- Электрические машины и микромашины устройств автоматики

Содержание
- 2. ЛИТЕРАТУРА Подлипенский В.С., Петренко В.П. Электромагнитные и электромашинные устройства автоматики. –Киев. –1987. Миловзоров В.П. Электромагнитные устройства
- 3. РАЗДЕЛ 2 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ. Лекция 8 ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА. 8.1 Общие
- 4. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА 8.1 Общие
- 5. Устройство машины постоянного тока
- 6. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА Основные элементы
- 7. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА Принцип действия
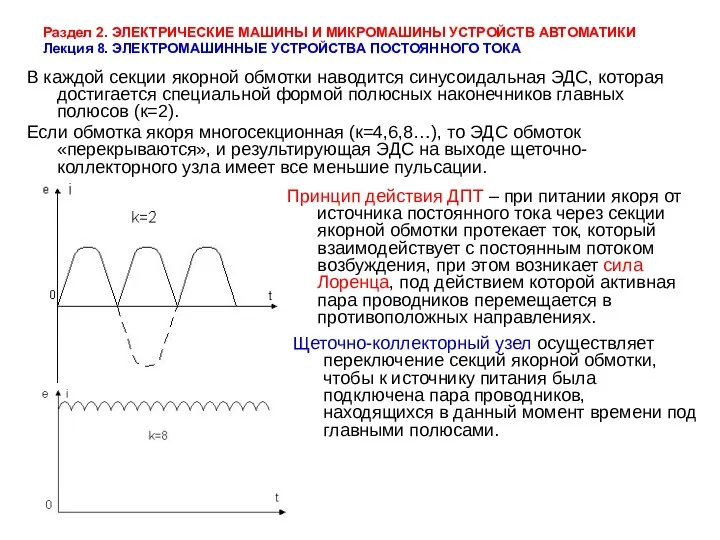
- 8. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА В каждой
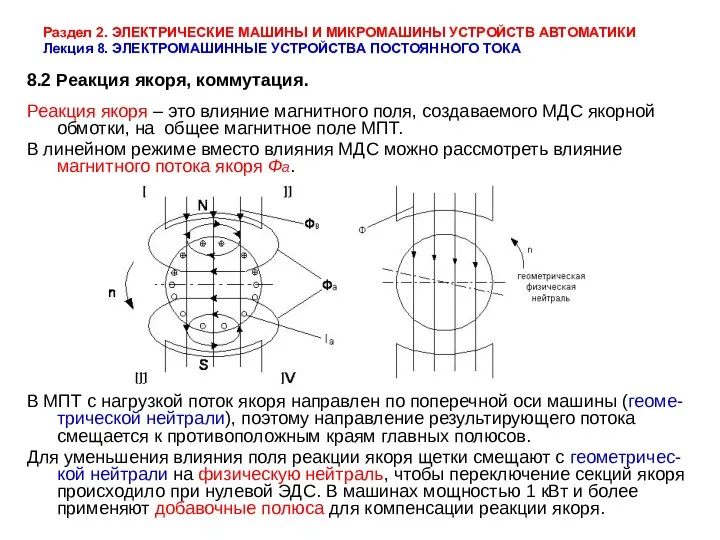
- 9. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА Реакция якоря
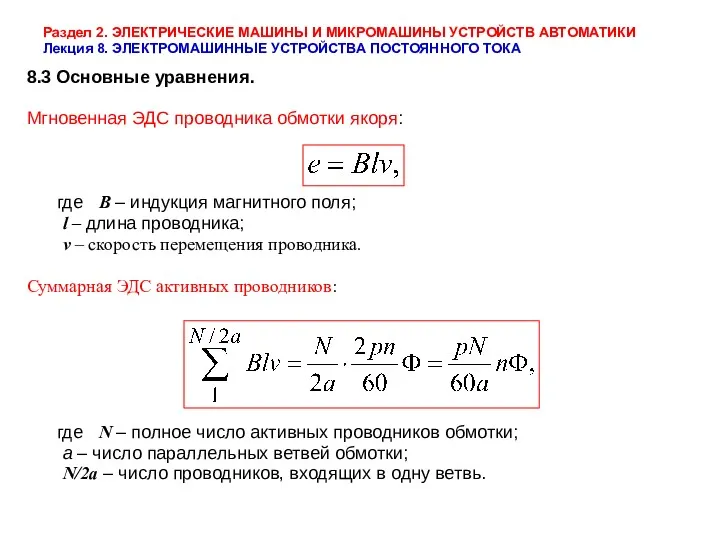
- 10. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА 8.3 Основные
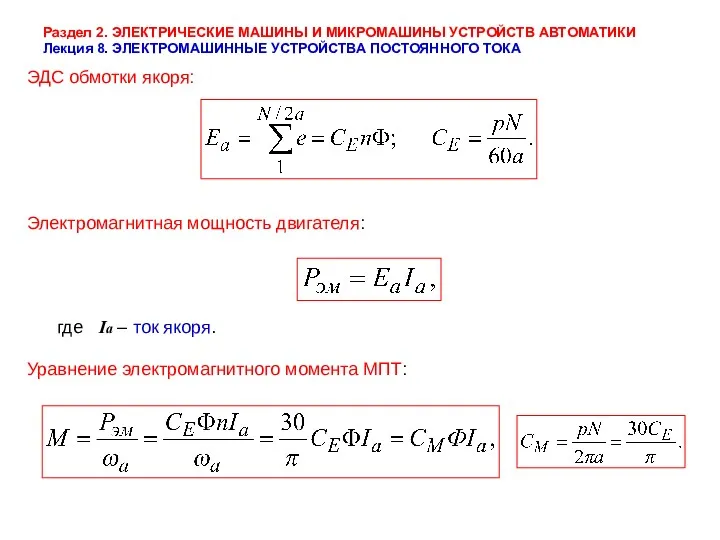
- 11. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА ЭДС обмотки
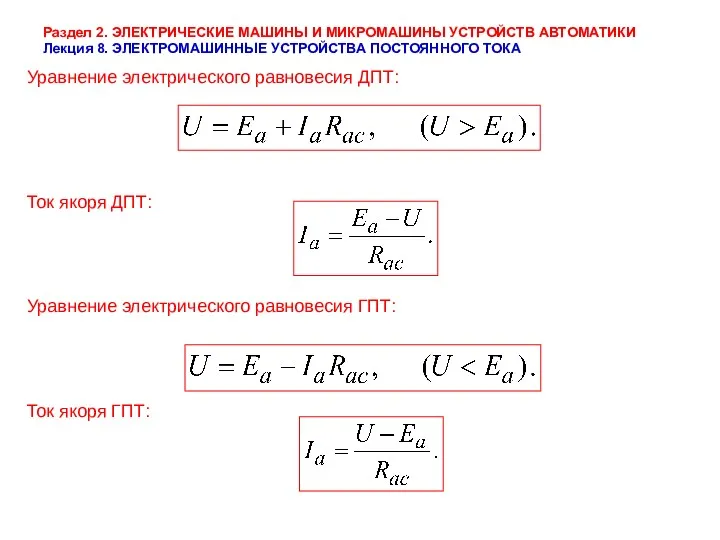
- 12. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА Уравнение электрического
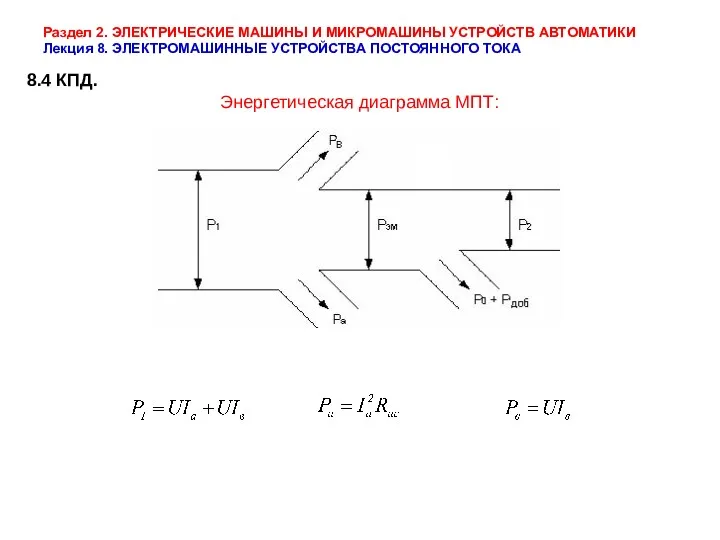
- 13. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА 8.4 КПД.
