- Динамика поступательного и вращательного движения твердого тела

Содержание
- 2. Часть 1. Основные законы динамики Динамика - раздел механики, в котором изучается движение тел под действием
- 3. Инертность (или инерция) -- свойство тела сохранить неизменным состояние покоя или равномерного прямолинейного движения. Количественная мера
- 4. Первый закон динамики Инерциальная система отсчета - такая система, в которой при отсутствии воздействия со стороны
- 5. Импульс тела (или количество движения) p − это векторная физическая величина, равная произведению массы тела на
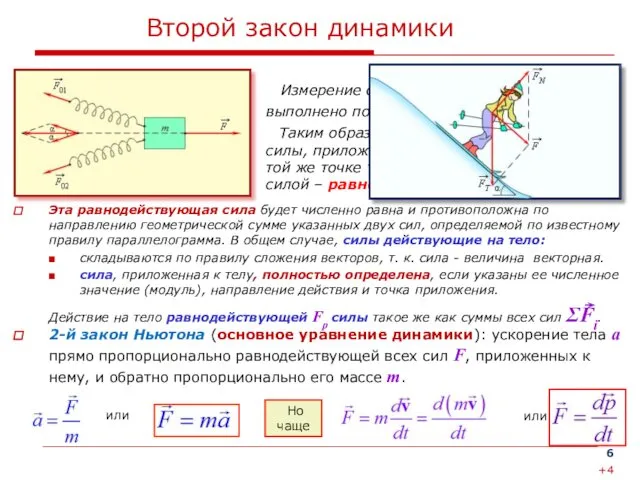
- 6. Второй закон динамики Эта равнодействующая сила будет численно равна и противоположна по направлению геометрической сумме указанных
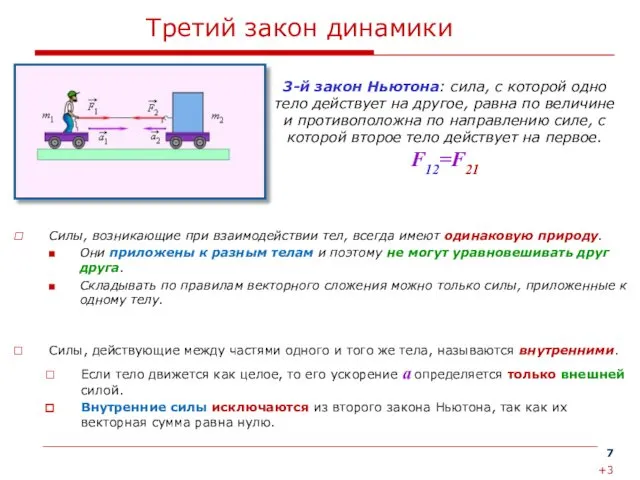
- 7. Третий закон динамики Силы, возникающие при взаимодействии тел, всегда имеют одинаковую природу. Они приложены к разным
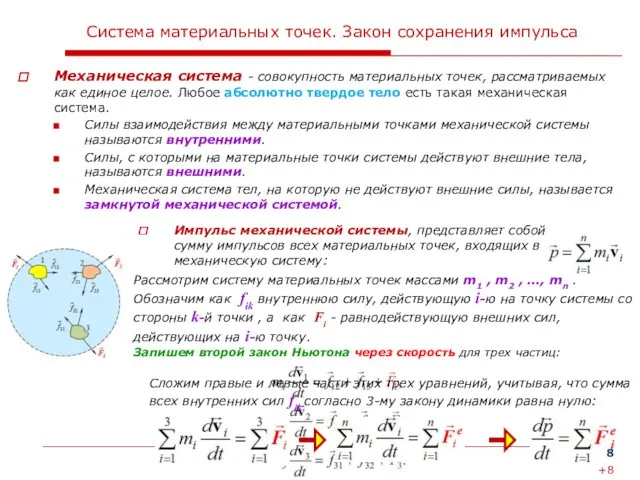
- 8. Система материальных точек. Закон сохранения импульса Механическая система - совокупность материальных точек, рассматриваемых как единое целое.
