- Основные сведения о механизмах. Раздел 1

Содержание
- 2. Звенья и кинематические пары, их классификация Звеном называется неподвижное соединение группы деталей или отдельная деталь, совершающая
- 3. В зависимости от характера движения твердые звенья принято называть: кривошип, если движение вращательное; ползун, если движение
- 4. коромысло, если движение качательное; кулиса – подвижная направляющая для ползуна.
- 5. Кинематической парой (КП) называется подвижное соединение двух соприкасающихся звеньев, взаимно ограничивающие движение одного звена относительно другого.
- 6. По характеру соприкосновения звеньев кинематические пары подразделяют на низшие и высшие. Низшие кинематические пары (НКП) имеют
- 7. Шар-плоскость Класс пары – I Число условий связи – 1 Число степеней свободы - 5
- 8. Цилиндр-плоскость Класс пары – II Число условий связи – 2 Число степеней свободы - 4
- 9. Сферическая Класс пары – III Число условий связи – 3 Число степеней свободы - 3
- 10. Цилиндрическая Класс пары – IV Число условий связи – 4 Число степеней свободы - 2
- 11. Поступательная Класс пары – V Число условий связи – 5 Число степеней свободы - 1
- 12. Вращательная Класс пары – V Число условий связи – 5 Число степеней свободы - 1
- 13. Винтовая Класс пары – V Число условий связи – 5 Число степеней свободы - 1
- 14. Кинематические цепи Звенья, соединенные КП, образуют кинематическую цепь (КЦ). Кинематические цепи бывают простые и сложные, открытые
- 15. В простой кинематической цепи каждое звено входит не более чем в две кинематические пары; в сложной
- 16. Открытой называется КЦ, в которой есть звенья, входящие только в одну КП. Замкнутой называется КЦ, в
- 17. Если точки всех звеньев могут перемещаться в одной плоскости или в параллельных плоскостях, то КЦ называется
- 18. Структурные формулы кинематических цепей Пространственная КЦ Если в пространственной КЦ n звеньев, то общее число степеней
- 19. Пусть в состав КЦ входят КП от первого до пятого класса, число которых соответственно равно р1,
- 21. Скачать презентацию
Звенья и кинематические пары, их классификация
Звеном называется неподвижное соединение группы деталей
Звенья и кинематические пары, их классификация
Звеном называется неподвижное соединение группы деталей

В зависимости от характера движения твердые звенья принято называть:
кривошип, если
В зависимости от характера движения твердые звенья принято называть:
кривошип, если
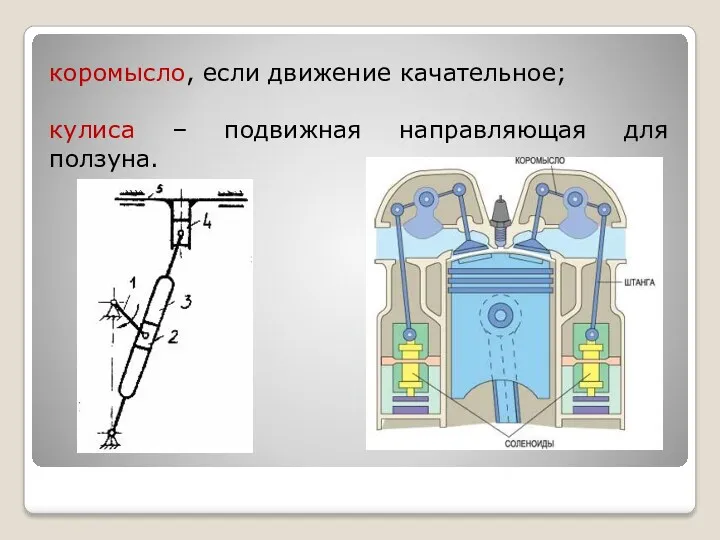
коромысло, если движение качательное;
кулиса – подвижная направляющая для ползуна.
коромысло, если движение качательное;
кулиса – подвижная направляющая для ползуна.
