- Электрические машины постоянного тока

Содержание
- 2. Электрические машины постоянного тока по своему назначению делятся на генераторы, преобразующие механическую энергию в электрическую при
- 3. 1 – подшипниковый щит; 2 – подшипник; 3 – вентилятор; 4 – якорь; 5 – коллектор;
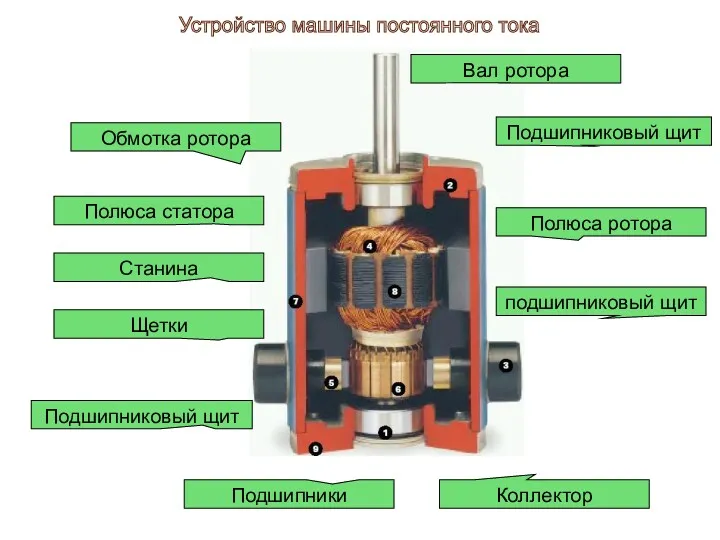
- 4. Обмотка ротора Полюса статора Станина Щетки Подшипниковый щит Подшипники Вал ротора Подшипниковый щит Полюса ротора подшипниковый
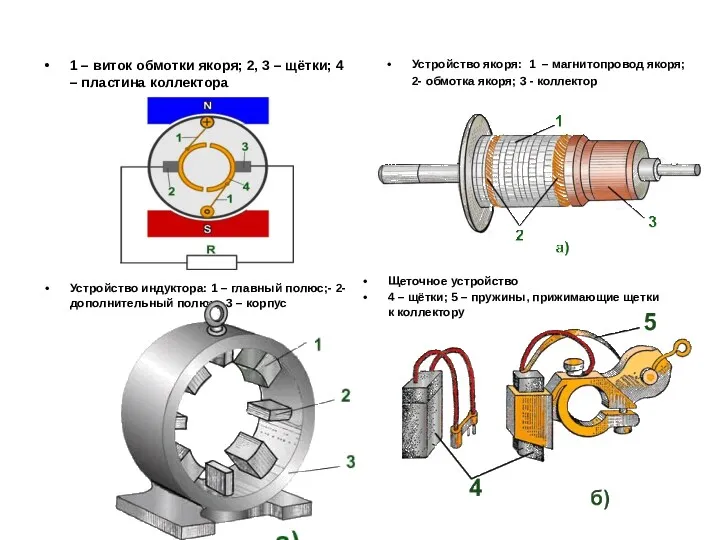
- 5. Устройство якоря: 1 – магнитопровод якоря; 2- обмотка якоря; 3 - коллектор Устройство индуктора: 1 –
- 6. 1 – главный полюс; 2 – дополнительный полюс; 3 - корпус Устройство индуктора (статора) машины постоянного
- 7. 1 – сердечник якоря; 2 – обмотка якоря; 3 - коллектор Устройство якоря машины постоянного тока
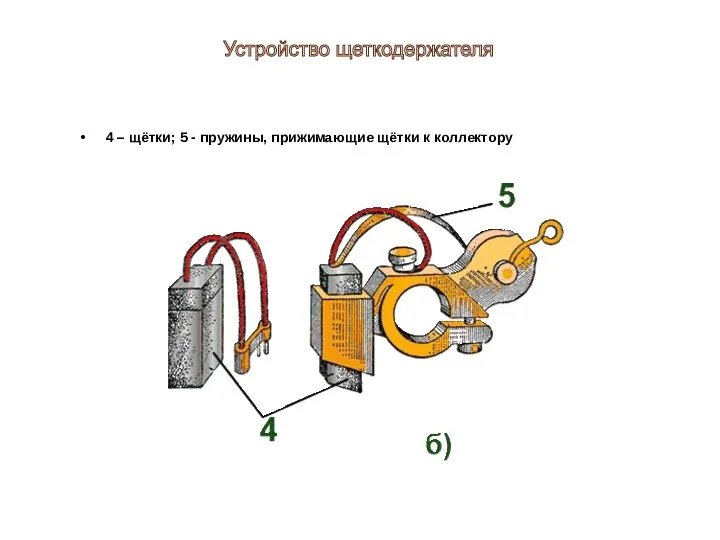
- 8. 4 – щётки; 5 - пружины, прижимающие щётки к коллектору Устройство щеткодержателя
- 9. Реакция якоря – влияние магнитного потока якоря на основной магнитный поток. Рис.а – основной магнитный поток;
- 10. Коммутация МПТ – явления, вызванные изменением направления тока в проводниках обмотки якоря при переходе из одной
- 11. Направление тока в коммутируемой секции обмотки якоря: а) до коммутации; б) при коммутации; в) по окончании
- 12. Двигатель постоянного тока
- 13. В зависимости от наличия обмотки возбуждения (ОВ) и схемы ее подключения относительно обмотки якоря (ОЯ) получаются
- 14. Источник Uс Е РМ Uв Iв IвWв Фв Фр ЭМИ ЭМС Мвр n Мпр Iя IяWя
- 15. Принцип действия ДПТ. От источника постоянного напряжения U в рамку подается ток I. По правилу левой
- 16. ЭДС якоря индуцируется в обмотке якоря магнитным потоком возбуждения и измеряется между разнополярными щетками. Е =
- 17. Направление действия силы на рамку с током в магнитном поле определяется правилом левой руки Простейший двигатель
- 18. Противо-ЭДС якоря возникает в ОЯ и направлена навстречу току якоря. Ток якоря Сопротивление якоря iн Е
- 19. U – напряжение сети; Ф – магнитный поток; М – вращающий момент; Iя – ток якоря;
- 20. В момент пуска якорь двигателя неподвижен (n = 0), поэтому отсутствует противоЭДС (E = CeФn =
