- Электрические машины

Содержание
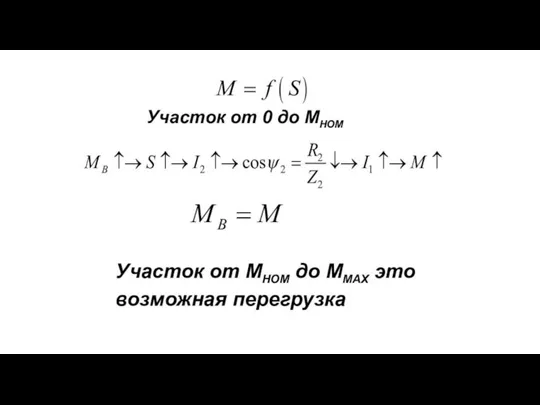
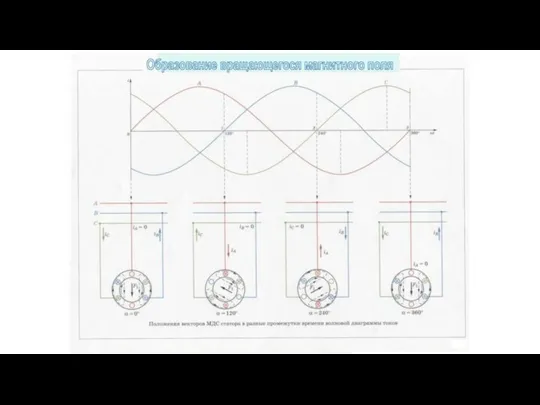
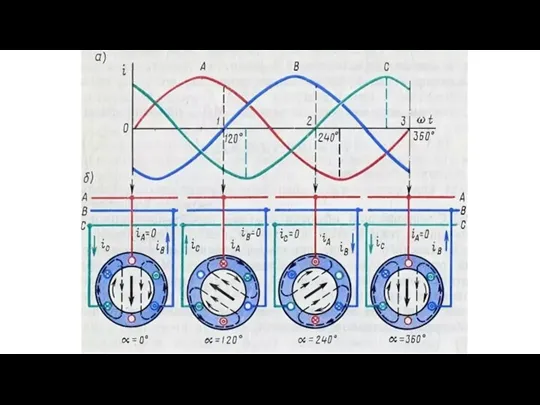
- 2. Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент
- 3. Параметры схемы замещения асинхронной машины r2 r`2, х1 и х`2,, с некоторым приближением можно считать постоянными
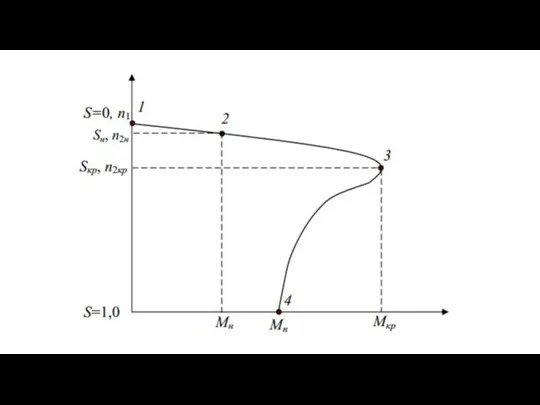
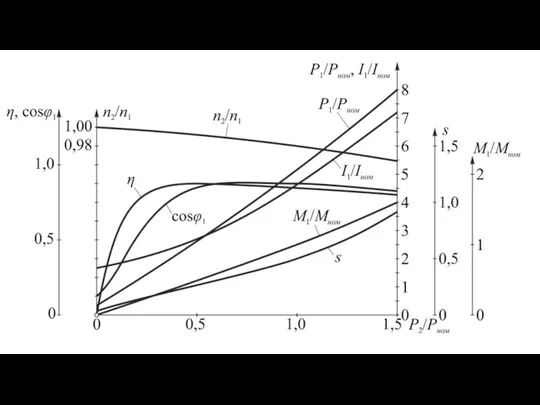
- 5. Электромагнитный момент и механические характеристики асинхронного двигателя
- 8. Приближенный расчет механической характеристики АД Применение формулы для расчета механических характеристик асинхронных двигателей не всегда возможно,
- 11. Для асинхронных двигателей с фазным ротором в опыте холостого хода определяют коэффициент трансформации напряжений между обмотками
- 12. Температуру θ (°С) обмотки обычно определяют по сопротивлению фазы r1’, измеренному непосредственно после проведения опыта, по
- 13. Пусковые свойства асинхронного двигателя оцениваются его пусковыми характеристиками: а) величиной пускового тока Iп или его кратностью
- 15. На практике широко используются следующие типы запуска двигателя: прямой пуск; звезда-треугольник; плавный пуск; Пуск двигателя с
- 17. Пуск непосредственным включением в сеть
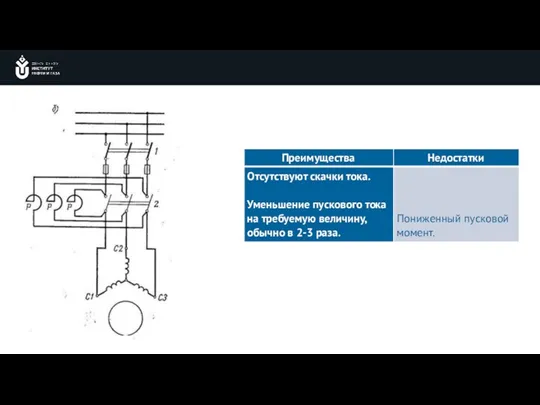
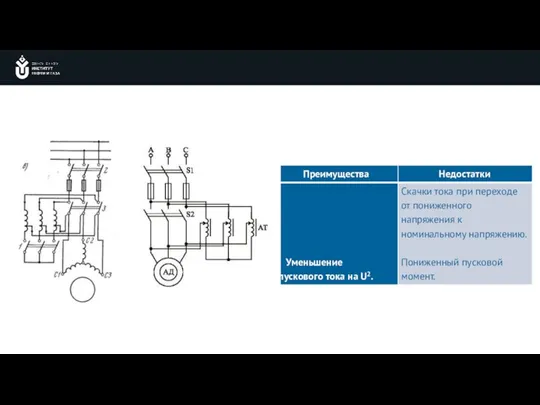
- 18. Пуск при пониженном напряжении.