Кинематической парой (КП) называется подвижное соединение двух соприкасающихся звеньев, взаимно
Кинематической парой (КП) называется подвижное соединение двух соприкасающихся звеньев, взаимно
По характеру соприкосновения звеньев кинематические пары подразделяют на низшие и
По характеру соприкосновения звеньев кинематические пары подразделяют на низшие и
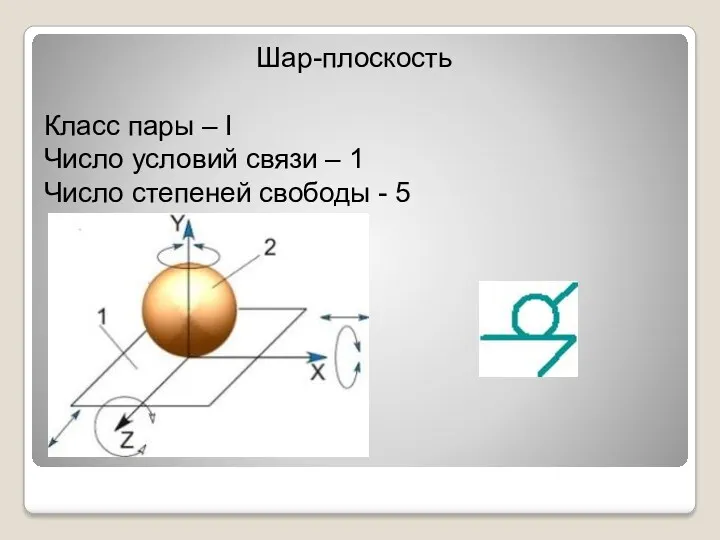
Шар-плоскость
Класс пары – I
Число условий связи – 1
Число степеней свободы -
Шар-плоскость
Класс пары – I
Число условий связи – 1
Число степеней свободы -
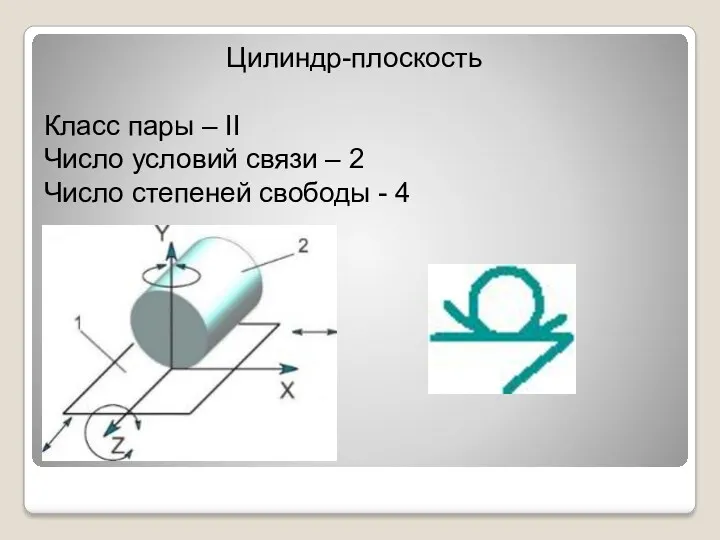
Цилиндр-плоскость
Класс пары – II
Число условий связи – 2
Число степеней свободы -
Цилиндр-плоскость
Класс пары – II
Число условий связи – 2
Число степеней свободы -
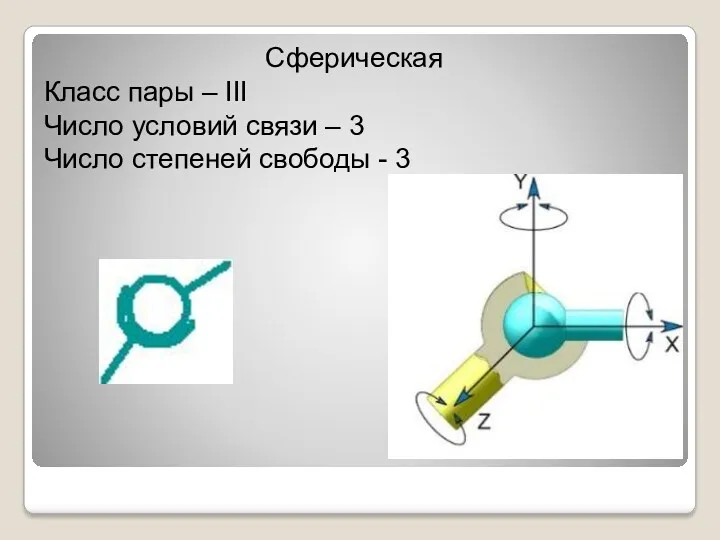
Сферическая
Класс пары – III
Число условий связи – 3
Число степеней свободы -
Сферическая
Класс пары – III
Число условий связи – 3
Число степеней свободы -
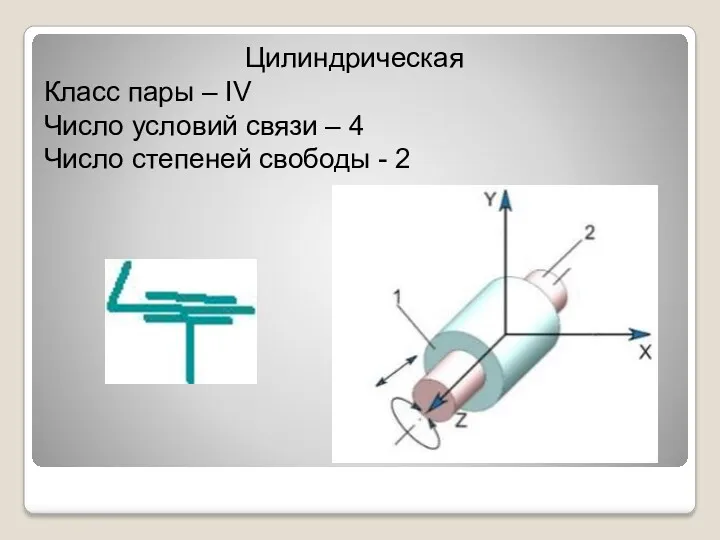
Цилиндрическая
Класс пары – IV
Число условий связи – 4
Число степеней свободы -
Цилиндрическая
Класс пары – IV
Число условий связи – 4
Число степеней свободы -
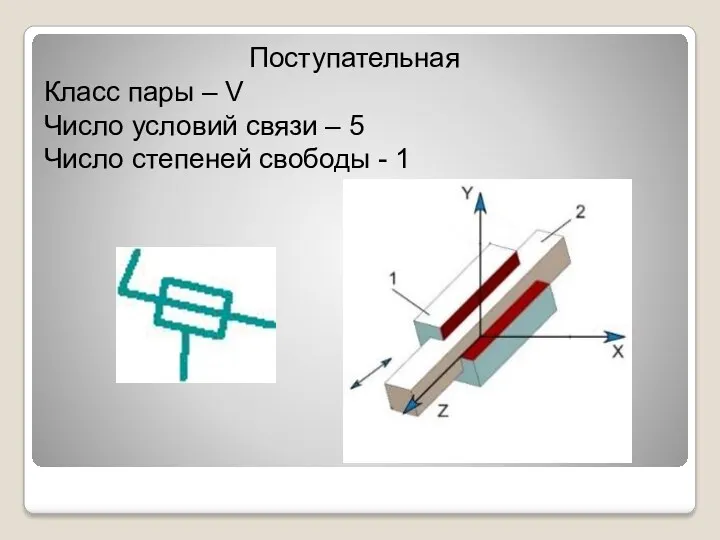
Поступательная
Класс пары – V
Число условий связи – 5
Число степеней свободы -
Поступательная
