- Детали машин и основы конструирования

Содержание
- 2. Детали машин Основные понятия и определения Детали машин и основы конструирования является первым расчетно-конструкторским курсом, в
- 3. Детали машин Предмет изучения Среди большого разнообразия деталей и узлов машин выделяют такие, которые применяют почти
- 4. Детали машин Структура курса Процесс разработки конструкции любой машины состоит из ряда последовательных этапов. На основании
- 5. Детали машин Основные требования к машинам Работоспособность, надежность, технологичность, экономичность, удобство и безопасность обслуживания, эстетичность. Работоспособность
- 6. Детали машин Критерии работоспособности деталей Главным требованием, предъявляемым к любой детали, является сохранение ее работоспособности в
- 7. Детали машин Прочность Прочность − это способность сопротивляться разрушению при действии заданной нагрузки. Этот критерий является
- 8. Детали машин Допускаемые напряжения При статических нагрузках допускаемые нормальные напряжения определяют по формуле [σ] = ,
- 9. Детали машин Коэффициент запаса прочности Коэффициент запаса прочности получают как произведение частных значений коэффициентов, учитывающих различные
- 10. Детали машин Жесткость Жесткость − это способность сопротивляться деформациям при действии заданной нагрузки. Под деформациями понимаются
- 11. Детали машин Износостойкость Износостойкость – это способность сопротивляться износу. Под износом понимают процесс постепенного изменения размеров
- 12. Детали машин Теплостойкость Теплостойкость – сохранение работоспособности при переменных температурах. Нагрев деталей машин в процессе эксплуатации
- 13. Детали машин Виброустойчивость Виброустойчивость – способность сопротивляться вибра-циям. Появление вибраций при работе машины вызывает дополнительные переменные
- 14. Детали машин Виды расчетов В инженерной практике встречаются два вида расчетов: проектный и проверочный. Проектный расчет
- 15. Детали машин Машиностроительные материалы Для изготовления деталей в машиностроении широко используются стали, чугуны, сплавы цветных металлов.
- 16. Детали машин Углеродистые стали Наиболее широко применяются стали обыкновенного каче-ства. Из них изготавливают детали машин, работающие
- 17. Детали машин Легированные стали и сплавы Низкоуглеродистые стали хорошо поддаются пластической деформации, среднеуглеродистые стали хорошо обрабатывают-ся
- 18. Детали машин Термообработка сталей Для придания стали требуемых свойств выполняют термическую обработку, состоящую из трех стадий:
- 19. Детали машин Химико-термическая обработка сталей Отпуск обычно применяют после закалки стальных отливок, поковок, проката для повышения
- 20. Детали машин Чугуны Чугуном называют железоуглеродистый сплав с содержанием углерода свыше 2%. Чугуны хорошо обрабатываются резанием,
- 21. Детали машин Сплавы цветных металлов Из сплавов цветных металлов наиболее широко в машиностроении применяют сплавы меди
- 22. Детали машин Сплавы цветных металлов Баббиты – сплавы на основе олова, свинца и кальция с хорошими
- 23. Детали машин Лекция 2. Механические передачи Понятие о механических передачах Классификация механических передач вращательного движения Основные
- 24. Детали машин Общее определение Передачей называется устройство, передающее энергию на расстояние, обычно с преобразованием скоростей и
- 25. Детали машин Основные функции механических передач согласование угловых скоростей двигателя и исполнительного органа машины преобразование крутящих
- 26. Детали машин Классификация механических передач Передачи вращательного движения Передачи зацеплением Передачи трением зубчатые червячные фрикционные ременные
- 27. Детали машин Основные кинематические и энергетические зависимости Кинематической характеристикой передачи является передаточное отношение, равное отношению угловой
- 28. Детали машин КПД и крутящие моменты Важной характеристикой передачи является ее коэффи-циент полезного действия, равный отношению
- 29. Детали машин Типы передач Цилиндрические зубчатые передачи применяются для передачи вращения между валами с параллельными осями.
- 30. Детали машин Реечная передача Разновидностью цилиндрической зубчатой передачи является реечная передача, состоящая из шестерни и рейки
- 31. Детали машин Напряжения в зубьях При передаче крутящего момента на зуб действует нормальная к поверхности эвольвенты
- 32. Детали машин Характер изменения напряжений в зубьях Напряжения σH и σF изменяются во времени по пульсирующему
- 33. Детали машин Поломка зуба Поломка зуба наиболее опасный вид разрушения, приводящий не только к выходу из
- 34. Детали машин Выкрашивание рабочих поверхностей зубьев Выкрашивание - основной вид разрушения зубьев для боль-шинства закрытых хорошо
- 35. Детали машин Абразивный износ Абразивный износ является основным видом разрушения зубьев открытых передач. Абразивные частицы, попадая
- 36. Детали машин Заедание зубьев Заедание зубьев проявляется в приваривании частиц материала одного зуба к другому зубу
- 37. Детали машин Выбор материалов зубчатых колес и способов термообработки Выбор материалов зубчатых колес зависит от назначения
- 38. Детали машин Колеса второй группы Вторая группа – зубчатые колеса с твердостью поверхности зубьев H >
- 39. Детали машин Объемная закалка Наиболее простой способ получения высокой твердости зубьев. Применяют для углеродистых и легированных
- 40. Детали машин Поверхностная закалка ТВЧ Поверхностная закалка ТВЧ обеспечивает поверхностную твердость зуба 48…55 HRCэ. Применяется для
- 41. Детали машин Цементация Цементация – насыщение углеродом поверхностного слоя с последующей закалкой. Обеспечивает поверхностную твер-дость зуба
- 42. Детали машин Азотирование Азотирование – насыщение азотом поверхностного слоя. Обеспечивает высокую твердость 58…65 HRCэ и износостой-кость
- 43. Детали машин Нитроцементация Нитроцементация – одновременное насыщение поверх-ностного слоя углеродом и азотом с последующей закалкой. Обеспечивает
- 44. Детали машин Выбор материалов зубчатых колес Выбор материалов зубчатых колес осуществляют по табли-це (см. следующий слайд)
- 45. Детали машин Выбор материалов зубчатых колес
- 46. Детали машин Рекомендуемые материалы зубчатых колес Марки сталей одинаковы для колеса и шестерни 40, 45, 40Х,
- 47. Детали машин Лекция 3. Расчет на прочность цилиндрических зубчатых передач Виды расчетов зубчатых передач Допускаемые напряжения
- 48. Детали машин Виды расчетов зубчатых передач Основой для расчета на прочность цилиндрических зубчатых передач является ГОСТ
- 49. Детали машин Допускаемые напряжения в расчетах на выносливость Для расчета допускаемых напряжений при действии переменных нагрузок
- 50. Детали машин Допускаемые контактные напряжения Наклонный участок кривой усталости аппроксимируется зависимостью где σHlim - предел контактной
- 51. Детали машин Коэффициент долговечности Для определения KHL используют зависимость Если NHE > NH0, то KHL =
- 52. Детали машин Суммарное число циклов напряжений Суммарное число циклов при постоянной частоте вращения n NΣ =
- 53. Детали машин Определение коэффициентов эквивалентности Если задана циклограмма нагружения зубчатой передачи (см. рис.), то коэф-фициент эквивалентности
- 54. Детали машин Типовые режимы нагружения Для перехода к типовому режиму циклограмму перестраивают в относительных единицах и
- 55. Детали машин Коэффициенты эквивалентности для типовых режимов нагружения Значения коэффициентов эквивалентности для выбранного режима нагружения принимают
- 56. Детали машин Порядок расчета допускаемых контактных напряжений Коэффициент безопасности принимают: SH = 1.1 для зубчатых колес
- 57. Детали машин Допускаемые напряжения изгиба При расчете зубьев на выносливость по напряжениям изгиба допускаемые напряжения определяют
- 58. Детали машин Допускаемые напряжения изгиба Формулы для определения σF lim , значения SF, и KFС для
- 59. Детали машин Числа циклов при изгибе Базовое число циклов NFO = 4·106. Эквивалентное число циклов NFE=μF
- 60. Детали машин Допускаемые контактные напряжения при действии пиковых нагрузок Под пиковыми нагрузками понимают максимальные (пусковые) нагрузки,
- 61. Детали машин Допускаемые напряжения изгиба при действии пиковых нагрузок Допускаемые напряжения изгиба при действии пиковых нагрузок
- 62. Детали машин Лекция 4. Расчет на выносливость по контактным напряжениям Задача Герца Вывод формул для проверочного
- 63. Детали машин Задача Герца для случая контакта двух цилиндров Контактная прочность зубьев явля-ется основным критерием работо-способности
- 64. Детали машин Контактные напряжения при взаимодействии двух цилиндров Первоначальный контакт цилиндров осуществляется по линии. При сжатии
- 65. Детали машин Контактные напряжения при взаимодействии двух цилиндров E1 и E2 – модули упругости материалов цилиндров;
- 66. Детали машин Контактные напряжения в зацеплении Радиусы цилиндров в формуле Герца заменяют мгновенными радиусами кривизны эвольвентных
- 67. Детали машин Контактные напряжения в зацеплении Cилу Fn, нормальную к профилям, определим через окруж-ную силу с
- 68. Детали машин Контактные напряжения при взаимодействии зубьев Подставим полученные зависимости в формулу Герца, прини-мая b =
- 69. Детали машин Контактные напряжения при взаимодействии зубьев Принимая αw=20°, εα = 1,6, для стальных колес ν=0,3,
- 70. Детали машин Проектный расчет передачи на выносливость по контактным напряжениям Выразим bw2 через межосевое расстояние bw2
- 71. Детали машин Расчет геометрических параметров передачи Полученное значение aw округляют до ближайшей большей стандартной величины по
- 72. Детали машин Числа зубьев, передаточное число Ширину венца шестерни принимают на 2…5 мм больше bw2 для
- 73. Детали машин Диаметры окружностей зубчатых колес Делительные окружности d1 = mz1/cos β, d2 = mz2/cos β,
- 74. Детали машин Проверочный расчет передачи на выносливость по контактным напряжениям Условие контактной прочности передачи σH ≤
- 75. Детали машин Определение коэффициента KHα Для определения KНα используют эмпирическую формулу KНα = 1 + А
- 76. Детали машин Определение коэффициента KHβ Для учета приработки зубьев рассматривают два значения коэффициента неравномерности распределения нагрузки:
- 77. Детали машин Определение коэффициента KHV Динамический коэффициент KНV позволяет учесть внутреннюю динамическую нагрузку зубчатой передачи, связанную
- 78. Детали машин Лекция 5. Расчет на выносливость по напряжениям изгиба и на прочность при действии пиковой
- 79. Детали машин Расчет на выносливость по напряжениям изгиба ают. Силу Fn переносят по линии ее действия
- 80. Детали машин Расчет на выносливость по напряжениям изгиба Напряжения изгиба и сжатия в опасном сечении n-n
- 81. Детали машин Расчет на выносливость по напряжениям изгиба Расчетное напряжение с учетом коэффициента концентра-ции напряжений kσ
- 82. Детали машин Коэффициент формы зуба Зависимость формы зуба от числа зубьев представлена на рис. Коэффициент формы
- 83. Детали машин Коэффициент нагрузки при изгибе Выражение для определения коэффициента нагрузки при из-гибе имеет такую же
- 84. Детали машин Проверка изгибной прочности зубьев Представим в выражении для σF окружную силу через крутящий момент
- 85. Детали машин Расчет на прочность при действии пиковой нагрузки Критерий контактной прочности при действии пиковой нагрузки
- 86. Детали машин Лекция 6. Расчет косозубых и шевронных передач Особенности геометрии косозубых и шевронных передач Понятие
- 87. Детали машин Особенности геометрии косозубых и шевронных передач В косозубых колесах зубья на делительном цилиндре колеса
- 88. Детали машин Особенности геометрии косозубых и шевронных передач Однако у косозубых передач имеется и существенный недостаток.
- 89. Детали машин Окружной и нормальный модули в косозубой передаче В косозубых колесах расстояние между зубьями можно
- 90. Детали машин Расчет на прочность косозубой передачи Прочность зуба колеса определяется его размерами и формой в
- 91. Детали машин Параметры эквивалентного колеса Исходное косозубое колесо имеет делительный диаметр d и число зубьев z.
- 92. Детали машин Расчет на выносливость по контактным напряжениям Основой для расчета является формула (1). (1) В
- 93. Детали машин Расчет на выносливость по контактным напряжениям Полная нагрузка на зуб колеса перпендикулярна к его
- 94. Детали машин Расчет на выносливость по контактным напряжениям После подстановки значений b, Fn и ρi в
- 95. Детали машин Расчет на выносливость по напряжениям изгиба Специфику нагружения косого зуба учитывают введением в формулу
- 96. Детали машин Силы в цилиндрических зубчатых передачах Принимают, что контакт зубьев происходит в полюсе зацепления, силой
- 97. Детали машин Силы в цилиндрических зубчатых передачах Окружная сила равна Ft = 2000T1/d1. Радиальная сила направлена
- 98. Детали машин Осевая сила в косозубой передаче Величина осевой силы равна Fa = Ft tg β.
- 99. Детали машин Лекция 7. Конические зубчатые передачи Геометрия и кинематика передачи Классификация конических передач Основные параметры
- 100. Детали машин Геометрия и кинематика передачи Конические зубчатые колеса применяют в передачах с пересе-кающимися осями валов.
- 101. Детали машин Геометрия и кинематика передачи Конические передачи выполняют равносмещенными (x1 = – x2), поэто-му начальные
- 102. Детали машин Геометрия и кинематика передачи Размеры, относящиеся к среднему торцовому сечению, обозначают индексом m, к
- 103. Детали машин Геометрия и кинематика передачи Внешние делительные диаметры колес равны de1 = me z1, de2
- 104. Детали машин Геометрия и кинематика передачи Внешнее конусное расстояние, по которому настраивают станок при нарезании зубьев,
- 105. Детали машин Классификация конических передач Конические колеса представляют собой круговые усеченные конусы, на образующих которых нарезаны
- 106. Детали машин Классификация конических передач Угол наклона кругового зуба переменный. За расчетный угол βm принимают угол
- 107. Детали машин Формы зуба конического колеса Осевая форма I – нормально понижающиеся зубья. Вершины делительного и
- 108. Детали машин Основные параметры передачи и коэффициенты смещения Для унификации конических передач и снижения трудозатрат на
- 109. Детали машин Эквивалентные зубчатые колеса Эквивалентным называется та-кое прямозубое цилиндрическое ко-лесо, прочность зуба которого со-ответствует прочности
- 110. Детали машин Параметры эквивалентных колес . Эквивалентные числа зубьев: zv1=dv1/m=z1/cos δ1; zv2= z2/cos δ2. Передаточное число
- 111. Детали машин Расчет на прочность прямозубой конической передачи . Расчет конических передач сводится к расчету эквивалентных
- 112. Детали машин Расчет на прочность прямозубой конической передачи . В результате получим формулу для проверочного расчета
- 113. Детали машин Проектный расчет конической передачи . Допускается перегрузка по контактным напряжениям не более 5%, рекомендуемая
- 114. Детали машин Расчет на выносливость по напряжениям изгиба . По аналогии с расчетом цилиндрической зубчатой передачи
- 115. Детали машин Особенности расчета передачи с круговым зубом . Коэффициенты θH и θF определяются по табл.
- 116. Детали машин Силы в конических прямозубых передачах . Полная нагрузка в зацеплении Fn приложена в среднем