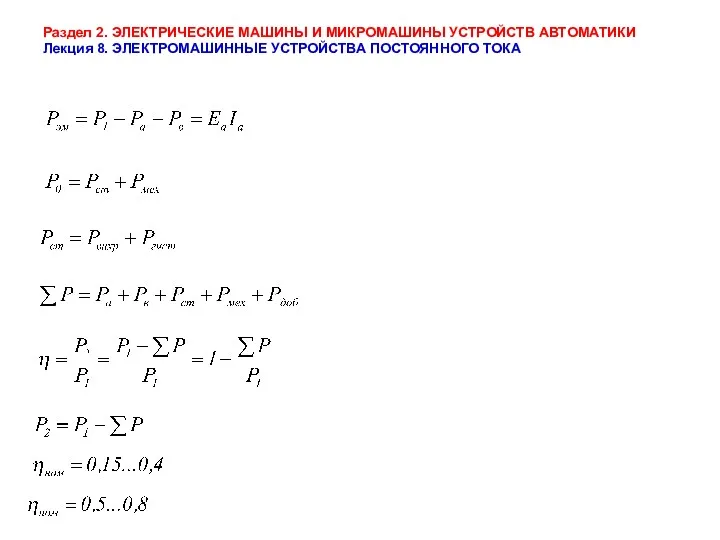
- 14. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА
- 15. Лекция 9 ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. 9.1 Способы возбуждения ДПТ. 9.2 Пуск и регулирование ДПТ. 9.3 Якорное
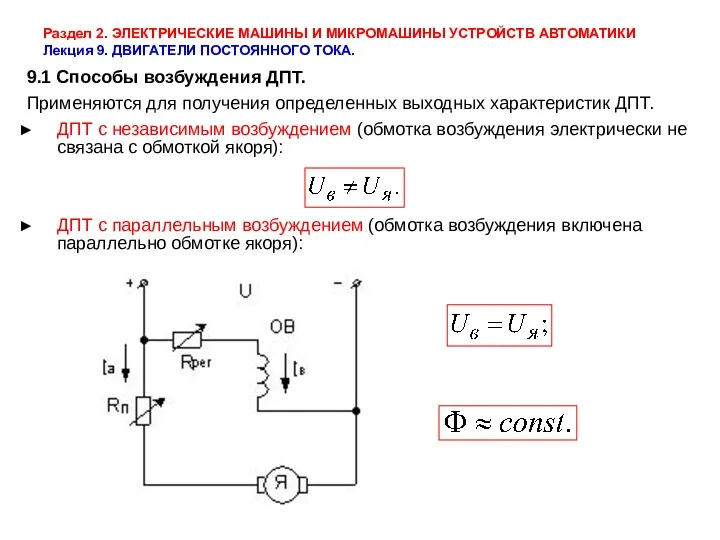
- 16. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. 9.1 Способы возбуждения
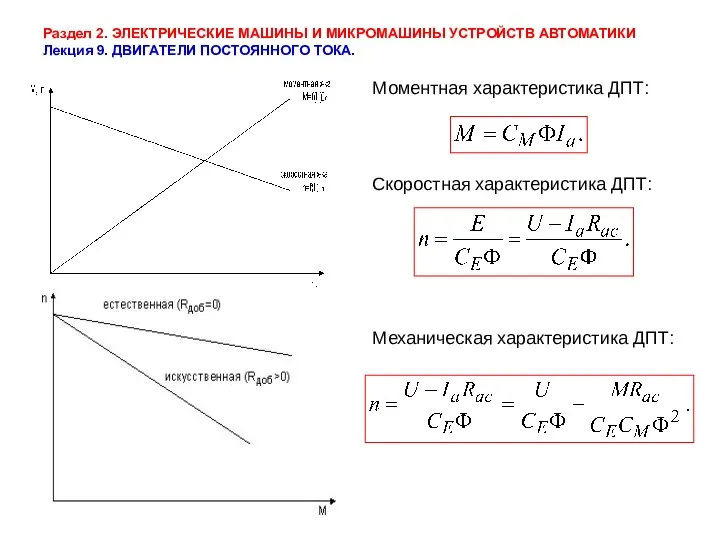
- 17. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Моментная характеристика ДПТ:
- 18. ДПТ с последовательным возбуждением (обмотка возбуждения включена последовательно с обмоткой якоря): Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И
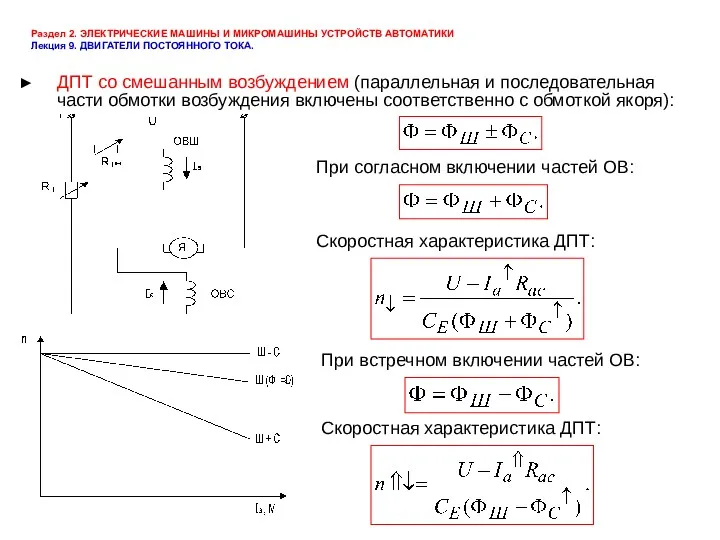
- 19. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. ДПТ со смешанным
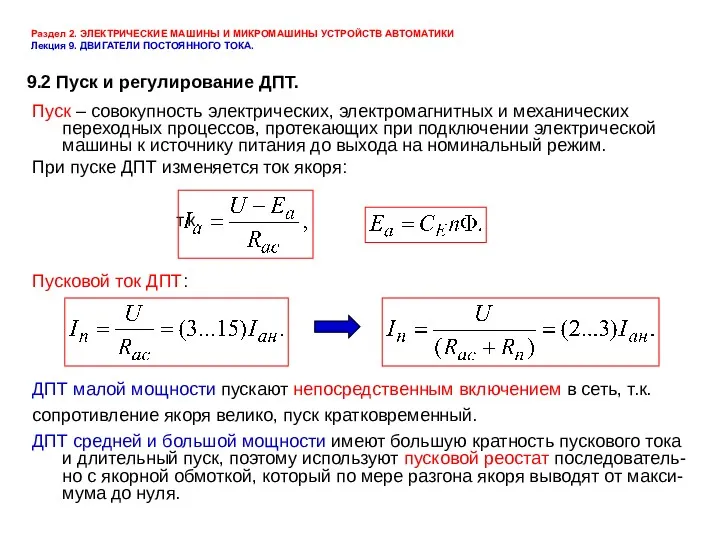
- 20. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. 9.2 Пуск и
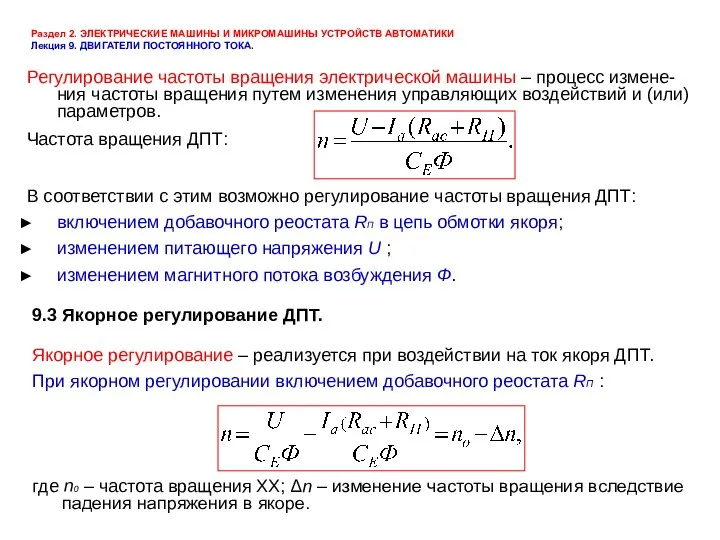
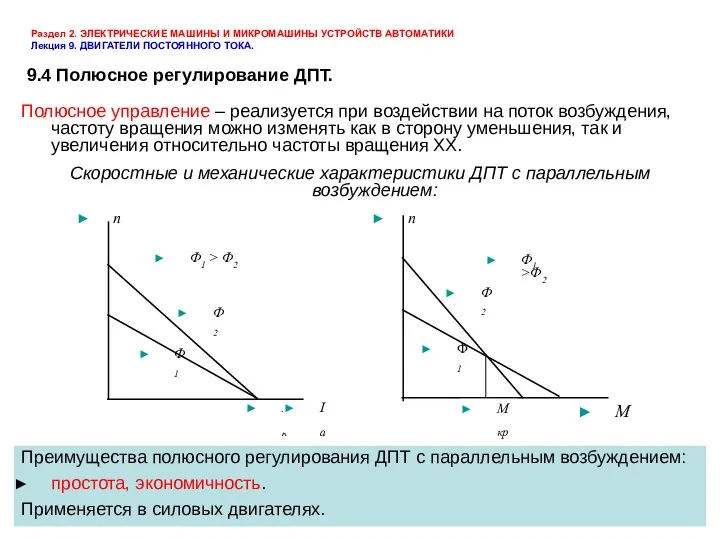
- 21. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Регулирование частоты вращения
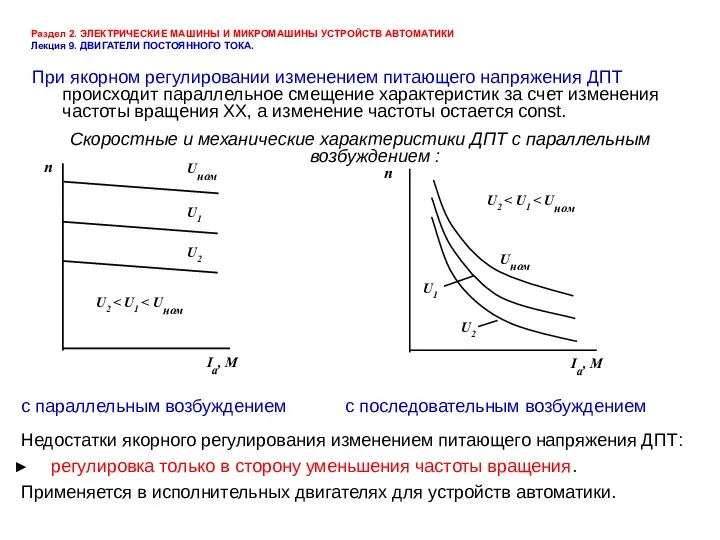
