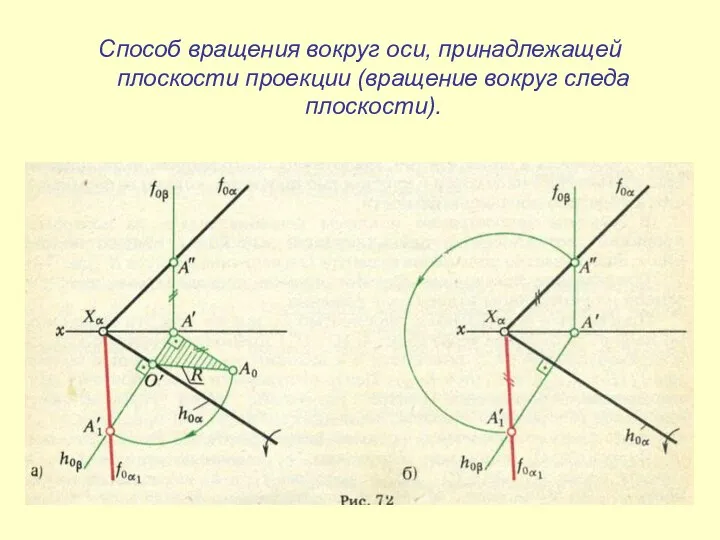
Способ вращения вокруг оси, принадлежащей
плоскости проекции (вращение вокруг следа
Способ вращения вокруг оси, принадлежащей
плоскости проекции (вращение вокруг следа
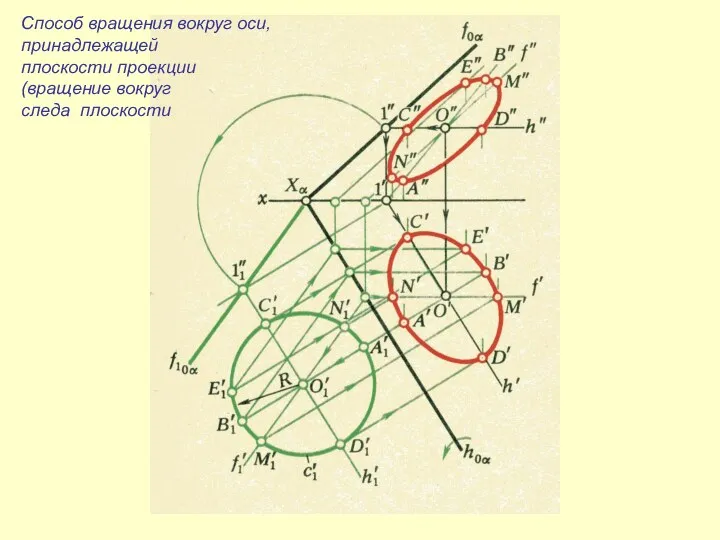
Способ вращения вокруг оси, принадлежащей
плоскости проекции
(вращение вокруг
следа плоскости
Способ вращения вокруг оси, принадлежащей
плоскости проекции
(вращение вокруг
следа плоскости
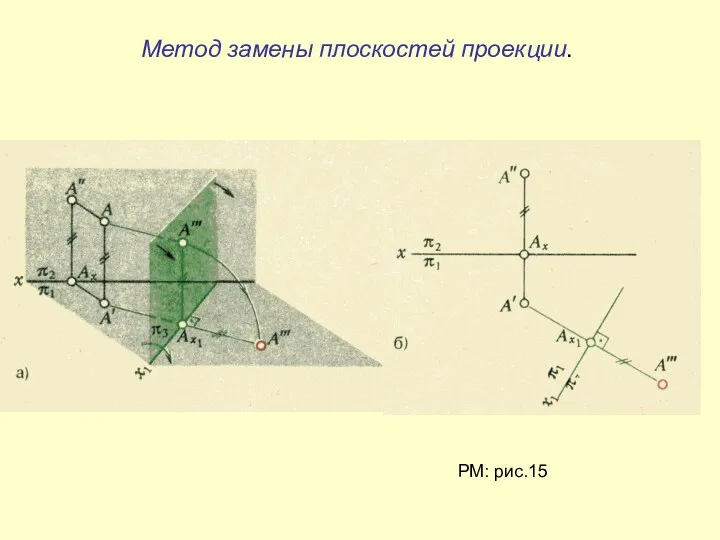
Метод замены плоскостей проекции.