- 21. Существуют три способа пуска: 1) Прямой пуск применяют только для маломощных двигателей, у которых Iя.п не
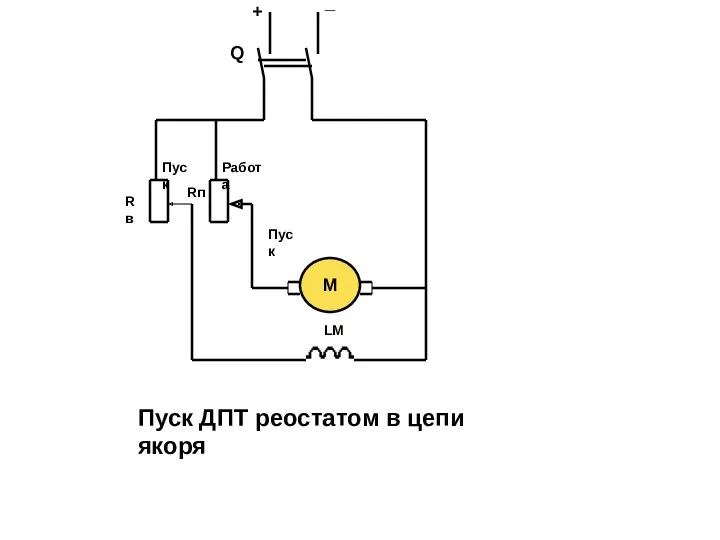
- 22. М Q + _ Rв Пуск Работа Пуск LM Пуск ДПТ реостатом в цепи якоря Rп
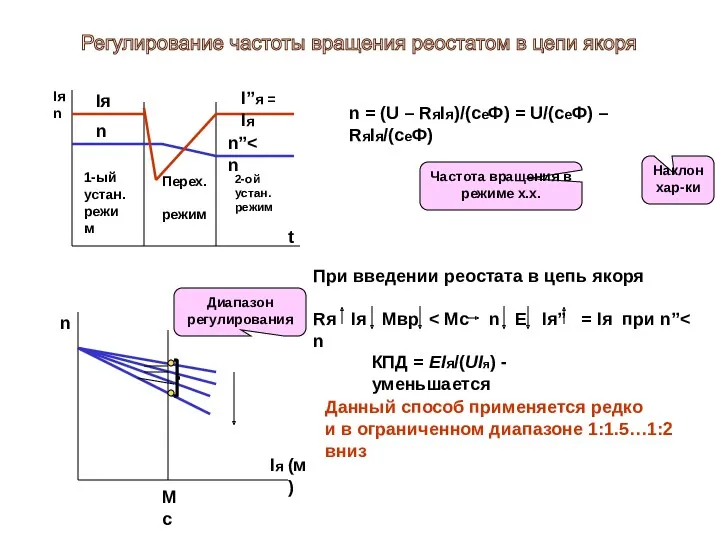
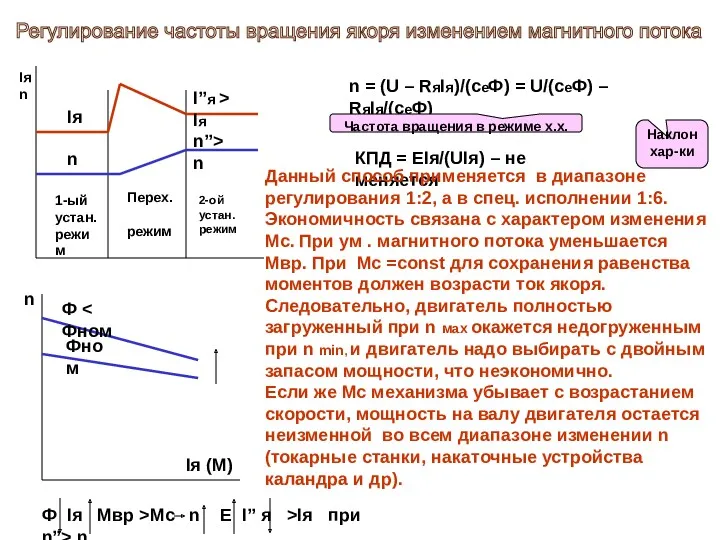
- 23. 1. Изменением напряжения на якоре 2. Изменением сопротивления якоря: введением реостата в цепь якоря. Влияет только
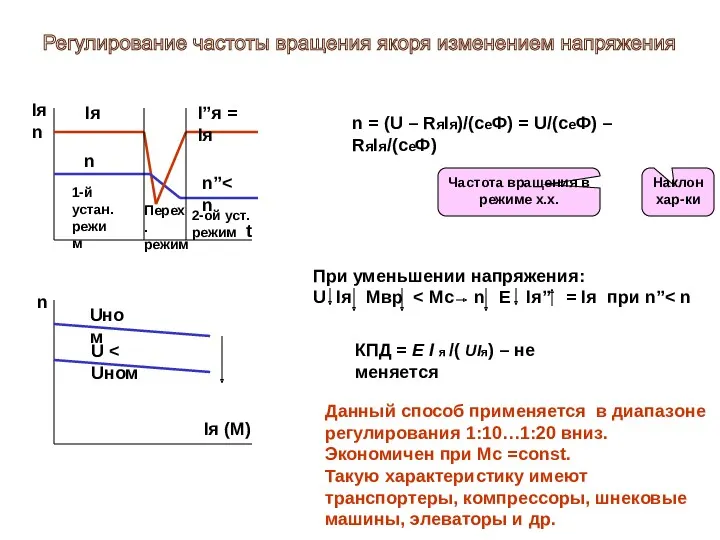
- 24. n = (U – RяIя)/(ceФ) = U/(ceФ) – RяIя/(ceФ) Iя n t Iя I”я = Iя
- 25. Iя n 1-ый устан. режим 2-ой устан. режим Перех. режим n” n Iя I”я = Iя
- 26. n = (U – RяIя)/(ceФ) = U/(ceФ) – RяIя/(ceФ) Частота вращения в режиме х.х. Наклон хар-ки
- 27. а – Ф (параллельное возбуждение); б – Ф или U якоря (последовательное возбуждение); в – U
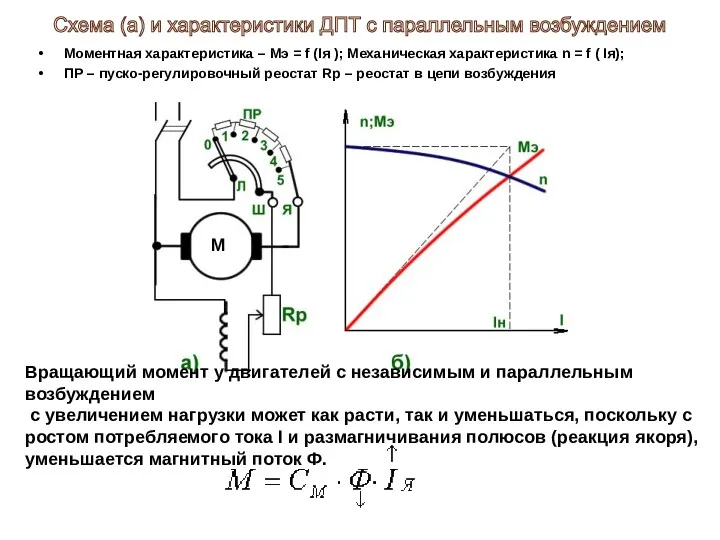
- 28. Моментная характеристика – Мэ = f (Iя ); Механическая характеристика n = f ( Iя); ПР
- 29. Моментная характеристика – Мэ = f(Iя ); Механическая характеристика n = f(Iя); ПР – пуско-регулировочный реостат
- 30. Формула момента двигателя постоянного тока: M=CMФ IЯ где CM - коэффициент пропорциональности. Вращающий момент у двигателей
- 31. Торможение ДПТ осуществляется тремя способами: динамическое, генераторное (рекуперативное), противовключением Схема (а) и диаграмма : (б) -
- 32. Схема (а) и диаграмма (б) торможения противовключением
- 33. Реверсирование или изменение направления вращения якоря двигателей постоянного тока может осуществляться изменением полярности тока либо в
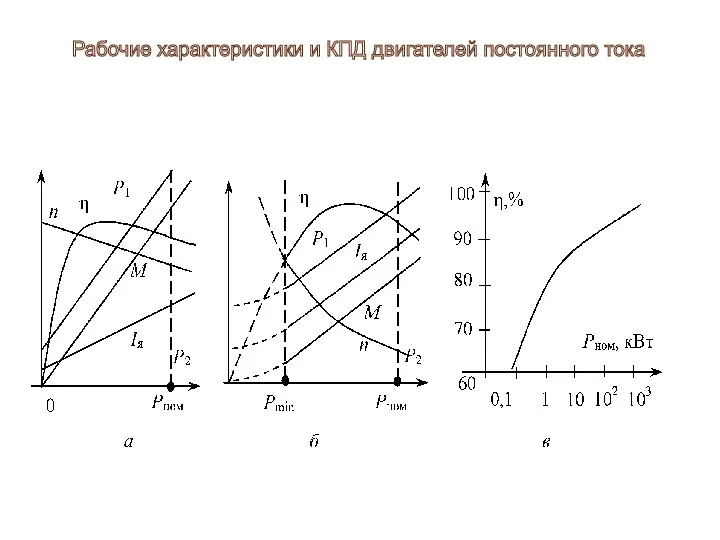
- 34. Рабочие характеристики и КПД двигателей постоянного тока
- 35. Pпотр – Р1 - потребляемая электрическая мощность от источника, Вт Pпотерь – потери электрической энергии в
- 36. Достоинства и недостатки двигателей постоянного тока
- 37. 1. ДПТ с параллельным возбуждением имеет паспортные данные: напряжение питания Uн, полезная мощность P2н, частота вращения
- 38. Что такое режим холостого хода и короткого замыкания для двигателя постоянного тока? 2. Какие функции выполняет
- 39. Генератор постоянного тока в разрезе
- 40. а – независимое возбуждение ; б – параллельное воэбуждение; в – последовательное возбуждение; г- -смешанное возбуждение.