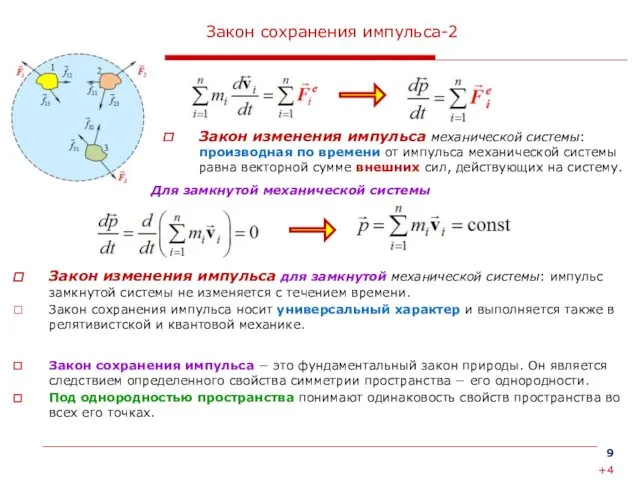
- 9. Закон сохранения импульса-2 Закон изменения импульса для замкнутой механической системы: импульс замкнутой системы не изменяется с
- 10. Центр масс абсолютно твердого тела Соблазнительно заменить изучение совокупности материальных точек АТТ одной точкой, в которой
- 11. Силы в механике Для сведения нахождение закона движения тела к чисто математической задаче, необходимо знать действующую
- 12. Гравитационные силы Согласно закону всемирного тяготения сила гравитационного притяжения Fг между двумя материальными точками пропорциональна произведению
- 13. Сила тяжести и центр тяжести тела Под действием силы тяжести FТ все тела падают с одинаковым
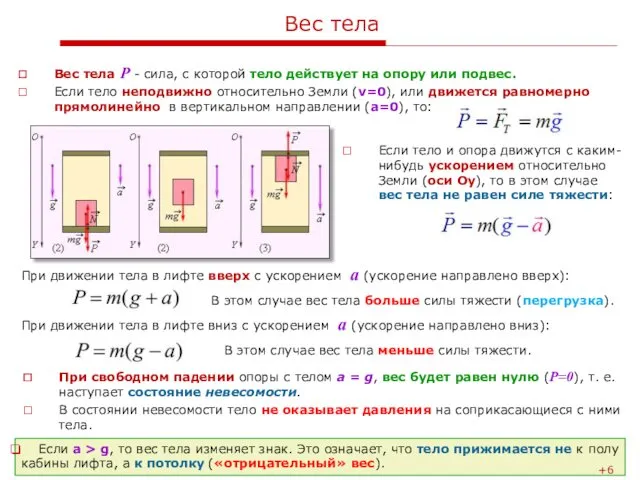
- 14. Вес тела Вес тела Р - сила, с которой тело действует на опору или подвес. Если
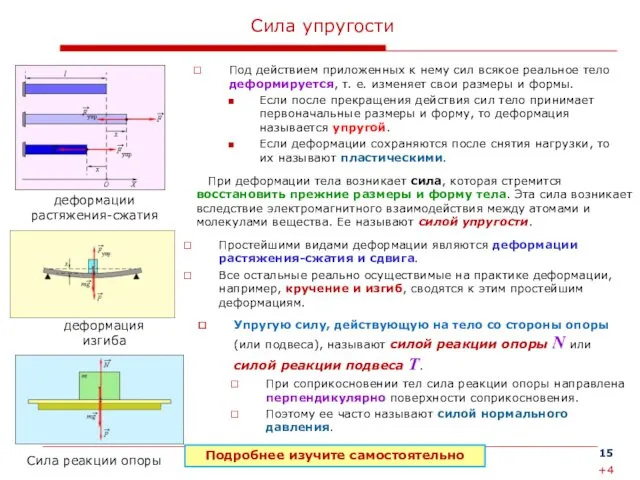
- 15. Сила упругости Под действием приложенных к нему сил всякое реальное тело деформируется, т. е. изменяет свои
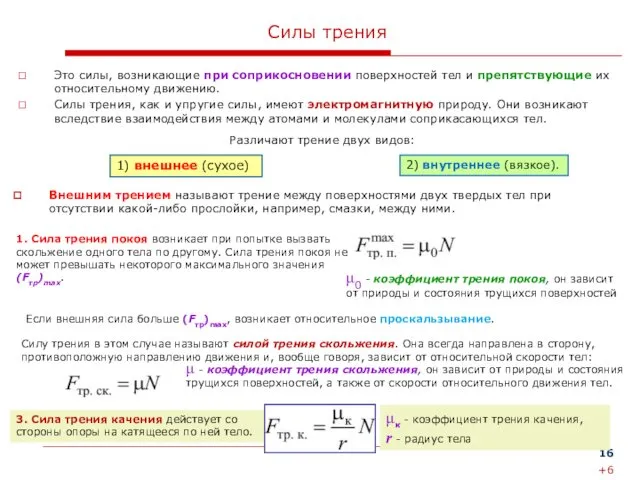
- 16. Силы трения Это силы, возникающие при соприкосновении поверхностей тел и препятствующие их относительному движению. Силы трения,
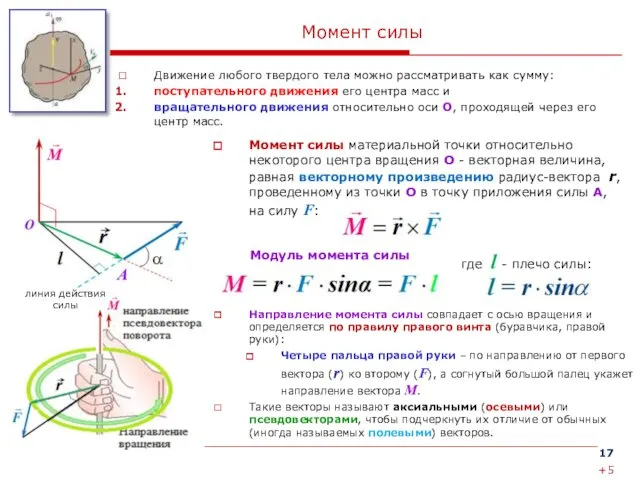