- 21. Запуск при помощи частотного преобразователя
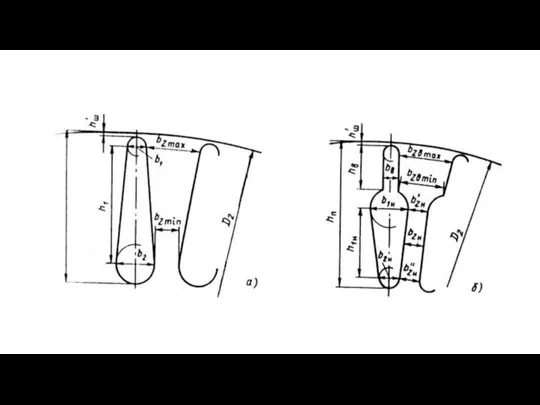
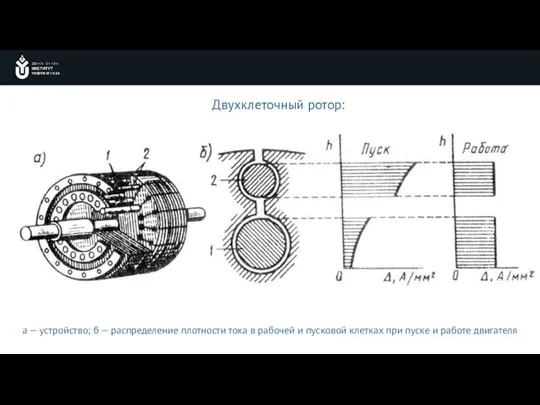
- 22. Короткозамкнутые асинхронные двигатели с улучшенными пусковыми характеристиками Двигатель с глубокими пазами на роторе а — устройство,
- 24. а — устройство; б — распределение плотности тока в рабочей и пусковой клетках при пуске и
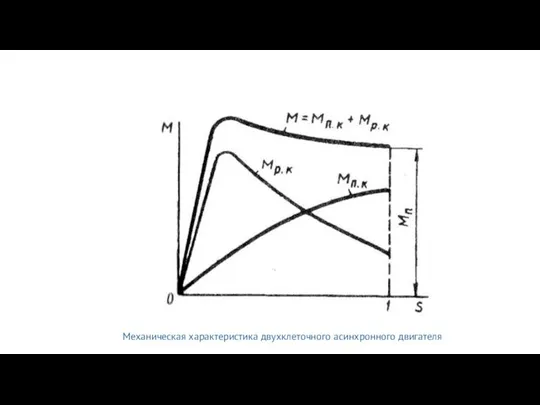
- 25. Механическая характеристика двухклеточного асинхронного двигателя
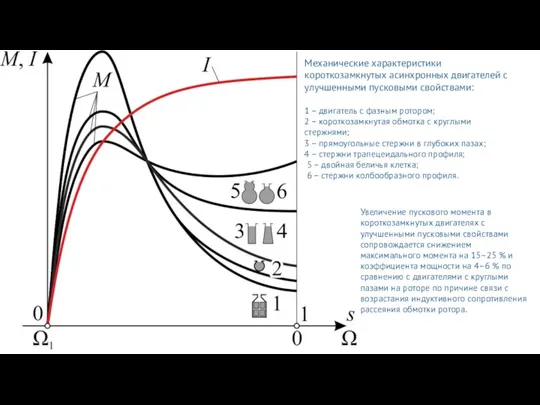
- 26. Механические характеристики короткозамкнутых асинхронных двигателей с улучшенными пусковыми свойствами: 1 – двигатель с фазным ротором; 2
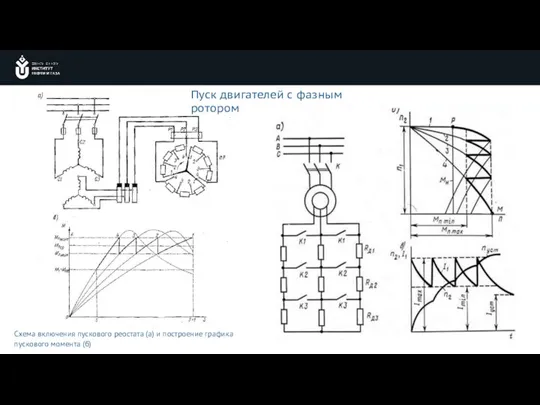
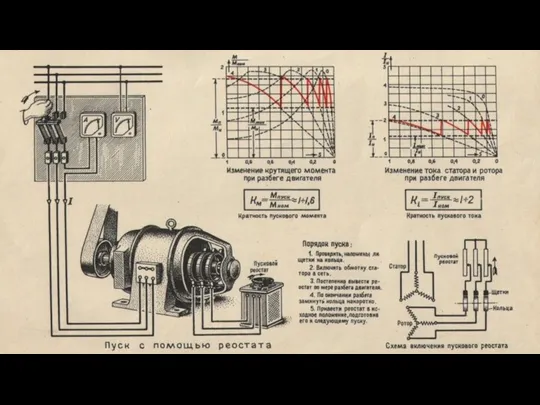
- 27. Пуск двигателей с фазным ротором Схема включения пускового реостата (а) и построение графика пускового момента (б)
- 28. Классификация способов регулирования асинхронных двигателей
- 29. Регулирование частоты вращения асинхронных двигателей Регулирование частоты вращения изменением скольжения s возможно тремя способами: изменением подводимого
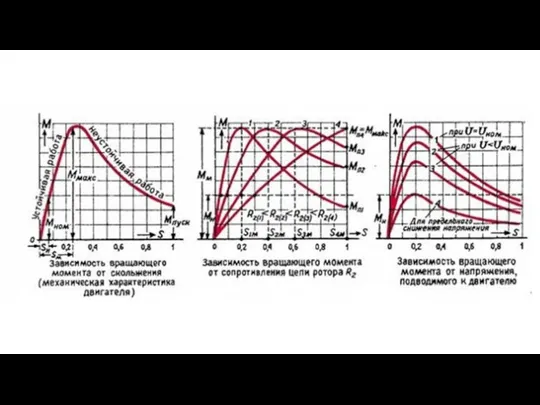
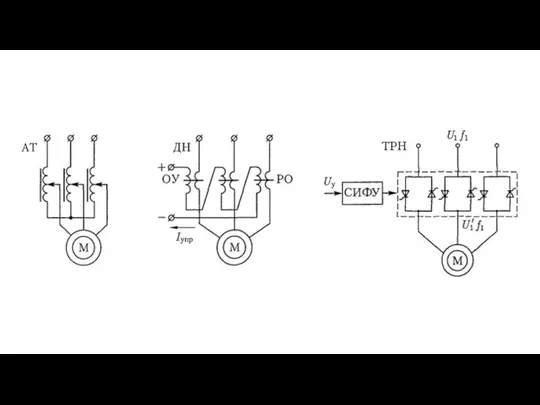
- 30. Регулирование частоты вращения изменением подводимого напряжения. Влияние напряжения на вид механической характеристики асинхронного двигателя
- 32. Регулирование частоты вращения нарушением симметрии подводимого напряжения. Механические характеристики (а) и схема включения (б) асинхронного двигателя
