- Электропривод и его функциональная схема. Введение в дисциплину

Содержание
- 2. Введение в дисциплину Электропривод и его функциональная схема История развития электропривода (ЭП) Классификация ЭП Общие требования
- 3. 1 Электропривод и его функциональная схема ГОСТ 16593-79 “Электропривод. Термины и определения” – окончен срок действия
- 4. Преимущества электрической энергии: - возможность передачи энергии на большие расстояния; - постоянная готовность к работе; -
- 5. В течение одного рабочего дня один человек с помощью мускульной энергии может выработать около одного кВт*ч
- 6. Современный электропривод определяет собой уровень силовой электровооружённости труда и является, благодаря своим преимуществам по сравнению с
- 7. Электропривод − главный потребитель электроэнергии (более 60% всей производимой электроэнергии), остальное потребляют электротехнологии, транспорт, освещение и
- 8. Основные проблемы которые необходимо решать при развитии электропривода: 1) расширение функциональных возможностей электропривода в разнообразных технологических
- 9. Рис.1.1 Функциональная схема автоматизированного электропривода: ЭП − электрический преобразователь; ЭМП − электромеханический преобразователь; РД − ротор
- 10. Силовой канал обеспечивает преобразование электрической энергии, поступающей из системы электроснабжения, в механическую энергию с параметрами, необходимыми
- 11. Информационный канал включает в себя автоматизированную систему управления АСУ, датчики и преобразователи информации ДПИ, задающие устройства
- 12. Электроприводом называется электромеханическая система, предназначенная для приведения в движение рабочих органов машин и управления выполняемыми ими
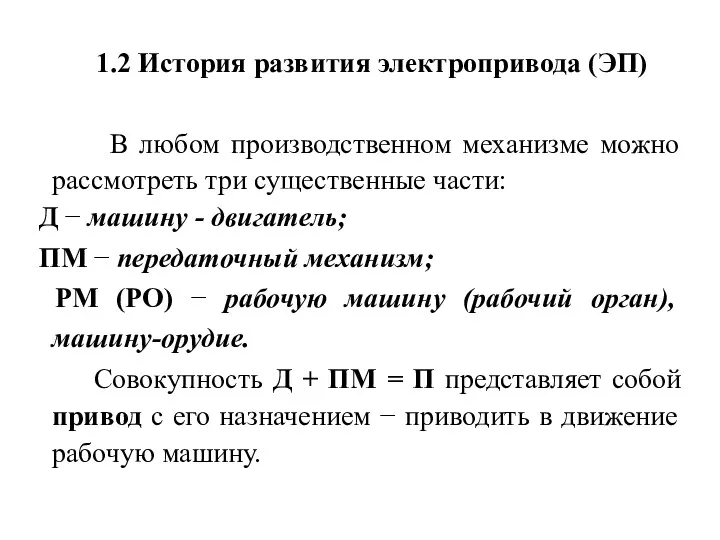
- 13. 1.2 История развития электропривода (ЭП) В любом производственном механизме можно рассмотреть три существенные части: Д −
- 14. На протяжении нескольких тысячелетий человек создает машины и механизмы, способные избавить его от тяжёлого и изнурительного
- 15. Применение для привода силы ветра и падающей силы воды привели к созданию водяного и ветряного привода.
- 16. В паровом приводе (рис.1.2) механическая энергия передаётся от парового двигателя к многочисленным рабочим органам через трансмиссионный
- 17. В электрическом приводе основным источником механической энергии становится электродвигатель, XX век можно назвать веком электричества, основной
- 18. Уже в 1834 г. русский академик Б.С. Якоби при участии академика Э.Х. Ленца сконструировал электродвигатель, основанный
- 19. Величайшее значение для всего дальнейшего развития электропривода имело открытие в 1886 г. Г. Феррарисом и Н.
- 20. 1834 − Мориц Герман в Германии построил первый рабочий ДПТ. 1838 − построил лодку с приводом
- 21. 1.3 Классификация электропривода (ЭП) - По способу распределения механической энергии: групповой привод − обеспечивает движение нескольких
- 22. взаимосвязанный привод − когда два или несколько электрически или механически связанных между собой электродвигателя обеспечивают заданное
- 23. По виду движения электроприводы могут обеспечить: вращательное движение, поступательное движения.