- 17. Момент силы Движение любого твердого тела можно рассматривать как сумму: поступательного движения его центра масс и
- 18. Проекция момента силы M на произвольную ось Момент силы M характеризует способность силы вращать тело вокруг
- 19. Проекция момента импульса L на произвольную ось Момент импульса L характеризует способность силы изменять вращение тела
- 20. Основное уравнение динамики вращательного движения для материальной точки Продифференцируем это уравнение по времени t : F
- 21. Основное уравнение динамики вращательного движения для системы материальных точек Вывод: изменение момента импульса L системы определяется
- 22. Закон сохранения момента импульса У незамкнутых систем может сохраняться не сам момент импульса L, а его
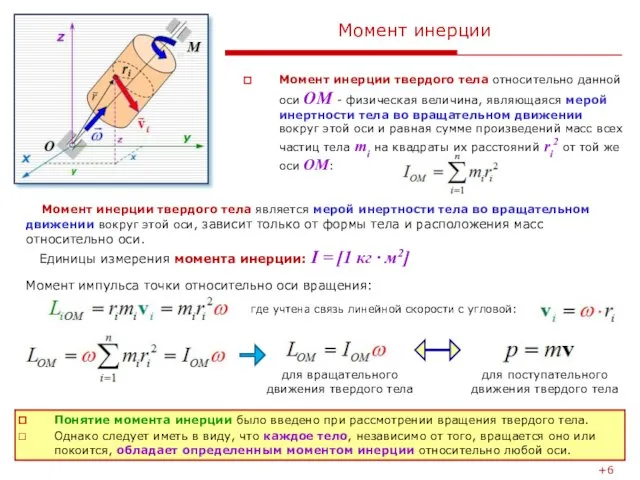
- 23. Момент инерции Момент инерции твердого тела относительно данной оси OM - физическая величина, являющаяся мерой инертности
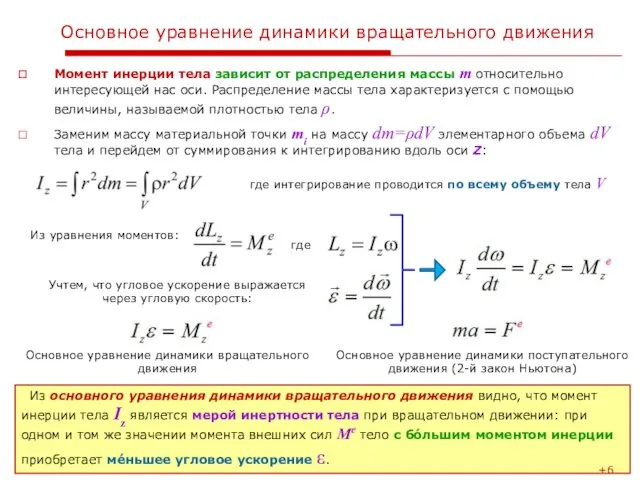
- 24. Основное уравнение динамики вращательного движения Момент инерции тела зависит от распределения массы m относительно интересующей нас
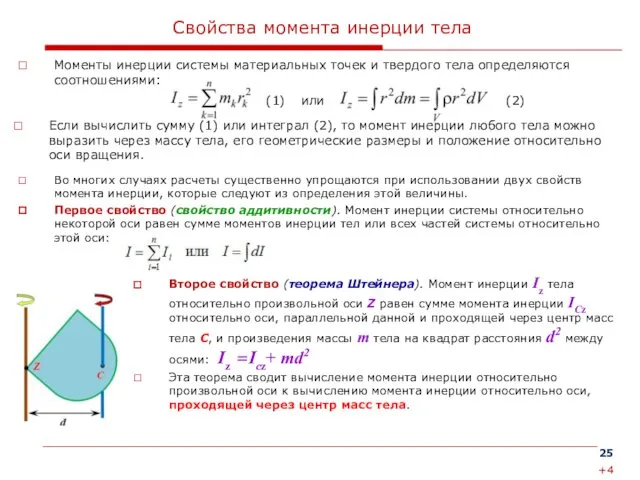
- 25. Свойства момента инерции тела Моменты инерции системы материальных точек и твердого тела определяются соотношениями: Во многих