- 22. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. с параллельным возбуждением
- 23. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. с параллельным возбуждением
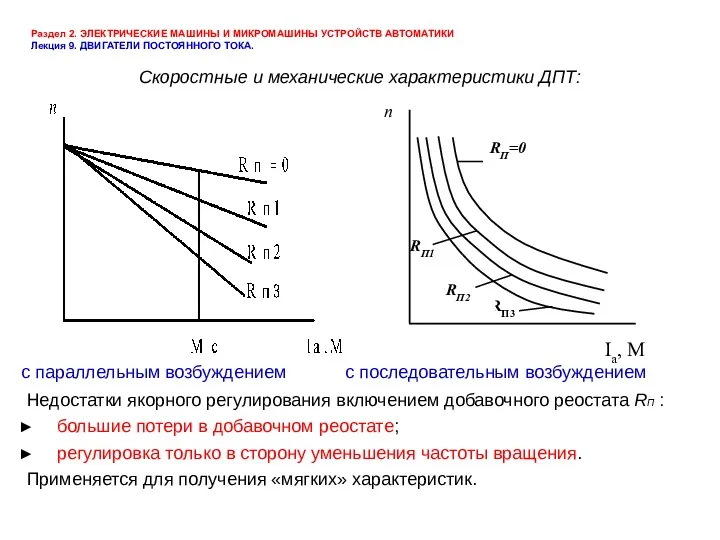
- 24. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Скоростные и механические
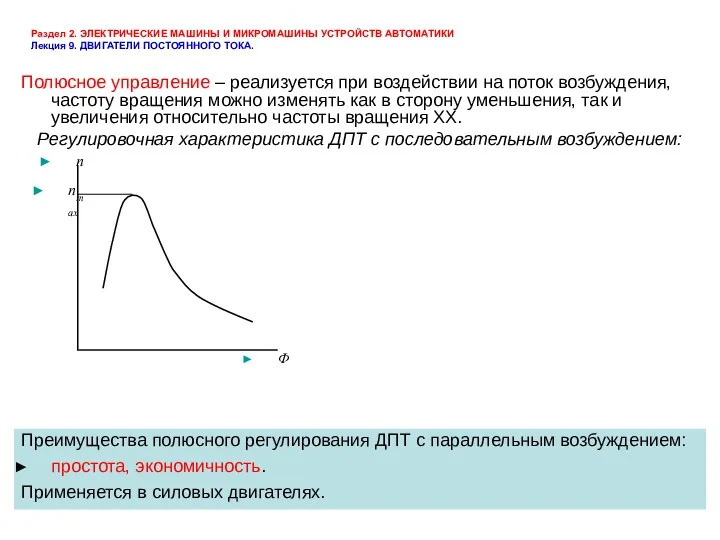
- 25. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Регулировочная характеристика ДПТ
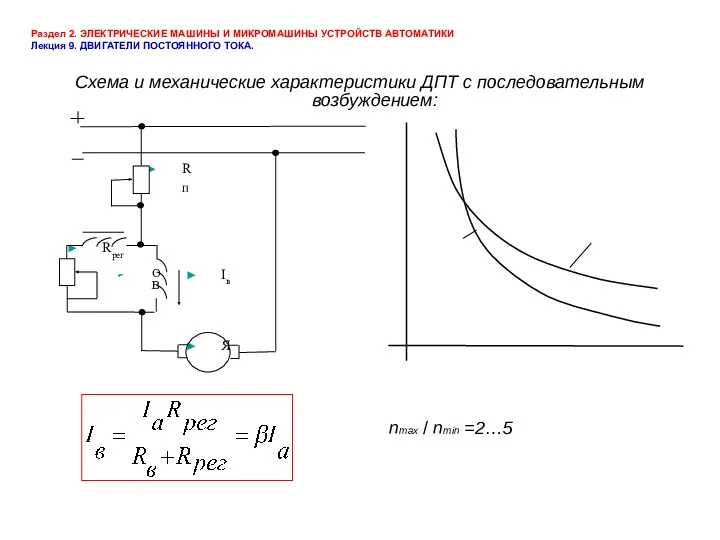
- 26. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА. Схема и механические
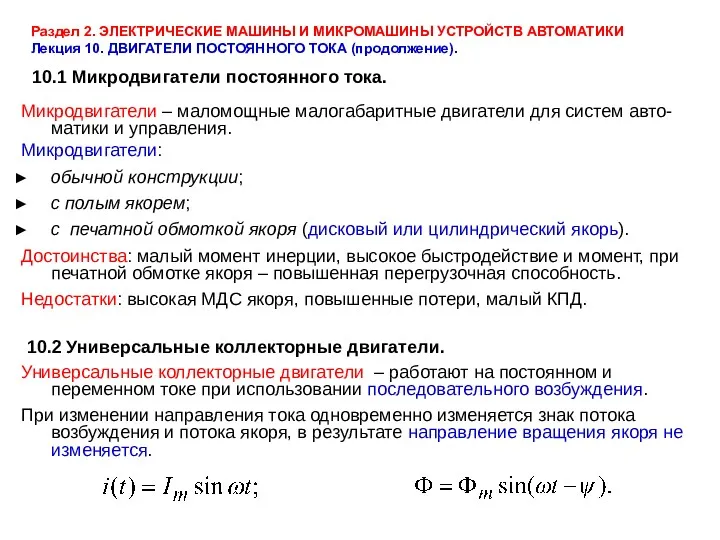
- 27. Лекция 10 ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). 10.1 Микродвигатели постоянного тока. 10.2 Универсальные коллекторные двигатели. 10.3 Исполнительные
- 28. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). 10.1 Микродвигатели
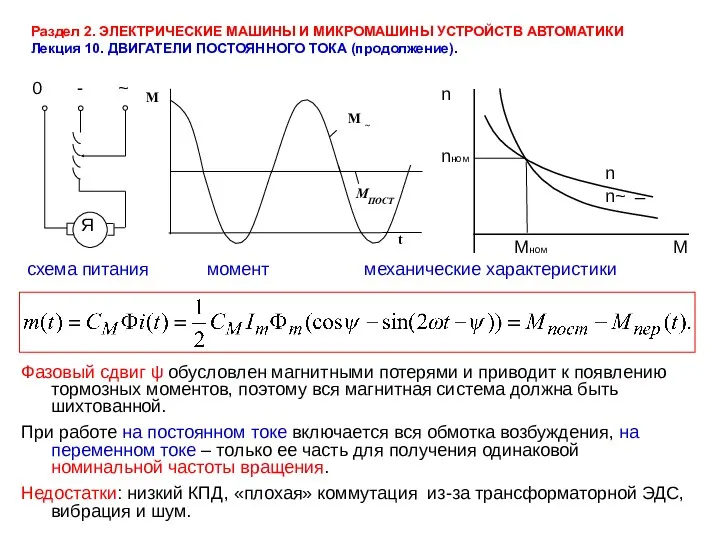
- 29. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Фазовый сдвиг
- 30. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). 10.3 Исполнительные