- 33. Механические характеристики при регулировании частоты вращения ротора изменением подводимого напряжения, введением в цепь обмотки ротора дополнительного
- 34. Влияние активного сопротивления обмотки ротора на механическую характеристику асинхронного двигателя Регулирование частоты вращения изменением активного сопротивления
- 35. Регулирование частоты вращения изменением частоты тока в статоре. закона изменения момента нагрузки и определяется уравнением где
- 36. Наибольшее применение для частотного регулирования асинхронных двигателей получили тиристорные преобразователи частоты ТПЧ. Обычно такой преобразователь состоит
- 37. Регулирование частоты вращения изменением числа полюсов обмотки статора Схемы включения обмотки статора на разное число полюсов
- 38. Схемы переключения числа полюсов и механические характеристики в режимах постоянного момента (а) и постоянной скорости (б)
- 39. Импульсное регулирование частоты вращения. Импульсное регулирование посредством контактора К не обеспечивает достаточной надежности работы привода из-за
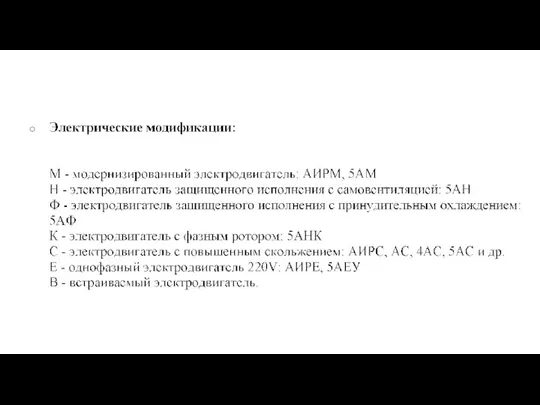
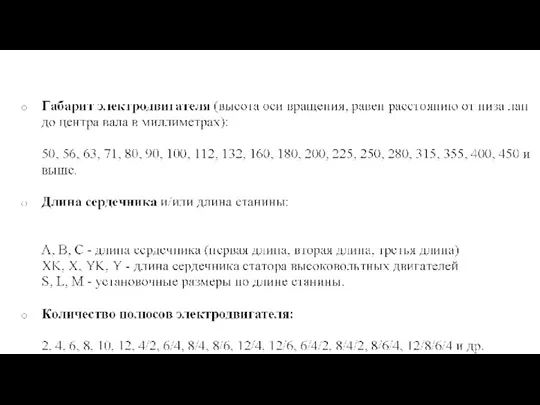
- 50. В серии приняты следующие обозначения двигателей: 4А0102030004050607008: 4— Порядковый номер серии (четвертая) А— Род двигателя (асинхронный)
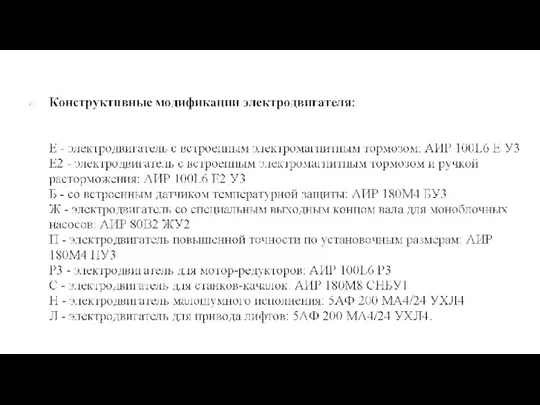
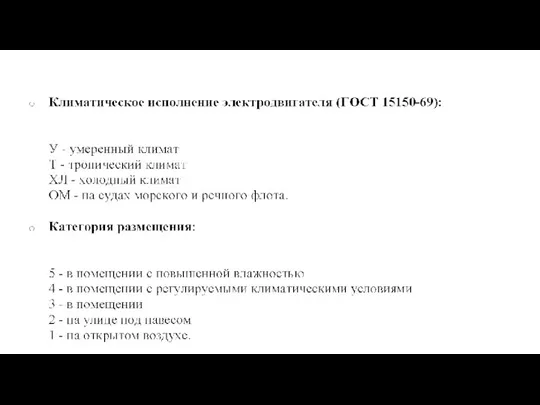
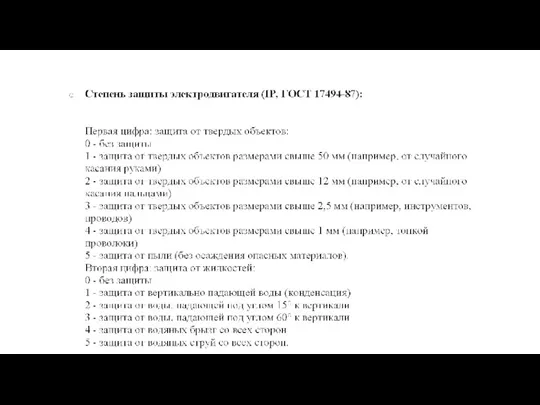
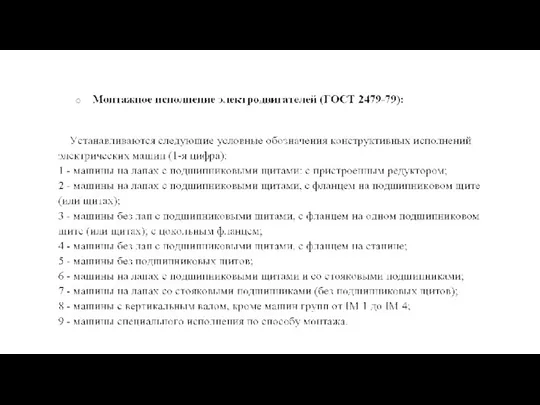
- 51. Примеры обозначения двигателей 4А180М4У3 — асинхронный двигатель 4-й серии, закрытого обдуваемого исполнения с короткозамкнутым ротором, с