- 117. Детали машин Силы в конических прямозубых передачах . Величину сил определяют по формулам: Ft = 2000T1/dm1;
- 118. Детали машин Силы в конических передачах с круговым зубом . Окружная сила в этих передачах вычисляется
- 119. Детали машин Лекция 8. Червячные передачи Общие положения Классификация червячных передач Основные параметры передачи с цилиндрическим
- 120. Детали машин Червячные передачи . Червячные передачи при-меняют для передачи дви-жения между перекрещива-ющимися валами. В основ-ном
- 121. Детали машин Достоинства и недостатки червячных передач . Достоинствами червячных передач являются: возможность получения больших передаточных
- 122. Детали машин Классификация червячных передач . В зависимости от формы внешней поверхности червяка различают передачи с
- 123. Детали машин Классификация червячных передач . В зависимости от формы профиля витка в торцовом сечении червяка
- 124. Детали машин Классификация червячных передач . Если резец установить в положение 1, при котором его верхняя
- 125. Детали машин Классификация червячных передач . Конволютными называют червяки, имеющие прямолинейный профиль в сечении, нормальном к
- 126. Детали машин Основные параметры передачи с цилиндрическим червяком . Расстояние между одноименными профилями соседних витков червяка,
- 127. Детали машин Основные параметры передачи с цилиндрическим червяком . Основными параметрами червячной передачи с цилиндрическим червяком
- 128. Детали машин Смещение в червячных передачах . Число заходов червяка в стандартной червячной передаче в зависимости
- 129. Детали машин Параметры червяка . Угол профиля архимедова червяка в осевом сечении α=20º. Делительный угол подъема
- 130. Детали машин Параметры червячного колеса . Делительный диаметр d2 = mz2. Диаметр вершин зубьев da2 =
- 131. Детали машин Материалы червяка и колеса . Червяки изготавливают из тех же марок сталей, что и
- 132. Детали машин Материалы червячных колес . Группа II. Безоловянные бронзы и латуни. Применяют при небольших скоростях
- 133. Детали машин Расчет допускаемых напряжений . При определении допускаемых напряжений учитывают, что прочность зуба червячного колеса
- 134. Детали машин Допускаемые контактные напряжения . Допускаемые контактные напряжения вычисляют по эмпирическим формулам в зависимости от
- 135. Детали машин Допускаемые контактные напряжения . Коэффициент долговечности где NHE – эквивалентное число циклов контактных напряже-ний
- 136. Детали машин Определение коэффициента эквивалентности . Для типовых режимов нагружения коэффициенты эквива-лентности μh и μF определяются
- 137. Детали машин Допускаемые контактные напряжения . Для материалов II группы допускаемые контактные напря-жения определяют из условия
- 138. Детали машин Допускаемые напряжения изгиба . Допускаемые напряжения изгиба определяют в зависимости от механических характеристик материала
- 139. Детали машин Коэффициент долговечности при изгибе . При определении KFL используют зависимость где NFE – эквивалентное
- 140. Детали машин Расчет червячной передачи на прочность . Зубья червячных колес рассчитывают так же, как и
- 141. Детали машин Расчет на прочность по контактным напряжениям . Основой для расчета является формула Герца где
- 142. Детали машин Расчет на прочность по контактным напряжениям . Поскольку в осевой плоскости виток червяка имеет
- 143. Детали машин Расчет на прочность по контактным напряжениям . Длину дуги, ограниченной углом охвата 2δ, на
- 144. Детали машин Расчет на прочность по контактным напряжениям . Выражение для lΣ, учитывая начальный угол подъема
- 145. Детали машин Расчет на прочность по контактным напряжениям . Выразим d2 и dw1 через модуль: d2
- 146. Детали машин Расчет на прочность по контактным напряжениям . Коэффициент концентрации нагрузки определяют по формуле где
- 147. Детали машин Проектный расчет червячной передачи . Формулу для проектного расчета получают, выражая aw из (2)
- 148. Детали машин Расчет на изгибную прочность . Расчет выполняется только для зубьев червячного колеса по аналогии
- 149. Детали машин Расчет на изгибную прочность, КПД передачи . Окончательную формулу для проверочного расчета зубьев червячного
- 150. Детали машин Силы в зацеплении . Полное усилие в зацеплении раскладывают на три взаимно-перпендикулярные составляющие (см.
- 151. Детали машин Тепловой расчет . Потери механической энергии в червячной передаче переходят в тепловую энергию. При
- 152. Детали машин Тепловой расчет червячной передачи . где A – площадь поверхности редуктора, через которую проис-ходит
- 153. Детали машин Коэффициент теплоотдачи . Коэффициент теплоотдачи зависит от способа охлаждения. Вариант охлаждения при отсутствии специальных
- 154. Детали машин Тепловой расчет червячной передачи . Основными способами искусственного охлаждения являются (см. рис.) : 1.
- 155. Детали машин Лекция 9. Ременные передачи Общие положения Классификация ременных передач Кинематика и геометрия ременных передач
- 156. Детали машин Ременные передачи . Простейшая ременная переда-ча состоит из ведущего и ведомо-го шкивов и ремня,
- 157. Детали машин Недостатки ременных передач . Сравнительно большие габариты передачи (при одинаковых режимах нагружения диаметры шкивов
- 158. Детали машин Типы ремней . В зависимости от формы поперечного сечения ремня разли-чают следующие ремни: плоские
- 159. Детали машин Классификация передач . а б в г Типам ремней соответствуют передачи: плоскоремен-ные (рис. а),
- 160. Детали машин Плоскоременные передачи . Открытая передача (рис. а) является наиболее распространенной, применяется при параллельном расположении
- 161. Детали машин Классификация передач . В полуперекрестной передаче (рис. в) оси валов лежат в разных плоскостях.
- 162. Детали машин Кинематика и геометрия ременных передач . При проектировании ременных передач определяют: диаметры шкивов d1
- 163. Детали машин Явление упругого скольжения . Обозначим усилия натяжения в ведущей ветви ремня S1, в ведомой
- 164. Детали машин Явление упругого скольжения . Для оценки упругого скольжения вводится понятие относительного скольжения ε =
- 165. Детали машин Параметры ременной передачи . Межосевое расстояние передачи предварительно находят по следующим формулам: для плоского
- 166. Детали машин Силовой расчет ременной передачи . До начала работы ременной передачи в ветвях ремня действуют
- 167. Детали машин Вывод формулы Эйлера . При выводе формулы Эйлера используется расчетная схема, представленная на рис.
- 168. Детали машин Вывод формулы Эйлера . Условие равновесия элемента ремня в направлении оси X: (S +
- 169. Детали машин Формула Эйлера, усилия в ветвях ремня . После потенцирования получим формулу Эйлера S1/S2 =
- 170. Детали машин Напряжения в ремне . Усилия в ремне зависят от площади его поперечного сечения. Для
- 171. Детали машин Напряжения в ремне от действия центробежных сил . При движении ремня по шкиву со
- 172. Детали машин Напряжения в ремне от действия центробежных сил . Сила dF вызывает дополнительные нагрузки в
- 173. Детали машин Напряжение изгиба ремня . В части ремня, огибающей шкив, возникают напряжения изгиба σи. На
- 174. Детали машин Напряжение изгиба и эпюра напряжений в ремне После преобразований получим Отсюда следует, что для
- 175. Детали машин Нагрузки на валы и опоры Силы натяжения в ведущей и холостой ветвях ремня S1
- 176. Детали машин Лекция 10. Расчет ремней Расчет плоских ремней по тяговой способности Расчет плоских ремней на
- 177. Детали машин Расчет ремней (общие положения) Работоспособность ремней определяется двумя основными факторами: тяговой способностью и долговечностью.
- 178. Детали машин Расчет плоских ремней по тяговой способности Тяговая способность ремня оценивается эксперименталь-ными кривыми скольжения и
- 179. Детали машин Кривые скольжения Кривые скольжения получают на испытательных стендах для типовых условий: скорость ремня V
- 180. Детали машин Допускаемые напряжения в ремне При φ = φmax наблюдается полное буксование ремня на ведущем
- 181. Детали машин Корректирующие коэффициенты где Cα – коэффициент, учитывающий влияние угла обхвата ведущего шкива, Cα =
- 182. Детали машин Приведенное полезное напряжение Величина приведенного полезного напряжения зависит от типа ремня. Для резинотканевых ремней
- 183. Детали машин Расчет плоских ремней на долговечность Расчет ремня на долговечность выполняют по формуле σmax ≤
- 184. Детали машин Расчет плоских ремней на долговечность Сu – коэффициент, учитывающий влияние передаточного числа на напряжение
- 185. Детали машин Расчет плоских ремней на долговечность Окончательное выражение для определения долговечности ремня имеет вид Рекомендуемая
- 186. Детали машин Приведенный коэффициент трения клинового ремня Клиновые ремни и ребра поликлиновых ремней име-ют трапецеидальное сече-ние,
- 187. Детали машин Клиновые ремни Выпускают клиновые ремни нормально-го и узкого сечений. Стандартом предусмо-трено шесть нормальных сечений
- 188. Детали машин Расчет клиновых ремней Тип сечения клинового ремня и его геометрические разме-ры выбирают по табл.
- 189. Детали машин Расчет клиновых ремней Расчетное число ремней предварительно определяют по формуле где Ft – окружное
- 190. Детали машин Расчет поликлиновых ремней Параметры поликлиновых ремней приведены в табл., в ко-торой приняты следующие обозначения:
- 191. Детали машин Расчет поликлиновых ремней CL– коэффициент, учитывающий длину ремня; Cd – коэффициент, учитывающий диаметр ведущего
- 192. Детали машин Лекция 11. Цепные передачи Общие положения Цепи и звездочки Геометрические и кинематические параметры цепных
- 193. Детали машин Цепные передачи Цепная передача относится к передачам зацеплением с гибкой связью. Она состоит (см.
- 194. Детали машин Цепные передачи К недостаткам цепной передачи относятся. 1. Вытягивание цепи вследствие износа шарниров. 2.
- 195. Детали машин Приводные цепи Наибольшее применение находят приводные роликовые цепи (см. рис.). Они состоят из наружных
- 196. Детали машин Приводные цепи Отличие втулочных цепей от роликовых заключается в том, что втулочные цепи не
- 197. Детали машин Зубчатые цепи Зубчатые цепи состоят из набора пластин. Каждая пластина имеет два зуба, взаимодействующие
- 198. Детали машин Звездочки Профилирование звездочек роликовых цепей выполняют по ГОСТ 591-69. Шарниры звеньев цепи, находящихся в
- 199. Детали машин Звездочки Рабочая часть профиля зуба состоит из двух радиальных участков, между которыми располагается переходный
- 200. Детали машин Геометрические и кинематические параметры цепных передач Основным параметром цепной передачи является ее шаг t,
- 201. Детали машин Геометрические и кинематические параметры цепных передач Рекомендуемый диапазон для выбора межосевого расстояния a =
- 202. Детали машин Критерии работоспособности и расчета передач роликовой цепью Основные причины выхода из строя цепных передач.
- 203. Детали машин Критерии работоспособности и расчета передач роликовой цепью где Kэ – коэффициент эксплуатации; Ft –
- 204. Детали машин Критерии работоспособности и расчета передач роликовой цепью Kр – коэффициент, учитывающий способ регулирования натяже-ния
- 205. Детали машин Определение шага роликовой цепи Выразим окружное усилие через крутящий момент на веду-щей звездочке T1:
- 206. Детали машин Проверочный расчет передачи Для выбранного шага проверяют выполнение условия n1 ≤ n1max, где n1
- 207. Детали машин Проверочный расчет передачи Условие статической прочности цепи Сила, нагружающая валы передачи, Fb = kb
- 208. Детали машин Расчет передачи зубчатой цепью Расчетная ширина цепи где P1 – мощность на валу ведущей
- 209. Детали машин Лекция 12. Валы и оси Общие положения Проектный расчет и конструирование вала Расчет вала
- 210. Детали машин Валы и оси Валы и оси служат для установки на них вращающихся дета-лей. Валы
- 211. Детали машин Проектный расчет и конструирование вала Большинство валов изготавливают из сталей 45, 40Х. Легированные стали
- 212. Детали машин Проектный расчет и конструирование вала где Т – крутящий момент в опасном сечении вала,
- 213. Детали машин Составление расчетной схемы вала По эскизной компоновке составляют расчетную схему вала, заменяя вал балкой
- 214. Детали машин Определение консольной нагрузки Для редукторов консольную нагрузку предварительно определяют по формулам ГОСТ Р50891-96, в
- 215. Детали машин Выбор опасного сечения вала После приложения всех сил в соответствующих плоскостях опреде-ляют реакции опор
- 216. Детали машин Расчет вала на усталостную прочность Экспериментально установлено, что наиболее вероятным видом разрушения вала является
- 217. Детали машин Циклы напряжений Основными параметрами цикла напряжений являются амплитуда σa и среднее напряжение σm, под
- 218. Детали машин Амплитудные и средние значения цикла напряжений Постоянные по величине изгибающие моменты вызывают во вращающемся
- 219. Детали машин Амплитудные и средние значения цикла напряжений, предел выносливости Для отнулевого цикла запишем τa =
- 220. Детали машин Предел выносливости Для симметричного цикла напряжений R= –1 и пределы выносливости по нормальным напряжениям
- 221. Детали машин Переход от пределов выносливости образца к пределам выносливости детали Для учета перечисленных факторов эквивалентные
- 222. Детали машин Переход от пределов выносливости образца к пределам выносливости детали εσ и ετ– коэффициенты влияния
- 223. Детали машин Переход от пределов выносливости образца к пределам выносливости детали Значения Kσ и Kτ для
- 224. Детали машин Учет шероховатости поверхности При кручении и изгибе вала наибольшие напряжения действуют на его поверхности.
- 225. Детали машин Коэффициенты запаса прочности Для определения коэффициентов запаса прочности по нор-мальным и касательным напряжениям используются
- 226. Детали машин Расчет вала на статическую прочность Расчет выполняют по наибольшей возможной кратковременной нагрузке. Поскольку в
- 227. Детали машин Расчет вала на жесткость Упругие перемещения вала отрицательно влияют на работу связанных с валом
- 228. Детали машин Изгибная жесткость вала Деформацию вала при изгибе численно оценивают прогибом y и углом поворота
- 229. Детали машин Крутильная жесткость вала Крутильную жесткость вала, состоящего из n участков, определяют по формуле где
- 230. Детали машин Расчет вала на колебания Колебания валов связаны с периодическими изменениями передаваемой нагрузки и неуравновешенностью
- 231. Детали машин Расчет вала на колебания На вал действует центробежная сила, вызывающая прогиб вала y в
- 232. Детали машин Расчет вала на колебания Как следует из полученного выражения, при стремлении ωв к ωс
- 233. Детали машин Лекция 13. Подшипники качения Общие положения Классификация и условные обозначения Характеристики подшипников основных типов
- 234. Детали машин Подшипники качения Подшипники качения являются основным видом опор для вращающихся деталей. Типовую конструкцию подшип-ника
- 235. Детали машин Материалы деталей подшипников Детали подшипников воспринимают значительные контактные нагрузки. Кольца и тела качения изготавливают
- 236. Детали машин Классификация и условные обозначения Подшипники качения классифицируют по следующим признакам: 1) по форме тел