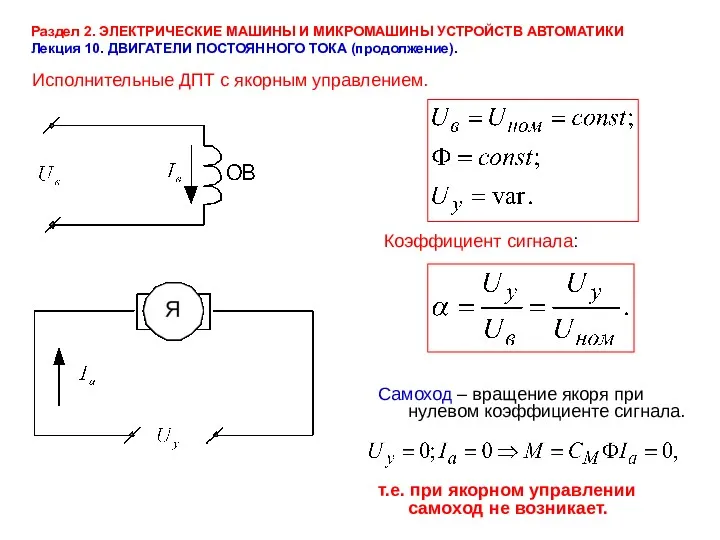
- 31. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Исполнительные ДПТ
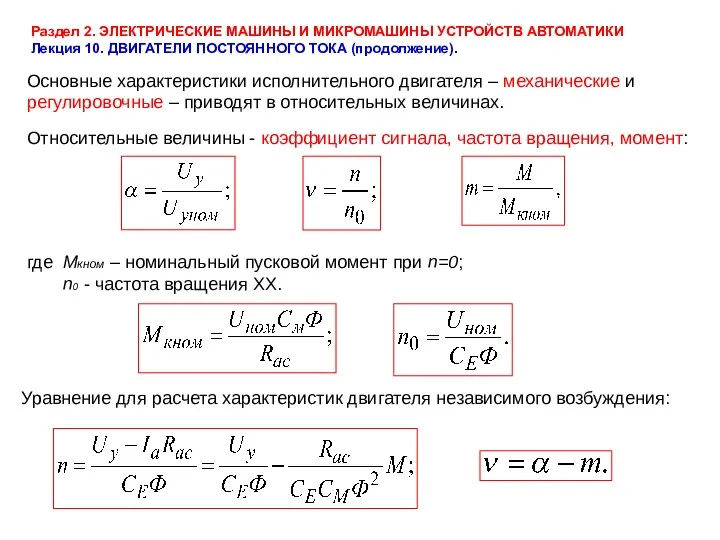
- 32. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Основные характеристики
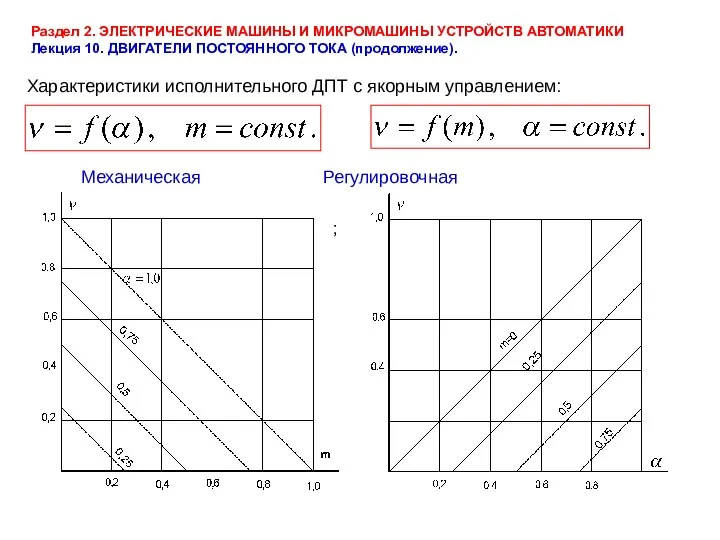
- 33. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Характеристики исполнительного
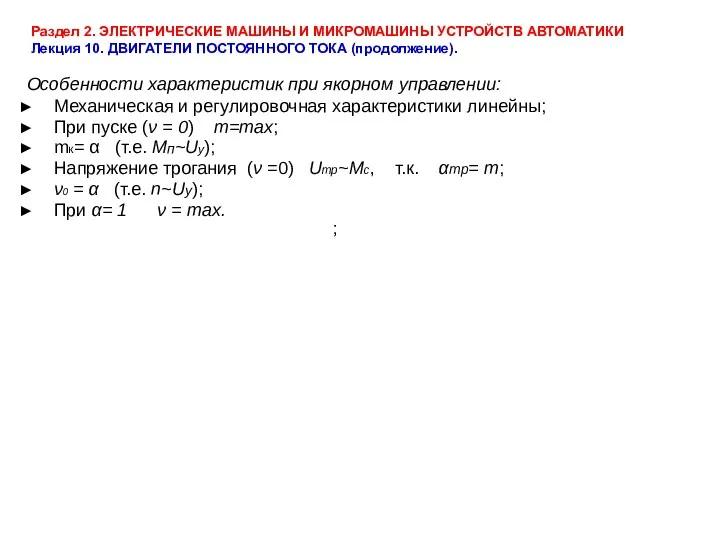
- 34. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА (продолжение). Особенности характеристик
- 35. Лекция 11 ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. 11.1 Общие сведения. 11.2 Магнитное поле машины переменного тока. 11.3
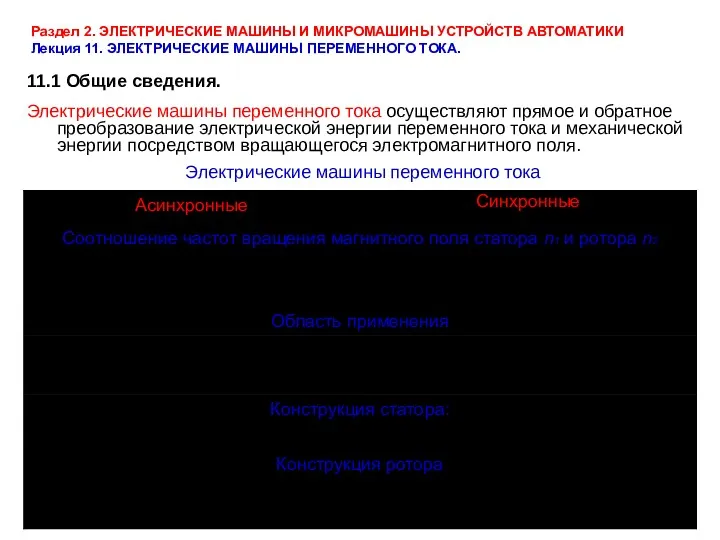
- 36. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. 11.1 Общие
- 37. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; Основные
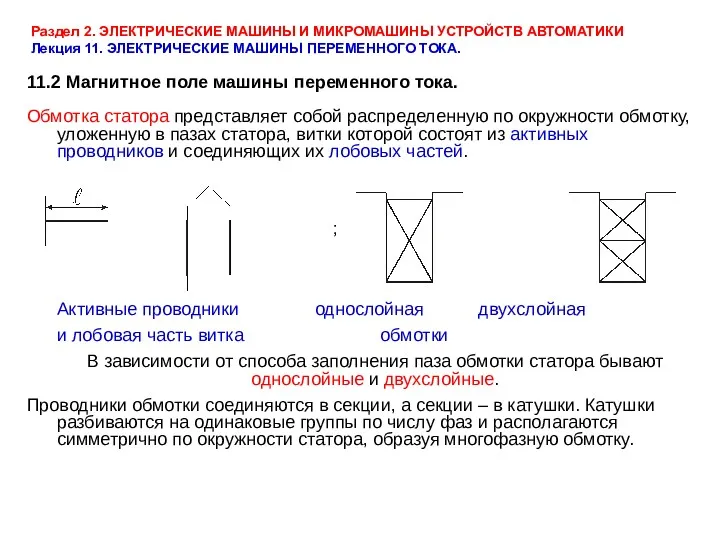
- 38. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; 11.2
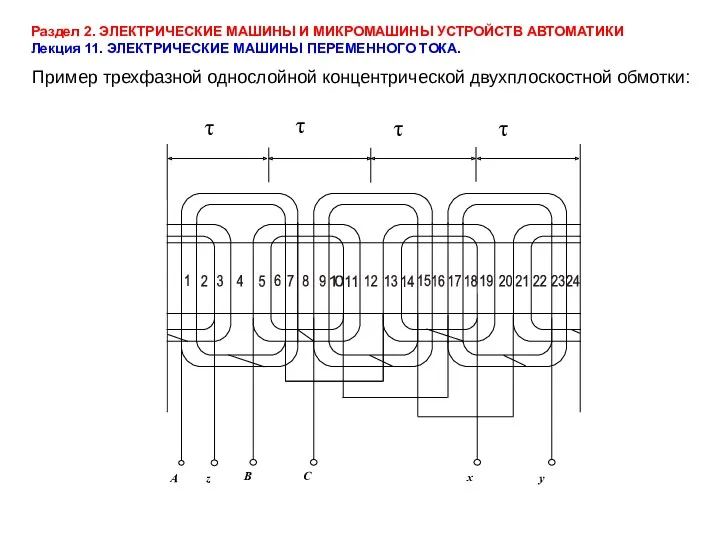
- 39. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; Пример
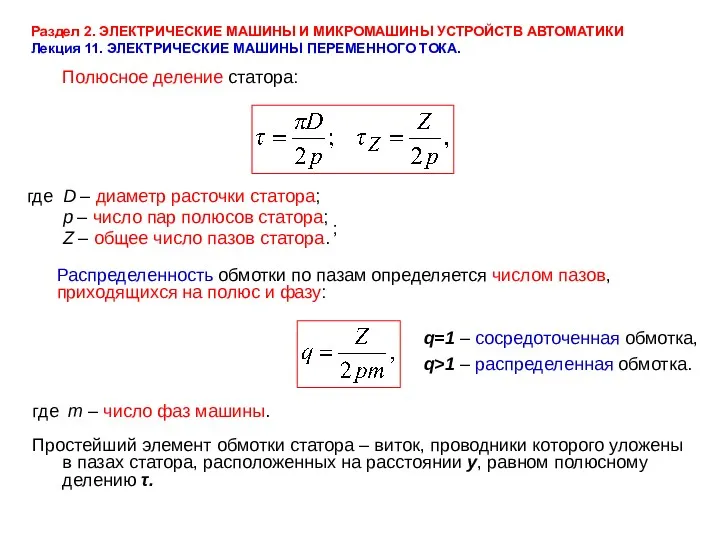