- 24. По степени управляемости электропривод может быть: - нерегулируемый - регулируемый - программно-управляемый - следящий - адаптивный
- 25. Нерегулируемый привод используется для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры
- 26. Следящий электропривод автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно
- 27. Электроприводы по роду передаточного устройства: - редукторный, в котором электродвигатель передает вращательное движение передаточному устройству, содержащему
- 28. - Электроприводы по уровню автоматизации можно различать: - неавтоматизированный электропривод, в котором управление ручное; в настоящее
- 29. По роду тока электроприводы могут быть: постоянного тока, переменного тока.
- 30. 1.4 Общие требования и направления развития ЭП Главные показатели, характеризующие электропривод как систему, ответственную за управляемое
- 31. 3. Быстродействие - способность системы достаточно быстро реагировать на различные воздействия; Качество динамических процессов - обеспечение
- 32. 6. Совместимость электропривода с системой электроснабжения, особенно при внедрении тиристорных электроприводов большой мощности; 7. Ресурсоёмкость -
- 33. Все показатели - технические, т.к. обеспечиваются техническими средствами. Но вместе с тем все они имеют вполне
- 34. Электропривод потребляет более 60% вырабатываемой энергии. В промышленности работает 90% электроприводов от всех применяемых. В сельском
- 35. Четыре направления развития ЭП сформулированы в 1930 г. на международном энергетическом конгрессе. Электропривод развивается по пути
- 36. Преимущества электродвигателей: Электродвигатели имеют КПД 75-90% против 28% у двигателей внутреннего сгорания Электродвигатели имеют пусковой момент
- 37. 1.5 Цель дисциплины и литература для изучения дисциплины Целью обучения по дисциплине является подготовка инженеров, способных
- 38. Литература Чиликин М. Г., Сандлер А. С., Общий курс электропривода: Учебник для вузов.—6-еизд. доп. и перераб.
- 39. ЛИТЕРАТУРА Основная Фираго Б.И., Павлячик Л.Б. Теория электропривода. – Мн.: ЗАО Техноперспектива, 2004 – 527 с.
- 40. ЛИТЕРАТУРА Дополнительная Браславский И.Я. Энергосберегающий асинхронный электропривод: Учеб. пособие для студ. высш. учеб. заведений / И.Я.Браславский,
- 42. Скачать презентацию
Введение в дисциплину
Электропривод и его функциональная схема
История развития электропривода
Введение в дисциплину
Электропривод и его функциональная схема
История развития электропривода
1 Электропривод и его функциональная схема