- 41. Нагрузка отключена; Наличие остаточного магнитного потока Ф; Однонаправленность остаточного магнитного потока и потока возбуждения; Сопротивление цепи
- 42. Якорь генератора приводится во вращение приводным двигателем, развивающим вращающий момент М1.Якорь генератора начинает вращаться с частотой
- 43. Нагрузка Uс Е Д Uв Iв IвWв Фв Фр ЭМИ ЭМС Мпр n Мвр Iя IяWя
- 44. В установившемся режиме электрическая схема замещения генератора имеет вид Схема замещения якоря ГПТ По второму закону
- 45. Рис.а – при перемагничивании стали; 3 – основная характеристика холостого хода; Рис. б – при изменении
- 46. а) – ΔUпн – изменение напряжения ГПТ при изменении нагрузки от номинальной до 0. б) –
- 47. Задача 9-12. Определить ток якоря и напряжение генератора с независимым возбуждением для токов возбуждения Iв, равных
- 49. Скачать презентацию
Электрические машины постоянного тока по своему назначению делятся на
генераторы, преобразующие
генераторы, преобразующие

1 – подшипниковый щит; 2 – подшипник; 3 – вентилятор; 4
1 – подшипниковый щит; 2 – подшипник; 3 – вентилятор; 4
Обмотка ротора
Полюса статора
Станина
Щетки
Подшипниковый щит
Подшипники
Вал ротора
Подшипниковый щит
Полюса ротора
подшипниковый щит
Коллектор
Устройство машины постоянного тока
Обмотка ротора
Полюса статора
Станина
Щетки
Подшипниковый щит
Подшипники
Вал ротора
Подшипниковый щит
Полюса ротора
подшипниковый щит
Коллектор
Устройство машины постоянного тока
Устройство якоря: 1 – магнитопровод якоря; 2- обмотка якоря; 3 -
Устройство якоря: 1 – магнитопровод якоря; 2- обмотка якоря; 3 -

1 – главный полюс; 2 – дополнительный полюс; 3 - корпус
Устройство
1 – главный полюс; 2 – дополнительный полюс; 3 - корпус
Устройство
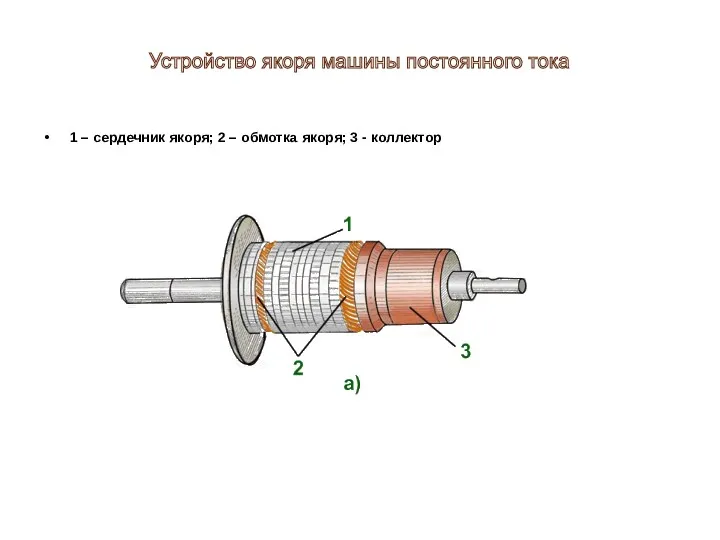
1 – сердечник якоря; 2 – обмотка якоря; 3 - коллектор
Устройство
1 – сердечник якоря; 2 – обмотка якоря; 3 - коллектор
Устройство
4 – щётки; 5 - пружины, прижимающие щётки к коллектору
Устройство щеткодержателя
4 – щётки; 5 - пружины, прижимающие щётки к коллектору
Устройство щеткодержателя
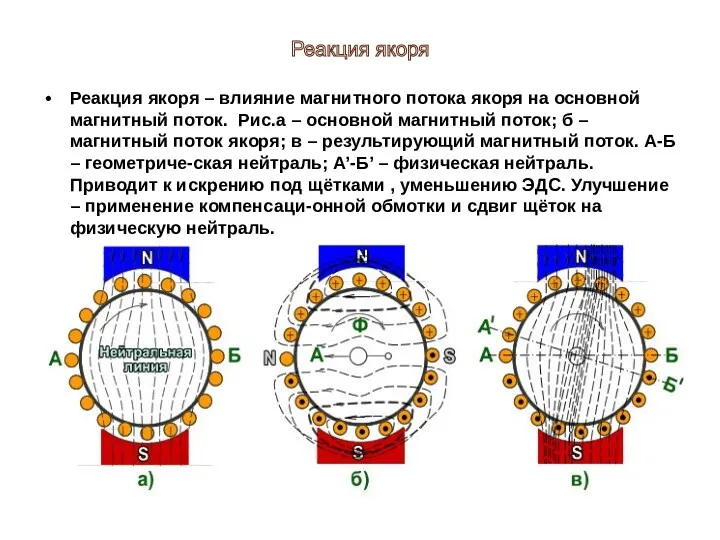
Реакция якоря – влияние магнитного потока якоря на основной магнитный поток.
Реакция якоря – влияние магнитного потока якоря на основной магнитный поток.
