- Кинематический анализ и синтез механизмов

Содержание
- 2. Основные понятия и определения Кинематический анализ механизма - исследование его основных параметров с целью изучения законов
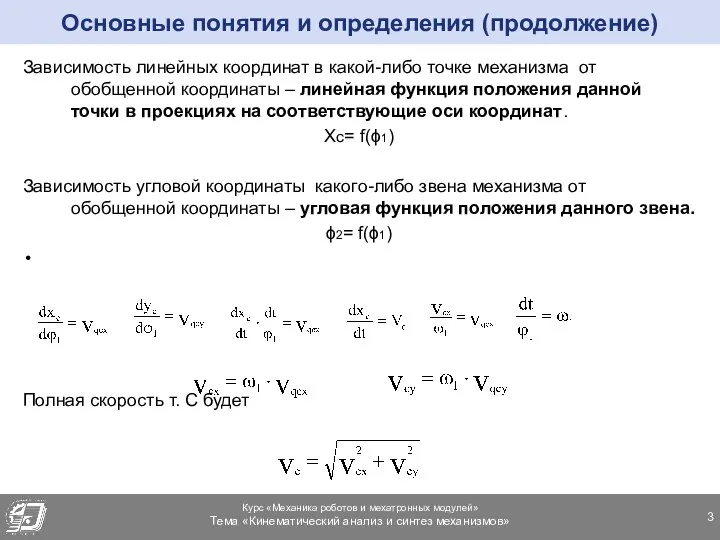
- 3. Основные понятия и определения (продолжение) Зависимость линейных координат в какой-либо точке механизма от обобщенной координаты –
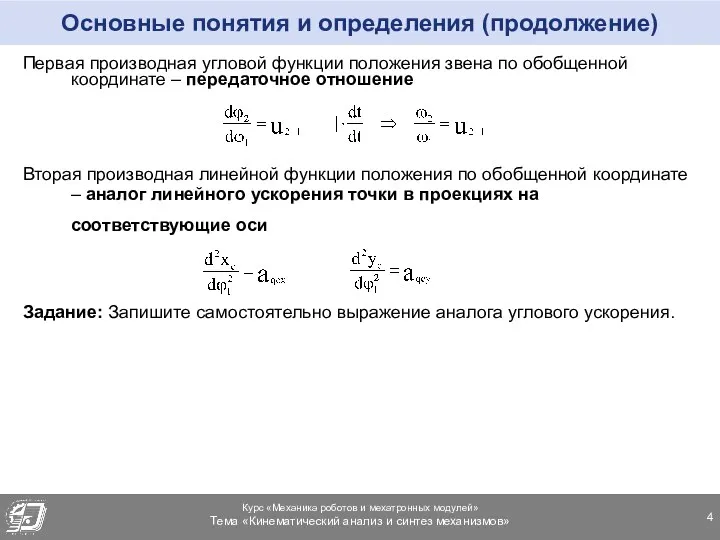
- 4. Основные понятия и определения (продолжение) Первая производная угловой функции положения звена по обобщенной координате – передаточное
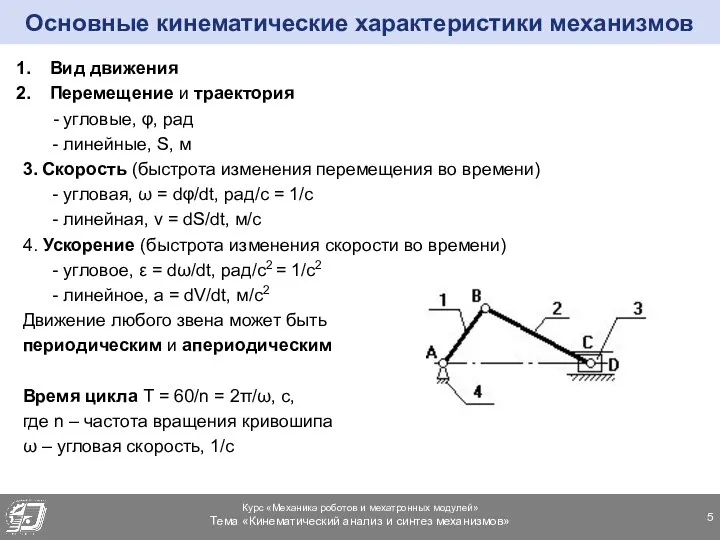
- 5. Основные кинематические характеристики механизмов Вид движения Перемещение и траектория - угловые, φ, рад - линейные, S,
- 6. Кинематический анализ пространственного механизма Первая и основная задача кинематики - определение функции положения. Для пространственных механизмов
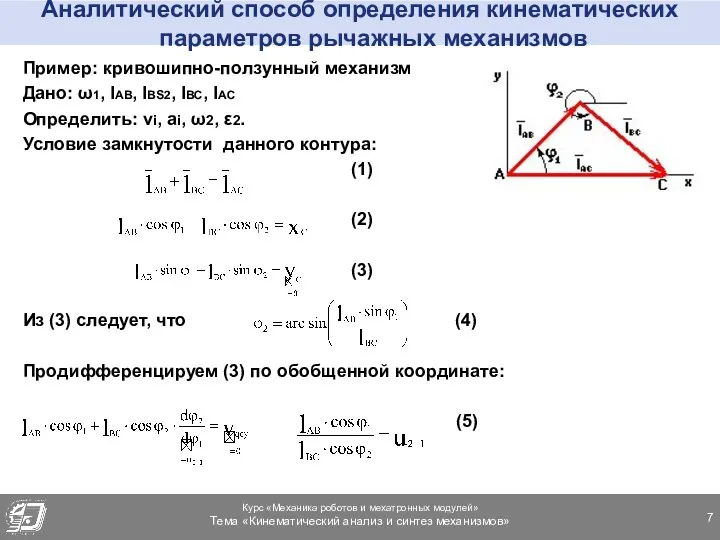
- 7. Аналитический способ определения кинематических параметров рычажных механизмов Пример: кривошипно-ползунный механизм Дано: ω1, lAB, lBS2, lBC, lAC