- 59. Скачать презентацию

Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с
Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с

Параметры схемы замещения асинхронной машины r2 r`2, х1 и х`2,, с
Параметры схемы замещения асинхронной машины r2 r`2, х1 и х`2,, с
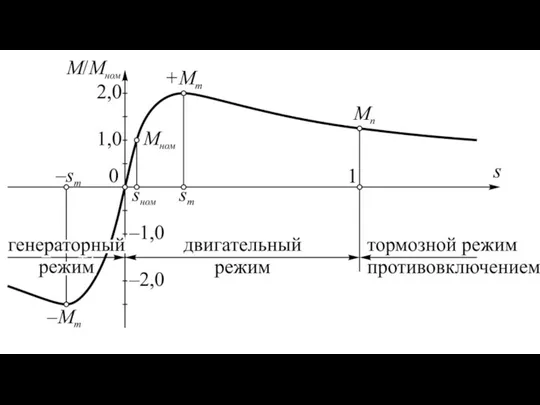

Электромагнитный момент и механические характеристики асинхронного двигателя
Электромагнитный момент и механические характеристики асинхронного двигателя
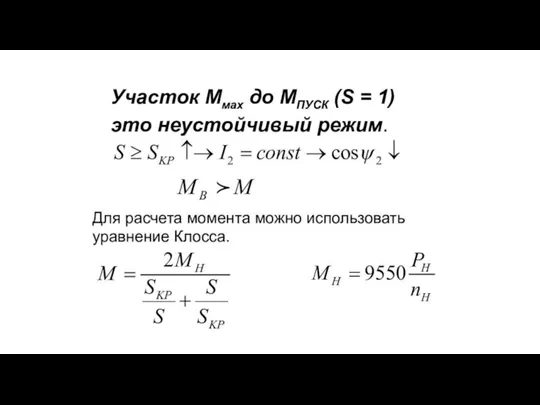

Приближенный расчет механической характеристики АД
Применение формулы для расчета механических характеристик асинхронных
Приближенный расчет механической характеристики АД
Применение формулы для расчета механических характеристик асинхронных
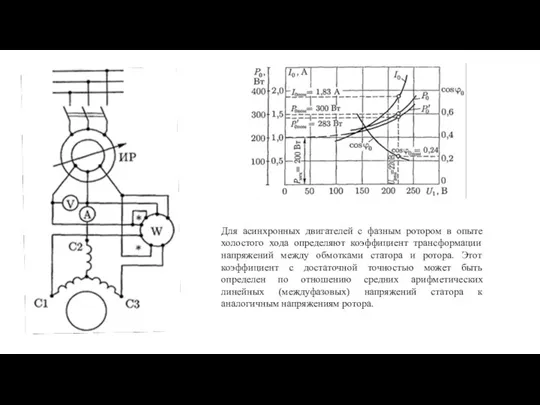
Для асинхронных двигателей с фазным ротором в опыте холостого хода определяют
Для асинхронных двигателей с фазным ротором в опыте холостого хода определяют

Температуру θ (°С) обмотки обычно определяют по сопротивлению фазы r1’, измеренному
Температуру θ (°С) обмотки обычно определяют по сопротивлению фазы r1’, измеренному
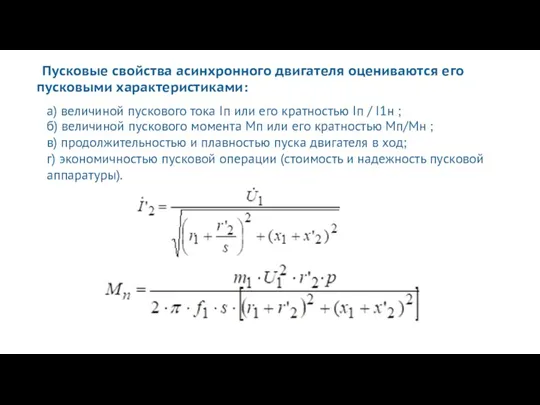
Пусковые свойства асинхронного двигателя оцениваются его пусковыми характеристиками:
а) величиной пускового тока
Пусковые свойства асинхронного двигателя оцениваются его пусковыми характеристиками:
а) величиной пускового тока

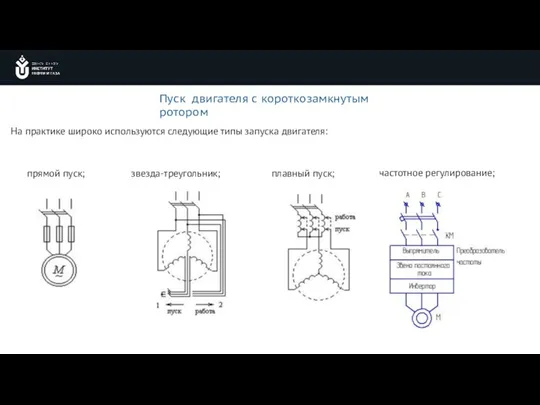
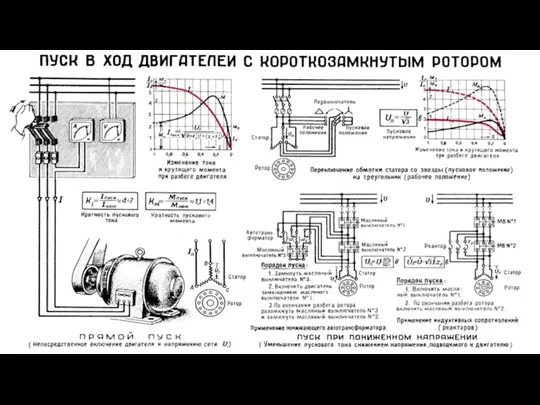
На практике широко используются следующие типы запуска двигателя:
прямой пуск; звезда-треугольник; плавный
На практике широко используются следующие типы запуска двигателя:
прямой пуск; звезда-треугольник; плавный
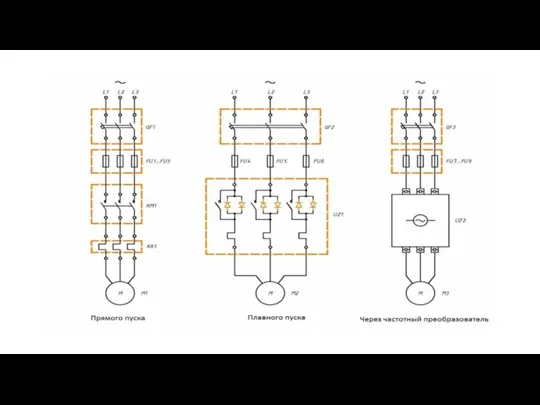
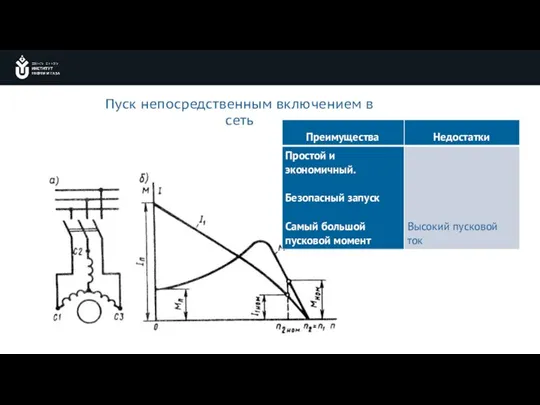
Пуск непосредственным включением в сеть
Пуск непосредственным включением в сеть
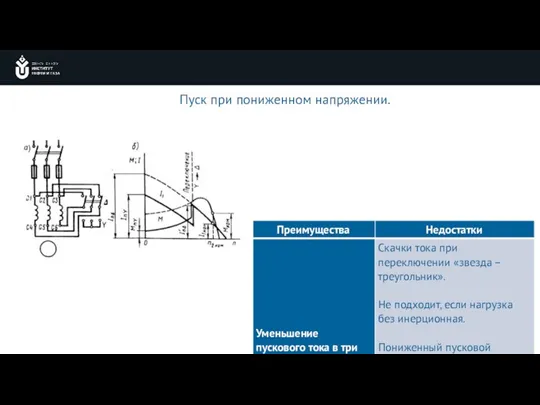
Пуск при пониженном напряжении.
Пуск при пониженном напряжении.
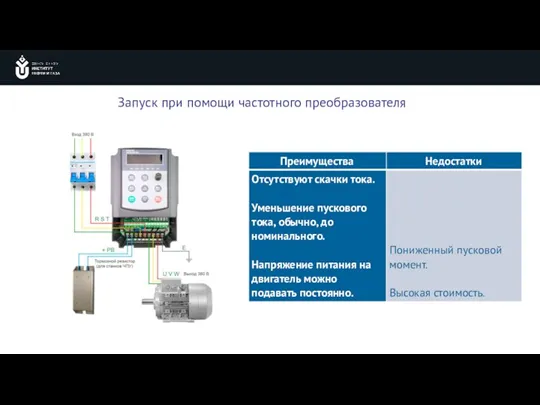
Запуск при помощи частотного преобразователя
Запуск при помощи частотного преобразователя
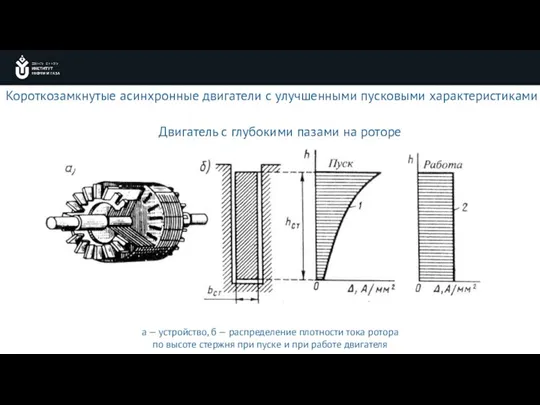
Короткозамкнутые асинхронные двигатели с улучшенными пусковыми характеристиками
Двигатель с глубокими пазами на
Короткозамкнутые асинхронные двигатели с улучшенными пусковыми характеристиками
Двигатель с глубокими пазами на
а — устройство; б — распределение плотности тока в рабочей и
а — устройство; б — распределение плотности тока в рабочей и
Механическая характеристика двухклеточного асинхронного двигателя
Механическая характеристика двухклеточного асинхронного двигателя
Механические характеристики короткозамкнутых асинхронных двигателей с улучшенными пусковыми свойствами:
1 –
Механические характеристики короткозамкнутых асинхронных двигателей с улучшенными пусковыми свойствами:
1 –
Пуск двигателей с фазным ротором
Схема включения пускового реостата (а) и построение
Пуск двигателей с фазным ротором
Схема включения пускового реостата (а) и построение
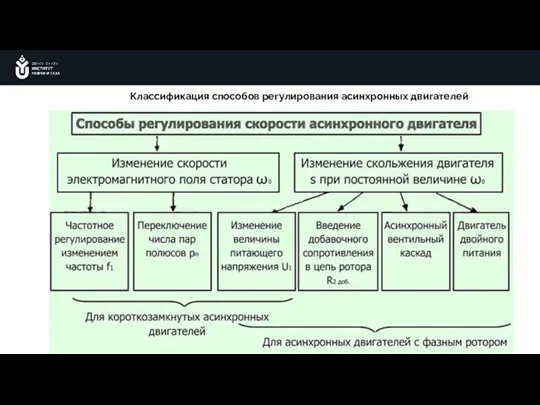