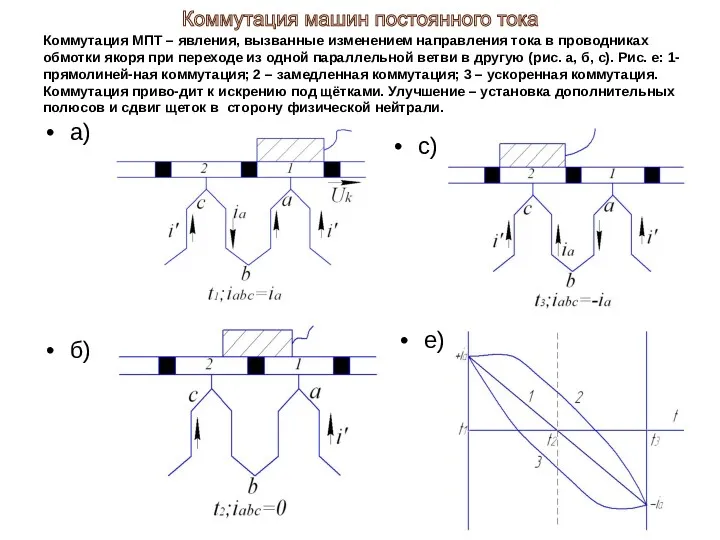
Коммутация МПТ – явления, вызванные изменением направления тока в проводниках обмотки
Коммутация МПТ – явления, вызванные изменением направления тока в проводниках обмотки
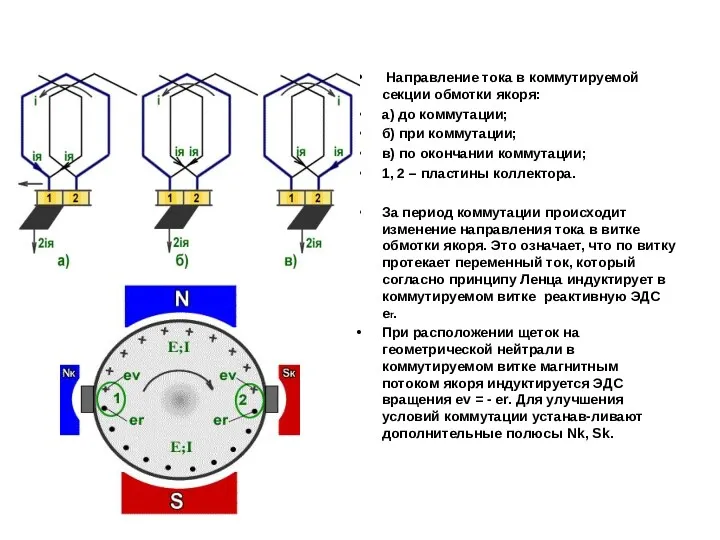
Направление тока в коммутируемой секции обмотки якоря:
а) до коммутации;
б)
Направление тока в коммутируемой секции обмотки якоря:
а) до коммутации;
б)

Двигатель постоянного тока
Двигатель постоянного тока
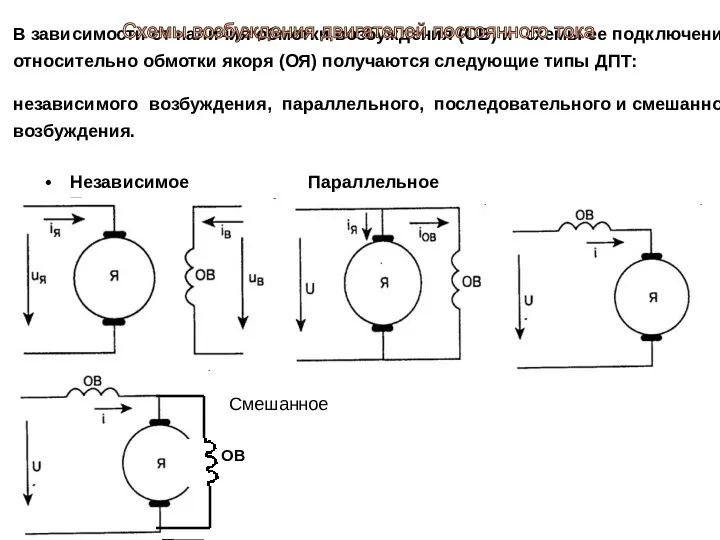
В зависимости от наличия обмотки возбуждения (ОВ) и схемы ее подключения
В зависимости от наличия обмотки возбуждения (ОВ) и схемы ее подключения

Источник
Uс
Е
РМ
Uв
Iв
IвWв
Фв
Фр
ЭМИ
ЭМС
Мвр
n
Мпр
Iя
IяWя
Фя
Uc>E
Iя = (Uc – E)/Rя
Условно-логическая схема двигателя постоянного тока
Источник
Uс
Е
РМ
Uв
Iв
IвWв
Фв
Фр
ЭМИ
ЭМС
Мвр
n
Мпр
Iя
IяWя
Фя
Uc>E
Iя = (Uc – E)/Rя
Условно-логическая схема двигателя постоянного тока
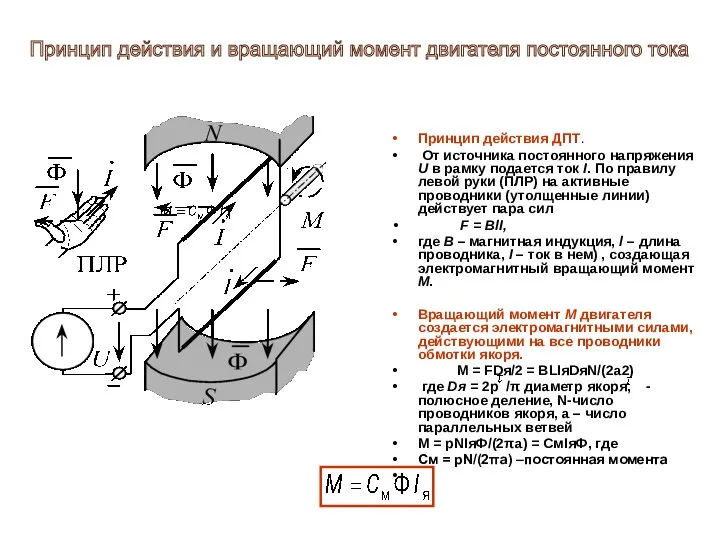
Принцип действия ДПТ.
От источника постоянного напряжения U в рамку
Принцип действия ДПТ.
От источника постоянного напряжения U в рамку
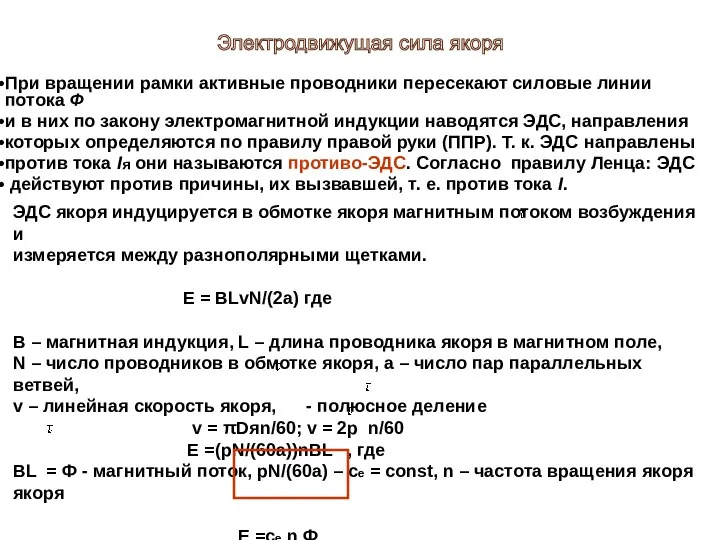
ЭДС якоря индуцируется в обмотке якоря магнитным потоком возбуждения и
измеряется
ЭДС якоря индуцируется в обмотке якоря магнитным потоком возбуждения и
измеряется
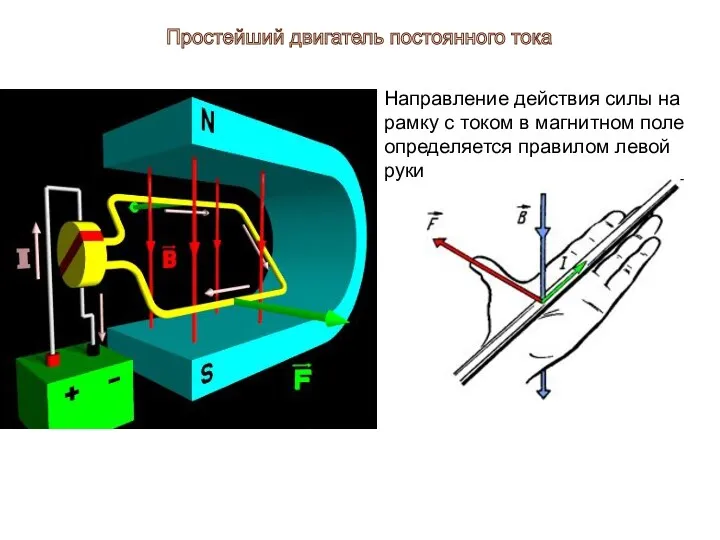
Направление действия силы на рамку с током в магнитном поле определяется
Направление действия силы на рамку с током в магнитном поле определяется
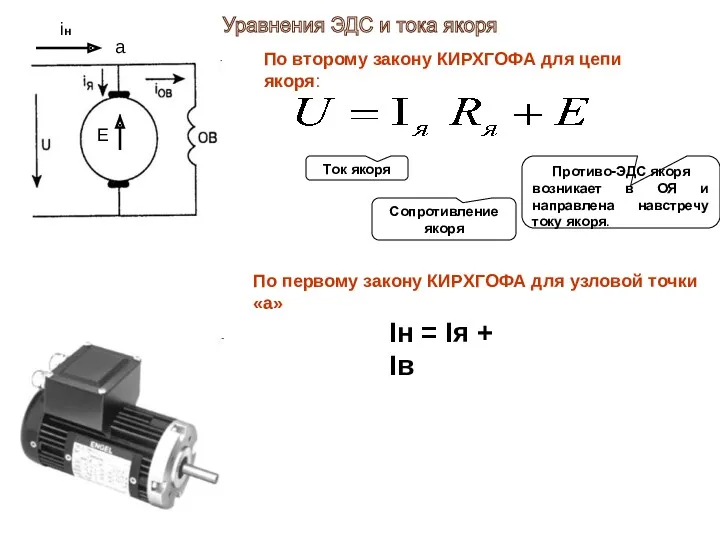
Противо-ЭДС якоря
возникает в ОЯ и направлена навстречу току якоря.