- 40. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; Полюсное
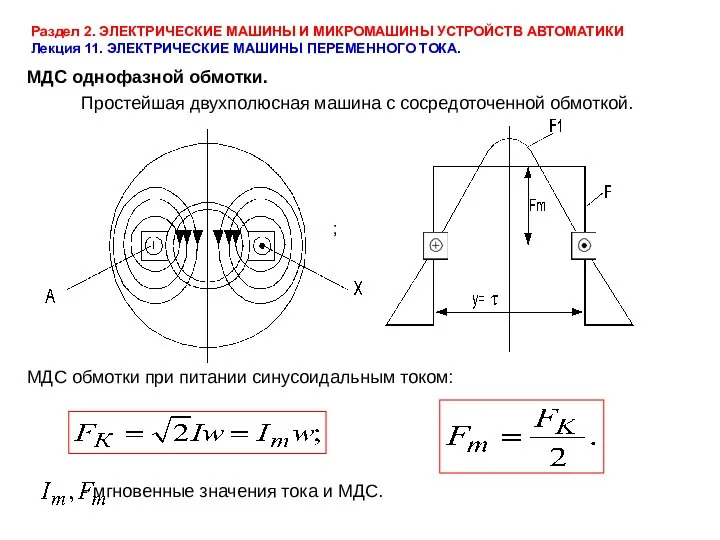
- 41. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; МДС
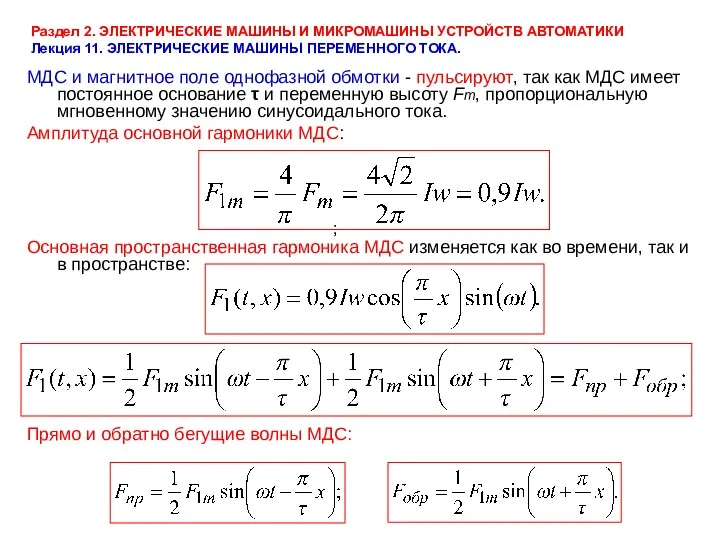
- 42. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; МДС
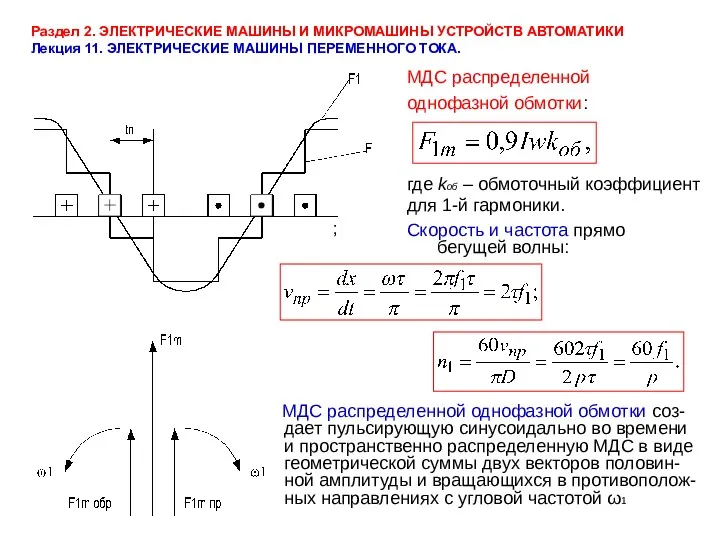
- 43. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА. ; МДС
- 44. Лекция 12 АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ. 12.1 Основные уравнения, схема замещения АД. 12.2 Энергетическая диаграмма и
- 45. Лекция 13 АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2). 13.1 Конструкции АД. 13.2 Пуск и устойчивость работы
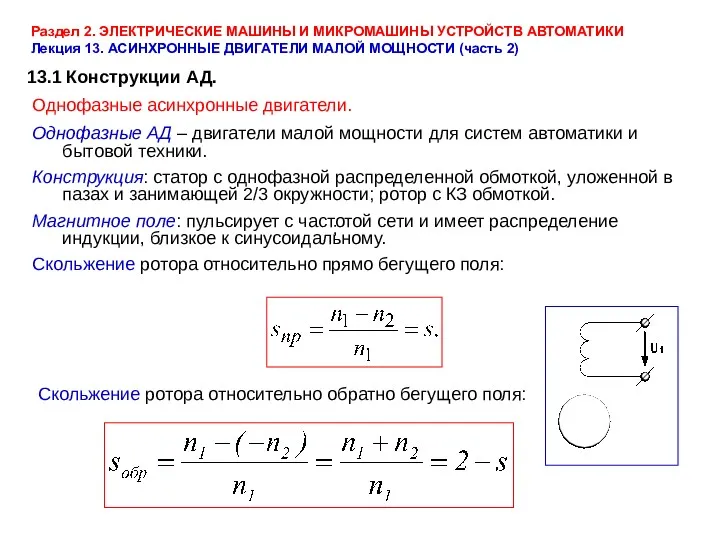
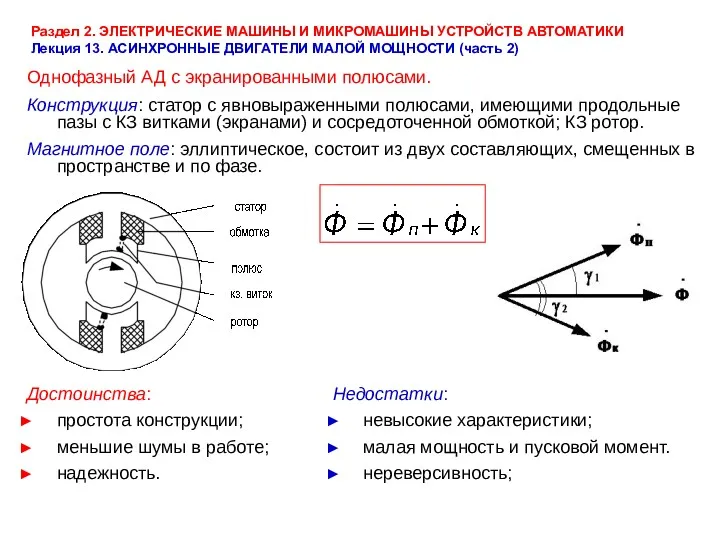
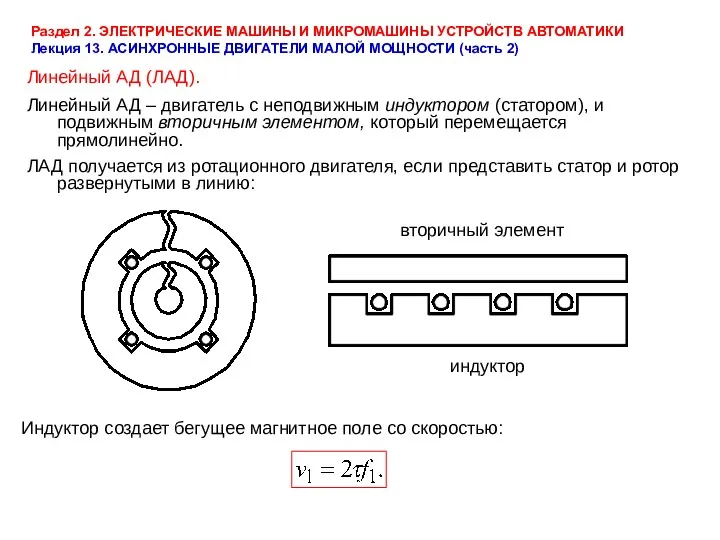
- 46. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 47. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
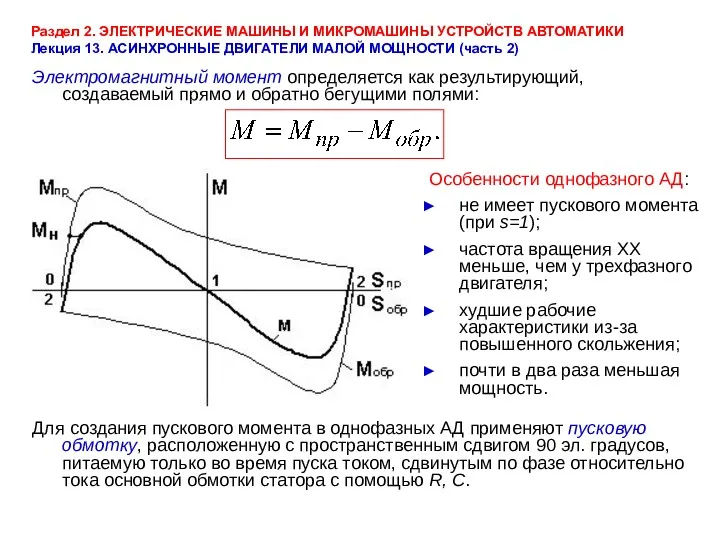
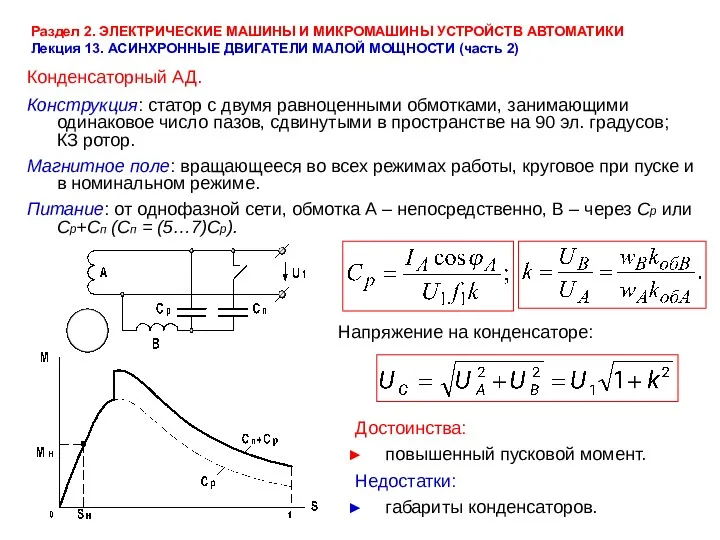
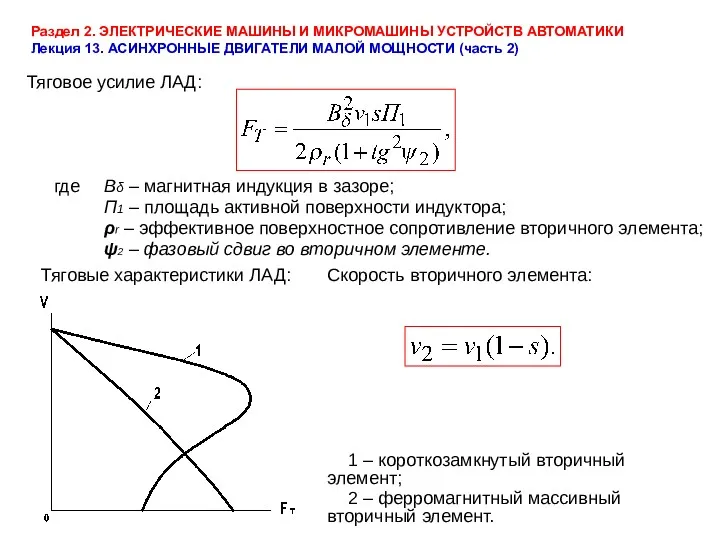
- 48. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 49. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