Классификация способов регулирования асинхронных двигателей
Классификация способов регулирования асинхронных двигателей
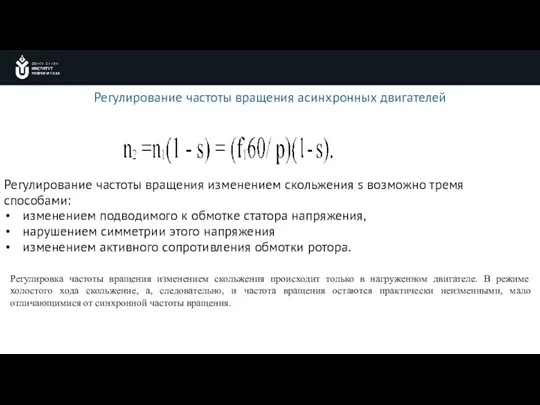
Регулирование частоты вращения асинхронных двигателей
Регулирование частоты вращения изменением скольжения s
Регулирование частоты вращения асинхронных двигателей
Регулирование частоты вращения изменением скольжения s
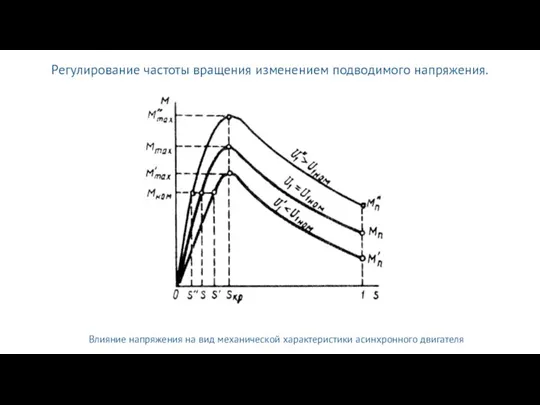
Регулирование частоты вращения изменением подводимого напряжения.
Влияние напряжения на вид механической
Регулирование частоты вращения изменением подводимого напряжения.
Влияние напряжения на вид механической
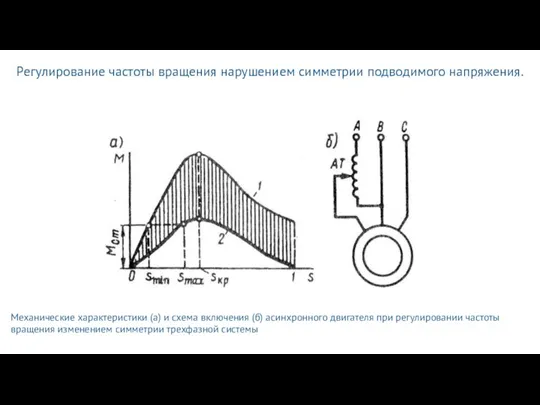
Регулирование частоты вращения нарушением симметрии подводимого напряжения.
Механические характеристики (а) и
Регулирование частоты вращения нарушением симметрии подводимого напряжения.
Механические характеристики (а) и
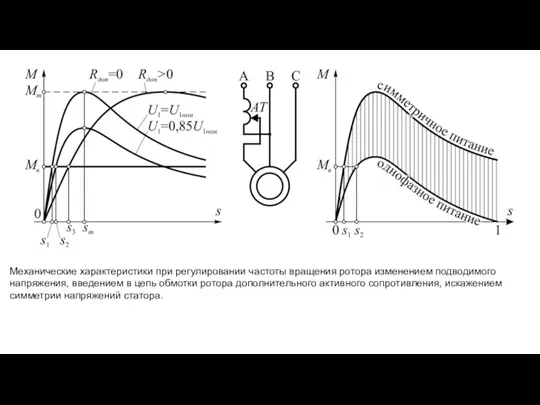
Механические характеристики при регулировании частоты вращения ротора изменением подводимого напряжения, введением
Механические характеристики при регулировании частоты вращения ротора изменением подводимого напряжения, введением
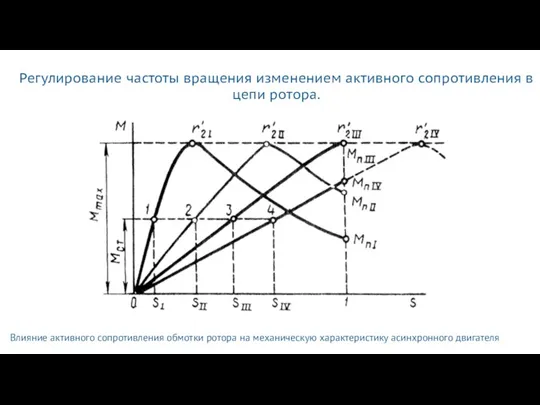
Влияние активного сопротивления обмотки ротора на механическую характеристику асинхронного двигателя
Регулирование
Влияние активного сопротивления обмотки ротора на механическую характеристику асинхронного двигателя
Регулирование
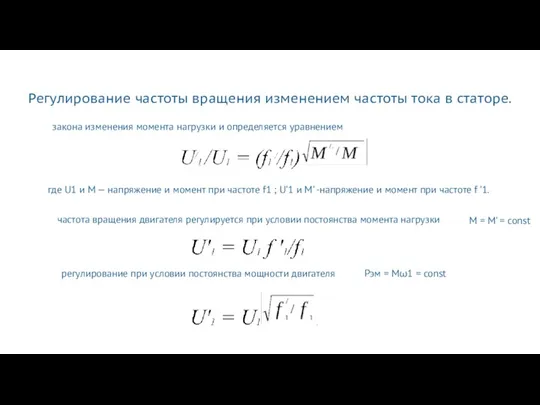
Регулирование частоты вращения изменением частоты тока в статоре.