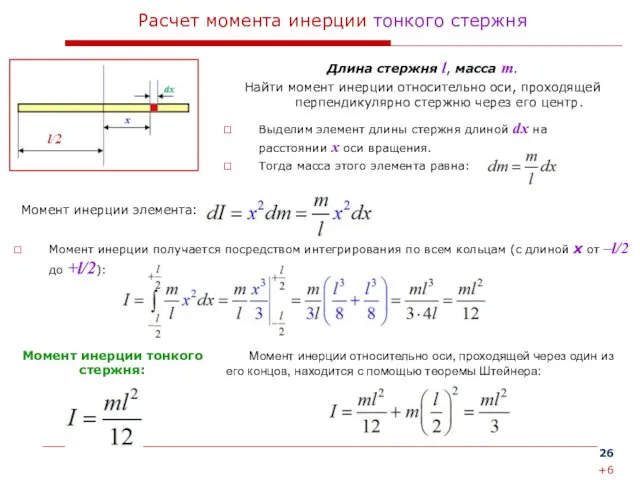
- 26. Расчет момента инерции тонкого стержня Длина стержня l, масса m. Найти момент инерции относительно оси, проходящей
- 27. Заучите основные моменты инерции простых тел +1
- 29. Скачать презентацию
Часть 1. Основные законы динамики
Динамика - раздел механики, в котором
Часть 1. Основные законы динамики
Динамика - раздел механики, в котором
Инертность (или инерция) -- свойство тела сохранить неизменным состояние покоя или
Инертность (или инерция) -- свойство тела сохранить неизменным состояние покоя или
Первый закон динамики
Инерциальная система отсчета - такая система, в которой при
Первый закон динамики
Инерциальная система отсчета - такая система, в которой при
Импульс тела (или количество движения) p − это векторная физическая величина,
Импульс тела (или количество движения) p − это векторная физическая величина,
Второй закон динамики
Эта равнодействующая сила будет численно равна и противоположна по
Второй закон динамики
Эта равнодействующая сила будет численно равна и противоположна по
Третий закон динамики
Силы, возникающие при взаимодействии тел, всегда имеют одинаковую природу.