Ток якоря
Сопротивление якоря
iн
Е
По
Противо-ЭДС якоря
возникает в ОЯ и направлена навстречу току якоря.
Ток якоря
Сопротивление якоря
iн
Е
По

U – напряжение сети; Ф – магнитный поток; М – вращающий
U – напряжение сети; Ф – магнитный поток; М – вращающий
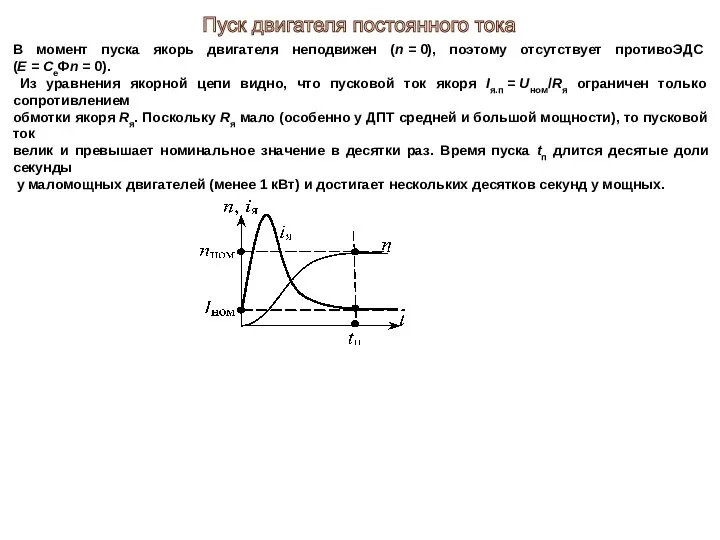
В момент пуска якорь двигателя неподвижен (n = 0), поэтому отсутствует противоЭДС (E = CeФn = 0).
В момент пуска якорь двигателя неподвижен (n = 0), поэтому отсутствует противоЭДС (E = CeФn = 0).
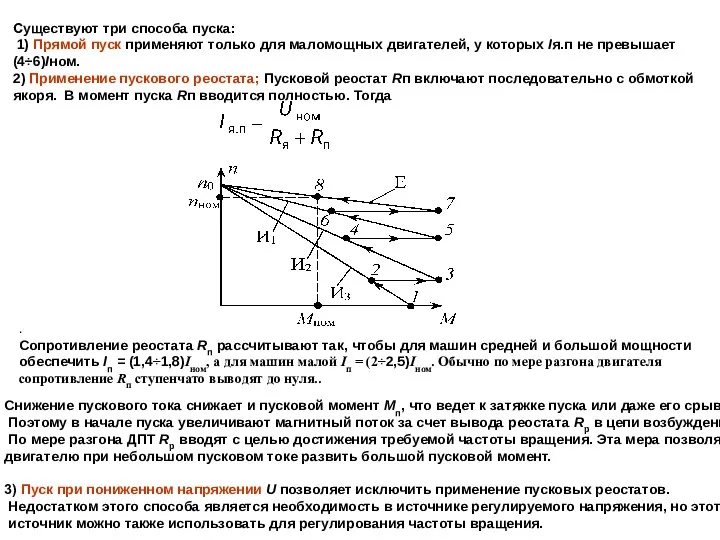
Существуют три способа пуска:
1) Прямой пуск применяют только для маломощных
Существуют три способа пуска:
1) Прямой пуск применяют только для маломощных
М
Q
+
_
Rв
Пуск
Работа
Пуск
LM
Пуск ДПТ реостатом в цепи якоря
Rп
М
Q
+
_
Rв
Пуск
Работа
Пуск
LM
Пуск ДПТ реостатом в цепи якоря
Rп
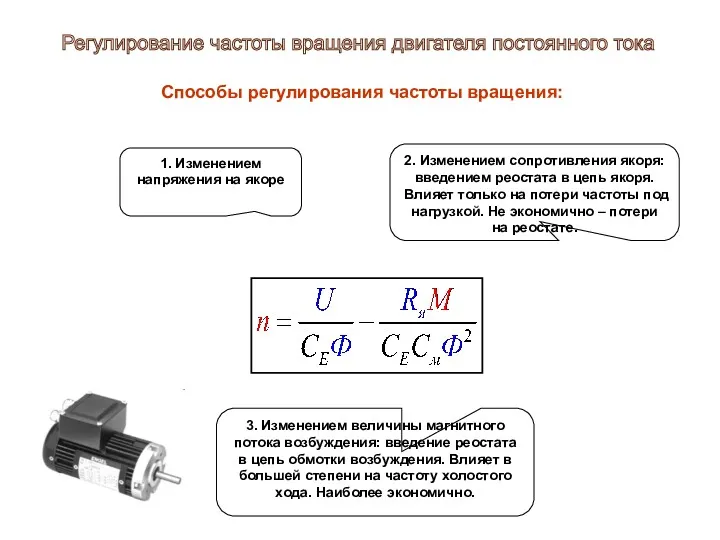
1. Изменением напряжения на якоре
2. Изменением сопротивления якоря: введением реостата в
1. Изменением напряжения на якоре
2. Изменением сопротивления якоря: введением реостата в
n = (U – RяIя)/(ceФ) = U/(ceФ) – RяIя/(ceФ)
Iя
n
t
Iя
I”я = Iя
n
n”1-й
устан.
режим
Перех.
режим
2-ой
n = (U – RяIя)/(ceФ) = U/(ceФ) – RяIя/(ceФ)
Iя
n
t
Iя
I”я = Iя
n
n” 1-й Перех. 2-ой
устан.
режим
режим
Iя
n
1-ый
устан.
режим
2-ой
устан.
режим
Перех.
режим
n”< n
n
Iя
I”я = Iя
t
n = (U – RяIя)/(ceФ) = U/(ceФ)
Iя
n
1-ый
устан.
режим
2-ой
устан.
режим
Перех.