закона изменения момента
Регулирование частоты вращения изменением частоты тока в статоре.
закона изменения момента
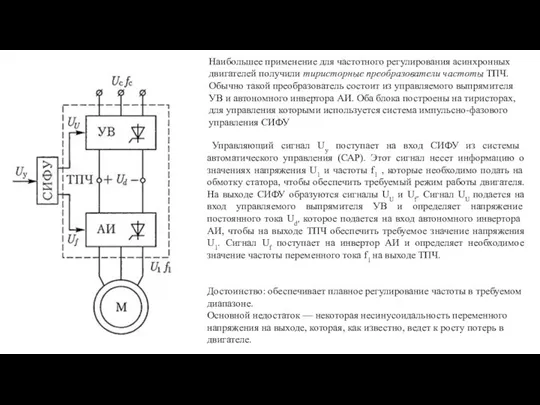
Наибольшее применение для частотного регулирования асинхронных двигателей получили тиристорные преобразователи частоты
Наибольшее применение для частотного регулирования асинхронных двигателей получили тиристорные преобразователи частоты
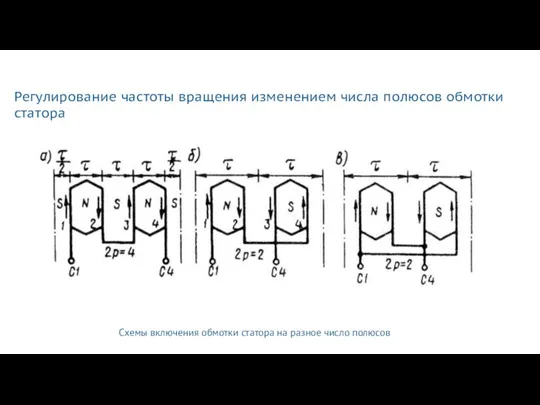
Регулирование частоты вращения изменением числа полюсов обмотки статора
Схемы включения обмотки статора
Регулирование частоты вращения изменением числа полюсов обмотки статора
Схемы включения обмотки статора
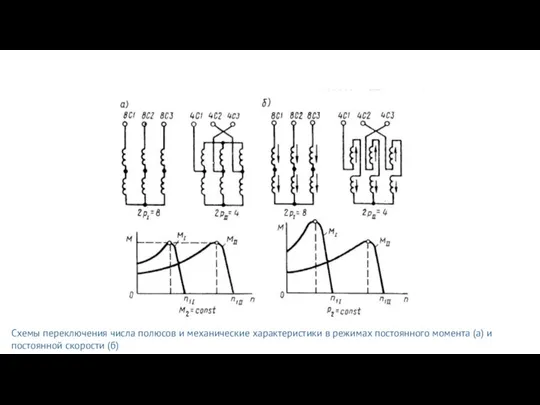
Схемы переключения числа полюсов и механические характеристики в режимах постоянного момента
Схемы переключения числа полюсов и механические характеристики в режимах постоянного момента
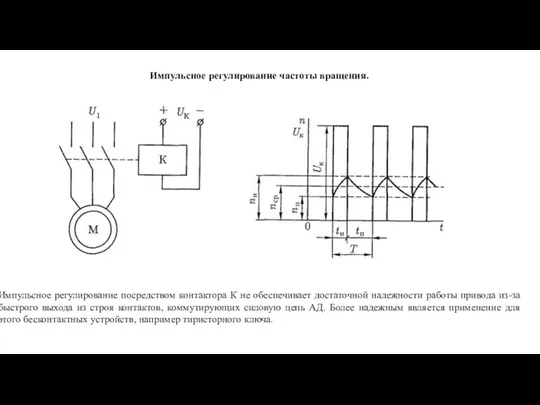
Импульсное регулирование частоты вращения.
Импульсное регулирование посредством контактора К не обеспечивает
Импульсное регулирование частоты вращения.