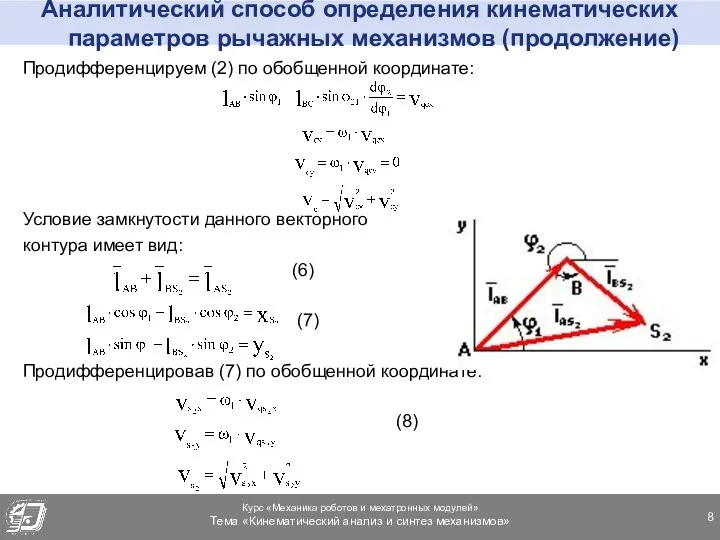
- 8. Аналитический способ определения кинематических параметров рычажных механизмов (продолжение) Продифференцируем (2) по обобщенной координате: Условие замкнутости данного
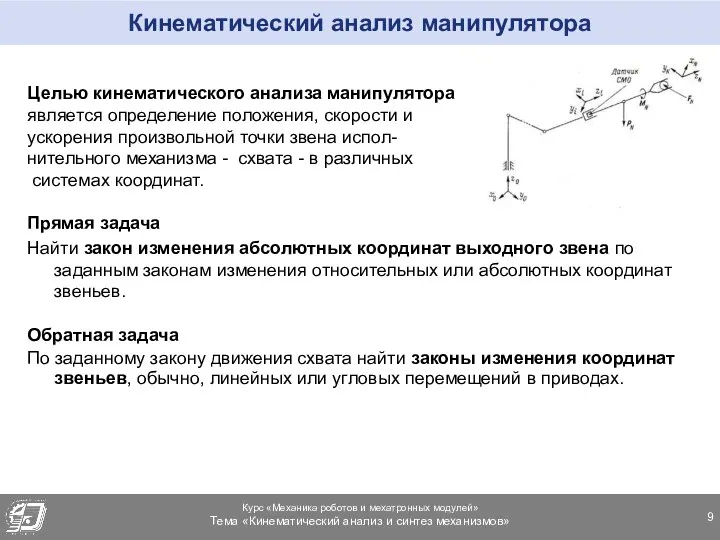
- 9. Кинематический анализ манипулятора Целью кинематического анализа манипулятора является определение положения, скорости и ускорения произвольной точки звена
- 10. Задачи кинематики Первая и основная задача кинематики - определение функции положения. Методы решения для пространственных механизмов:
- 11. Метод Денавита и Хартенберга Оси координат располагаются по следующим правилам: Для звена i ось zi направляется
- 12. Метод Денавита и Хартенберга (продолжение) Согласно принятому методу, каждый переход включает в себя последовательность четырех движений:
- 13. Пример решения прямой задачи кинематики Дана кинематическая схема трехзвенного манипулятора Новая кинематическая схема, учитывающая изменение ориентации