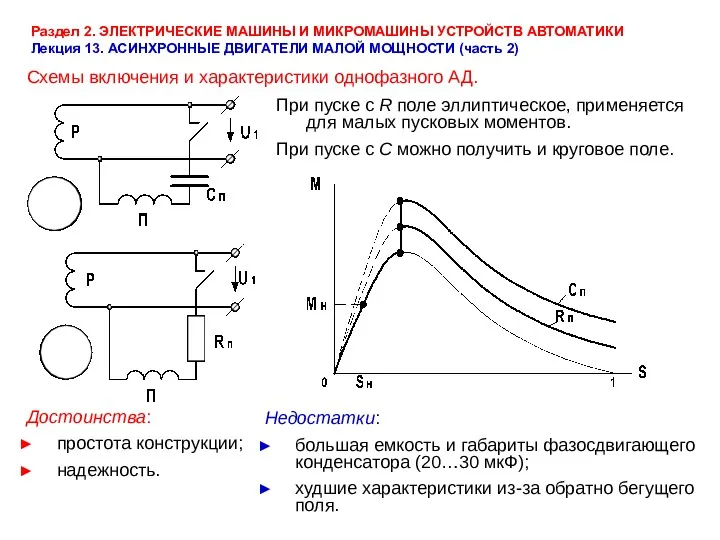
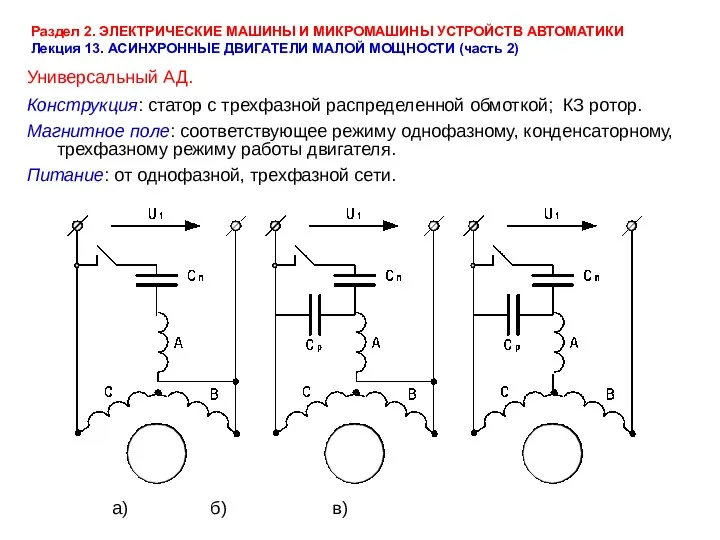
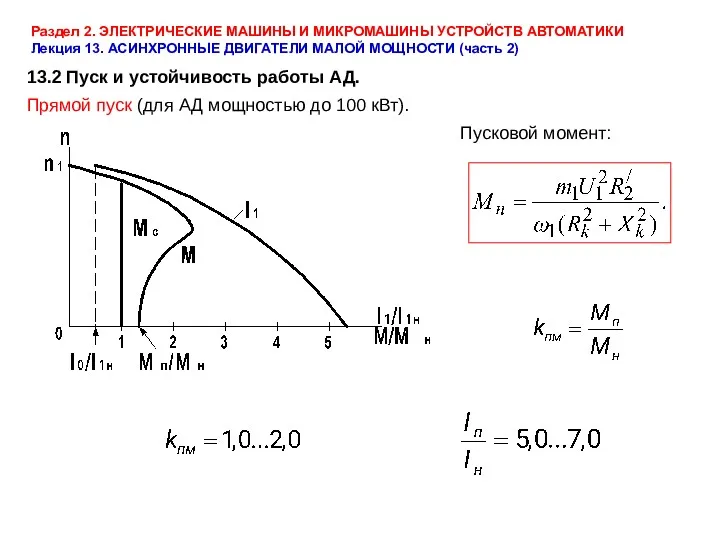
- 50. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 51. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
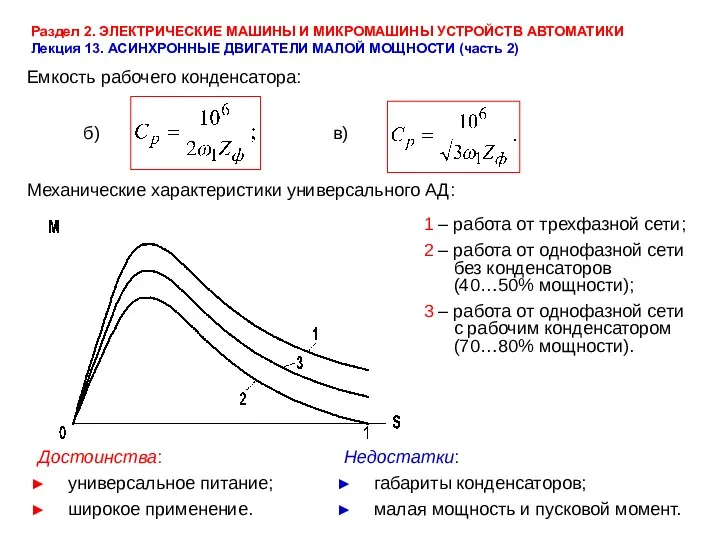
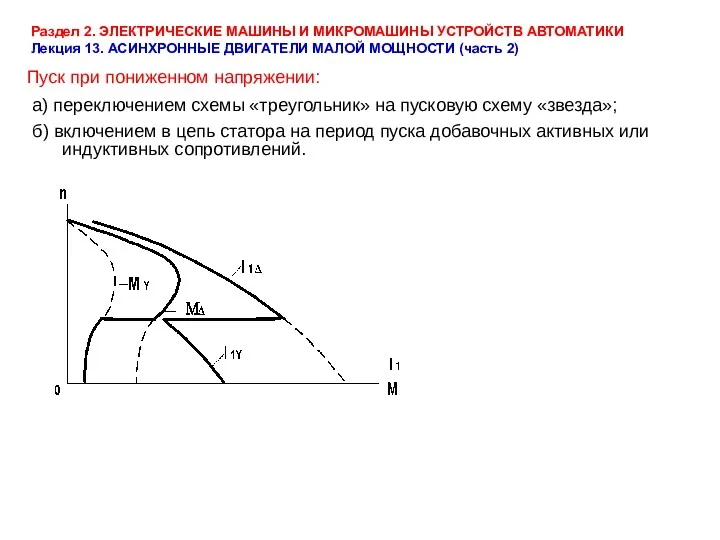
- 52. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 53. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 54. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 55. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 56. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2)
- 57. Лекция 14 ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА. АСИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ. 14.1 Общие сведения и конструкция. 14.2 Способы регулирования.
- 58. Лекция 15 СЕЛЬСИНЫ. 15.1 Общие сведения и конструкция. 15.2 Индикаторный режим сельсинов. 14.3 Трансформаторный режим сельсинов.
- 59. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ 15.1 Общие сведения и конструкция.