ГОСТ 16593-79 “Электропривод. Термины и определения”
1 Электропривод и его функциональная схема
ГОСТ 16593-79 “Электропривод. Термины и определения”
Преимущества электрической энергии:
- возможность передачи энергии на большие расстояния;
- постоянная
Преимущества электрической энергии:
- возможность передачи энергии на большие расстояния;
- постоянная
В течение одного рабочего дня один человек с помощью мускульной
В течение одного рабочего дня один человек с помощью мускульной
Современный электропривод определяет собой уровень силовой электровооружённости труда и является,
Современный электропривод определяет собой уровень силовой электровооружённости труда и является,
Электропривод − главный потребитель электроэнергии (более 60% всей производимой электроэнергии),
Электропривод − главный потребитель электроэнергии (более 60% всей производимой электроэнергии),
Основные проблемы которые необходимо решать при развитии электропривода:
1) расширение функциональных
Основные проблемы которые необходимо решать при развитии электропривода:
1) расширение функциональных
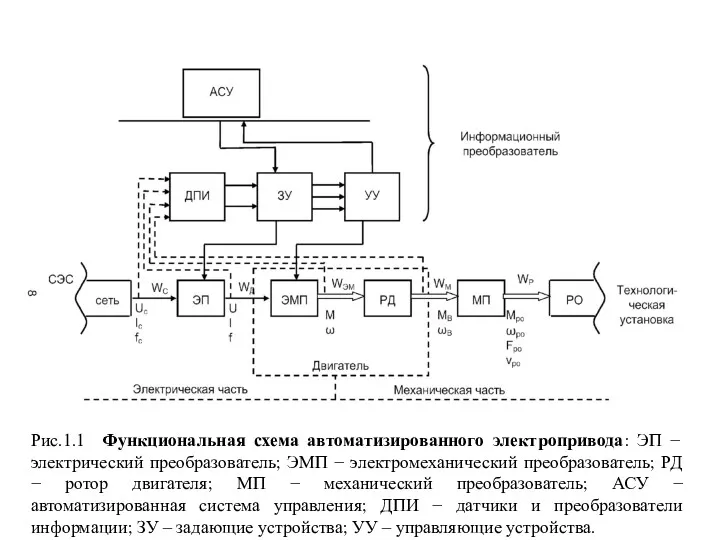
Рис.1.1 Функциональная схема автоматизированного электропривода: ЭП − электрический преобразователь; ЭМП −
Рис.1.1 Функциональная схема автоматизированного электропривода: ЭП − электрический преобразователь; ЭМП −
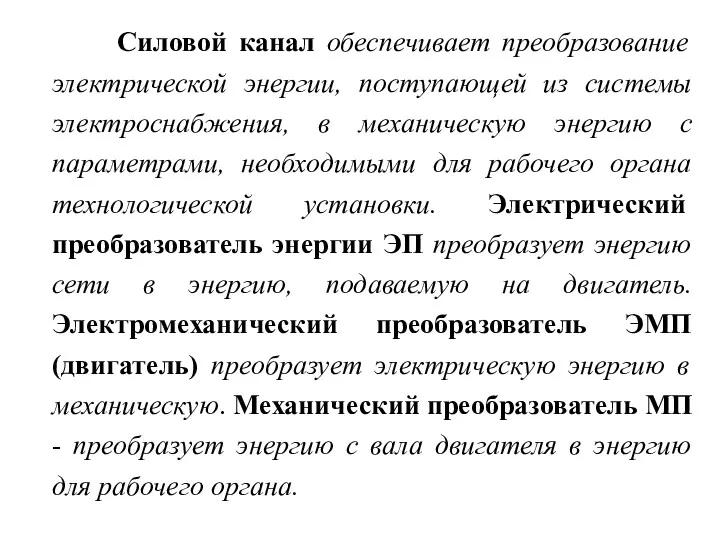
Силовой канал обеспечивает преобразование электрической энергии, поступающей из системы электроснабжения,
Силовой канал обеспечивает преобразование электрической энергии, поступающей из системы электроснабжения,
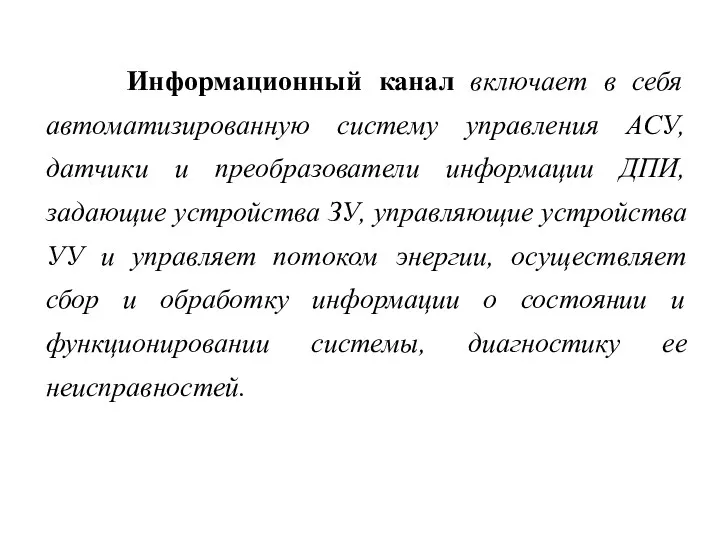
Информационный канал включает в себя автоматизированную систему управления АСУ, датчики
Информационный канал включает в себя автоматизированную систему управления АСУ, датчики
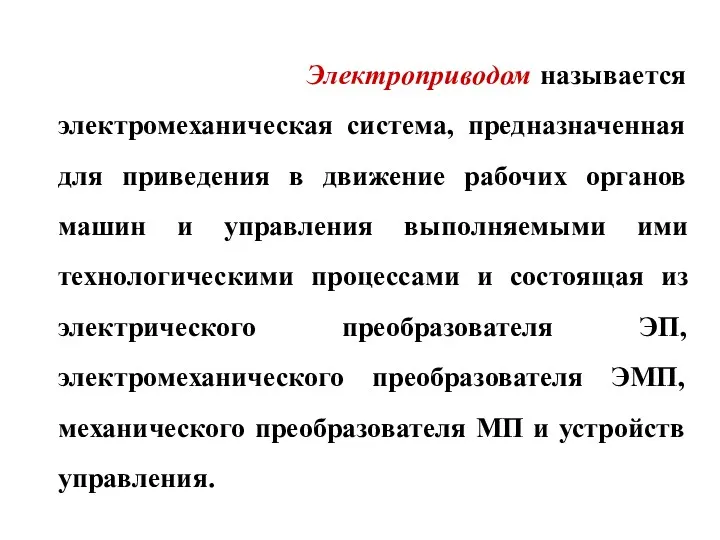
Электроприводом называется электромеханическая система, предназначенная для приведения в движение рабочих
Электроприводом называется электромеханическая система, предназначенная для приведения в движение рабочих
1.2 История развития электропривода (ЭП)
В любом производственном механизме можно рассмотреть
1.2 История развития электропривода (ЭП)
В любом производственном механизме можно рассмотреть
На протяжении нескольких тысячелетий человек создает машины и механизмы, способные
На протяжении нескольких тысячелетий человек создает машины и механизмы, способные
Применение для привода силы ветра и падающей силы воды привели к
Применение для привода силы ветра и падающей силы воды привели к