- 14. Пример решения прямой задачи кинематики (продолжение) Угол = 90о а1 = L1 S2 = L2 +
- 15. Пример решения прямой задачи кинематики (продолжение) Матрицы перехода их системы Oi в систему Oi-1 (в общем
- 16. Пример решения прямой задачи кинематики (продолжение) Расширенные матрицы перехода для каждого из сочленений, с учетом значений
- 17. Пример решения прямой задачи кинематики (продолжение) Положение некоторой произвольной точки М в системе координат звена i
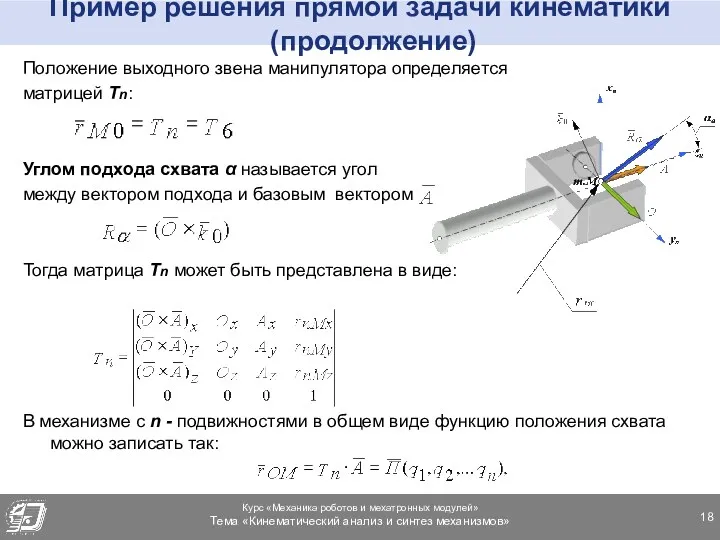
- 18. Пример решения прямой задачи кинематики (продолжение) Положение выходного звена манипулятора определяется матрицей Тn: Углом подхода схвата
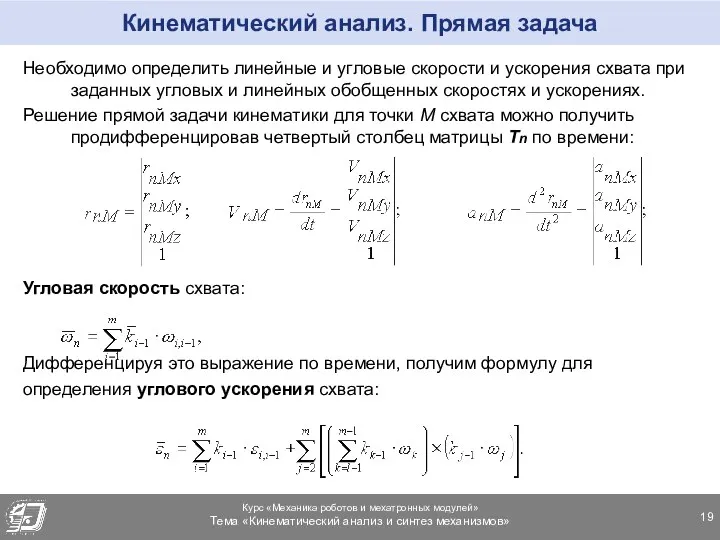
- 19. Кинематический анализ. Прямая задача Необходимо определить линейные и угловые скорости и ускорения схвата при заданных угловых
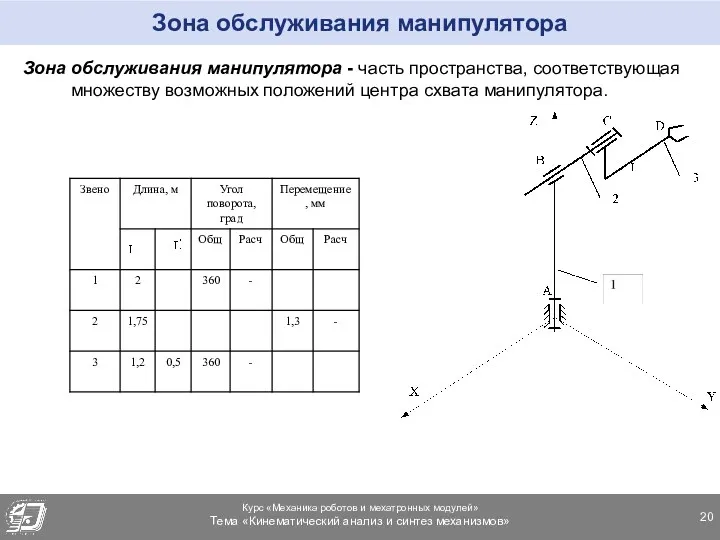
- 20. Зона обслуживания манипулятора Зона обслуживания манипулятора - часть пространства, соответствующая множеству возможных положений центра схвата манипулятора.