Они
Третий закон динамики
Силы, возникающие при взаимодействии тел, всегда имеют одинаковую природу.
Они
Система материальных точек. Закон сохранения импульса
Механическая система - совокупность материальных точек,
Система материальных точек. Закон сохранения импульса
Механическая система - совокупность материальных точек,
Закон сохранения импульса-2
Закон изменения импульса для замкнутой механической системы: импульс замкнутой
Закон сохранения импульса-2
Закон изменения импульса для замкнутой механической системы: импульс замкнутой
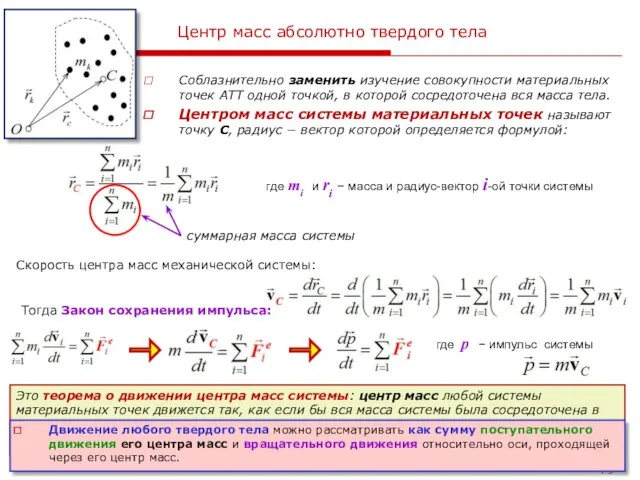
Центр масс абсолютно твердого тела
Соблазнительно заменить изучение совокупности материальных точек АТТ
Центр масс абсолютно твердого тела
Соблазнительно заменить изучение совокупности материальных точек АТТ
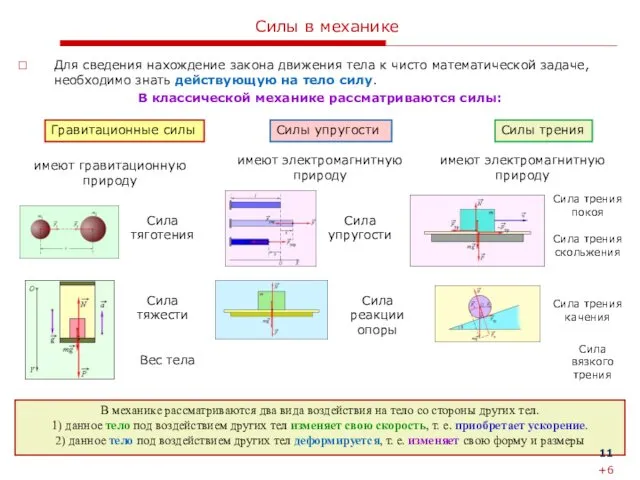
Силы в механике
Для сведения нахождение закона движения тела к чисто математической
Силы в механике
Для сведения нахождение закона движения тела к чисто математической
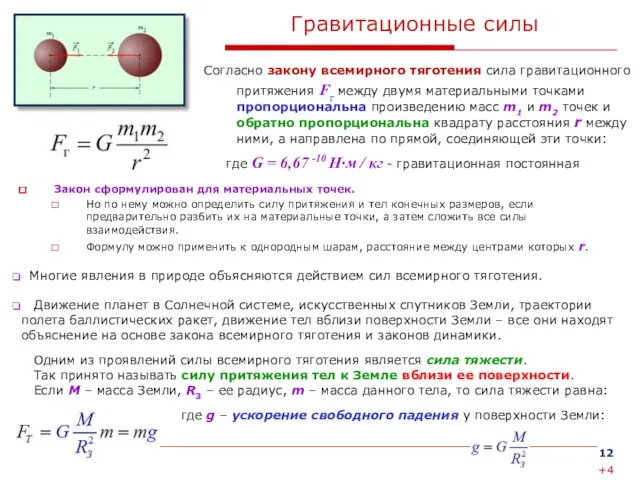
Гравитационные силы
Согласно закону всемирного тяготения сила гравитационного притяжения Fг между двумя
Гравитационные силы
Согласно закону всемирного тяготения сила гравитационного притяжения Fг между двумя
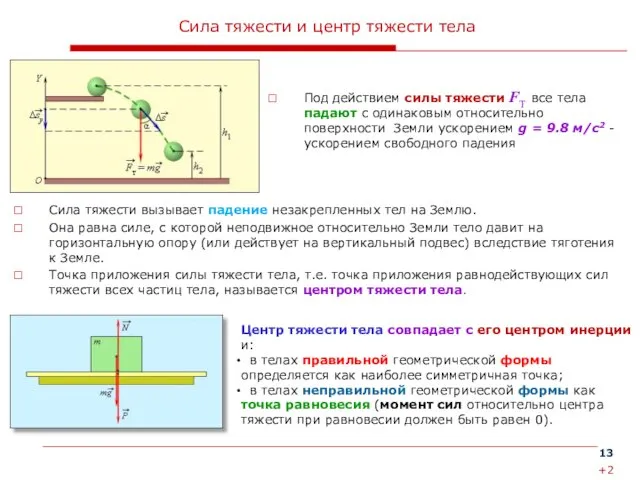