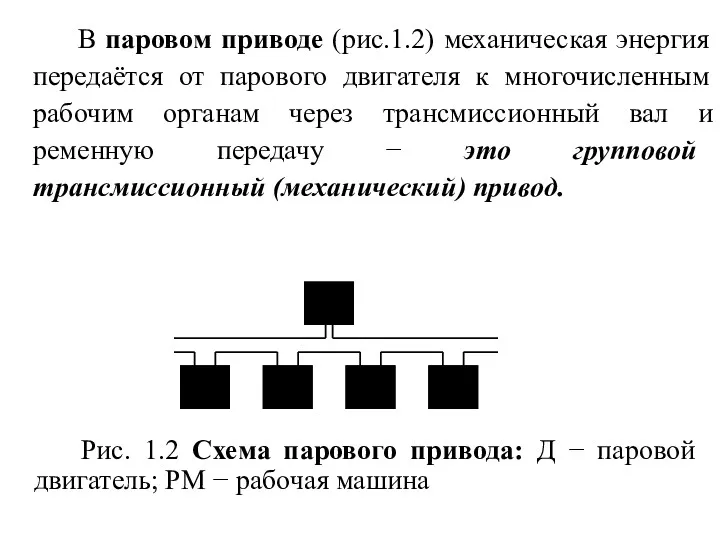
В паровом приводе (рис.1.2) механическая энергия передаётся от парового двигателя
В паровом приводе (рис.1.2) механическая энергия передаётся от парового двигателя
В электрическом приводе основным источником механической энергии становится электродвигатель, XX
В электрическом приводе основным источником механической энергии становится электродвигатель, XX
Уже в 1834 г. русский академик Б.С. Якоби при участии
Уже в 1834 г. русский академик Б.С. Якоби при участии
Величайшее значение для всего дальнейшего развития электропривода имело открытие в
Величайшее значение для всего дальнейшего развития электропривода имело открытие в
1834 − Мориц Герман в Германии построил первый рабочий ДПТ.
1834 − Мориц Герман в Германии построил первый рабочий ДПТ.
1.3 Классификация электропривода (ЭП)
- По способу распределения механической энергии:
групповой
1.3 Классификация электропривода (ЭП)
- По способу распределения механической энергии:
групповой
взаимосвязанный привод − когда два или несколько электрически или механически
взаимосвязанный привод − когда два или несколько электрически или механически
По виду движения электроприводы могут обеспечить:
вращательное движение,
поступательное движения.
По виду движения электроприводы могут обеспечить:
вращательное движение,
поступательное движения.
По степени управляемости электропривод может быть:
- нерегулируемый
- регулируемый
- программно-управляемый
- следящий
-
По степени управляемости электропривод может быть:
- нерегулируемый
- регулируемый
- программно-управляемый
- следящий
-
Нерегулируемый привод используется для приведения в действие исполнительного органа рабочей
Нерегулируемый привод используется для приведения в действие исполнительного органа рабочей
Следящий электропривод автоматически отрабатывающий перемещение исполнительного органа рабочей машины с
Следящий электропривод автоматически отрабатывающий перемещение исполнительного органа рабочей машины с
Электроприводы по роду передаточного устройства:
- редукторный, в котором электродвигатель
Электроприводы по роду передаточного устройства:
- редукторный, в котором электродвигатель
- Электроприводы по уровню автоматизации можно различать:
- неавтоматизированный электропривод,
- Электроприводы по уровню автоматизации можно различать:
- неавтоматизированный электропривод,
По роду тока электроприводы могут быть:
постоянного тока,
переменного тока.
По роду тока электроприводы могут быть:
постоянного тока,
переменного тока.