РМ: рис.15
Метод замены плоскостей проекции.
РМ: рис.15
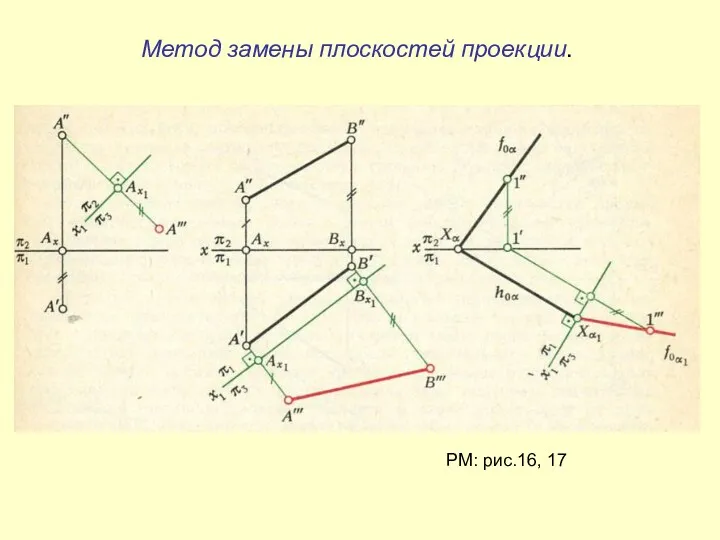
Метод замены плоскостей проекции.
РМ: рис.16, 17
Метод замены плоскостей проекции.
РМ: рис.16, 17
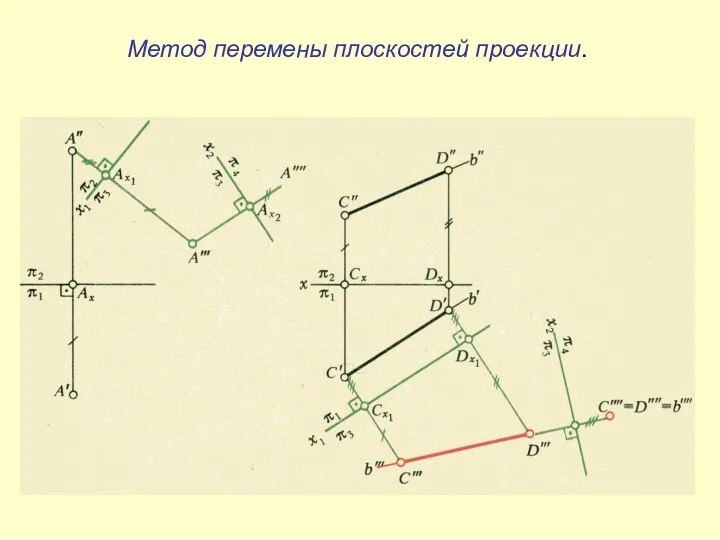
Метод перемены плоскостей проекции.
Метод перемены плоскостей проекции.
Метод замены плоскостей проекции.
Метод замены плоскостей проекции.