режим
n”< n
n
Iя
I”я = Iя
t
n = (U – RяIя)/(ceФ) = U/(ceФ)
n = (U – RяIя)/(ceФ) = U/(ceФ) – RяIя/(ceФ)
Частота вращения в
n = (U – RяIя)/(ceФ) = U/(ceФ) – RяIя/(ceФ)
Частота вращения в
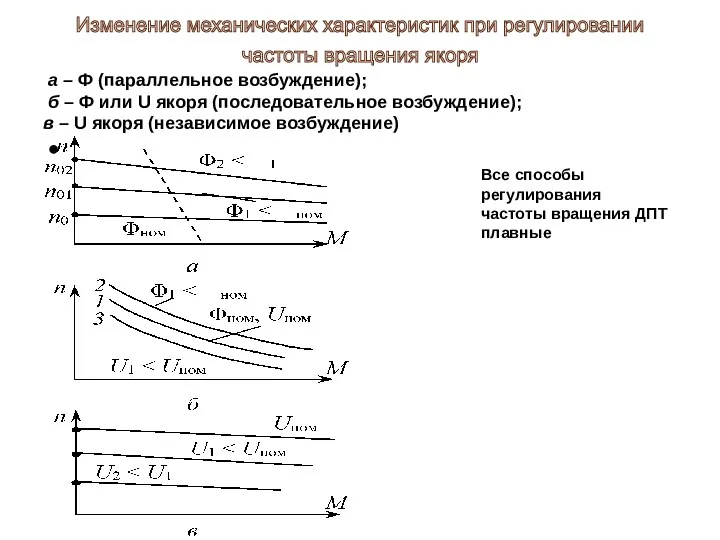
а – Ф (параллельное возбуждение);
б – Ф или U якоря (последовательное возбуждение);
в – U
а – Ф (параллельное возбуждение); б – Ф или U якоря (последовательное возбуждение); в – U
Моментная характеристика – Мэ = f (Iя ); Механическая характеристика n
Моментная характеристика – Мэ = f (Iя ); Механическая характеристика n
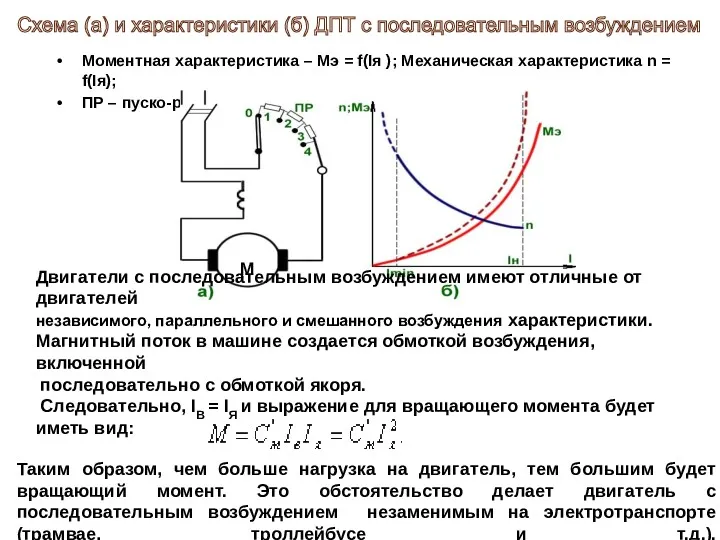
Моментная характеристика – Мэ = f(Iя ); Механическая характеристика n =
Моментная характеристика – Мэ = f(Iя ); Механическая характеристика n =
Формула момента двигателя постоянного тока:
M=CMФ IЯ
где CM - коэффициент
Формула момента двигателя постоянного тока:
M=CMФ IЯ
где CM - коэффициент

Торможение ДПТ осуществляется тремя способами: динамическое, генераторное (рекуперативное), противовключением
Схема (а) и
Торможение ДПТ осуществляется тремя способами: динамическое, генераторное (рекуперативное), противовключением
Схема (а) и
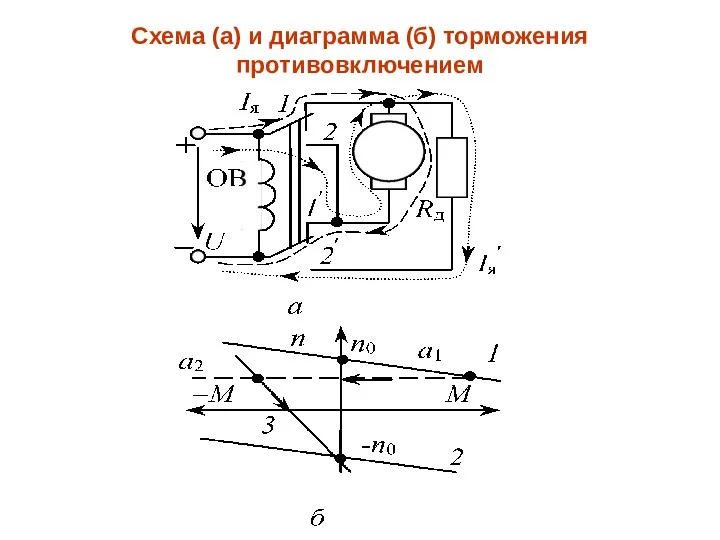
Схема (а) и диаграмма (б) торможения противовключением
Схема (а) и диаграмма (б) торможения противовключением
Реверсирование или изменение направления
вращения якоря двигателей постоянного тока может
осуществляться
Реверсирование или изменение направления
вращения якоря двигателей постоянного тока может
осуществляться
Рабочие характеристики и КПД двигателей постоянного тока
Рабочие характеристики и КПД двигателей постоянного тока
Pпотр – Р1 - потребляемая электрическая мощность от источника, Вт
Pпотерь –
Pпотр – Р1 - потребляемая электрическая мощность от источника, Вт
Pпотерь –
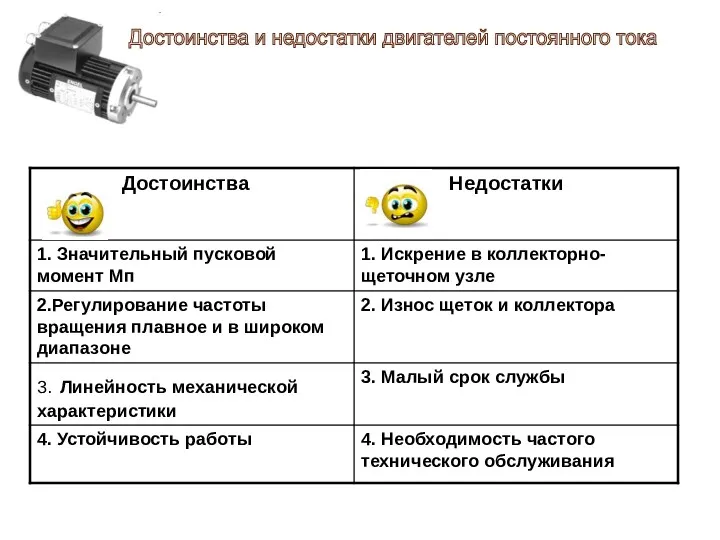
Достоинства и недостатки двигателей постоянного тока
Достоинства и недостатки двигателей постоянного тока
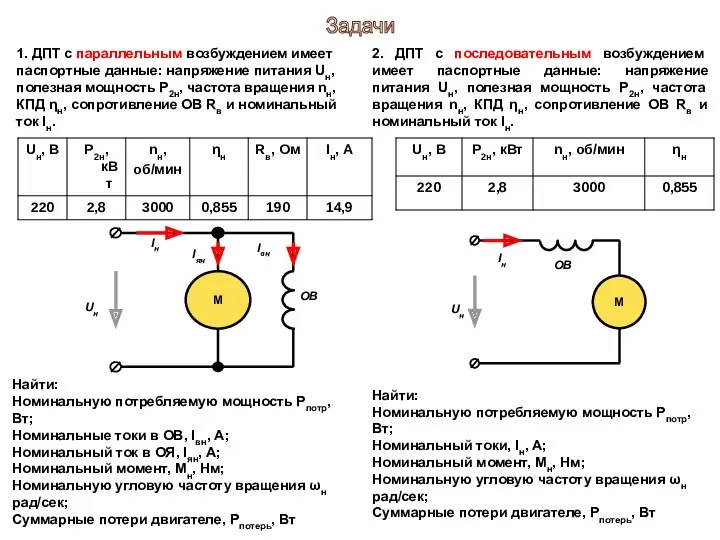
1. ДПТ с параллельным возбуждением имеет паспортные данные: напряжение питания Uн,
1. ДПТ с параллельным возбуждением имеет паспортные данные: напряжение питания Uн,