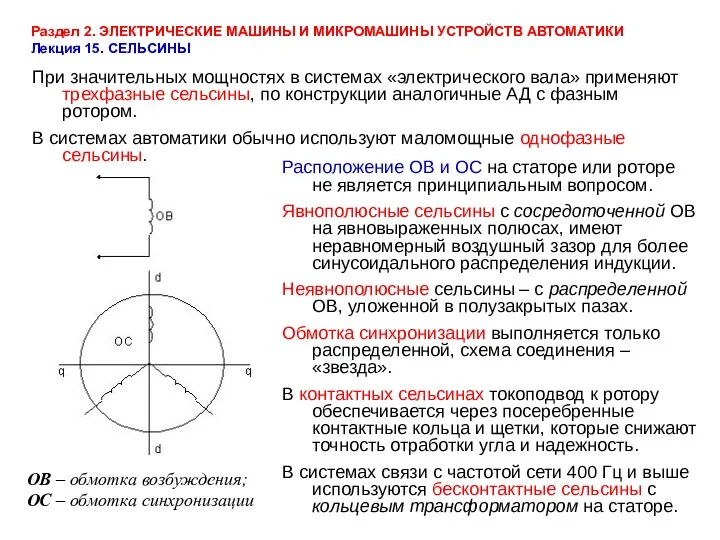
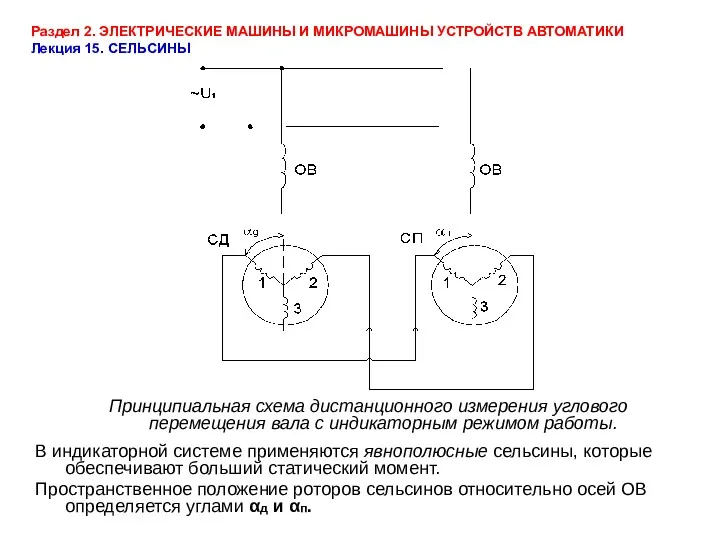
- 60. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ При значительных мощностях в системах
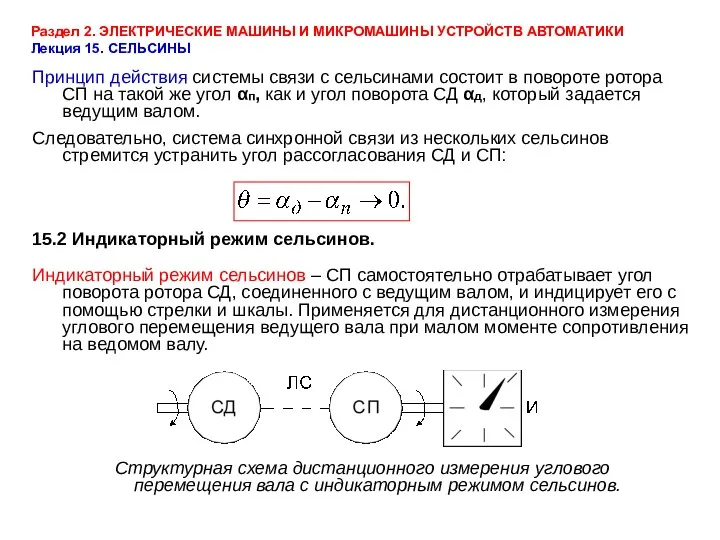
- 61. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Принцип действия системы связи с
- 62. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Принципиальная схема дистанционного измерения углового
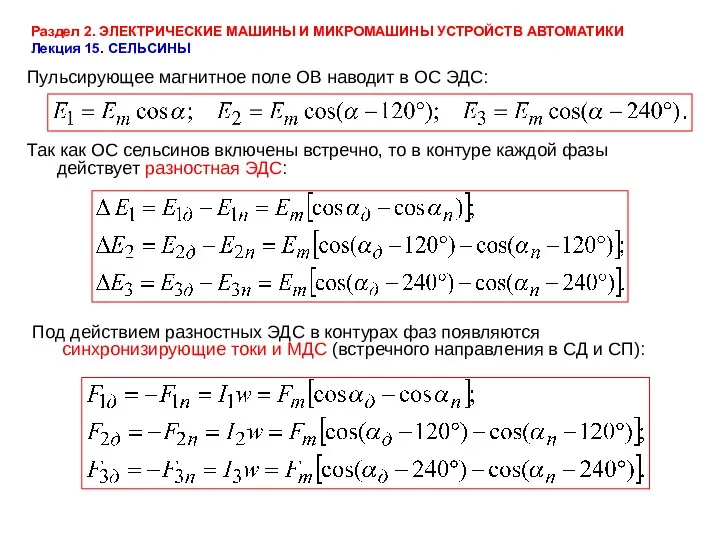
- 63. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Пульсирующее магнитное поле ОВ наводит
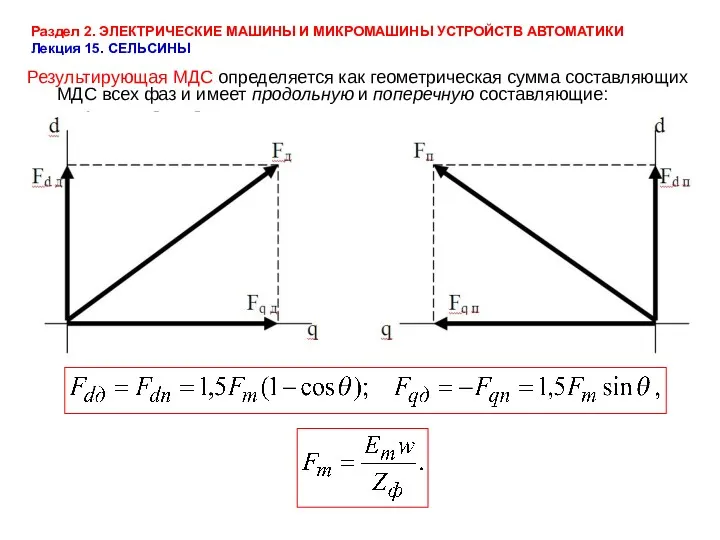
- 64. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Результирующая МДС определяется как геометрическая
- 65. Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 15. СЕЛЬСИНЫ Взаимодействие потока, создаваемого поперечной составляющей
- 67. Скачать презентацию
ЛИТЕРАТУРА
Подлипенский В.С., Петренко В.П. Электромагнитные и электромашинные устройства автоматики. –Киев. –1987.
Миловзоров
ЛИТЕРАТУРА
Подлипенский В.С., Петренко В.П. Электромагнитные и электромашинные устройства автоматики. –Киев. –1987.
Миловзоров
РАЗДЕЛ 2
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ
УСТРОЙСТВ АВТОМАТИКИ.
Лекция 8
ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА.
8.1
РАЗДЕЛ 2
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ
УСТРОЙСТВ АВТОМАТИКИ.
Лекция 8
ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА ПОСТОЯННОГО ТОКА.
8.1
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
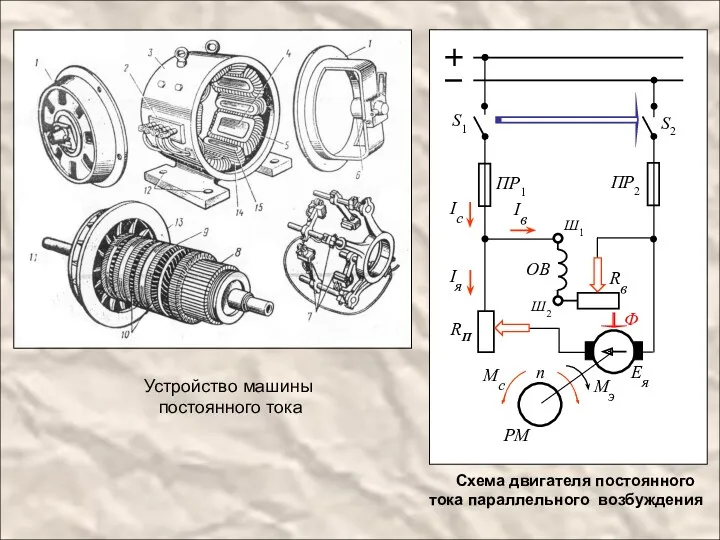
Устройство машины
постоянного тока
Устройство машины
постоянного тока

Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА

Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 8. ЭЛЕКТРОМАШИННЫЕ УСТРОЙСТВА
Лекция 9
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
9.1 Способы возбуждения ДПТ.
9.2 Пуск и регулирование
Лекция 9
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
9.1 Способы возбуждения ДПТ.