- 237. Детали машин Классификация и условные обозначения 2) по направлению воспринимаемой нагрузки различают подшип-ники: радиальные, предназначенные для
- 238. Детали машин Условные обозначения подшипников Нули, стоящие левее последней значащей цифры, не простав-ляют. Для подшипника с
- 239. Детали машин Условные обозначения подшипников Четвертая цифра справа обозначает тип подшипника: Шариковый радиальный однорядный……….....................0 Шариковый радиальный
- 240. Детали машин Условные обозначения подшипников Кроме основного обозначения подшипник может содержать дополнительные обозначения. В частности, слева
- 241. Детали машин Характеристики подшипников основных типов Шариковый радиальный однорядный подшипник (рис. а) предназначен в основном для
- 242. Детали машин Характеристики подшипников основных типов Роликовый радиальный подшипник с короткими цилиндрическими роликами (рис. д) предназначен
- 243. Детали машин Распределение нагрузки между телами качения Радиальная нагрузка Fr, дейст-вующая на подшипник (см. рис.), неравномерно
- 244. Детали машин Определение наибольшей нагрузки на тело качения Для шарикоподшипников сближение тела качения и кольца под
- 245. Детали машин Характер нагружения деталей подшипников Даже при постоянной радиальной нагрузке на подшипник тела качения и
- 246. Детали машин Виды разрушения подшипников Основной причиной разрушения подшипников качения при хорошей смазке и защите от
- 247. Детали машин Критерии расчета подшипников Основными видами расчета подшипников качения являются расчет на долговечность по динамической
- 248. Детали машин Статическая грузоподьемность Базовая статическая грузоподъемность C0 – это такая постоянная нагрузка, которая соответствует максималь-ным
- 249. Детали машин Расчет на долговечность по динамической грузоподъемности Расчет по динамической грузоподъемности выполняют при частоте вращения
- 250. Детали машин Эквивалентная динамическая нагрузка и расчетный ресурс Для учета реальных условий работы подшипника силу Fr
- 251. Детали машин Эквивалентная динамическая нагрузка и расчетный ресурс Базовый расчетный ресурс соответствует 90% надеж-ности подшипника, изготовленного
- 252. Детали машин Эквивалентная динамическая нагрузка X – коэффициент радиальной нагрузки; Y – коэффициент осевой нагрузки; Kб
- 253. Детали машин Коэффициенты радиальной и осевой нагрузок Коэффициенты X и Y зависят от типа подшипника и
- 254. Детали машин Требуемый ресурс подшипника Если Fa / (VFr)≤ e, то осевая нагрузка не оказывает влияния
- 255. Детали машин Особенности расчета радиально-упорных подшипников При составлении расчетной схемы вала центр шарнирной опоры, заменяющей радиально-упорный
- 256. Детали машин Особенности расчета радиально-упорных подшипников Расстояние между центром опоры и торцом подшипника для радиально-упорных шариковых
- 257. Детали машин Особенности расчета радиально-упорных подшипников При нагружении радиально-упорного подшипника ради-альной нагрузкой Fri возникает осевая составляющая
- 258. Детали машин Особенности расчета радиально-упорных подшипников Осевую составляющую Si необходимо учитывать при определении осевой силы ,
- 259. Детали машин Эквивалентная нагрузка при переменных режимах работы Подшипники, работающие при переменных режимах, подбирают по эквивалентной
- 260. Детали машин Расчет подшипников по статической грузоподъемности Расчет по статической грузоподъемности выполняют при малых частотах вращения
- 261. Детали машин Лекция 14. Шпоночные и шлицевые соединения Назначение и конструкции шпоночных соединений Расчет шпоночных соединений
- 262. Детали машин Назначение и конструкции шпоночных соединений Шпонки служат для передачи крутящего момента от вала к
- 263. Детали машин Призматические шпонки Призматические шпонки являются наиболее распрос-траненным типом шпонок. Они выполняются врезными. Примерно половина
- 264. Детали машин Призматические шпонки Обыкновенные шпонки предназначены для неподвижных соединений. Различают обыкновенные призматические шпонки по ГОСТ
- 265. Детали машин Призматические шпонки Для наиболее массовой шпонки по ГОСТ 23360-78 предусмотрено три исполнения (см. рис.).
- 266. Детали машин Призматические шпонки Направляющие шпонки по ГОСТ 8790-79 (рис. а) применяют для подвижных соединений. В
- 267. Детали машин Сегментные шпонки Сегментные шпонки по ГОСТ 24071-80 являются наиболее технологичными с точки зрения изготовления
- 268. Детали машин Клиновые шпонки Клиновые шпонки имеют уклон 1:100 по грани, взаимодействующей со ступицей. Такой же
- 269. Детали машин Клиновые шпонки Такой способ формирования соединения приводит к наиболее существенному недостатку, связанному с использованием
- 270. Детали машин Расчет призматических шпонок При передаче крутящего момента шпонка работает на срез и на смятие
- 271. Детали машин Расчет призматических шпонок Шпонка передает окружную силу Ft: Ft = 2000T/d, где T –
- 272. Детали машин Расчет призматических шпонок В случае неподвижных соединений для стальных ступиц при нереверсивном приводе принимают
- 273. Детали машин Шлицевые соединения Шлицевые соединения образуются при наличии наружных зубьев на валу и впадин в
- 274. Детали машин Ппрямобочные соединения Стандартизованы два типа шлицевых соединений: прямобочные по ГОСТ 1139-80 и эвольвентные по
- 275. Детали машин Способы центрирования прямобочных соединений Для прямобочных соединений используют три способа центрирования (см. рис.). В
- 276. Детали машин Соединения с эвольвентным профилем зубьев Считаются наиболее перс-пективными при больших диаметрах валов. Стандарти-зованы для
- 277. Детали машин Расчет шлицевых соединений Основными критериями работоспособности шлицевых соединений являются сопротивление смятию и изнашиванию рабочих
- 278. Детали машин Расчет шлицевых соединений dср – средний диаметр соединения; h – рабочая высота зубьев; lр
- 279. Детали машин Лекция 15. Соединения с натягом Основные понятия Способы получения соединений Расчет соединений с натягом
- 280. Детали машин Соединения с натягом, основные понятия Соединения деталей с натягом находят широкое применение в машиностроении.
- 281. Детали машин Соединения с натягом, основные понятия Соединения способны передавать осевые усилия, крутящие и изгибающие моменты
- 282. Детали машин Соединения с натягом, основные понятия Диаметральный натяг N = 2δ = 2(u1 + u2).
- 283. Детали машин Способы получения соединений здесь E1, E2, μ1 и μ2 – соответственно модули упругости и
- 284. Детали машин Тепловая сборка При тепловой сборке предварительно производят нагрев охватывающей детали, охлаждение охватываемой детали либо
- 285. Детали машин Расчет соединений с натягом В случае нагружения соединения осевой силой Fa и крутя-щим моментом
- 286. Детали машин Расчет соединений с натягом По закону Кулона сила трения пропорциональна нормаль-ному давлению: Fтр =
- 287. Детали машин Расчет соединений при передаче M Для уравновешивания момента давление p на контактной поверхности соединения
- 288. Детали машин Расчет давления из условия нераскрытия стыка Величина R пропорциональна давлению p на контактной поверхности
- 289. Детали машин Поправки на способ сборки и температурные деформации При сборке соединения запрессовкой микронеровности по-садочных поверхностей
- 290. Детали машин Минимальный требуемый натяг Минимальный требуемый натяг, необходимый для переда-чи нагрузки, [N]min = N +
- 291. Детали машин Наибольшие эквивалентные напряжения Эпюры напряжений в поперечном сечении деталей соединения показаны на рис. Знак
- 292. Детали машин Максимальный допустимый натяг Следовательно, максимальное допустимое по условию проч-ности вала давление равно pmax1 =
- 293. Детали машин Выбор стандартной посадки Значения [N]min и [N]max являются ограничениями при выборе стандартной посадки, которая
- 294. Детали машин Концентрация напряжений в соединениях с натягом Экспериментально установлено, что давления в прессовом соединении нерав-номерно
- 295. Детали машин Лекция 16. Резьбовые соединения Общие положения Геометрические параметры резьбы Классы прочности и материалы резьбовых
- 296. Детали машин Общие положения Резьбовые соединения являются наиболее распростра-ненными разъемными соединениями. Их образуют болты, винты, шпильки,
- 297. Детали машин Классификация резьб по назначению В зависимости от назначения резьбы делят на крепежные, крепежно-уплотняющие и
- 298. Детали машин Геометрические параметры резьбы Основными геометричес-кими параметрами цилин-дрической резьбы являются (см. рис.): d − номинальный
- 299. Детали машин Метрические резьбы Основной крепежной резьбой является метрическая резьба. Профиль резьбы представляет собой равносторонний треугольник
- 300. Детали машин Виды резьбовых соединений Основными видами резьбовых соединений являются винты с гайками (рис. а) (в
- 301. Детали машин Виды резьбовых соединений Винтовые соединения применяют при достаточной толщине детали для размещения резьбового отверстия,
- 302. Детали машин Классы прочности При изготовлении стальных винтов, болтов и шпилек предусмотрено 12 классов прочности, частично
- 303. Детали машин Силовые соотношения в винтовой паре Для вывода основных соотношений рассмотрим винтовую пару с прямоугольной
- 304. Детали машин Силовые соотношения в винтовой паре Сила трения Fтр по закону Кулона пропорциональна силе нормального
- 305. Детали машин Условия самоторможения резьбы Для метрической резьбы приведенный угол трения φ’ изменяется в зависимости от
- 306. Детали машин Способы стопорения Известные способы стопорения базируются на одном из трех принципов стопорения. 1. Реализация
- 307. Детали машин Способы стопорения 2. Жесткое соединение гайки с винтом, например, с помощью шплинта (рис. а),
- 308. Детали машин Распределение осевой нагрузки между витками резьбы Осевая нагрузка с винта на гайку передается через
- 309. Детали машин Распределение осевой нагрузки между витками резьбы Нижний виток воспринимает 34% общей осевой нагрузки, в
- 310. Детали машин Лекция 17. Резьбовые соединения Расчет незатянутого болтового соединения, нагруженного внешней осевой силой Расчет затянутого
- 311. Детали машин Расчеты на прочность Основными видами разрушения резьбовых изделий явля-ются: разрыв резьбовой части стержня при
- 312. Детали машин Расчет незатянутого болтового соединения, нагруженного внешней осевой силой Принимают, что опасное поперечное сечение болта
- 313. Детали машин Расчет затянутого болтового соединения, не нагруженного внешней осевой силой При затяжке соединения болт испытывает
- 314. Детали машин Расчет затянутого болтового соединения, не нагруженного внешней осевой силой После подстановки значений σр, τк
- 315. Детали машин Расчет затянутого болтового соединения, нагруженного внешней осевой силой Предварительная затяжка болта усилием Q должна
- 316. Детали машин Расчет затянутого болтового соединения, нагруженного внешней осевой силой Усилия, нагружающие болт и детали стыка
- 317. Детали машин Расчет затянутого болтового соединения, нагруженного внешней осевой силой Для нормальной работы соединения должно выполняться
- 318. Детали машин Расчет болтового соединения, нагруженного силами, сдвигающими детали в стыке Возможно два варианта конструкции таких
- 319. Детали машин Расчет болтового соединения, нагруженного силами, сдвигающими детали в стыке Условие отсутствия сдвига деталей представим
- 320. Детали машин Расчет болтового соединения, нагруженного силами, сдвигающими детали в стыке Условие прочности по напряжениям среза
- 321. Детали машин Расчет болтов при эксцентричном приложении нагрузки Эксцентричная нагрузка возникает в специальных болтах с эксцентричной
- 322. Детали машин Расчет болтов при эксцентричном приложении нагрузки Наибольшее суммарное напряжение σЕ = 1.3 σр +
- 323. Детали машин Расчет болтов при эксцентричном приложении нагрузки При перекосе опорных поверхностей под гайку или головку
- 324. Детали машин Расчет группы болтов Расчет сводится к определению расчетной нагрузки для наиболее нагруженного болта и
- 325. Детали машин Расчет группы болтов Случай 2. Равнодействующая нагрузка лежит в плоскости стыка Примером служит крепление
- 326. Детали машин Расчет группы болтов FT1/r1= FT2/r2=…= FTn/rn = q, где q − удельная нагрузка, приходящаяся
- 327. Детали машин Расчет группы болтов Случай 3. Нагрузка соединения раскрывает стык Последовательность решения для этого случая
- 328. Детали машин Расчет группы болтов Сила R1 и момент M раскрывают стык, а сила R2 сдвигает
- 329. Детали машин Расчет группы болтов Экспериментально установлено, что напряжения в стыке под действием момента M изменяются
- 330. Детали машин Расчет группы болтов Расчет по условию отсутствия смещения деталей в стыке Если не предусмотрены
- 331. Детали машин Расчет группы болтов где FR = R1/z − внешняя нагрузка от силы R1; FM
- 332. Детали машин Клеммовые соединения Клеммовые соединения применяют для закреп-ления деталей на глад-ких валах. Передача на-грузки с
- 333. Детали машин Клеммовые соединения Основными достоинствами клеммовых соединений являются: простота сборки и разборки, предохранение от перегрузок,
- 334. Детали машин Клеммовые соединения Из полученных выражений после преобразований определим R = KT/(fd). При посадке клеммы
- 335. Детали машин Лекция 18. Сварные соединения Общие положения Классификация сварных соединений Расчет соединений на прочность
- 336. Детали машин Общие положения Сварные соединения образуются за счет сил молекулярного сцепления в результате местного нагрева
- 337. Детали машин Общие положения. Способы сварки Недостатки сварных соединений: коробление деталей из-за неравномерности нагрева в процессе
- 338. Детали машин Способы сварки 2. Автоматическая электродуговая сварка под флюсом. Производится на сварочных установках, в 10…20
- 339. Детали машин Классификация сварных соединений В зависимости от взаимного расположения соединяемых деталей применяют следующие основные типы
- 340. Детали машин Классификация сварных соединений Нахлесточные соединения выполняют угловыми шва-ми (см. рис.). В зависи-мости от ориентации
- 341. Детали машин Классификация сварных соединений Тавровые соединения используют для сварки деталей, расположенных во взаим-но перпендикулярных плоскостях.
- 342. Детали машин Рекомендации для конструирования сварных соединений 1. Минимальная длина шва должна быть не менее 30
- 343. Детали машин Расчет соединений на прочность Основным требованием при проектировании сварных кон-струкций является обеспечение равнопрочности шва
- 344. Детали машин Расчет стыковых швов Допускаемые напряжения для металла шва равны: [σ’] = φ[σр], где [σр]
- 345. Детали машин Расчет угловых швов Нахлесточные соединения Угловые швы рассчитывают на срез в опасном сечении, совпадающем
- 346. Детали машин Соединение, нагруженное моментом в плоскости стыка Если соединение нагружено моментом T в плоскости стыка
- 347. Детали машин Соединение, нагруженное моментом в плоскости стыка При нагружении моментом соединения с лобовым швом (рис.
- 348. Детали машин Соединение, нагруженное моментом и силой При нагружении соединения силой и моментом T пользуются принципом
- 349. Детали машин Соединение, нагруженное моментом и силой Для соединения, показанного на рис. б, растягивающие напряжения от
- 351. Скачать презентацию