Сила тяжести и центр тяжести тела
Под действием силы тяжести FТ все
Сила тяжести и центр тяжести тела
Под действием силы тяжести FТ все
Вес тела
Вес тела Р - сила, с которой тело действует на
Вес тела
Вес тела Р - сила, с которой тело действует на
Сила упругости
Под действием приложенных к нему сил всякое реальное тело деформируется,
Сила упругости
Под действием приложенных к нему сил всякое реальное тело деформируется,
Силы трения
Это силы, возникающие при соприкосновении поверхностей тел и препятствующие их
Силы трения
Это силы, возникающие при соприкосновении поверхностей тел и препятствующие их
Момент силы
Движение любого твердого тела можно рассматривать как сумму:
поступательного движения его
Момент силы
Движение любого твердого тела можно рассматривать как сумму:
поступательного движения его
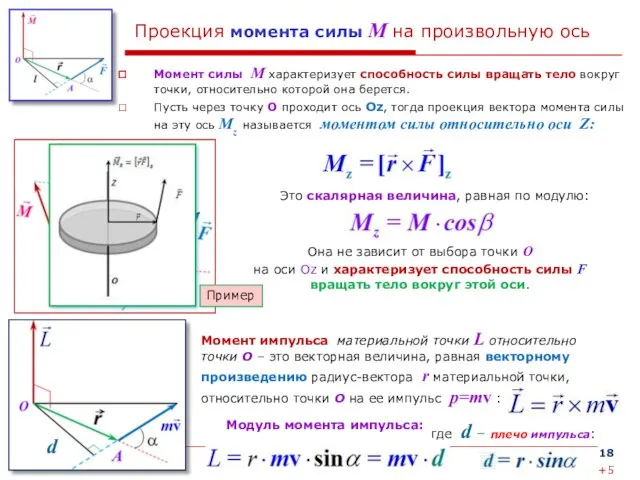
Проекция момента силы M на произвольную ось
Момент силы M характеризует способность
Проекция момента силы M на произвольную ось
Момент силы M характеризует способность
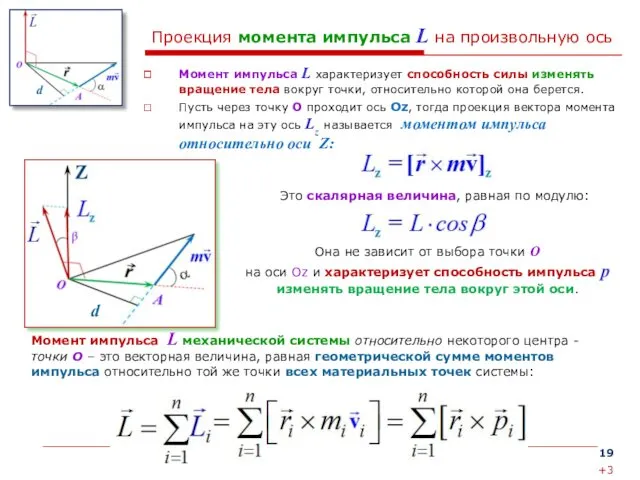
Проекция момента импульса L на произвольную ось
Момент импульса L характеризует способность
Проекция момента импульса L на произвольную ось
Момент импульса L характеризует способность
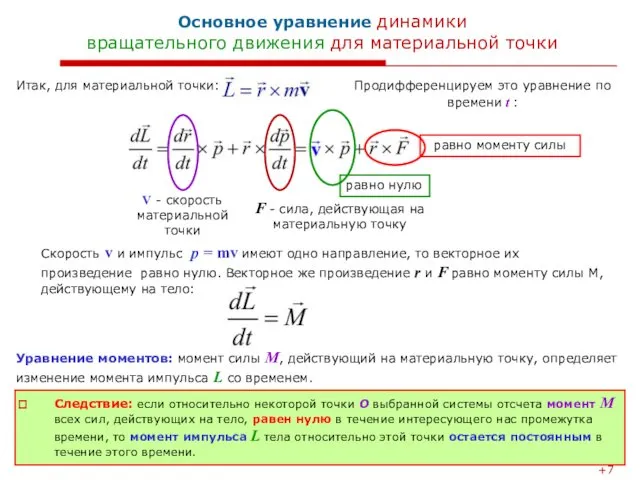
Основное уравнение динамики