Класс пары – V
Число условий связи – 5
Число степеней свободы -
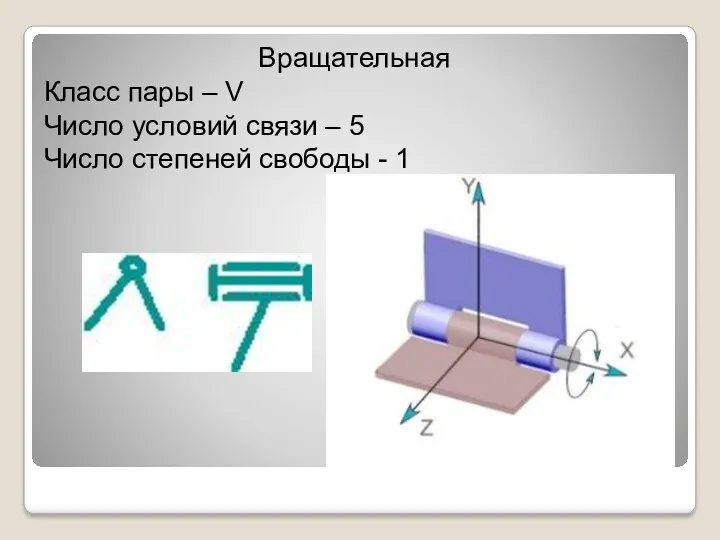
Вращательная
Класс пары – V
Число условий связи – 5
Число степеней свободы -
Вращательная
Класс пары – V
Число условий связи – 5
Число степеней свободы -

Винтовая
Класс пары – V
Число условий связи – 5
Число степеней свободы -
Винтовая
Класс пары – V
Число условий связи – 5
Число степеней свободы -
Кинематические цепи
Звенья, соединенные КП, образуют кинематическую цепь (КЦ). Кинематические цепи
Кинематические цепи
Звенья, соединенные КП, образуют кинематическую цепь (КЦ). Кинематические цепи
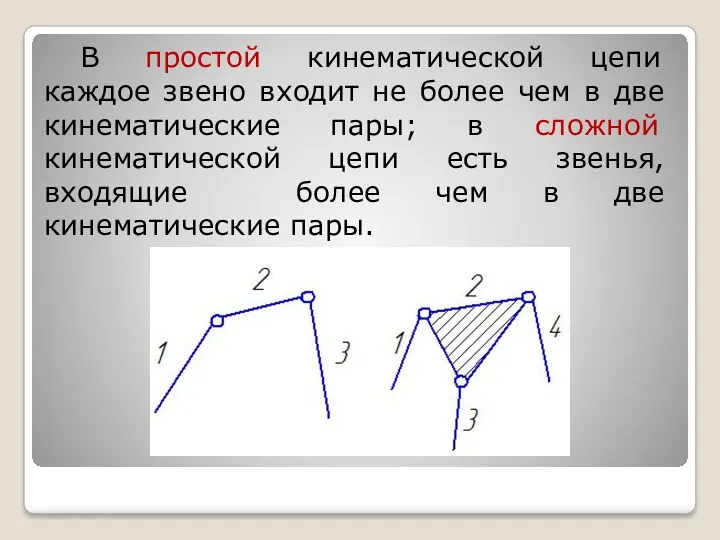
В простой кинематической цепи каждое звено входит не более чем в
В простой кинематической цепи каждое звено входит не более чем в
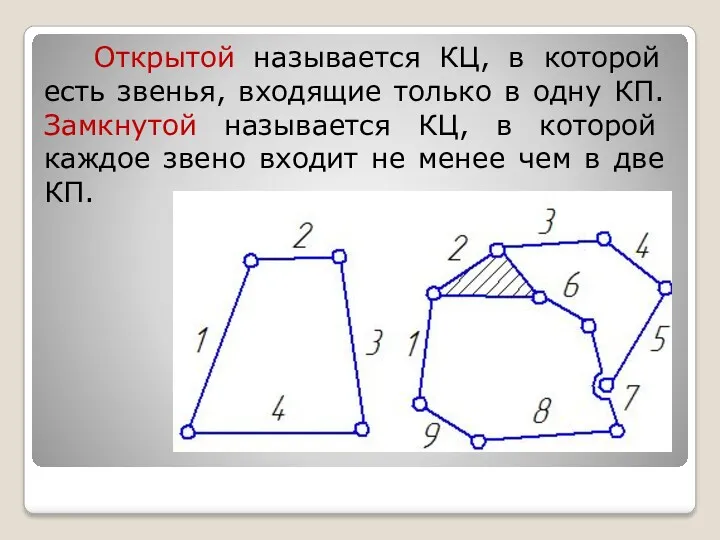
Открытой называется КЦ, в которой есть звенья, входящие только в
Открытой называется КЦ, в которой есть звенья, входящие только в
Если точки всех звеньев могут перемещаться в одной плоскости или
Если точки всех звеньев могут перемещаться в одной плоскости или
Структурные формулы кинематических цепей
Пространственная КЦ
Если в пространственной КЦ n звеньев, то
Структурные формулы кинематических цепей
Пространственная КЦ
Если в пространственной КЦ n звеньев, то