Детали машин
Основные понятия и определения
Детали машин и основы конструирования является первым
Детали машин
Основные понятия и определения
Детали машин и основы конструирования является первым

Детали машин
Предмет изучения
Среди большого разнообразия деталей и узлов машин выделяют
Детали машин
Предмет изучения
Среди большого разнообразия деталей и узлов машин выделяют

Детали машин
Структура курса
Процесс разработки конструкции любой машины состоит из ряда последовательных
Детали машин
Структура курса
Процесс разработки конструкции любой машины состоит из ряда последовательных

Детали машин
Основные требования к машинам
Работоспособность, надежность, технологичность, экономичность, удобство и
Детали машин
Основные требования к машинам
Работоспособность, надежность, технологичность, экономичность, удобство и

Детали машин
Критерии работоспособности деталей
Главным требованием, предъявляемым к любой детали, является сохранение
Детали машин
Критерии работоспособности деталей
Главным требованием, предъявляемым к любой детали, является сохранение

Детали машин
Прочность
Прочность − это способность сопротивляться разрушению при действии заданной нагрузки.
Детали машин
Прочность
Прочность − это способность сопротивляться разрушению при действии заданной нагрузки.

Детали машин
Допускаемые напряжения
При статических нагрузках допускаемые нормальные напряжения определяют по формуле
Детали машин
Допускаемые напряжения
При статических нагрузках допускаемые нормальные напряжения определяют по формуле

Детали машин
Коэффициент запаса прочности
Коэффициент запаса прочности получают как произведение частных
Детали машин
Коэффициент запаса прочности
Коэффициент запаса прочности получают как произведение частных

Детали машин
Жесткость
Жесткость − это способность сопротивляться деформациям при действии заданной
Детали машин
Жесткость
Жесткость − это способность сопротивляться деформациям при действии заданной

Детали машин
Износостойкость
Износостойкость – это способность сопротивляться износу. Под износом понимают
Детали машин
Износостойкость
Износостойкость – это способность сопротивляться износу. Под износом понимают

Детали машин
Теплостойкость
Теплостойкость – сохранение работоспособности при переменных температурах. Нагрев деталей
Детали машин
Теплостойкость
Теплостойкость – сохранение работоспособности при переменных температурах. Нагрев деталей

Детали машин
Виброустойчивость
Виброустойчивость – способность сопротивляться вибра-циям. Появление вибраций при работе
Детали машин
Виброустойчивость
Виброустойчивость – способность сопротивляться вибра-циям. Появление вибраций при работе

Детали машин
Виды расчетов
В инженерной практике встречаются два вида расчетов: проектный
Детали машин
Виды расчетов
В инженерной практике встречаются два вида расчетов: проектный

Детали машин
Машиностроительные материалы
Для изготовления деталей в машиностроении широко используются стали, чугуны,
Детали машин
Машиностроительные материалы
Для изготовления деталей в машиностроении широко используются стали, чугуны,

Детали машин
Углеродистые стали
Наиболее широко применяются стали обыкновенного каче-ства. Из них изготавливают
Детали машин
Углеродистые стали
Наиболее широко применяются стали обыкновенного каче-ства. Из них изготавливают

Детали машин
Легированные стали и сплавы
Низкоуглеродистые стали хорошо поддаются пластической деформации, среднеуглеродистые
Детали машин
Легированные стали и сплавы
Низкоуглеродистые стали хорошо поддаются пластической деформации, среднеуглеродистые

Детали машин
Термообработка сталей
Для придания стали требуемых свойств выполняют термическую обработку, состоящую
Детали машин
Термообработка сталей
Для придания стали требуемых свойств выполняют термическую обработку, состоящую

Детали машин
Химико-термическая обработка сталей
Отпуск обычно применяют после закалки стальных отливок, поковок,
Детали машин
Химико-термическая обработка сталей
Отпуск обычно применяют после закалки стальных отливок, поковок,

Детали машин
Чугуны
Чугуном называют железоуглеродистый сплав с содержанием углерода свыше 2%. Чугуны
Детали машин
Чугуны
Чугуном называют железоуглеродистый сплав с содержанием углерода свыше 2%. Чугуны

Детали машин
Сплавы цветных металлов
Из сплавов цветных металлов наиболее широко в машиностроении
Детали машин
Сплавы цветных металлов
Из сплавов цветных металлов наиболее широко в машиностроении

Детали машин
Сплавы цветных металлов
Баббиты – сплавы на основе олова, свинца и
Детали машин
Сплавы цветных металлов
Баббиты – сплавы на основе олова, свинца и

Детали машин
Лекция 2.
Механические передачи
Понятие о механических передачах
Классификация механических передач вращательного
Детали машин
Лекция 2.
Механические передачи
Понятие о механических передачах
Классификация механических передач вращательного

Детали машин
Общее определение
Передачей называется устройство, передающее энергию на расстояние, обычно с
Детали машин
Общее определение
Передачей называется устройство, передающее энергию на расстояние, обычно с

Детали машин
Основные функции механических передач
согласование угловых скоростей двигателя и исполнительного органа
Детали машин
Основные функции механических передач
согласование угловых скоростей двигателя и исполнительного органа

Детали машин
Классификация механических передач
Передачи вращательного движения
Передачи зацеплением
Передачи трением
зубчатые
червячные
фрикционные
ременные
цепные
передачи гибкой
Детали машин
Классификация механических передач
Передачи вращательного движения
Передачи зацеплением
Передачи трением
зубчатые
червячные
фрикционные
ременные
цепные
передачи гибкой

Детали машин
Основные кинематические и энергетические зависимости
Кинематической характеристикой передачи является
Детали машин
Основные кинематические и энергетические зависимости
Кинематической характеристикой передачи является

Детали машин
КПД и крутящие моменты
Важной характеристикой передачи является ее коэффи-циент
Детали машин
КПД и крутящие моменты
Важной характеристикой передачи является ее коэффи-циент

Детали машин
Типы передач
Цилиндрические зубчатые передачи применяются для передачи вращения между валами
Детали машин
Типы передач
Цилиндрические зубчатые передачи применяются для передачи вращения между валами

Детали машин
Реечная передача
Разновидностью цилиндрической зубчатой передачи является реечная передача, состоящая из
Детали машин
Реечная передача
Разновидностью цилиндрической зубчатой передачи является реечная передача, состоящая из

Детали машин
Напряжения в зубьях
При передаче крутящего момента на зуб действует
Детали машин
Напряжения в зубьях
При передаче крутящего момента на зуб действует

Детали машин
Характер изменения напряжений в зубьях
Напряжения σH и σF
Детали машин
Характер изменения напряжений в зубьях
Напряжения σH и σF

Детали машин
Поломка зуба
Поломка зуба наиболее опасный вид разрушения, приводящий не только
Детали машин
Поломка зуба
Поломка зуба наиболее опасный вид разрушения, приводящий не только

Детали машин
Выкрашивание рабочих поверхностей зубьев
Выкрашивание - основной вид разрушения зубьев для
Детали машин
Выкрашивание рабочих поверхностей зубьев
Выкрашивание - основной вид разрушения зубьев для

Детали машин
Абразивный износ
Абразивный износ является основным видом разрушения зубьев открытых передач.
Детали машин
Абразивный износ
Абразивный износ является основным видом разрушения зубьев открытых передач.

Детали машин
Заедание зубьев
Заедание зубьев проявляется в приваривании частиц материала одного
Детали машин
Заедание зубьев
Заедание зубьев проявляется в приваривании частиц материала одного

Детали машин
Выбор материалов зубчатых колес и способов термообработки
Выбор материалов зубчатых колес
Детали машин
Выбор материалов зубчатых колес и способов термообработки
Выбор материалов зубчатых колес

Детали машин
Колеса второй группы
Вторая группа – зубчатые колеса с твердостью поверхности
Детали машин
Колеса второй группы
Вторая группа – зубчатые колеса с твердостью поверхности

Детали машин
Объемная закалка
Наиболее простой способ получения высокой твердости зубьев. Применяют
Детали машин
Объемная закалка
Наиболее простой способ получения высокой твердости зубьев. Применяют

Детали машин
Поверхностная закалка ТВЧ
Поверхностная закалка ТВЧ обеспечивает поверхностную твердость зуба 48…55
Детали машин
Поверхностная закалка ТВЧ
Поверхностная закалка ТВЧ обеспечивает поверхностную твердость зуба 48…55

Детали машин
Цементация
Цементация – насыщение углеродом поверхностного слоя с последующей закалкой. Обеспечивает
Детали машин
Цементация
Цементация – насыщение углеродом поверхностного слоя с последующей закалкой. Обеспечивает

Детали машин
Азотирование
Азотирование – насыщение азотом поверхностного слоя. Обеспечивает высокую твердость 58…65
Детали машин
Азотирование
Азотирование – насыщение азотом поверхностного слоя. Обеспечивает высокую твердость 58…65

Детали машин
Нитроцементация
Нитроцементация – одновременное насыщение поверх-ностного слоя углеродом и азотом с
Детали машин
Нитроцементация
Нитроцементация – одновременное насыщение поверх-ностного слоя углеродом и азотом с

Детали машин
Выбор материалов зубчатых колес
Выбор материалов зубчатых колес осуществляют по
Детали машин
Выбор материалов зубчатых колес
Выбор материалов зубчатых колес осуществляют по

Детали машин
Выбор материалов зубчатых колес
Детали машин
Выбор материалов зубчатых колес

Детали машин
Рекомендуемые материалы зубчатых колес
Марки сталей одинаковы для колеса и
Детали машин
Рекомендуемые материалы зубчатых колес
Марки сталей одинаковы для колеса и

Детали машин
Лекция 3.
Расчет на прочность цилиндрических зубчатых передач
Виды расчетов зубчатых
Детали машин
Лекция 3.
Расчет на прочность цилиндрических зубчатых передач
Виды расчетов зубчатых

Детали машин
Виды расчетов зубчатых передач
Основой для расчета на прочность цилиндрических
Детали машин
Виды расчетов зубчатых передач
Основой для расчета на прочность цилиндрических

Детали машин
Допускаемые напряжения в расчетах на выносливость
Для расчета допускаемых напряжений при
Детали машин
Допускаемые напряжения в расчетах на выносливость
Для расчета допускаемых напряжений при

Детали машин
Допускаемые контактные напряжения
Наклонный участок кривой усталости аппроксимируется зависимостью
где σHlim
Детали машин
Допускаемые контактные напряжения
Наклонный участок кривой усталости аппроксимируется зависимостью
где σHlim

Детали машин
Коэффициент долговечности
Для определения KHL используют зависимость
Если NHE > NH0,
Детали машин
Коэффициент долговечности
Для определения KHL используют зависимость
Если NHE > NH0,

Детали машин
Суммарное число циклов напряжений
Суммарное число циклов при постоянной частоте вращения
Детали машин
Суммарное число циклов напряжений
Суммарное число циклов при постоянной частоте вращения

Детали машин
Определение коэффициентов эквивалентности
Если задана циклограмма нагружения
зубчатой передачи (см.
Детали машин
Определение коэффициентов эквивалентности
Если задана циклограмма нагружения
зубчатой передачи (см.