вращательного движения для материальной точки
Продифференцируем это уравнение по
Основное уравнение динамики
вращательного движения для материальной точки
Продифференцируем это уравнение по

Основное уравнение динамики
вращательного движения для системы материальных точек
Вывод: изменение момента
Основное уравнение динамики
вращательного движения для системы материальных точек
Вывод: изменение момента
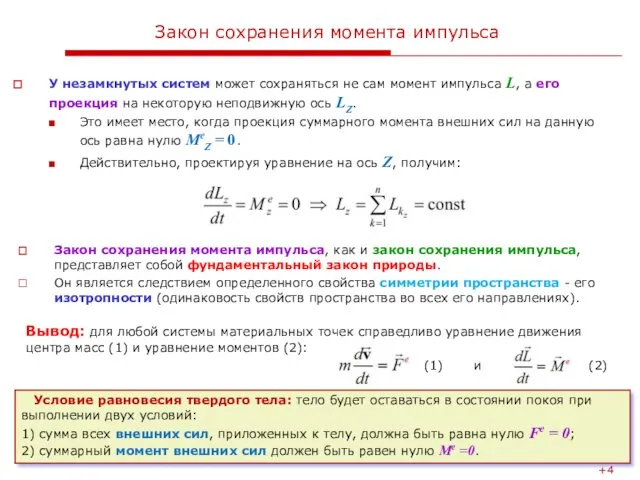
Закон сохранения момента импульса
У незамкнутых систем может сохраняться не сам момент
Закон сохранения момента импульса
У незамкнутых систем может сохраняться не сам момент
Момент инерции
Момент инерции твердого тела относительно данной оси OM - физическая
Момент инерции
Момент инерции твердого тела относительно данной оси OM - физическая
Основное уравнение динамики вращательного движения
Момент инерции тела зависит от распределения
Основное уравнение динамики вращательного движения
Момент инерции тела зависит от распределения
Свойства момента инерции тела
Моменты инерции системы материальных точек и твердого тела
Свойства момента инерции тела
Моменты инерции системы материальных точек и твердого тела
Расчет момента инерции тонкого стержня
Длина стержня l, масса m.
Найти момент
Расчет момента инерции тонкого стержня
Длина стержня l, масса m.