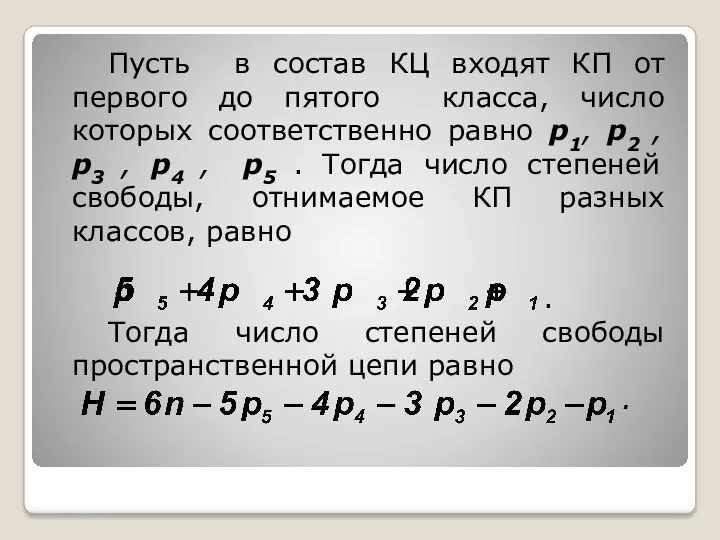
Пусть в состав КЦ входят КП от первого до пятого класса,
Пусть в состав КЦ входят КП от первого до пятого класса,
 Механика жидкостей и газов. Лекция 9
Механика жидкостей и газов. Лекция 9 Проектирование участка механического цеха для производства детали крышка НПРК 711154.013
Проектирование участка механического цеха для производства детали крышка НПРК 711154.013 Буфера в лифтах
Буфера в лифтах Механическая работа. Физика 7 класс
Механическая работа. Физика 7 класс Давление твердых тел. Единицы давления. 7 класс
Давление твердых тел. Единицы давления. 7 класс Разработка участка тормозной системы на предприятии Гринлайт
Разработка участка тормозной системы на предприятии Гринлайт Закон Архимеда. Плавание судов
Закон Архимеда. Плавание судов Электричество и магнетизм
Электричество и магнетизм Атмосферное давление и человек
Атмосферное давление и человек Викторина для 11 класса
Викторина для 11 класса Кинетика химических реакций. (Лекция 8)
Кинетика химических реакций. (Лекция 8) Презентация Проектное обучение
Презентация Проектное обучение Тела с равными массами, изготовленные из разных веществ
Тела с равными массами, изготовленные из разных веществ Фундаментальные концепции физического описания природы