Детали машин
Типовые режимы нагружения
Для перехода к типовому режиму циклограмму
Детали машин
Типовые режимы нагружения
Для перехода к типовому режиму циклограмму

Детали машин
Коэффициенты эквивалентности для типовых режимов нагружения
Значения коэффициентов эквивалентности для
Детали машин
Коэффициенты эквивалентности для типовых режимов нагружения
Значения коэффициентов эквивалентности для

Детали машин
Порядок расчета допускаемых контактных напряжений
Коэффициент безопасности принимают:
SH =
Детали машин
Порядок расчета допускаемых контактных напряжений
Коэффициент безопасности принимают:
SH =

Детали машин
Допускаемые напряжения изгиба
При расчете зубьев на выносливость по
Детали машин
Допускаемые напряжения изгиба
При расчете зубьев на выносливость по

Детали машин
Допускаемые напряжения изгиба
Формулы для определения σF lim , значения
Детали машин
Допускаемые напряжения изгиба
Формулы для определения σF lim , значения

Детали машин
Числа циклов при изгибе
Базовое число циклов NFO = 4·106.
Эквивалентное число
Детали машин
Числа циклов при изгибе
Базовое число циклов NFO = 4·106.
Эквивалентное число

Детали машин
Допускаемые контактные напряжения при действии пиковых нагрузок
Под пиковыми
Детали машин
Допускаемые контактные напряжения при действии пиковых нагрузок
Под пиковыми

Детали машин
Допускаемые напряжения изгиба при действии пиковых нагрузок
Допускаемые напряжения изгиба
Детали машин
Допускаемые напряжения изгиба при действии пиковых нагрузок
Допускаемые напряжения изгиба

Детали машин
Лекция 4.
Расчет на выносливость по контактным напряжениям
Задача Герца
Вывод формул
Детали машин
Лекция 4.
Расчет на выносливость по контактным напряжениям
Задача Герца
Вывод формул

Детали машин
Задача Герца для случая контакта двух цилиндров
Контактная прочность зубьев
Детали машин
Задача Герца для случая контакта двух цилиндров
Контактная прочность зубьев

Детали машин
Контактные напряжения при взаимодействии двух цилиндров
Первоначальный контакт цилиндров осуществляется
Детали машин
Контактные напряжения при взаимодействии двух цилиндров
Первоначальный контакт цилиндров осуществляется

Детали машин
Контактные напряжения при взаимодействии двух цилиндров
E1 и E2 – модули
Детали машин
Контактные напряжения при взаимодействии двух цилиндров
E1 и E2 – модули

Детали машин
Контактные напряжения в зацеплении
Радиусы цилиндров в формуле Герца заменяют
Детали машин
Контактные напряжения в зацеплении
Радиусы цилиндров в формуле Герца заменяют

Детали машин
Контактные напряжения в зацеплении
Cилу Fn, нормальную к профилям, определим
Детали машин
Контактные напряжения в зацеплении
Cилу Fn, нормальную к профилям, определим

Детали машин
Контактные напряжения при взаимодействии зубьев
Подставим полученные зависимости в формулу
Детали машин
Контактные напряжения при взаимодействии зубьев
Подставим полученные зависимости в формулу

Детали машин
Контактные напряжения при взаимодействии зубьев
Принимая αw=20°, εα = 1,6, для
Детали машин
Контактные напряжения при взаимодействии зубьев
Принимая αw=20°, εα = 1,6, для

Детали машин
Проектный расчет передачи на выносливость по контактным напряжениям
Выразим bw2
Детали машин
Проектный расчет передачи на выносливость по контактным напряжениям
Выразим bw2

Детали машин
Расчет геометрических параметров передачи
Полученное значение aw округляют до ближайшей
Детали машин
Расчет геометрических параметров передачи
Полученное значение aw округляют до ближайшей

Детали машин
Числа зубьев, передаточное число
Ширину венца шестерни принимают на 2…5
Детали машин
Числа зубьев, передаточное число
Ширину венца шестерни принимают на 2…5

Детали машин
Диаметры окружностей зубчатых колес
Делительные окружности d1 = mz1/cos β, d2
Детали машин
Диаметры окружностей зубчатых колес
Делительные окружности d1 = mz1/cos β, d2

Детали машин
Проверочный расчет передачи на выносливость по контактным напряжениям
Условие контактной прочности
Детали машин
Проверочный расчет передачи на выносливость по контактным напряжениям
Условие контактной прочности

Детали машин
Определение коэффициента KHα
Для определения KНα используют эмпирическую формулу
Детали машин
Определение коэффициента KHα
Для определения KНα используют эмпирическую формулу

Детали машин
Определение коэффициента KHβ
Для учета приработки зубьев рассматривают два значения
Детали машин
Определение коэффициента KHβ
Для учета приработки зубьев рассматривают два значения

Детали машин
Определение коэффициента KHV
Динамический коэффициент KНV позволяет учесть внутреннюю динамическую
Детали машин
Определение коэффициента KHV
Динамический коэффициент KНV позволяет учесть внутреннюю динамическую

Детали машин
Лекция 5.
Расчет на выносливость по напряжениям изгиба и на
Детали машин
Лекция 5. Расчет на выносливость по напряжениям изгиба и на

Детали машин
Расчет на выносливость по напряжениям изгиба
ают. Силу Fn переносят по
Детали машин
Расчет на выносливость по напряжениям изгиба
ают. Силу Fn переносят по

Детали машин
Расчет на выносливость по напряжениям изгиба
Напряжения изгиба и сжатия
Детали машин
Расчет на выносливость по напряжениям изгиба
Напряжения изгиба и сжатия

Детали машин
Расчет на выносливость по напряжениям изгиба
Расчетное напряжение с учетом
Детали машин
Расчет на выносливость по напряжениям изгиба
Расчетное напряжение с учетом

Детали машин
Коэффициент формы зуба
Зависимость формы зуба от числа зубьев представлена
Детали машин
Коэффициент формы зуба
Зависимость формы зуба от числа зубьев представлена

Детали машин
Коэффициент нагрузки при изгибе
Выражение для определения коэффициента нагрузки при
Детали машин
Коэффициент нагрузки при изгибе
Выражение для определения коэффициента нагрузки при

Детали машин
Проверка изгибной прочности зубьев
Представим в выражении для σF окружную
Детали машин
Проверка изгибной прочности зубьев
Представим в выражении для σF окружную

Детали машин
Расчет на прочность при действии пиковой нагрузки
Критерий контактной
Детали машин
Расчет на прочность при действии пиковой нагрузки
Критерий контактной

Детали машин
Лекция 6.
Расчет косозубых и шевронных передач
Особенности геометрии косозубых и
Детали машин
Лекция 6.
Расчет косозубых и шевронных передач
Особенности геометрии косозубых и

Детали машин
Особенности геометрии косозубых и шевронных передач
В косозубых колесах зубья
Детали машин
Особенности геометрии косозубых и шевронных передач
В косозубых колесах зубья

Детали машин
Особенности геометрии косозубых и шевронных передач
Однако у косозубых передач
Детали машин
Особенности геометрии косозубых и шевронных передач
Однако у косозубых передач

Детали машин
Окружной и нормальный модули в косозубой передаче
В косозубых
Детали машин
Окружной и нормальный модули в косозубой передаче
В косозубых

Детали машин
Расчет на прочность косозубой передачи
Прочность зуба колеса
Детали машин
Расчет на прочность косозубой передачи
Прочность зуба колеса

Детали машин
Параметры эквивалентного колеса
Исходное косозубое колесо имеет делительный
Детали машин
Параметры эквивалентного колеса
Исходное косозубое колесо имеет делительный

Детали машин
Расчет на выносливость по контактным напряжениям
Основой для расчета
Детали машин
Расчет на выносливость по контактным напряжениям
Основой для расчета

Детали машин
Расчет на выносливость по контактным напряжениям
Полная нагрузка на
Детали машин
Расчет на выносливость по контактным напряжениям
Полная нагрузка на

Детали машин
Расчет на выносливость по контактным напряжениям
После подстановки значений
Детали машин
Расчет на выносливость по контактным напряжениям
После подстановки значений

Детали машин
Расчет на выносливость по напряжениям изгиба
Специфику нагружения косого
Детали машин
Расчет на выносливость по напряжениям изгиба
Специфику нагружения косого

Детали машин
Силы в цилиндрических зубчатых передачах
Принимают, что контакт зубьев
Детали машин
Силы в цилиндрических зубчатых передачах
Принимают, что контакт зубьев

Детали машин
Силы в цилиндрических зубчатых передачах
Окружная сила равна Ft
Детали машин
Силы в цилиндрических зубчатых передачах
Окружная сила равна Ft

Детали машин
Осевая сила в косозубой передаче
Величина осевой силы равна
Детали машин
Осевая сила в косозубой передаче
Величина осевой силы равна

Детали машин
Лекция 7.
Конические зубчатые передачи
Геометрия и кинематика передачи
Классификация конических
Детали машин
Лекция 7.
Конические зубчатые передачи
Геометрия и кинематика передачи
Классификация конических

Детали машин
Геометрия и кинематика передачи
Конические зубчатые колеса применяют
Детали машин
Геометрия и кинематика передачи
Конические зубчатые колеса применяют

Детали машин
Геометрия и кинематика передачи
Конические передачи выполняют равносмещенными
Детали машин
Геометрия и кинематика передачи
Конические передачи выполняют равносмещенными

Детали машин
Геометрия и кинематика передачи
Размеры, относящиеся к среднему
Детали машин
Геометрия и кинематика передачи
Размеры, относящиеся к среднему

Детали машин
Геометрия и кинематика передачи
Внешние делительные диаметры колес
Детали машин
Геометрия и кинематика передачи
Внешние делительные диаметры колес

Детали машин
Геометрия и кинематика передачи
Внешнее конусное расстояние, по
Детали машин
Геометрия и кинематика передачи
Внешнее конусное расстояние, по

Детали машин
Классификация конических передач
Конические колеса представляют собой круговые
Детали машин
Классификация конических передач
Конические колеса представляют собой круговые

Детали машин
Классификация конических передач
Угол наклона кругового зуба переменный.
Детали машин
Классификация конических передач
Угол наклона кругового зуба переменный.

Детали машин
Формы зуба конического колеса
Осевая форма I – нормально
Детали машин
Формы зуба конического колеса
Осевая форма I – нормально

Детали машин
Основные параметры передачи и коэффициенты смещения
Для унификации
Детали машин
Основные параметры передачи и коэффициенты смещения
Для унификации

Детали машин
Эквивалентные зубчатые колеса
Эквивалентным называется та-кое прямозубое цилиндрическое ко-лесо,
Детали машин
Эквивалентные зубчатые колеса
Эквивалентным называется та-кое прямозубое цилиндрическое ко-лесо,

Детали машин
Параметры эквивалентных колес
.
Эквивалентные числа зубьев: zv1=dv1/m=z1/cos δ1; zv2=
Детали машин
Параметры эквивалентных колес
.
Эквивалентные числа зубьев: zv1=dv1/m=z1/cos δ1; zv2=

Детали машин
Расчет на прочность прямозубой конической передачи
.
Расчет конических
Детали машин
Расчет на прочность прямозубой конической передачи
.
Расчет конических

Детали машин
Расчет на прочность прямозубой конической передачи
.
В результате
Детали машин
Расчет на прочность прямозубой конической передачи
.
В результате

Детали машин
Проектный расчет конической передачи
.
Допускается перегрузка по контактным
Детали машин
Проектный расчет конической передачи
.
Допускается перегрузка по контактным

Детали машин
Расчет на выносливость по напряжениям изгиба
.
По аналогии с
Детали машин
Расчет на выносливость по напряжениям изгиба
.
По аналогии с

Детали машин
Особенности расчета передачи с круговым зубом
.
Коэффициенты θH
Детали машин
Особенности расчета передачи с круговым зубом
.
Коэффициенты θH

Детали машин
Силы в конических прямозубых передачах
.
Полная нагрузка в
Детали машин
Силы в конических прямозубых передачах
.
Полная нагрузка в

Детали машин
Силы в конических прямозубых передачах
.
Величину сил определяют
Детали машин
Силы в конических прямозубых передачах
.
Величину сил определяют

Детали машин
Силы в конических передачах с круговым зубом
.
Окружная сила
Детали машин
Силы в конических передачах с круговым зубом
.
Окружная сила

Детали машин
Лекция 8.
Червячные передачи
Общие положения
Классификация червячных передач
Основные параметры
Детали машин
Лекция 8.
Червячные передачи
Общие положения
Классификация червячных передач
Основные параметры

Детали машин
Червячные передачи
.
Червячные передачи при-меняют для передачи дви-жения между
Детали машин
Червячные передачи
.
Червячные передачи при-меняют для передачи дви-жения между

Детали машин
Достоинства и недостатки червячных передач
.
Достоинствами червячных передач являются:
Детали машин
Достоинства и недостатки червячных передач
.
Достоинствами червячных передач являются:

Детали машин
Классификация червячных передач
.
В зависимости от формы внешней
Детали машин
Классификация червячных передач
.
В зависимости от формы внешней

Детали машин
Классификация червячных передач
.
В зависимости от формы профиля
Детали машин
Классификация червячных передач
.
В зависимости от формы профиля

Детали машин
Классификация червячных передач
.
Если резец установить в положение
Детали машин
Классификация червячных передач
.
Если резец установить в положение

Детали машин
Классификация червячных передач
.
Конволютными называют червяки, имеющие прямолинейный
Детали машин
Классификация червячных передач
.
Конволютными называют червяки, имеющие прямолинейный

Детали машин
Основные параметры передачи с цилиндрическим червяком
.
Расстояние между
Детали машин
Основные параметры передачи с цилиндрическим червяком
.
Расстояние между

Детали машин
Основные параметры передачи с цилиндрическим червяком
.
Основными параметрами
Детали машин
Основные параметры передачи с цилиндрическим червяком
.
Основными параметрами

Детали машин
Смещение в червячных передачах
.
Число заходов червяка в
Детали машин
Смещение в червячных передачах
.
Число заходов червяка в

Детали машин
Параметры червяка
.
Угол профиля архимедова червяка в осевом сечении
Детали машин
Параметры червяка
.
Угол профиля архимедова червяка в осевом сечении

Детали машин
Параметры червячного колеса
.
Делительный диаметр d2 = mz2.
Диаметр вершин
Детали машин
Параметры червячного колеса
.
Делительный диаметр d2 = mz2.
Диаметр вершин

Детали машин
Материалы червяка и колеса
.
Червяки изготавливают из тех же
Детали машин
Материалы червяка и колеса
.
Червяки изготавливают из тех же

Детали машин
Материалы червячных колес
.
Группа II. Безоловянные бронзы и латуни.
Детали машин
Материалы червячных колес
.
Группа II. Безоловянные бронзы и латуни.