Найти момент

Заучите основные моменты инерции простых тел
+1
Заучите основные моменты инерции простых тел
+1
 Свойства воды
Свойства воды Решение задач по теме Законы Ньютона
Решение задач по теме Законы Ньютона Рабочий режим насоса и его регулирование. (Лекция 7)
Рабочий режим насоса и его регулирование. (Лекция 7) Какое движение называют механическим?
Какое движение называют механическим? Молекулярно-кинетическая теория вещества
Молекулярно-кинетическая теория вещества Презентация Задачи по физике. 7 класс.(Г. Остер)
Презентация Задачи по физике. 7 класс.(Г. Остер) Стартовая презентация к проекту Зрение и компьютер
Стартовая презентация к проекту Зрение и компьютер Водородная бомба
Водородная бомба Презентация по теме: Механические колебания
Презентация по теме: Механические колебания Замедление нейтронов. Уравнение переноса
Замедление нейтронов. Уравнение переноса Основные уравнения электростатики в вакууме. (Лекция 2)
Основные уравнения электростатики в вакууме. (Лекция 2) Исследовательская работа учащихся .
Исследовательская работа учащихся . Повторительно-обобщающий урок по теме Движение и взаимодействие тел (7 класс)
Повторительно-обобщающий урок по теме Движение и взаимодействие тел (7 класс) Презентация к Научно-исследовательской работе Физика и ВОВ
Презентация к Научно-исследовательской работе Физика и ВОВ Аккумуляторные батареи. Назначение аккумуляторных батарей и их основные характеристики
Аккумуляторные батареи. Назначение аккумуляторных батарей и их основные характеристики Магнитное поле Земли
Магнитное поле Земли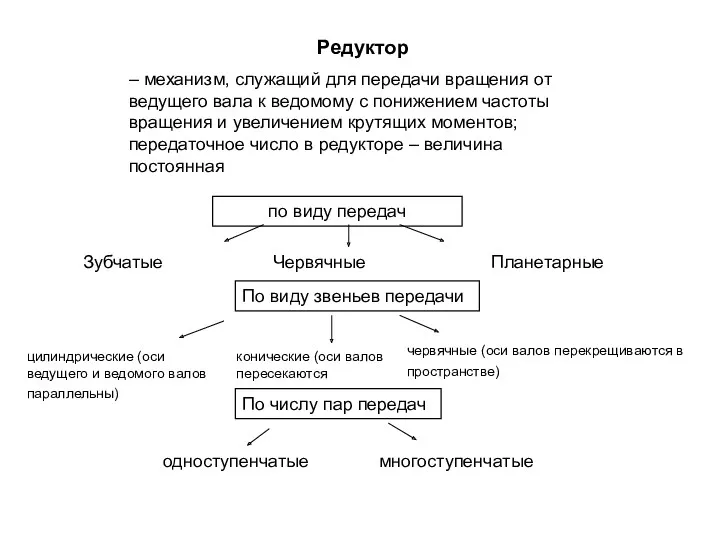 Редукторы по виду передач, по виду звеньев передачи, по числу пар передач
Редукторы по виду передач, по виду звеньев передачи, по числу пар передач Происхождение элементов
Происхождение элементов Способы изменения внутренней энергии
Способы изменения внутренней энергии Вес тела. Сила тяжести. Динамометр
Вес тела. Сила тяжести. Динамометр Презентация к уроку Виды сил. Равнодействующая сила. Правила сложения сил для 7 класса
Презентация к уроку Виды сил. Равнодействующая сила. Правила сложения сил для 7 класса Природа света. Световые волны. Законы отражения и преломления. Интерференция. Дифракция
Природа света. Световые волны. Законы отражения и преломления. Интерференция. Дифракция Интегрированный урок физика- математика Применение производной при решении физических задач
Интегрированный урок физика- математика Применение производной при решении физических задач Изотопы. Радиоактивные превращения атомных ядер
Изотопы. Радиоактивные превращения атомных ядер Адсорбция үдерісі
Адсорбция үдерісі Растяжение и сжатие
Растяжение и сжатие Устройство колесных пар
Устройство колесных пар История патефона
История патефона