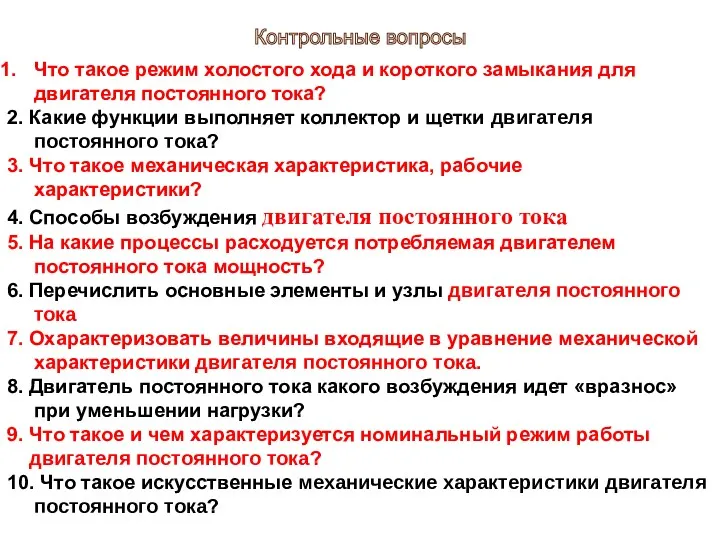
Что такое режим холостого хода и короткого замыкания для двигателя постоянного
Что такое режим холостого хода и короткого замыкания для двигателя постоянного

Генератор постоянного тока в разрезе
Генератор постоянного тока в разрезе
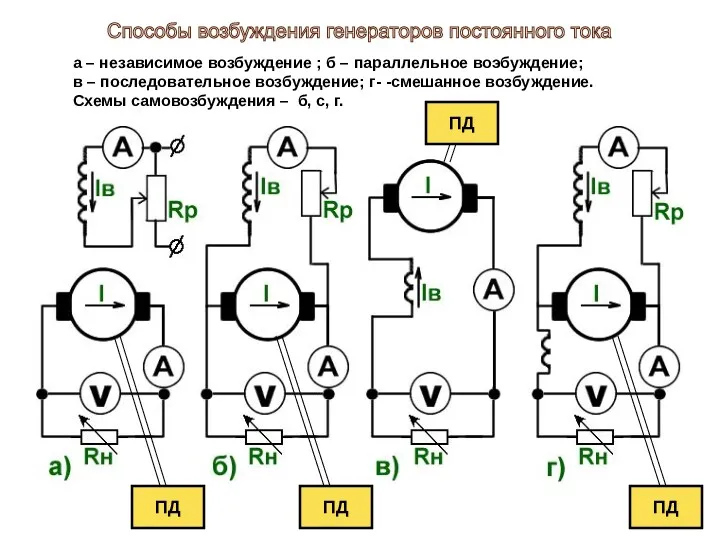
а – независимое возбуждение ; б – параллельное воэбуждение;
в –
а – независимое возбуждение ; б – параллельное воэбуждение; в –
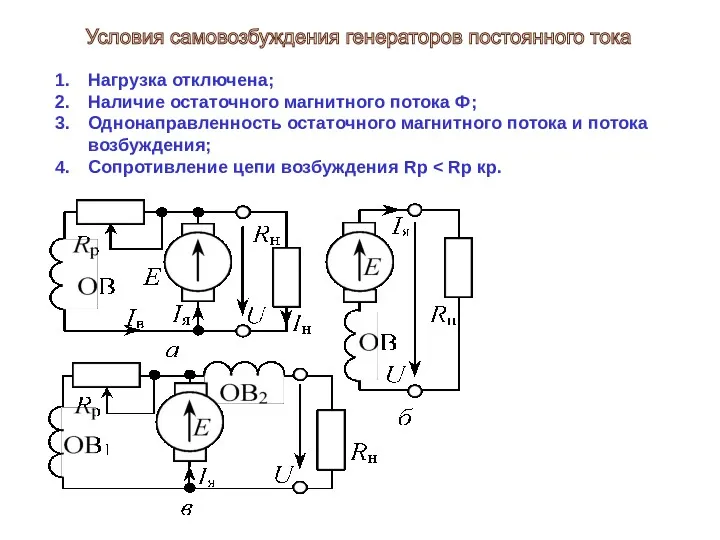
Нагрузка отключена;
Наличие остаточного магнитного потока Ф;
Однонаправленность остаточного магнитного потока и
Нагрузка отключена;
Наличие остаточного магнитного потока Ф;
Однонаправленность остаточного магнитного потока и
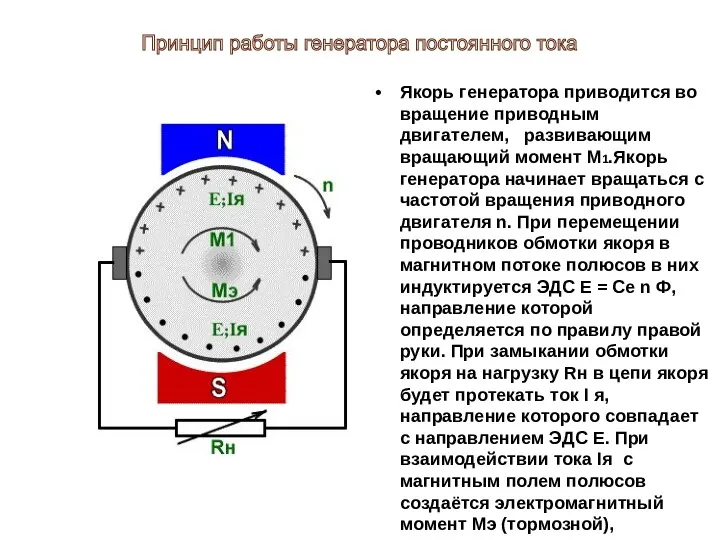
Якорь генератора приводится во вращение приводным двигателем, развивающим вращающий момент М1.Якорь
Якорь генератора приводится во вращение приводным двигателем, развивающим вращающий момент М1.Якорь

Нагрузка
Uс
Е
Д
Uв
Iв
IвWв
Фв
Фр
ЭМИ
ЭМС
Мпр
n
Мвр
Iя
IяWя
Фя
UcIя = (E – Uг)/Rя
Условно-логическая схема работы генератора постоянного тока
Нагрузка
Uс
Е
Д
Uв
Iв
IвWв
Фв
Фр
ЭМИ
ЭМС
Мпр
n
Мвр
Iя
IяWя
Фя
Uc Iя = (E – Uг)/Rя Условно-логическая схема работы генератора постоянного тока
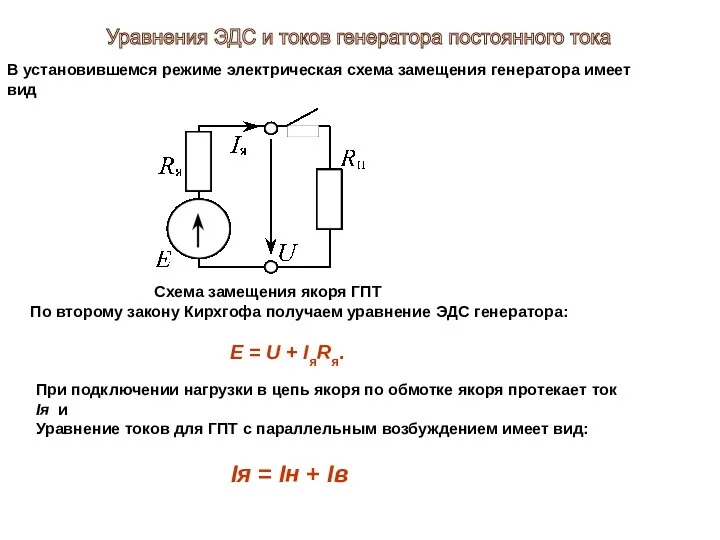
В установившемся режиме электрическая схема замещения генератора имеет вид
Схема
В установившемся режиме электрическая схема замещения генератора имеет вид
Схема
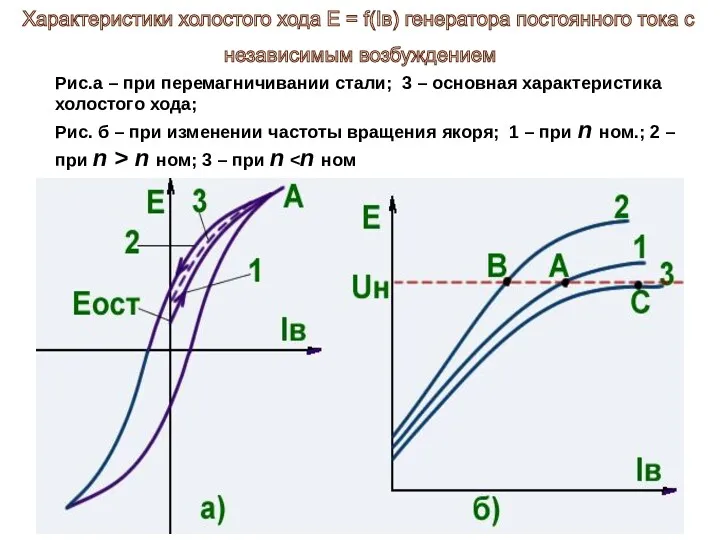
Рис.а – при перемагничивании стали; 3 – основная характеристика холостого хода;
Рис.а – при перемагничивании стали; 3 – основная характеристика холостого хода;
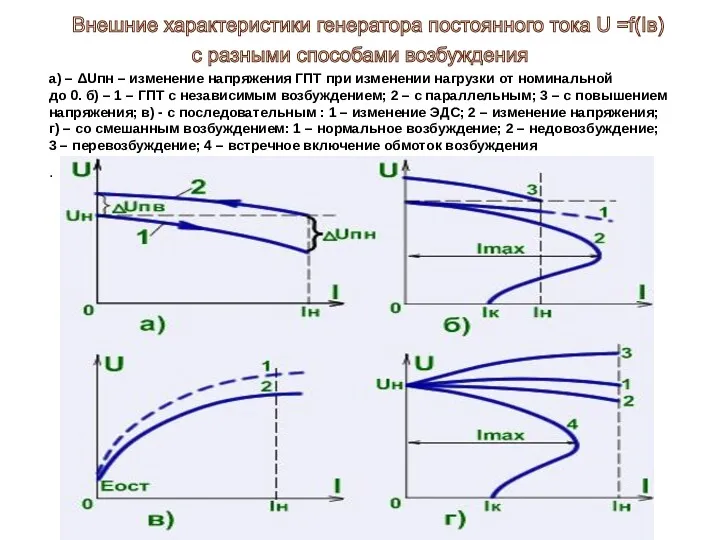
а) – ΔUпн – изменение напряжения ГПТ при изменении нагрузки от
а) – ΔUпн – изменение напряжения ГПТ при изменении нагрузки от
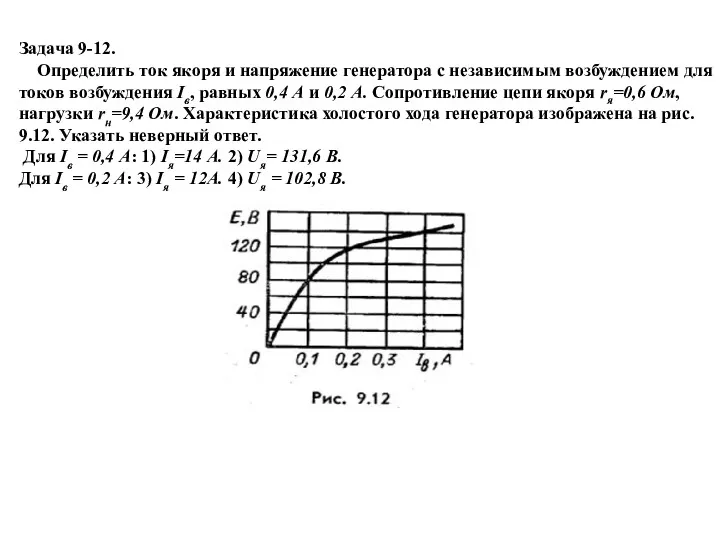
Задача 9-12.
Определить ток якоря и напряжение генератора с независимым
Задача 9-12.
Определить ток якоря и напряжение генератора с независимым
 Структурные уровни организации материи. Лекция 6 (1ч)