Детали машин
Расчет допускаемых напряжений
.
При определении допускаемых напряжений учитывают,
Детали машин
Расчет допускаемых напряжений
.
При определении допускаемых напряжений учитывают,

Детали машин
Допускаемые контактные напряжения
.
Допускаемые контактные напряжения вычисляют по эмпирическим
Детали машин
Допускаемые контактные напряжения
.
Допускаемые контактные напряжения вычисляют по эмпирическим

Детали машин
Допускаемые контактные напряжения
.
Коэффициент долговечности
где NHE – эквивалентное
Детали машин
Допускаемые контактные напряжения
.
Коэффициент долговечности
где NHE – эквивалентное

Детали машин
Определение коэффициента эквивалентности
.
Для типовых режимов нагружения коэффициенты
Детали машин
Определение коэффициента эквивалентности
.
Для типовых режимов нагружения коэффициенты

Детали машин
Допускаемые контактные напряжения
.
Для материалов II группы допускаемые контактные
Детали машин
Допускаемые контактные напряжения
.
Для материалов II группы допускаемые контактные

Детали машин
Допускаемые напряжения изгиба
.
Допускаемые напряжения изгиба определяют в зависимости
Детали машин
Допускаемые напряжения изгиба
.
Допускаемые напряжения изгиба определяют в зависимости

Детали машин
Коэффициент долговечности при изгибе
.
При определении KFL используют зависимость
Детали машин
Коэффициент долговечности при изгибе
.
При определении KFL используют зависимость

Детали машин
Расчет червячной передачи на прочность
.
Зубья червячных колес рассчитывают так
Детали машин
Расчет червячной передачи на прочность
.
Зубья червячных колес рассчитывают так

Детали машин
Расчет на прочность по контактным напряжениям
.
Основой для расчета
Детали машин
Расчет на прочность по контактным напряжениям
.
Основой для расчета

Детали машин
Расчет на прочность по контактным напряжениям
.
Поскольку в осевой
Детали машин
Расчет на прочность по контактным напряжениям
.
Поскольку в осевой

Детали машин
Расчет на прочность по контактным напряжениям
.
Длину дуги, ограниченной
Детали машин
Расчет на прочность по контактным напряжениям
.
Длину дуги, ограниченной

Детали машин
Расчет на прочность по контактным напряжениям
.
Выражение для lΣ,
Детали машин
Расчет на прочность по контактным напряжениям
.
Выражение для lΣ,

Детали машин
Расчет на прочность по контактным напряжениям
.
Выразим d2 и
Детали машин
Расчет на прочность по контактным напряжениям
.
Выразим d2 и

Детали машин
Расчет на прочность по контактным напряжениям
.
Коэффициент концентрации нагрузки
Детали машин
Расчет на прочность по контактным напряжениям
.
Коэффициент концентрации нагрузки

Детали машин
Проектный расчет червячной передачи
.
Формулу для проектного расчета получают,
Детали машин
Проектный расчет червячной передачи
.
Формулу для проектного расчета получают,

Детали машин
Расчет на изгибную прочность
.
Расчет выполняется только для
Детали машин
Расчет на изгибную прочность
.
Расчет выполняется только для

Детали машин
Расчет на изгибную прочность, КПД передачи
.
Окончательную формулу
Детали машин
Расчет на изгибную прочность, КПД передачи
.
Окончательную формулу

Детали машин
Силы в зацеплении
.
Полное усилие в зацеплении раскладывают
Детали машин
Силы в зацеплении
.
Полное усилие в зацеплении раскладывают

Детали машин
Тепловой расчет
.
Потери механической энергии в червячной передаче
Детали машин
Тепловой расчет
.
Потери механической энергии в червячной передаче

Детали машин
Тепловой расчет червячной передачи
.
где A – площадь поверхности редуктора,
Детали машин
Тепловой расчет червячной передачи
.
где A – площадь поверхности редуктора,

Детали машин
Коэффициент теплоотдачи
.
Коэффициент теплоотдачи зависит от способа охлаждения.
Детали машин
Коэффициент теплоотдачи
.
Коэффициент теплоотдачи зависит от способа охлаждения.

Детали машин
Тепловой расчет червячной передачи
.
Основными способами искусственного охлаждения являются
Детали машин
Тепловой расчет червячной передачи
.
Основными способами искусственного охлаждения являются

Детали машин
Лекция 9.
Ременные передачи
Общие положения
Классификация ременных передач
Кинематика и
Детали машин
Лекция 9.
Ременные передачи
Общие положения
Классификация ременных передач
Кинематика и

Детали машин
Ременные передачи
.
Простейшая ременная переда-ча состоит из ведущего и
Детали машин
Ременные передачи
.
Простейшая ременная переда-ча состоит из ведущего и

Детали машин
Недостатки ременных передач
.
Сравнительно большие габариты передачи (при одинаковых режимах
Детали машин
Недостатки ременных передач
.
Сравнительно большие габариты передачи (при одинаковых режимах

Детали машин
Типы ремней
.
В зависимости от формы поперечного сечения ремня разли-чают следующие
Детали машин
Типы ремней
.
В зависимости от формы поперечного сечения ремня разли-чают следующие

Детали машин
Классификация передач
.
а б в г
Типам ремней соответствуют передачи: плоскоремен-ные
Детали машин
Классификация передач
.
а б в г
Типам ремней соответствуют передачи: плоскоремен-ные

Детали машин
Плоскоременные передачи
.
Открытая передача (рис. а) является наиболее распространенной,
Детали машин
Плоскоременные передачи
.
Открытая передача (рис. а) является наиболее распространенной,

Детали машин
Классификация передач
.
В полуперекрестной передаче (рис. в) оси валов
Детали машин
Классификация передач
.
В полуперекрестной передаче (рис. в) оси валов

Детали машин
Кинематика и геометрия ременных передач
.
При проектировании ременных передач
Детали машин
Кинематика и геометрия ременных передач
.
При проектировании ременных передач

Детали машин
Явление упругого скольжения
.
Обозначим усилия натяжения в ведущей ветви
Детали машин
Явление упругого скольжения
.
Обозначим усилия натяжения в ведущей ветви

Детали машин
Явление упругого скольжения
.
Для оценки упругого скольжения вводится понятие
Детали машин
Явление упругого скольжения
.
Для оценки упругого скольжения вводится понятие

Детали машин
Параметры ременной передачи
.
Межосевое расстояние передачи предварительно находят по
следующим
Детали машин
Параметры ременной передачи
.
Межосевое расстояние передачи предварительно находят по
следующим

Детали машин
Силовой расчет ременной передачи
.
До начала работы ременной передачи
Детали машин
Силовой расчет ременной передачи
.
До начала работы ременной передачи

Детали машин
Вывод формулы Эйлера
.
При выводе формулы Эйлера используется расчетная
Детали машин
Вывод формулы Эйлера
.
При выводе формулы Эйлера используется расчетная

Детали машин
Вывод формулы Эйлера
.
Условие равновесия элемента ремня в направлении оси
Детали машин
Вывод формулы Эйлера
.
Условие равновесия элемента ремня в направлении оси

Детали машин
Формула Эйлера, усилия в ветвях ремня
.
После потенцирования получим формулу
Детали машин
Формула Эйлера, усилия в ветвях ремня
.
После потенцирования получим формулу

Детали машин
Напряжения в ремне
.
Усилия в ремне зависят от площади
Детали машин
Напряжения в ремне
.
Усилия в ремне зависят от площади

Детали машин
Напряжения в ремне
от действия центробежных сил
.
При движении
Детали машин
Напряжения в ремне
от действия центробежных сил
.
При движении

Детали машин
Напряжения в ремне
от действия центробежных сил
.
Сила dF
Детали машин
Напряжения в ремне
от действия центробежных сил
.
Сила dF

Детали машин
Напряжение изгиба ремня
.
В части ремня, огибающей шкив, возникают
Детали машин
Напряжение изгиба ремня
.
В части ремня, огибающей шкив, возникают

Детали машин
Напряжение изгиба и эпюра напряжений в ремне
После преобразований
Детали машин
Напряжение изгиба и эпюра напряжений в ремне
После преобразований

Детали машин
Нагрузки на валы и опоры
Силы натяжения в ведущей
Детали машин
Нагрузки на валы и опоры
Силы натяжения в ведущей

Детали машин
Лекция 10.
Расчет ремней
Расчет плоских ремней по тяговой способности
Расчет плоских
Детали машин
Лекция 10.
Расчет ремней
Расчет плоских ремней по тяговой способности
Расчет плоских

Детали машин
Расчет ремней (общие положения)
Работоспособность ремней определяется двумя основными
Детали машин
Расчет ремней (общие положения)
Работоспособность ремней определяется двумя основными

Детали машин
Расчет плоских ремней по тяговой способности
Тяговая способность ремня оценивается
Детали машин
Расчет плоских ремней по тяговой способности
Тяговая способность ремня оценивается

Детали машин
Кривые скольжения
Кривые скольжения получают на испытательных стендах для типовых
Детали машин
Кривые скольжения
Кривые скольжения получают на испытательных стендах для типовых

Детали машин
Допускаемые напряжения в ремне
При φ = φmax наблюдается полное
Детали машин
Допускаемые напряжения в ремне
При φ = φmax наблюдается полное

Детали машин
Корректирующие коэффициенты
где Cα – коэффициент, учитывающий влияние угла обхвата ведущего
Детали машин
Корректирующие коэффициенты
где Cα – коэффициент, учитывающий влияние угла обхвата ведущего

Детали машин
Приведенное полезное напряжение
Величина приведенного полезного напряжения зависит от
Детали машин
Приведенное полезное напряжение
Величина приведенного полезного напряжения зависит от

Детали машин
Расчет плоских ремней на долговечность
Расчет ремня на долговечность
Детали машин
Расчет плоских ремней на долговечность
Расчет ремня на долговечность

Детали машин
Расчет плоских ремней на долговечность
Сu – коэффициент, учитывающий влияние
Детали машин
Расчет плоских ремней на долговечность
Сu – коэффициент, учитывающий влияние

Детали машин
Расчет плоских ремней на долговечность
Окончательное выражение для определения
Детали машин
Расчет плоских ремней на долговечность
Окончательное выражение для определения

Детали машин
Приведенный коэффициент трения клинового ремня
Клиновые ремни и ребра
Детали машин
Приведенный коэффициент трения клинового ремня
Клиновые ремни и ребра

Детали машин
Клиновые ремни
Выпускают клиновые ремни нормально-го и узкого сечений. Стандартом
Детали машин
Клиновые ремни
Выпускают клиновые ремни нормально-го и узкого сечений. Стандартом

Детали машин
Расчет клиновых ремней
Тип сечения клинового ремня и его геометрические
Детали машин
Расчет клиновых ремней
Тип сечения клинового ремня и его геометрические

Детали машин
Расчет клиновых ремней
Расчетное число ремней предварительно определяют по формуле
Детали машин
Расчет клиновых ремней
Расчетное число ремней предварительно определяют по формуле

Детали машин
Расчет поликлиновых ремней
Параметры поликлиновых ремней приведены в табл., в
Детали машин
Расчет поликлиновых ремней
Параметры поликлиновых ремней приведены в табл., в

Детали машин
Расчет поликлиновых ремней
CL– коэффициент, учитывающий длину ремня;
Cd – коэффициент, учитывающий
Детали машин
Расчет поликлиновых ремней
CL– коэффициент, учитывающий длину ремня;
Cd – коэффициент, учитывающий

Детали машин
Лекция 11.
Цепные передачи
Общие положения
Цепи и звездочки
Геометрические и
Детали машин
Лекция 11.
Цепные передачи
Общие положения
Цепи и звездочки
Геометрические и

Детали машин
Цепные передачи
Цепная передача относится к передачам зацеплением с гибкой
Детали машин
Цепные передачи
Цепная передача относится к передачам зацеплением с гибкой

Детали машин
Цепные передачи
К недостаткам цепной передачи относятся.
1. Вытягивание цепи вследствие износа
Детали машин
Цепные передачи
К недостаткам цепной передачи относятся.
1. Вытягивание цепи вследствие износа

Детали машин
Приводные цепи
Наибольшее применение находят приводные роликовые цепи (см.
Детали машин
Приводные цепи
Наибольшее применение находят приводные роликовые цепи (см.

Детали машин
Приводные цепи
Отличие втулочных цепей от роликовых заключается в
Детали машин
Приводные цепи
Отличие втулочных цепей от роликовых заключается в

Детали машин
Зубчатые цепи
Зубчатые цепи состоят из набора пластин. Каждая
Детали машин
Зубчатые цепи
Зубчатые цепи состоят из набора пластин. Каждая

Детали машин
Звездочки
Профилирование звездочек роликовых цепей выполняют по ГОСТ 591-69.
Детали машин
Звездочки
Профилирование звездочек роликовых цепей выполняют по ГОСТ 591-69.

Детали машин
Звездочки
Рабочая часть профиля зуба состоит из двух радиальных
Детали машин
Звездочки
Рабочая часть профиля зуба состоит из двух радиальных

Детали машин
Геометрические и кинематические параметры цепных передач
Основным параметром цепной передачи
Детали машин
Геометрические и кинематические параметры цепных передач
Основным параметром цепной передачи

Детали машин
Геометрические и кинематические параметры цепных передач
Рекомендуемый диапазон для выбора
Детали машин
Геометрические и кинематические параметры цепных передач
Рекомендуемый диапазон для выбора

Детали машин
Критерии работоспособности и
расчета передач роликовой цепью
Основные причины выхода
Детали машин
Критерии работоспособности и
расчета передач роликовой цепью
Основные причины выхода

Детали машин
Критерии работоспособности и расчета передач роликовой цепью
где Kэ – коэффициент
Детали машин
Критерии работоспособности и расчета передач роликовой цепью
где Kэ – коэффициент

Детали машин
Критерии работоспособности и
расчета передач роликовой цепью
Kр – коэффициент, учитывающий
Детали машин
Критерии работоспособности и
расчета передач роликовой цепью
Kр – коэффициент, учитывающий

Детали машин
Определение шага роликовой цепи
Выразим окружное усилие через крутящий момент
Детали машин
Определение шага роликовой цепи
Выразим окружное усилие через крутящий момент

Детали машин
Проверочный расчет передачи
Для выбранного шага проверяют выполнение условия
n1 ≤
Детали машин
Проверочный расчет передачи
Для выбранного шага проверяют выполнение условия
n1 ≤

Детали машин
Проверочный расчет передачи
Условие статической прочности цепи
Сила, нагружающая валы передачи,
Fb =
Детали машин
Проверочный расчет передачи
Условие статической прочности цепи
Сила, нагружающая валы передачи,
Fb =

Детали машин
Расчет передачи зубчатой цепью
Расчетная ширина цепи
где P1 –
Детали машин
Расчет передачи зубчатой цепью
Расчетная ширина цепи
где P1 –

Детали машин
Лекция 12.
Валы и оси
Общие положения
Проектный расчет и
Детали машин
Лекция 12.
Валы и оси
Общие положения
Проектный расчет и

Детали машин
Валы и оси
Валы и оси служат для установки
Детали машин
Валы и оси
Валы и оси служат для установки

Детали машин
Проектный расчет и конструирование вала
Большинство валов изготавливают из
Детали машин
Проектный расчет и конструирование вала
Большинство валов изготавливают из

Детали машин
Проектный расчет и конструирование вала
где Т – крутящий момент
Детали машин
Проектный расчет и конструирование вала
где Т – крутящий момент

Детали машин
Составление расчетной схемы вала
По эскизной компоновке составляют расчетную схему
Детали машин
Составление расчетной схемы вала
По эскизной компоновке составляют расчетную схему

Детали машин
Определение консольной нагрузки
Для редукторов консольную нагрузку предварительно определяют
Детали машин
Определение консольной нагрузки
Для редукторов консольную нагрузку предварительно определяют

Детали машин
Выбор опасного сечения вала
После приложения всех сил в соответствующих
Детали машин
Выбор опасного сечения вала
После приложения всех сил в соответствующих

Детали машин
Расчет вала на усталостную прочность
Экспериментально установлено, что наиболее
Детали машин
Расчет вала на усталостную прочность
Экспериментально установлено, что наиболее

Детали машин
Циклы напряжений
Основными параметрами цикла напряжений являются амплитуда σa
Детали машин
Циклы напряжений
Основными параметрами цикла напряжений являются амплитуда σa

Детали машин
Амплитудные и средние значения цикла напряжений
Постоянные по величине
Детали машин
Амплитудные и средние значения цикла напряжений
Постоянные по величине