9.2 Пуск и регулирование
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
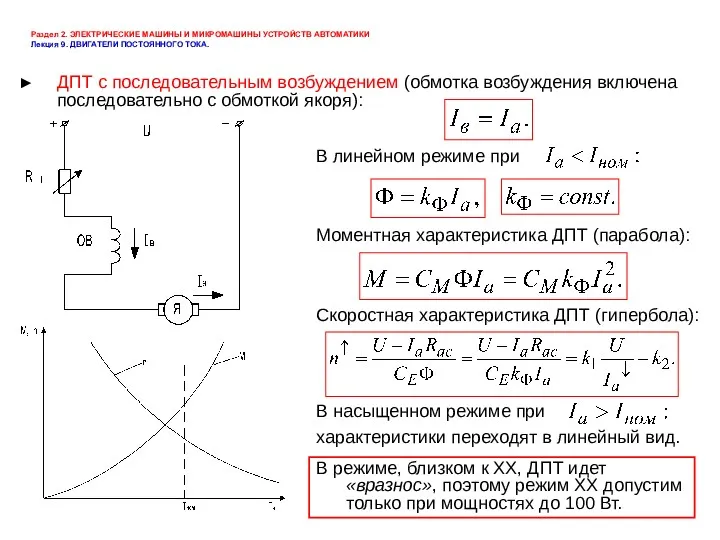
ДПТ с последовательным возбуждением (обмотка возбуждения включена последовательно с обмоткой якоря):
Раздел
ДПТ с последовательным возбуждением (обмотка возбуждения включена последовательно с обмоткой якоря):
Раздел
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 9. ДВИГАТЕЛИ ПОСТОЯННОГО
Лекция 10
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
(продолжение).
10.1 Микродвигатели постоянного тока.
10.2 Универсальные коллекторные
Лекция 10
ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
(продолжение).
10.1 Микродвигатели постоянного тока.
10.2 Универсальные коллекторные
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 10. ДВИГАТЕЛИ ПОСТОЯННОГО
Лекция 11
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
11.1 Общие сведения.
11.2 Магнитное поле машины
Лекция 11
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА.
11.1 Общие сведения.
11.2 Магнитное поле машины
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ

Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 11. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Лекция 12
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ.
12.1 Основные уравнения, схема замещения АД.
12.2
Лекция 12
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ.
12.1 Основные уравнения, схема замещения АД.
12.2
Лекция 13
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2).
13.1 Конструкции АД.
13.2 Пуск
Лекция 13
АСИНХРОННЫЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ (часть 2).
13.1 Конструкции АД.
13.2 Пуск
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ Лекция 13. АСИНХРОННЫЕ ДВИГАТЕЛИ
Лекция 14
ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА.
АСИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ.
14.1 Общие сведения и конструкция.
14.2
Лекция 14
ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА.
АСИНХРОННЫЕ ТАХОГЕНЕРАТОРЫ.
14.1 Общие сведения и конструкция.
14.2
Лекция 15
СЕЛЬСИНЫ.
15.1 Общие сведения и конструкция.
15.2 Индикаторный режим сельсинов.
14.3 Трансформаторный
Лекция 15
СЕЛЬСИНЫ.
15.1 Общие сведения и конструкция.
15.2 Индикаторный режим сельсинов.
14.3 Трансформаторный

Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
15.1 Общие
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
15.1 Общие
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
При значительных
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
При значительных
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Принцип действия
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Принцип действия
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Принципиальная схема
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Принципиальная схема
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Пульсирующее магнитное
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Пульсирующее магнитное
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Результирующая МДС
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Результирующая МДС
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Взаимодействие потока,
Раздел 2. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ И МИКРОМАШИНЫ УСТРОЙСТВ АВТОМАТИКИ
Лекция 15. СЕЛЬСИНЫ
Взаимодействие потока,
 Современные тепловые двигатели
Современные тепловые двигатели Constant Jerk Trajectory Generator
Constant Jerk Trajectory Generator Мастер класс по использованию сингапурской системы для учителей физики Татарстан
Мастер класс по использованию сингапурской системы для учителей физики Татарстан Механізм газорозподілу. (Лекція 3.2)
Механізм газорозподілу. (Лекція 3.2) Геометрическа оптика
Геометрическа оптика Легированные стали
Легированные стали Силы в природе (7 класс)
Силы в природе (7 класс) Дисперсия. Важнейшие выводы теории Максвелла
Дисперсия. Важнейшие выводы теории Максвелла Урок по физике Сила трения
Урок по физике Сила трения Практические навыки матроса. Основы МППСС. Лекция 3
Практические навыки матроса. Основы МППСС. Лекция 3 Výpočet tepla
Výpočet tepla Нестабильные обороты на холостом ходу при включённой нагрузке
Нестабильные обороты на холостом ходу при включённой нагрузке Воздухоплавание. Первый воздушный полёт
Воздухоплавание. Первый воздушный полёт Потенциальная и кинетическая энергия
Потенциальная и кинетическая энергия Агрегатные состояния веществ
Агрегатные состояния веществ Коммерческий транспорт Groupe PSA - Opel Vivaro
Коммерческий транспорт Groupe PSA - Opel Vivaro Хромов_В_И_ПМ-101_радиация
Хромов_В_И_ПМ-101_радиация Электр станцияларының электр жабдықтары: аккумуляторлық, конденсаторлық қондырғылар
Электр станцияларының электр жабдықтары: аккумуляторлық, конденсаторлық қондырғылар Тепловое действие тока. Закон Джоуля–Ленца
Тепловое действие тока. Закон Джоуля–Ленца Презентация к уроку Что изучает физика. Физические явления (7 класс)
Презентация к уроку Что изучает физика. Физические явления (7 класс) презентация импульс тела закон сохранения импульса
презентация импульс тела закон сохранения импульса Урок физики в 7 классе на тему: Агрегатные состояния вещества
Урок физики в 7 классе на тему: Агрегатные состояния вещества Состав ядра. Ядерные силы
Состав ядра. Ядерные силы Нагревание воздуха и его температура
Нагревание воздуха и его температура Режим промывки насоса
Режим промывки насоса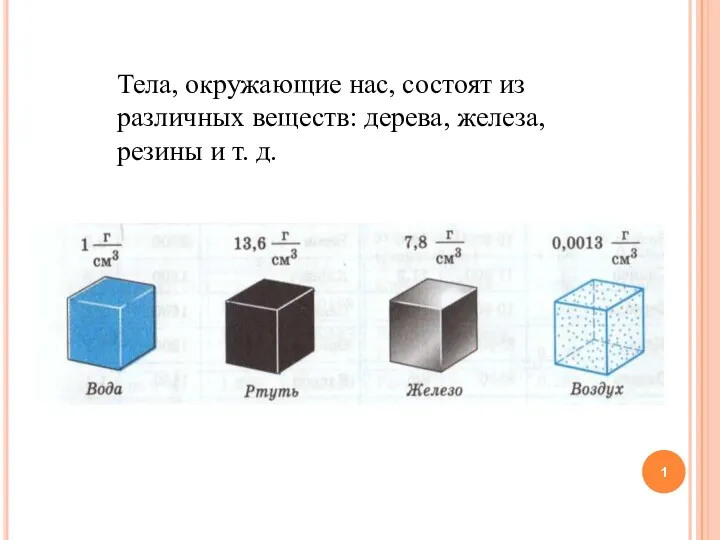 Понятие плотности тела (вещества)
Понятие плотности тела (вещества)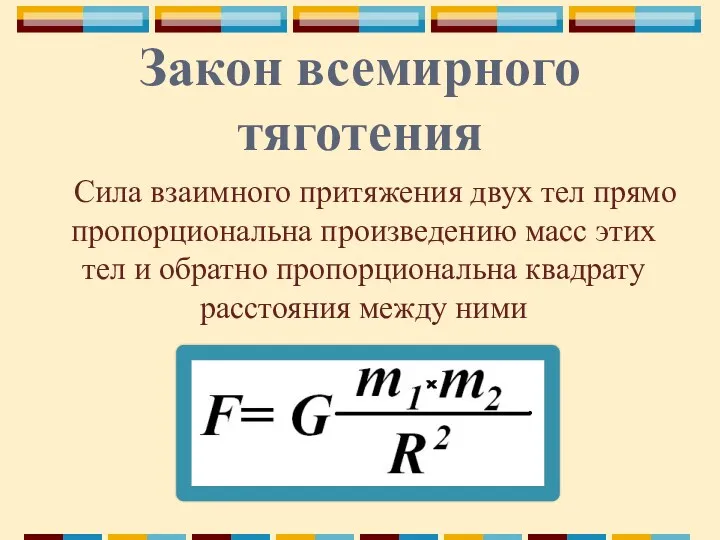 Презентация Вес тела
Презентация Вес тела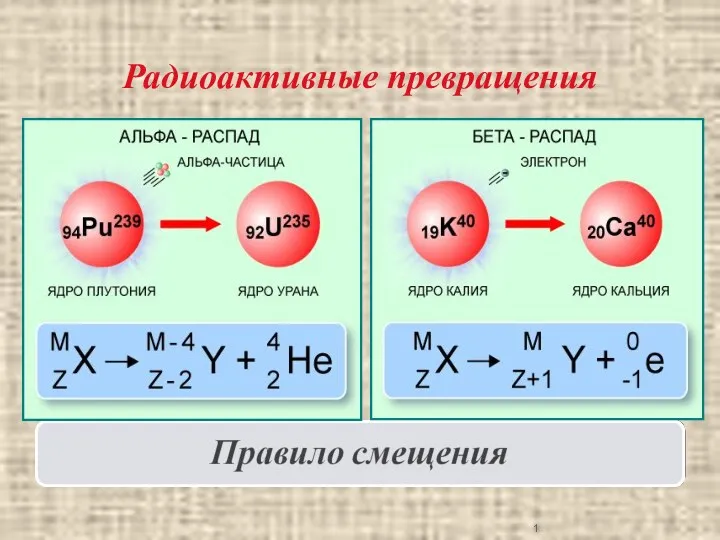 ИЗОТОПЫ
ИЗОТОПЫ