Фундаментальные концепции физического описания природы Ракеты. Какой принцип действия ракет военного назначения?
Ракеты. Какой принцип действия ракет военного назначения? Основы гидравлики
Основы гидравлики Графическое представление движения. Урок физики. 7 класс
Графическое представление движения. Урок физики. 7 класс Законы взаимодействия и движения тел. Своя игра
Законы взаимодействия и движения тел. Своя игра Строение атома
Строение атома Урок № 36 2 Промывочные жидкости
Урок № 36 2 Промывочные жидкости Интерференция, дифракция, поляризация
Интерференция, дифракция, поляризация Силовые характеристики
Силовые характеристики Основные свойства голограмм
Основные свойства голограмм Соотношение неопределённостей Гейзенберга. Волновая функция и её статистический смысл
Соотношение неопределённостей Гейзенберга. Волновая функция и её статистический смысл Физика в познании вещества, поля, пространства и времени.
Физика в познании вещества, поля, пространства и времени. Напряженное состояние нетронутого массива. Тема 8. Лекция № 14
Напряженное состояние нетронутого массива. Тема 8. Лекция № 14 Техническое обслуживание и ремонт кривошипно–шатунного механизма ГАЗ-3102. Эксплуатация контейнерных АЗС
Техническое обслуживание и ремонт кривошипно–шатунного механизма ГАЗ-3102. Эксплуатация контейнерных АЗС Стоячие волны
Стоячие волны