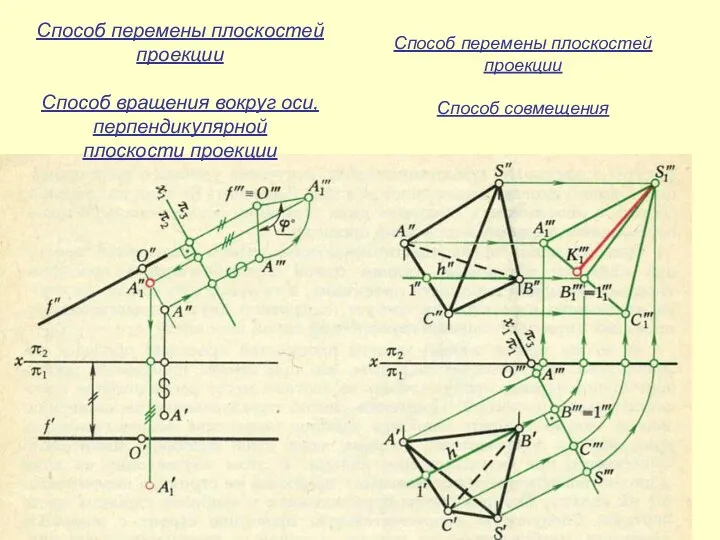
Способ перемены плоскостей
проекции
Способ вращения вокруг оси,
перпендикулярной
плоскости проекции
Способ перемены плоскостей
проекции
Способ совмещения
Способ перемены плоскостей
проекции
Способ вращения вокруг оси,
перпендикулярной
плоскости проекции
Способ перемены плоскостей
проекции
Способ совмещения
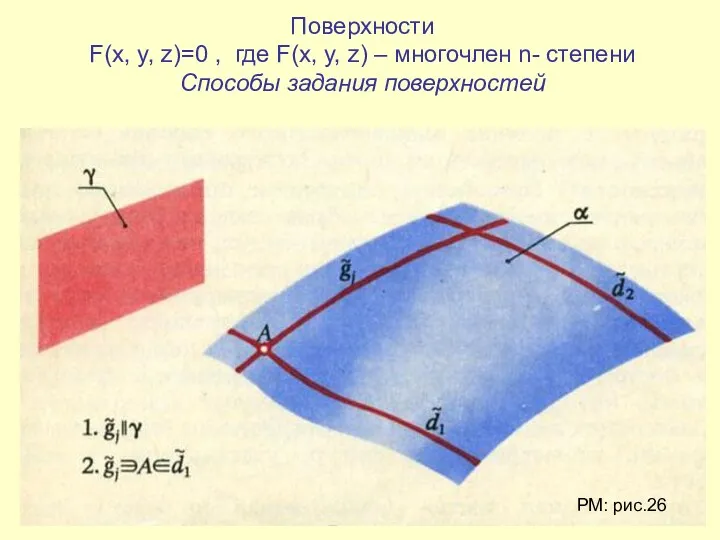
Поверхности
F(x, y, z)=0 , где F(x, y, z) – многочлен
Поверхности
F(x, y, z)=0 , где F(x, y, z) – многочлен
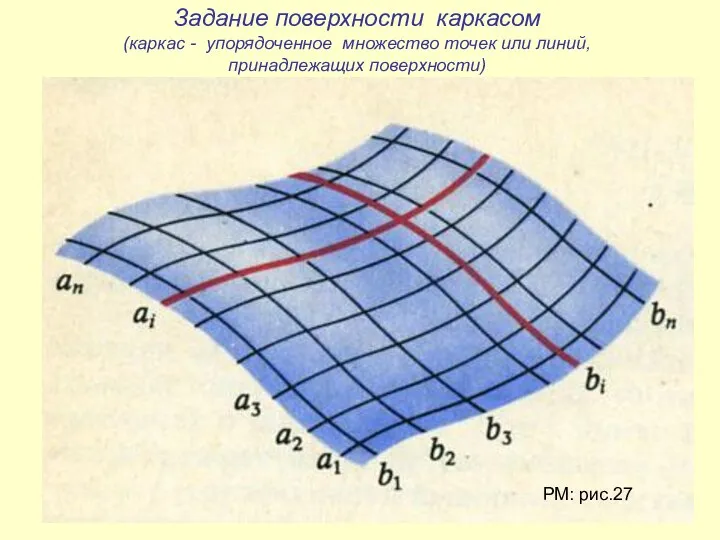
Задание поверхности каркасом
(каркас - упорядоченное множество точек или линий, принадлежащих поверхности)
РМ:
Задание поверхности каркасом
(каркас - упорядоченное множество точек или линий, принадлежащих поверхности)
РМ:
![Задание поверхности определителем Ф(Г);[A] (Г) – геометрическая часть,[A] – алгебраическая часть РМ: рис.28](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/309160/slide-25.jpg)
Задание поверхности определителем
Ф(Г);[A]
(Г) – геометрическая часть,[A] – алгебраическая часть
РМ: рис.28
Задание поверхности определителем
Ф(Г);[A]
(Г) – геометрическая часть,[A] – алгебраическая часть
РМ: рис.28
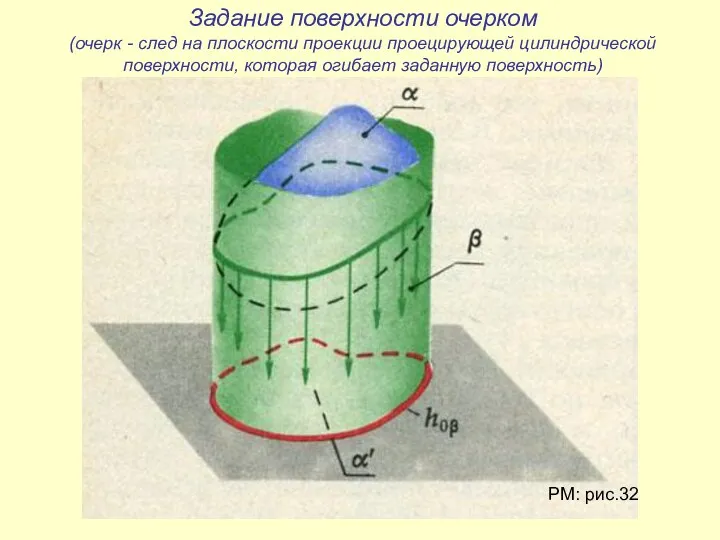
Задание поверхности очерком