Структурные уровни организации материи. Лекция 6 (1ч) Водород. Физические свойства
Водород. Физические свойства Урок физики в 8 классе Электризация тел
Урок физики в 8 классе Электризация тел Ядролық гамма-резонанс
Ядролық гамма-резонанс Тепловые двигатели. Устройство и принцип действия
Тепловые двигатели. Устройство и принцип действия Расчёт давления жидкости на дно и стенки сосуда
Расчёт давления жидкости на дно и стенки сосуда Зависимость скорости испарения от рода жидкости
Зависимость скорости испарения от рода жидкости Основы технической диагностики. Диагностическая модель объекта контроля
Основы технической диагностики. Диагностическая модель объекта контроля Система питания дизельного двигателя
Система питания дизельного двигателя Посвящение в юные физики
Посвящение в юные физики Урок-соревнование Восхождение на пик механики
Урок-соревнование Восхождение на пик механики Источники электрического тока_презентация
Источники электрического тока_презентация Эволюция открытых систем
Эволюция открытых систем Детали машин
Детали машин ФРЕКС. Науковий образ світу. Мікросвіт
ФРЕКС. Науковий образ світу. Мікросвіт Ионные двигатели
Ионные двигатели Тербелістердің жалпы сипаттамалары
Тербелістердің жалпы сипаттамалары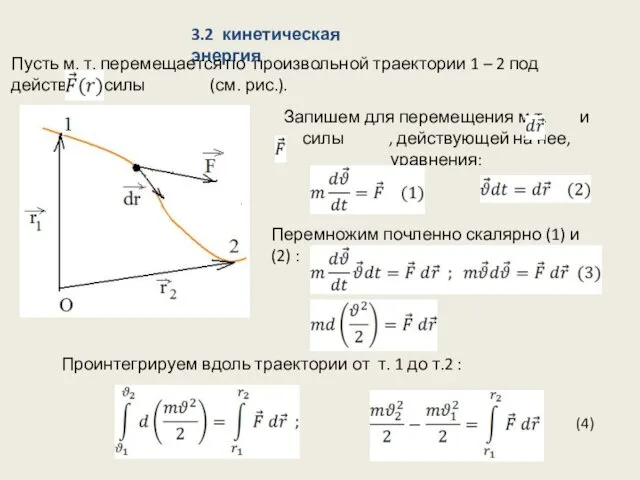 Кинетическая энергия
Кинетическая энергия Люмінесценція оксидних і халькогенідних стекол та їх кристалічних аналогів. (Лекція 7)
Люмінесценція оксидних і халькогенідних стекол та їх кристалічних аналогів. (Лекція 7) Молекулярная физика и термодинамика
Молекулярная физика и термодинамика Циклы. Теплотехника
Циклы. Теплотехника Влажность воздуха на различных широтах Земли
Влажность воздуха на различных широтах Земли Тепловые двигатели
Тепловые двигатели Основи молекулярно - кінетичної теорії газів (лекція 6)
Основи молекулярно - кінетичної теорії газів (лекція 6) Резание металла слесарной ножовкой (6 класс)
Резание металла слесарной ножовкой (6 класс) Домалау мойынтіректері
Домалау мойынтіректері Динамика, обобщение темы
Динамика, обобщение темы Лампа ДРВ, ДРЛ, ДРИ и ДНаТ
Лампа ДРВ, ДРЛ, ДРИ и ДНаТ