Импульсное регулирование посредством контактора К не обеспечивает
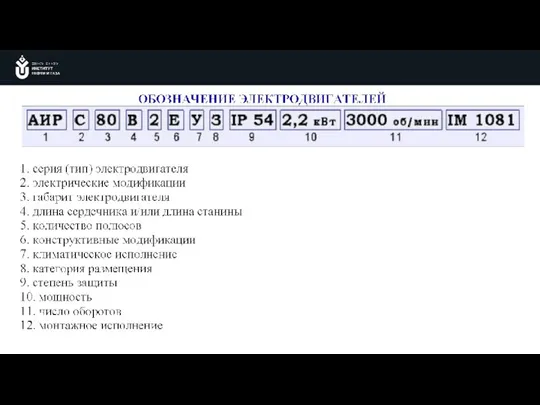
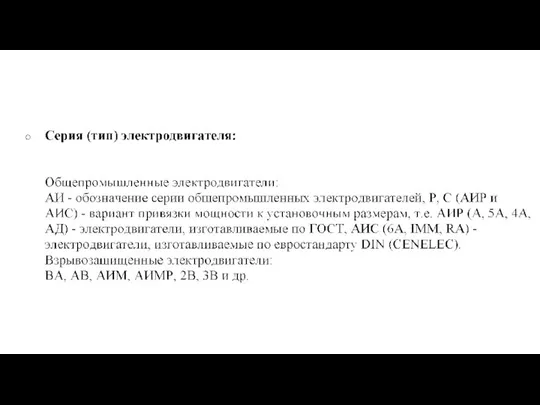

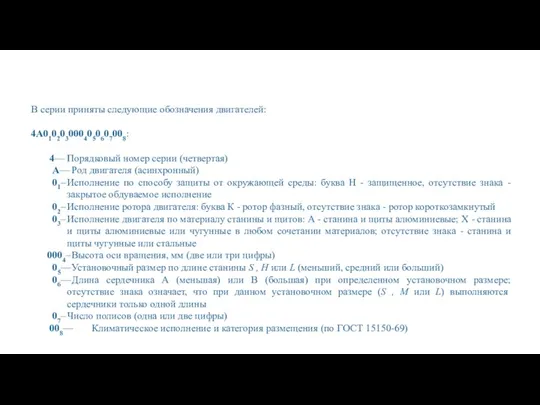
В серии приняты следующие обозначения двигателей:
4А0102030004050607008:
4— Порядковый номер серии (четвертая)
А— Род двигателя
В серии приняты следующие обозначения двигателей:
4А0102030004050607008:
4— Порядковый номер серии (четвертая)
А— Род двигателя
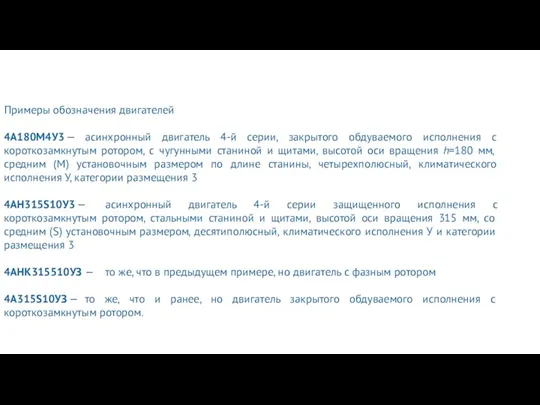
Примеры обозначения двигателей
4А180М4У3 — асинхронный двигатель 4-й серии, закрытого обдуваемого исполнения с
Примеры обозначения двигателей
4А180М4У3 — асинхронный двигатель 4-й серии, закрытого обдуваемого исполнения с

 Магнитные свойства горных пород и руд
Магнитные свойства горных пород и руд Масса, плотность, объем. 7 класс
Масса, плотность, объем. 7 класс Молекулярная физика
Молекулярная физика Компенсация реактивной мощности в системах электроснабжения промышленных предприятий
Компенсация реактивной мощности в системах электроснабжения промышленных предприятий Преобразователи электрических величин
Преобразователи электрических величин Определение давления тела на опору
Определение давления тела на опору : Слюсарно-механічні способи відновлення
: Слюсарно-механічні способи відновлення Тепловое излучение
Тепловое излучение Механические передачи. Ременные передачи
Механические передачи. Ременные передачи Разработка урока физики: Электризация тел
Разработка урока физики: Электризация тел Моделирование геомеханических процессов. Тема 11. Лекция № 16
Моделирование геомеханических процессов. Тема 11. Лекция № 16 Электронная презентация Два способа изменения внутренней энергии
Электронная презентация Два способа изменения внутренней энергии Масова частка речовини у розчині
Масова частка речовини у розчині Мультимедийная разработка внеклассного мероприятия Пионеры русской космонавтики
Мультимедийная разработка внеклассного мероприятия Пионеры русской космонавтики Режимы работы промышленных электрических сетей
Режимы работы промышленных электрических сетей Механические колебания
Механические колебания Презентация по физике Экология и космос
Презентация по физике Экология и космос Диодтыѕ атќаратын ќызметі
Диодтыѕ атќаратын ќызметі Проекты АЭС с ВВЭР Российские реакторы 3-го поколения
Проекты АЭС с ВВЭР Российские реакторы 3-го поколения Электризация тел. Электроскоп. Проводники и диэлектрики
Электризация тел. Электроскоп. Проводники и диэлектрики Подшипники скольжения
Подшипники скольжения Решение задач по физике (7 класс)
Решение задач по физике (7 класс)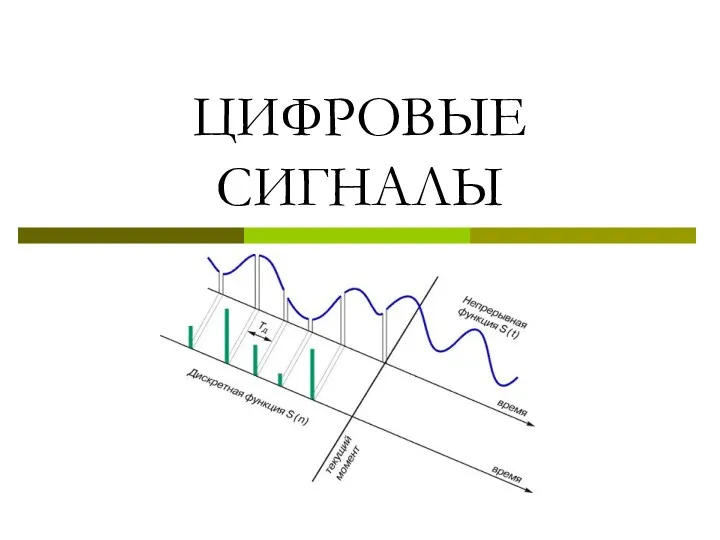 Цифровые сигналы
Цифровые сигналы Открытие электромагнитной индукции
Открытие электромагнитной индукции Измерение физических величин
Измерение физических величин Поверхностное натяжение. Термодинамика жидкостей
Поверхностное натяжение. Термодинамика жидкостей Своя игра по физике
Своя игра по физике Агрегатные состояния вещества. Плавление и отвердевание кристаллических тел
Агрегатные состояния вещества. Плавление и отвердевание кристаллических тел