(очерк - след на плоскости проекции проецирующей цилиндрической поверхности,
Задание поверхности очерком
(очерк - след на плоскости проекции проецирующей цилиндрической поверхности,
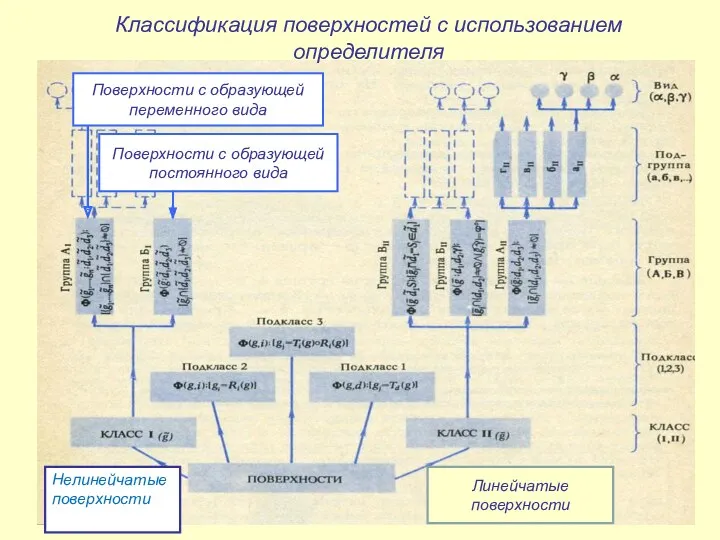
Классификация поверхностей с использованием определителя
Поверхности с образующей
переменного вида
Поверхности с образующей
постоянного вида
Нелинейчатые
поверхности
Линейчатые
поверхности
Классификация поверхностей с использованием определителя
Поверхности с образующей
переменного вида
Поверхности с образующей
постоянного вида
Нелинейчатые
поверхности
Линейчатые
поверхности
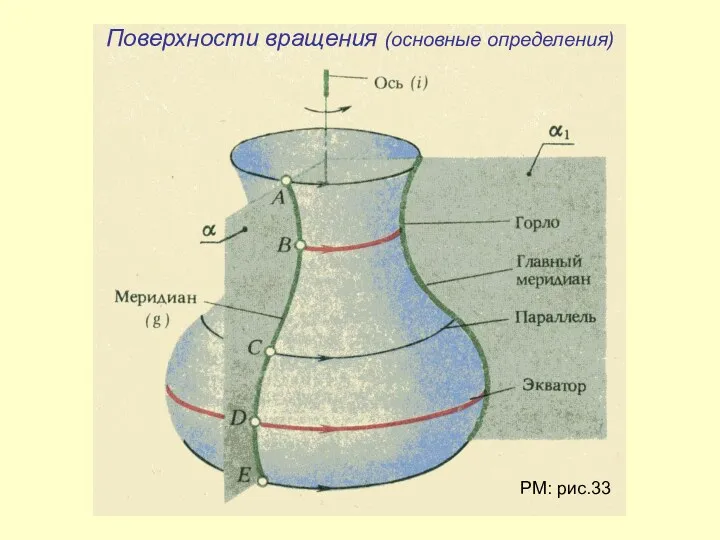
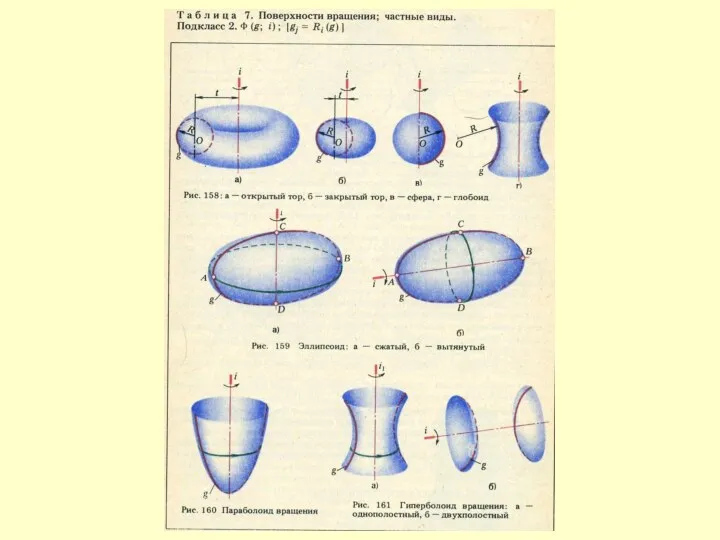
Поверхности вращения (основные определения)
РМ: рис.33
Поверхности вращения (основные определения)
РМ: рис.33
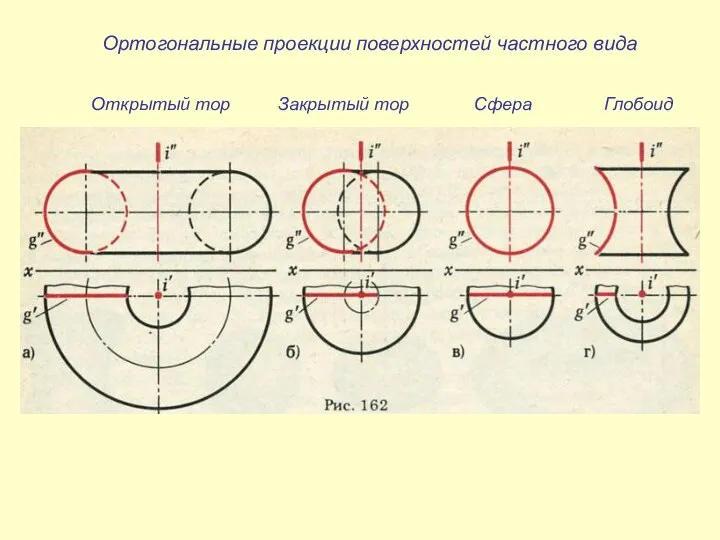
Ортогональные проекции поверхностей частного вида
Открытый тор
Закрытый тор
Сфера
Глобоид
Ортогональные проекции поверхностей частного вида
Открытый тор
Закрытый тор
Сфера
Глобоид
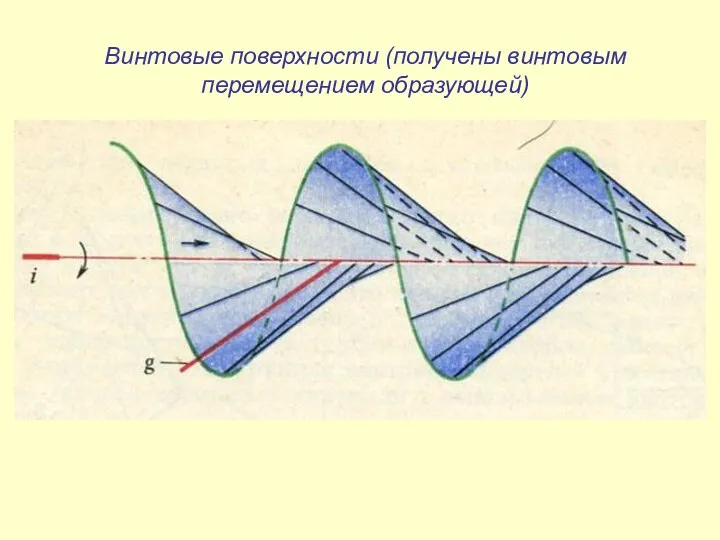
Винтовые поверхности (получены винтовым
перемещением образующей)
Винтовые поверхности (получены винтовым
перемещением образующей)
 Инженерная графика
Инженерная графика Линии чертежа
Линии чертежа Оформление конструкторской документации на печатную плату