1.4 Общие требования и направления развития ЭП
Главные показатели, характеризующие электропривод
1.4 Общие требования и направления развития ЭП
Главные показатели, характеризующие электропривод
3. Быстродействие - способность системы достаточно быстро реагировать на различные воздействия;
Качество
3. Быстродействие - способность системы достаточно быстро реагировать на различные воздействия;
Качество
6. Совместимость электропривода с системой электроснабжения, особенно при внедрении тиристорных
6. Совместимость электропривода с системой электроснабжения, особенно при внедрении тиристорных
Все показатели - технические, т.к. обеспечиваются техническими средствами. Но вместе
Все показатели - технические, т.к. обеспечиваются техническими средствами. Но вместе
Электропривод потребляет более 60% вырабатываемой энергии. В промышленности работает 90%
Электропривод потребляет более 60% вырабатываемой энергии. В промышленности работает 90%
Четыре направления развития ЭП сформулированы в 1930 г. на международном
Четыре направления развития ЭП сформулированы в 1930 г. на международном
Преимущества электродвигателей:
Электродвигатели имеют КПД 75-90% против 28% у двигателей
Преимущества электродвигателей:
Электродвигатели имеют КПД 75-90% против 28% у двигателей
1.5 Цель дисциплины и литература для изучения дисциплины
Целью обучения
1.5 Цель дисциплины и литература для изучения дисциплины
Целью обучения
Литература
Чиликин М. Г., Сандлер А. С., Общий курс электропривода: Учебник
Литература
Чиликин М. Г., Сандлер А. С., Общий курс электропривода: Учебник
ЛИТЕРАТУРА
Основная
Фираго Б.И., Павлячик Л.Б. Теория электропривода. – Мн.: ЗАО Техноперспектива, 2004
ЛИТЕРАТУРА
Основная
Фираго Б.И., Павлячик Л.Б. Теория электропривода. – Мн.: ЗАО Техноперспектива, 2004
ЛИТЕРАТУРА
Дополнительная
Браславский И.Я. Энергосберегающий асинхронный электропривод: Учеб. пособие для студ. высш. учеб.
ЛИТЕРАТУРА
Дополнительная
Браславский И.Я. Энергосберегающий асинхронный электропривод: Учеб. пособие для студ. высш. учеб.
 The importance of the direct to reverberant ratio in the perception of distance, localization, clarity, and envelopment
The importance of the direct to reverberant ratio in the perception of distance, localization, clarity, and envelopment Полупроводниковые материалы. Удельное сопротивление
Полупроводниковые материалы. Удельное сопротивление Движение системы связанных тел
Движение системы связанных тел Гигиена труда с радиоактивными веществами и источниками ионизирующего излучения
Гигиена труда с радиоактивными веществами и источниками ионизирующего излучения Основные сведения о механизмах. Раздел 1
Основные сведения о механизмах. Раздел 1 Олимпиадная физика
Олимпиадная физика Градуировка спектроскопа. Определение длины волны спектральных линий
Градуировка спектроскопа. Определение длины волны спектральных линий Постоянный электрический ток
Постоянный электрический ток открытый урок-презентация на тему История Российской атомной энергетики
открытый урок-презентация на тему История Российской атомной энергетики Презентация по физике по теме Плавание тел для 7 кл.
Презентация по физике по теме Плавание тел для 7 кл. ПрезентацияСвет.Источники света.
ПрезентацияСвет.Источники света. Радиационная физика
Радиационная физика внеурочная деятельность учащихся по физике
внеурочная деятельность учащихся по физике Дифракция света на ультразвуке (акустооптическая дифракция)
Дифракция света на ультразвуке (акустооптическая дифракция) Шкала электромагнитных излучений
Шкала электромагнитных излучений презентация на тему Сообщающиеся сосуды
презентация на тему Сообщающиеся сосуды Конструирование валов
Конструирование валов Устройство и принцип действия тепловых машин
Устройство и принцип действия тепловых машин Элементы физики твердого тела
Элементы физики твердого тела Движение атмосферы
Движение атмосферы Электрические явления
Электрические явления Работа в электростатическом поле
Работа в электростатическом поле презентация Векторы.Действия над векторами.Проекция вектора
презентация Векторы.Действия над векторами.Проекция вектора Электрическое напряжение. Единицы напряжения. Вольтметр
Электрическое напряжение. Единицы напряжения. Вольтметр Презентация к уроку физики по теме: Явление электромагнитной индукции
Презентация к уроку физики по теме: Явление электромагнитной индукции Неисправности и условия при которых запрещена эксплуатация ТС
Неисправности и условия при которых запрещена эксплуатация ТС Конусные дробилки
Конусные дробилки Физика – (греч . ta physika, от physis - природа), наука о природе. (Лекция 1)
Физика – (греч . ta physika, от physis - природа), наука о природе. (Лекция 1)