Детали машин
Амплитудные и средние значения
цикла напряжений, предел выносливости
Для
Детали машин
Амплитудные и средние значения
цикла напряжений, предел выносливости
Для

Детали машин
Предел выносливости
Для симметричного цикла напряжений R= –1 и
Детали машин
Предел выносливости
Для симметричного цикла напряжений R= –1 и

Детали машин
Переход от пределов выносливости образца к пределам выносливости детали
Для
Детали машин
Переход от пределов выносливости образца к пределам выносливости детали
Для

Детали машин
Переход от пределов выносливости образца к пределам выносливости детали
εσ и
Детали машин
Переход от пределов выносливости образца к пределам выносливости детали
εσ и

Детали машин
Переход от пределов выносливости образца к пределам выносливости детали
Значения
Детали машин
Переход от пределов выносливости образца к пределам выносливости детали
Значения

Детали машин
Учет шероховатости поверхности
При кручении и изгибе вала наибольшие
Детали машин
Учет шероховатости поверхности
При кручении и изгибе вала наибольшие

Детали машин
Коэффициенты запаса прочности
Для определения коэффициентов запаса прочности по нор-мальным
Детали машин
Коэффициенты запаса прочности
Для определения коэффициентов запаса прочности по нор-мальным

Детали машин
Расчет вала на статическую прочность
Расчет выполняют по наибольшей возможной
Детали машин
Расчет вала на статическую прочность
Расчет выполняют по наибольшей возможной

Детали машин
Расчет вала на жесткость
Упругие перемещения вала отрицательно влияют
Детали машин
Расчет вала на жесткость
Упругие перемещения вала отрицательно влияют

Детали машин
Изгибная жесткость вала
Деформацию вала при изгибе численно оценивают прогибом
Детали машин
Изгибная жесткость вала
Деформацию вала при изгибе численно оценивают прогибом

Детали машин
Крутильная жесткость вала
Крутильную жесткость вала, состоящего из n участков,
Детали машин
Крутильная жесткость вала
Крутильную жесткость вала, состоящего из n участков,

Детали машин
Расчет вала на колебания
Колебания валов связаны с периодическими
Детали машин
Расчет вала на колебания
Колебания валов связаны с периодическими

Детали машин
Расчет вала на колебания
На вал действует центробежная сила,
Детали машин
Расчет вала на колебания
На вал действует центробежная сила,

Детали машин
Расчет вала на колебания
Как следует из полученного выражения,
Детали машин
Расчет вала на колебания
Как следует из полученного выражения,

Детали машин
Лекция 13.
Подшипники качения
Общие положения
Классификация и условные обозначения
Характеристики
Детали машин
Лекция 13.
Подшипники качения
Общие положения
Классификация и условные обозначения
Характеристики

Детали машин
Подшипники качения
Подшипники качения являются основным видом опор для
Детали машин
Подшипники качения
Подшипники качения являются основным видом опор для

Детали машин
Материалы деталей подшипников
Детали подшипников воспринимают значительные контактные нагрузки. Кольца
Детали машин
Материалы деталей подшипников
Детали подшипников воспринимают значительные контактные нагрузки. Кольца

Детали машин
Классификация и условные обозначения
Подшипники качения классифицируют по следующим признакам:
1)
Детали машин
Классификация и условные обозначения
Подшипники качения классифицируют по следующим признакам:
1)

Детали машин
Классификация и условные обозначения
2) по направлению воспринимаемой нагрузки различают подшип-ники:
радиальные,
Детали машин
Классификация и условные обозначения
2) по направлению воспринимаемой нагрузки различают подшип-ники:
радиальные,

Детали машин
Условные обозначения подшипников
Нули, стоящие левее последней значащей цифры, не
Детали машин
Условные обозначения подшипников
Нули, стоящие левее последней значащей цифры, не

Детали машин
Условные обозначения подшипников
Четвертая цифра справа обозначает тип подшипника:
Шариковый радиальный однорядный……….....................0
Шариковый
Детали машин
Условные обозначения подшипников
Четвертая цифра справа обозначает тип подшипника:
Шариковый радиальный однорядный……….....................0
Шариковый

Детали машин
Условные обозначения подшипников
Кроме основного обозначения подшипник может содержать дополнительные
Детали машин
Условные обозначения подшипников
Кроме основного обозначения подшипник может содержать дополнительные

Детали машин
Характеристики подшипников основных типов
Шариковый радиальный однорядный подшипник (рис. а)
Детали машин
Характеристики подшипников основных типов
Шариковый радиальный однорядный подшипник (рис. а)

Детали машин
Характеристики подшипников основных типов
Роликовый радиальный подшипник с короткими цилиндрическими
Детали машин
Характеристики подшипников основных типов
Роликовый радиальный подшипник с короткими цилиндрическими

Детали машин
Распределение нагрузки между телами качения
Радиальная нагрузка Fr, дейст-вующая
Детали машин
Распределение нагрузки между телами качения
Радиальная нагрузка Fr, дейст-вующая

Детали машин
Определение наибольшей нагрузки на тело качения
Для шарикоподшипников сближение
Детали машин
Определение наибольшей нагрузки на тело качения
Для шарикоподшипников сближение

Детали машин
Характер нагружения деталей подшипников
Даже при постоянной радиальной нагрузке
Детали машин
Характер нагружения деталей подшипников
Даже при постоянной радиальной нагрузке

Детали машин
Виды разрушения подшипников
Основной причиной разрушения подшипников качения при хорошей
Детали машин
Виды разрушения подшипников
Основной причиной разрушения подшипников качения при хорошей

Детали машин
Критерии расчета подшипников
Основными видами расчета подшипников качения являются расчет
Детали машин
Критерии расчета подшипников
Основными видами расчета подшипников качения являются расчет

Детали машин
Статическая грузоподьемность
Базовая статическая грузоподъемность C0 – это такая постоянная
Детали машин
Статическая грузоподьемность
Базовая статическая грузоподъемность C0 – это такая постоянная

Детали машин
Расчет на долговечность по динамической грузоподъемности
Расчет по динамической грузоподъемности
Детали машин
Расчет на долговечность по динамической грузоподъемности
Расчет по динамической грузоподъемности

Детали машин
Эквивалентная динамическая нагрузка и расчетный ресурс
Для учета реальных условий
Детали машин
Эквивалентная динамическая нагрузка и расчетный ресурс
Для учета реальных условий

Детали машин
Эквивалентная динамическая нагрузка и расчетный ресурс
Базовый расчетный ресурс соответствует
Детали машин
Эквивалентная динамическая нагрузка и расчетный ресурс
Базовый расчетный ресурс соответствует

Детали машин
Эквивалентная динамическая нагрузка
X – коэффициент радиальной нагрузки;
Y – коэффициент
Детали машин
Эквивалентная динамическая нагрузка
X – коэффициент радиальной нагрузки;
Y – коэффициент

Детали машин
Коэффициенты радиальной и осевой нагрузок
Коэффициенты X и Y
Детали машин
Коэффициенты радиальной и осевой нагрузок
Коэффициенты X и Y

Детали машин
Требуемый ресурс подшипника
Если Fa / (VFr)≤ e, то
Детали машин
Требуемый ресурс подшипника
Если Fa / (VFr)≤ e, то

Детали машин
Особенности расчета радиально-упорных подшипников
При составлении расчетной схемы вала
Детали машин
Особенности расчета радиально-упорных подшипников
При составлении расчетной схемы вала

Детали машин
Особенности расчета радиально-упорных подшипников
Расстояние между центром опоры и
Детали машин
Особенности расчета радиально-упорных подшипников
Расстояние между центром опоры и

Детали машин
Особенности расчета радиально-упорных подшипников
При нагружении радиально-упорного подшипника ради-альной
Детали машин
Особенности расчета радиально-упорных подшипников
При нагружении радиально-упорного подшипника ради-альной

Детали машин
Особенности расчета радиально-упорных подшипников
Осевую составляющую Si необходимо учитывать
Детали машин
Особенности расчета радиально-упорных подшипников
Осевую составляющую Si необходимо учитывать

Детали машин
Эквивалентная нагрузка при переменных режимах работы
Подшипники, работающие при переменных
Детали машин
Эквивалентная нагрузка при переменных режимах работы
Подшипники, работающие при переменных

Детали машин
Расчет подшипников по статической грузоподъемности
Расчет по статической грузоподъемности выполняют
Детали машин
Расчет подшипников по статической грузоподъемности
Расчет по статической грузоподъемности выполняют

Детали машин
Лекция 14.
Шпоночные и шлицевые соединения
Назначение и конструкции шпоночных
Детали машин
Лекция 14.
Шпоночные и шлицевые соединения
Назначение и конструкции шпоночных

Детали машин
Назначение и конструкции шпоночных соединений
Шпонки служат для передачи крутящего
Детали машин
Назначение и конструкции шпоночных соединений
Шпонки служат для передачи крутящего

Детали машин
Призматические шпонки
Призматические шпонки являются наиболее распрос-траненным типом шпонок. Они
Детали машин
Призматические шпонки
Призматические шпонки являются наиболее распрос-траненным типом шпонок. Они

Детали машин
Призматические шпонки
Обыкновенные шпонки предназначены для неподвижных соединений. Различают обыкновенные
Детали машин
Призматические шпонки
Обыкновенные шпонки предназначены для неподвижных соединений. Различают обыкновенные

Детали машин
Призматические шпонки
Для наиболее массовой шпонки по ГОСТ 23360-78 предусмотрено
Детали машин
Призматические шпонки
Для наиболее массовой шпонки по ГОСТ 23360-78 предусмотрено

Детали машин
Призматические шпонки
Направляющие шпонки по ГОСТ 8790-79 (рис. а) применяют
Детали машин
Призматические шпонки
Направляющие шпонки по ГОСТ 8790-79 (рис. а) применяют

Детали машин
Сегментные шпонки
Сегментные шпонки по ГОСТ 24071-80 являются наиболее технологичными
Детали машин
Сегментные шпонки
Сегментные шпонки по ГОСТ 24071-80 являются наиболее технологичными

Детали машин
Клиновые шпонки
Клиновые шпонки имеют уклон 1:100 по грани, взаимодействующей
Детали машин
Клиновые шпонки
Клиновые шпонки имеют уклон 1:100 по грани, взаимодействующей

Детали машин
Клиновые шпонки
Такой способ формирования соединения приводит к наиболее существенному
Детали машин
Клиновые шпонки
Такой способ формирования соединения приводит к наиболее существенному

Детали машин
Расчет призматических шпонок
При передаче крутящего момента шпонка работает на
Детали машин
Расчет призматических шпонок
При передаче крутящего момента шпонка работает на

Детали машин
Расчет призматических шпонок
Шпонка передает окружную силу Ft:
Ft = 2000T/d,
где
Детали машин
Расчет призматических шпонок
Шпонка передает окружную силу Ft:
Ft = 2000T/d,
где

Детали машин
Расчет призматических шпонок
В случае неподвижных соединений для стальных ступиц
Детали машин
Расчет призматических шпонок
В случае неподвижных соединений для стальных ступиц

Детали машин
Шлицевые соединения
Шлицевые соединения образуются при наличии наружных зубьев
Детали машин
Шлицевые соединения
Шлицевые соединения образуются при наличии наружных зубьев

Детали машин
Ппрямобочные соединения
Стандартизованы два типа шлицевых соединений: прямобочные по
Детали машин
Ппрямобочные соединения
Стандартизованы два типа шлицевых соединений: прямобочные по

Детали машин
Способы центрирования прямобочных соединений
Для прямобочных соединений используют три способа
Детали машин
Способы центрирования прямобочных соединений
Для прямобочных соединений используют три способа

Детали машин
Соединения с эвольвентным
профилем зубьев
Считаются наиболее перс-пективными при больших
Детали машин
Соединения с эвольвентным
профилем зубьев
Считаются наиболее перс-пективными при больших

Детали машин
Расчет шлицевых соединений
Основными критериями работоспособности шлицевых соединений являются сопротивление
Детали машин
Расчет шлицевых соединений
Основными критериями работоспособности шлицевых соединений являются сопротивление

Детали машин
Расчет шлицевых соединений
dср – средний диаметр соединения; h – рабочая
Детали машин
Расчет шлицевых соединений
dср – средний диаметр соединения; h – рабочая

Детали машин
Лекция 15.
Соединения с натягом
Основные понятия
Способы получения соединений
Расчет соединений
Детали машин
Лекция 15.
Соединения с натягом
Основные понятия
Способы получения соединений
Расчет соединений

Детали машин
Соединения с натягом, основные понятия
Соединения деталей с натягом находят
Детали машин
Соединения с натягом, основные понятия
Соединения деталей с натягом находят

Детали машин
Соединения с натягом, основные понятия
Соединения способны передавать осевые усилия, крутящие
Детали машин
Соединения с натягом, основные понятия
Соединения способны передавать осевые усилия, крутящие

Детали машин
Соединения с натягом, основные понятия
Диаметральный натяг N = 2δ
Детали машин
Соединения с натягом, основные понятия
Диаметральный натяг N = 2δ

Детали машин
Способы получения соединений
здесь E1, E2, μ1 и μ2 – соответственно
Детали машин
Способы получения соединений
здесь E1, E2, μ1 и μ2 – соответственно

Детали машин
Тепловая сборка
При тепловой сборке предварительно производят нагрев охватывающей детали,
Детали машин
Тепловая сборка
При тепловой сборке предварительно производят нагрев охватывающей детали,

Детали машин
Расчет соединений с натягом
В случае нагружения соединения осевой
Детали машин
Расчет соединений с натягом
В случае нагружения соединения осевой

Детали машин
Расчет соединений с натягом
По закону Кулона сила трения
Детали машин
Расчет соединений с натягом
По закону Кулона сила трения

Детали машин
Расчет соединений при передаче M
Для уравновешивания момента давление
Детали машин
Расчет соединений при передаче M
Для уравновешивания момента давление

Детали машин
Расчет давления из условия нераскрытия стыка
Величина R пропорциональна
Детали машин
Расчет давления из условия нераскрытия стыка
Величина R пропорциональна

Детали машин
Поправки на способ сборки и температурные деформации
При сборке
Детали машин
Поправки на способ сборки и температурные деформации
При сборке

Детали машин
Минимальный требуемый натяг
Минимальный требуемый натяг, необходимый для переда-чи
Детали машин
Минимальный требуемый натяг
Минимальный требуемый натяг, необходимый для переда-чи

Детали машин
Наибольшие эквивалентные напряжения
Эпюры напряжений в поперечном сечении деталей соединения
Детали машин
Наибольшие эквивалентные напряжения
Эпюры напряжений в поперечном сечении деталей соединения