Оформление конструкторской документации на печатную плату Общая планировка механического цеха. Условные обозначения
Общая планировка механического цеха. Условные обозначения Аксонометрические проекции. Получение аксонометрических проекций
Аксонометрические проекции. Получение аксонометрических проекций Поєднання вигляду і розрізу
Поєднання вигляду і розрізу Аксонометрические проекции
Аксонометрические проекции Технологический этап проекта
Технологический этап проекта Технический рисунок. Алгоритм построения
Технический рисунок. Алгоритм построения Основы стандартизации. ЕСКД. Форматы. Масштабы. Виды изделий и документов. Построение видов изображений
Основы стандартизации. ЕСКД. Форматы. Масштабы. Виды изделий и документов. Построение видов изображений Способы преобразования чертежа
Способы преобразования чертежа Аксонометрические проекции. Урок 1
Аксонометрические проекции. Урок 1 Указание на чертежах предельных отклонений формы и расположение поверхностей
Указание на чертежах предельных отклонений формы и расположение поверхностей Геометрические тела. Построение фигур на 3 плоскости, точка на поверхности
Геометрические тела. Построение фигур на 3 плоскости, точка на поверхности Изображение и обозначение резьб
Изображение и обозначение резьб Изображения: виды, разрезы, сечения
Изображения: виды, разрезы, сечения Резьба. Крепёжные изделия
Резьба. Крепёжные изделия Компьютерная инженерная графика. (Часть 4)
Компьютерная инженерная графика. (Часть 4) Autodesk inventor файл-шаблон чертежа. Модуль поддержка ЕСКД. Базовый вид. Проекционный вид. Слои. Свойство ассоциативности
Autodesk inventor файл-шаблон чертежа. Модуль поддержка ЕСКД. Базовый вид. Проекционный вид. Слои. Свойство ассоциативности Построение волюты ионического ордера
Построение волюты ионического ордера Каркас одноэтажного промышленного здания
Каркас одноэтажного промышленного здания Комплект конструкторской документации на сборочную единицу
Комплект конструкторской документации на сборочную единицу Особенности строительных чертежей
Особенности строительных чертежей Расположение плоскостей проекций в пространстве
Расположение плоскостей проекций в пространстве Алгоритм построения окружности в аксонометрии
Алгоритм построения окружности в аксонометрии Крепежные изделия
Крепежные изделия Резьбовые соединения. Разъёмные соединения
Резьбовые соединения. Разъёмные соединения Инженерная графика. Соединение части вида и разреза
Инженерная графика. Соединение части вида и разреза