Детали машин
Максимальный допустимый натяг
Следовательно, максимальное допустимое по условию проч-ности вала
Детали машин
Максимальный допустимый натяг
Следовательно, максимальное допустимое по условию проч-ности вала
![Детали машин Выбор стандартной посадки Значения [N]min и [N]max являются](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/284914/slide-292.jpg)
Детали машин
Выбор стандартной посадки
Значения [N]min и [N]max являются ограничениями
Детали машин
Выбор стандартной посадки
Значения [N]min и [N]max являются ограничениями

Детали машин
Концентрация напряжений в соединениях с натягом
Экспериментально установлено, что
Детали машин
Концентрация напряжений в соединениях с натягом
Экспериментально установлено, что

Детали машин
Лекция 16.
Резьбовые соединения
Общие положения
Геометрические параметры резьбы
Классы прочности и
Детали машин
Лекция 16.
Резьбовые соединения
Общие положения
Геометрические параметры резьбы
Классы прочности и

Детали машин
Общие положения
Резьбовые соединения являются наиболее распростра-ненными разъемными
Детали машин
Общие положения
Резьбовые соединения являются наиболее распростра-ненными разъемными

Детали машин
Классификация резьб по назначению
В зависимости от назначения резьбы
Детали машин
Классификация резьб по назначению
В зависимости от назначения резьбы

Детали машин
Геометрические параметры резьбы
Основными геометричес-кими параметрами цилин-дрической резьбы являются
Детали машин
Геометрические параметры резьбы
Основными геометричес-кими параметрами цилин-дрической резьбы являются

Детали машин
Метрические резьбы
Основной крепежной резьбой является метрическая резьба. Профиль резьбы
Детали машин
Метрические резьбы
Основной крепежной резьбой является метрическая резьба. Профиль резьбы

Детали машин
Виды резьбовых соединений
Основными видами резьбовых соединений являются винты с
Детали машин
Виды резьбовых соединений
Основными видами резьбовых соединений являются винты с

Детали машин
Виды резьбовых соединений
Винтовые соединения применяют при достаточной толщине детали для
Детали машин
Виды резьбовых соединений
Винтовые соединения применяют при достаточной толщине детали для

Детали машин
Классы прочности
При изготовлении стальных винтов, болтов и шпилек предусмотрено
Детали машин
Классы прочности
При изготовлении стальных винтов, болтов и шпилек предусмотрено

Детали машин
Силовые соотношения в винтовой паре
Для вывода основных соотношений рассмотрим
Детали машин
Силовые соотношения в винтовой паре
Для вывода основных соотношений рассмотрим

Детали машин
Силовые соотношения в винтовой паре
Сила трения Fтр по закону
Детали машин
Силовые соотношения в винтовой паре
Сила трения Fтр по закону

Детали машин
Условия самоторможения резьбы
Для метрической резьбы приведенный угол трения
Детали машин
Условия самоторможения резьбы
Для метрической резьбы приведенный угол трения

Детали машин
Способы стопорения
Известные способы стопорения базируются на одном из
Детали машин
Способы стопорения
Известные способы стопорения базируются на одном из

Детали машин
Способы стопорения
2. Жесткое соединение гайки с винтом, например, с
Детали машин
Способы стопорения
2. Жесткое соединение гайки с винтом, например, с

Детали машин
Распределение осевой нагрузки
между витками резьбы
Осевая нагрузка с винта
Детали машин
Распределение осевой нагрузки
между витками резьбы
Осевая нагрузка с винта

Детали машин
Распределение осевой нагрузки между витками резьбы
Нижний виток воспринимает
Детали машин
Распределение осевой нагрузки между витками резьбы
Нижний виток воспринимает

Детали машин
Лекция 17.
Резьбовые соединения
Расчет незатянутого болтового соединения, нагруженного внешней
Детали машин
Лекция 17.
Резьбовые соединения
Расчет незатянутого болтового соединения, нагруженного внешней

Детали машин
Расчеты на прочность
Основными видами разрушения резьбовых изделий
Детали машин
Расчеты на прочность
Основными видами разрушения резьбовых изделий

Детали машин
Расчет незатянутого болтового соединения, нагруженного внешней осевой силой
Принимают,
Детали машин
Расчет незатянутого болтового соединения, нагруженного внешней осевой силой
Принимают,

Детали машин
Расчет затянутого болтового соединения, не нагруженного внешней осевой силой
Детали машин
Расчет затянутого болтового соединения, не нагруженного внешней осевой силой

Детали машин
Расчет затянутого болтового соединения, не нагруженного внешней осевой силой
Детали машин
Расчет затянутого болтового соединения, не нагруженного внешней осевой силой

Детали машин
Расчет затянутого болтового соединения, нагруженного внешней осевой силой
Предварительная
Детали машин
Расчет затянутого болтового соединения, нагруженного внешней осевой силой
Предварительная

Детали машин
Расчет затянутого болтового соединения, нагруженного внешней осевой силой
Усилия,
Детали машин
Расчет затянутого болтового соединения, нагруженного внешней осевой силой
Усилия,

Детали машин
Расчет затянутого болтового соединения, нагруженного внешней осевой силой
Для
Детали машин
Расчет затянутого болтового соединения, нагруженного внешней осевой силой
Для

Детали машин
Расчет болтового соединения, нагруженного силами, сдвигающими детали в стыке
Детали машин
Расчет болтового соединения, нагруженного силами, сдвигающими детали в стыке

Детали машин
Расчет болтового соединения, нагруженного силами, сдвигающими детали в стыке
Детали машин
Расчет болтового соединения, нагруженного силами, сдвигающими детали в стыке

Детали машин
Расчет болтового соединения, нагруженного силами, сдвигающими детали в стыке
Детали машин
Расчет болтового соединения, нагруженного силами, сдвигающими детали в стыке

Детали машин
Расчет болтов при эксцентричном приложении нагрузки
Эксцентричная нагрузка возникает
Детали машин
Расчет болтов при эксцентричном приложении нагрузки
Эксцентричная нагрузка возникает

Детали машин
Расчет болтов при эксцентричном приложении нагрузки
Наибольшее суммарное напряжение
Детали машин
Расчет болтов при эксцентричном приложении нагрузки
Наибольшее суммарное напряжение

Детали машин
Расчет болтов при эксцентричном приложении нагрузки
При перекосе опорных
Детали машин
Расчет болтов при эксцентричном приложении нагрузки
При перекосе опорных

Детали машин
Расчет группы болтов
Расчет сводится к определению расчетной
Детали машин
Расчет группы болтов
Расчет сводится к определению расчетной

Детали машин
Расчет группы болтов
Случай 2. Равнодействующая нагрузка лежит в
Детали машин
Расчет группы болтов
Случай 2. Равнодействующая нагрузка лежит в

Детали машин
Расчет группы болтов
FT1/r1= FT2/r2=…= FTn/rn = q,
где q
Детали машин
Расчет группы болтов
FT1/r1= FT2/r2=…= FTn/rn = q,
где q

Детали машин
Расчет группы болтов
Случай 3. Нагрузка соединения раскрывает стык
Детали машин
Расчет группы болтов
Случай 3. Нагрузка соединения раскрывает стык

Детали машин
Расчет группы болтов
Сила R1 и момент M
Детали машин
Расчет группы болтов
Сила R1 и момент M

Детали машин
Расчет группы болтов
Экспериментально установлено, что напряжения в
Детали машин
Расчет группы болтов
Экспериментально установлено, что напряжения в

Детали машин
Расчет группы болтов
Расчет по условию отсутствия смещения деталей
Детали машин
Расчет группы болтов
Расчет по условию отсутствия смещения деталей

Детали машин
Расчет группы болтов
где FR = R1/z − внешняя
Детали машин
Расчет группы болтов
где FR = R1/z − внешняя

Детали машин
Клеммовые соединения
Клеммовые соединения применяют для закреп-ления деталей
Детали машин
Клеммовые соединения
Клеммовые соединения применяют для закреп-ления деталей

Детали машин
Клеммовые соединения
Основными достоинствами клеммовых соединений являются: простота
Детали машин
Клеммовые соединения
Основными достоинствами клеммовых соединений являются: простота

Детали машин
Клеммовые соединения
Из полученных выражений после преобразований определим
Детали машин
Клеммовые соединения
Из полученных выражений после преобразований определим

Детали машин
Лекция 18.
Сварные соединения
Общие положения
Классификация сварных соединений
Расчет
Детали машин
Лекция 18.
Сварные соединения
Общие положения
Классификация сварных соединений
Расчет

Детали машин
Общие положения
Сварные соединения образуются за счет сил
Детали машин
Общие положения
Сварные соединения образуются за счет сил

Детали машин
Общие положения. Способы сварки
Недостатки сварных соединений:
коробление деталей из-за
Детали машин
Общие положения. Способы сварки
Недостатки сварных соединений:
коробление деталей из-за

Детали машин
Способы сварки
2. Автоматическая электродуговая сварка под флюсом.
Производится
Детали машин
Способы сварки
2. Автоматическая электродуговая сварка под флюсом.
Производится

Детали машин
Классификация сварных соединений
В зависимости от взаимного расположения соединяемых
Детали машин
Классификация сварных соединений
В зависимости от взаимного расположения соединяемых

Детали машин
Классификация сварных соединений
Нахлесточные соединения выполняют угловыми шва-ми (см.
Детали машин
Классификация сварных соединений
Нахлесточные соединения выполняют угловыми шва-ми (см.

Детали машин
Классификация сварных соединений
Тавровые соединения используют для сварки деталей,
Детали машин
Классификация сварных соединений
Тавровые соединения используют для сварки деталей,

Детали машин
Рекомендации для конструирования сварных соединений
1. Минимальная длина шва должна быть
Детали машин
Рекомендации для конструирования сварных соединений
1. Минимальная длина шва должна быть

Детали машин
Расчет соединений на прочность
Основным требованием при проектировании сварных кон-струкций
Детали машин
Расчет соединений на прочность
Основным требованием при проектировании сварных кон-струкций

Детали машин
Расчет стыковых швов
Допускаемые напряжения для металла шва равны:
[σ’] =
Детали машин
Расчет стыковых швов
Допускаемые напряжения для металла шва равны:
[σ’] =

Детали машин
Расчет угловых швов
Нахлесточные соединения
Угловые швы рассчитывают на срез в
Детали машин
Расчет угловых швов
Нахлесточные соединения
Угловые швы рассчитывают на срез в

Детали машин
Соединение, нагруженное моментом в плоскости стыка
Если соединение нагружено
Детали машин
Соединение, нагруженное моментом в плоскости стыка
Если соединение нагружено

Детали машин
Соединение, нагруженное моментом в плоскости стыка
При нагружении моментом
Детали машин
Соединение, нагруженное моментом в плоскости стыка
При нагружении моментом

Детали машин
Соединение, нагруженное моментом и силой
При нагружении соединения силой
Детали машин
Соединение, нагруженное моментом и силой
При нагружении соединения силой

Детали машин
Соединение, нагруженное моментом и силой
Для соединения, показанного на
Детали машин
Соединение, нагруженное моментом и силой
Для соединения, показанного на
 Принцип суперпозиции полей
Принцип суперпозиции полей Молекулярно-кинетические свойства коллоидных систем
Молекулярно-кинетические свойства коллоидных систем Закон инерции. Взаимодействие тел. Масса тела
Закон инерции. Взаимодействие тел. Масса тела Неньютоновская жидкость
Неньютоновская жидкость Магнитные свойства вещества. 10 класс
Магнитные свойства вещества. 10 класс Электростатика. Работа поля над зарядом. Потенциал. Разность потенциалов
Электростатика. Работа поля над зарядом. Потенциал. Разность потенциалов Зубчатые передачи
Зубчатые передачи Условие равновесия рычага
Условие равновесия рычага Ядерные энергетические установки прямого и машинного преобразования энергии космического и напланетного назначения
Ядерные энергетические установки прямого и машинного преобразования энергии космического и напланетного назначения Решение задач. Закон всемирного тяготения.
Решение задач. Закон всемирного тяготения. Расчет магистрального газопровода
Расчет магистрального газопровода Презентация для будущих первоклассников на тему Я - наблюдатель
Презентация для будущих первоклассников на тему Я - наблюдатель Архимед күші
Архимед күші Устройство и техническое обслуживание аккумуляторных батарей
Устройство и техническое обслуживание аккумуляторных батарей Световые явления в живой и неживой природе
Световые явления в живой и неживой природе Проектування розвитку електричної мережі 110 кВ Полтавської області
Проектування розвитку електричної мережі 110 кВ Полтавської області Излучение и поглощение энергии атомами и молекулами. Лазеры
Излучение и поглощение энергии атомами и молекулами. Лазеры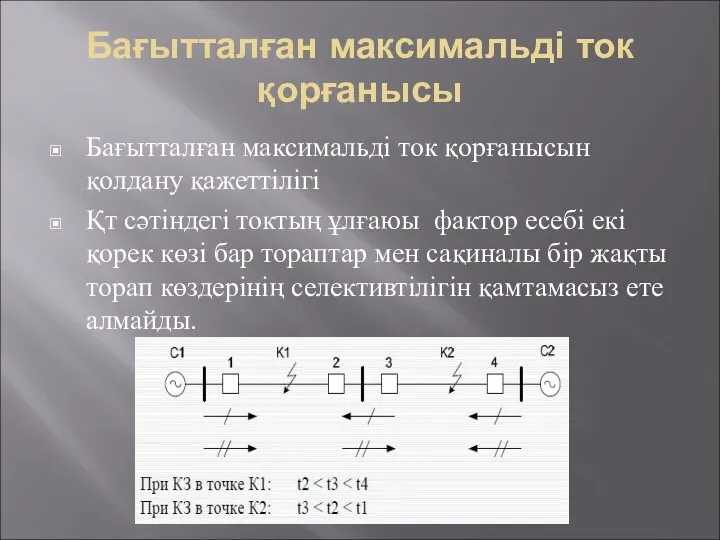 Бағытталған максимальді ток қорғанысы
Бағытталған максимальді ток қорғанысы Rotation of rigid bodies. Angular momentum and torque. Properties of fluids
Rotation of rigid bodies. Angular momentum and torque. Properties of fluids Количество теплоты. Единицы количества теплоты. Удельная теплоемкость. Расчет количества теплоты
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость. Расчет количества теплоты Электрический ток в жидкостях
Электрический ток в жидкостях Судовые двигатели
Судовые двигатели Сила Архимеда
Сила Архимеда Оборудование для смазочно-заправочных работ
Оборудование для смазочно-заправочных работ Точність обробки. (Лекция 3)
Точність обробки. (Лекция 3) Обработка экспериментальных данных. Часть 2
Обработка экспериментальных данных. Часть 2 Женские тропинки в космосе
Женские тропинки в космосе Параллельное и последовательное соединение проводников
Параллельное и последовательное соединение проводников