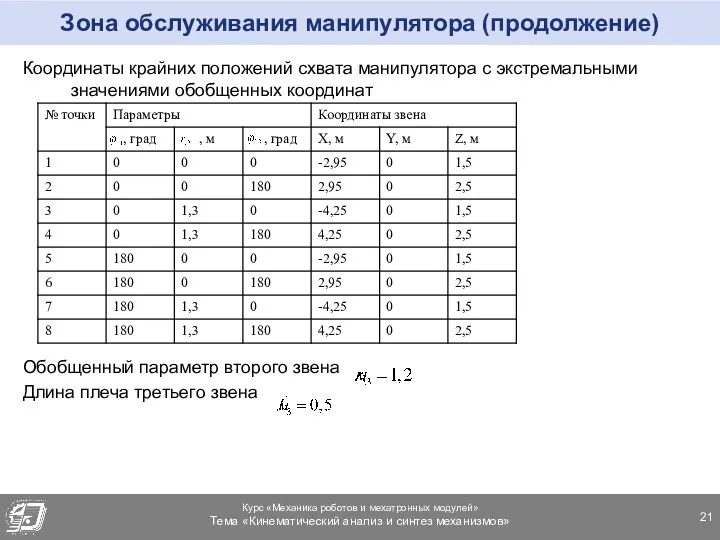
- 21. Зона обслуживания манипулятора (продолжение) Координаты крайних положений схвата манипулятора с экстремальными значениями обобщенных координат Обобщенный параметр
- 22. Зона обслуживания манипулятора (продолжение) Зона обслуживания трехзвенного манипулятора
- 23. Графический метод решения задач кинематики Графический метод основан на непосредственном геометрическом построении планов положений (скоростей, ускорений)
- 24. Метод построения планов скоростей и ускорений Метод построения планов скоростей и ускорений базируется на теоремах Архимеда:
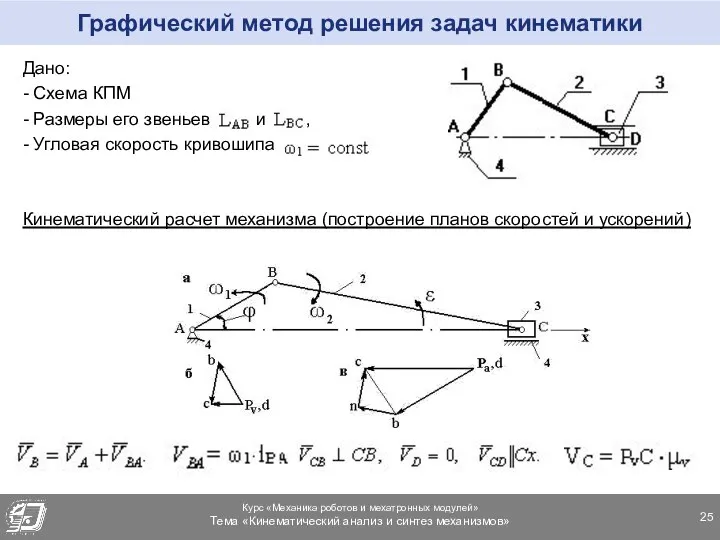
- 25. Графический метод решения задач кинематики Дано: - Схема КПМ - Размеры его звеньев и , -
- 26. Графический метод решения задач кинематики (продолжение) Векторное выражение ускорения точки В: Ускорение точки С получим в
- 27. Прямая задача о скоростях и ускорениях Определение абсолютных величин линейных скоростей и ускорений точек звеньев манипулятора
- 28. Прямая задача о скоростях и ускорениях (продолжение) Определение угловых скоростей и ускорений Проекции единичных векторов описываются
- 29. Прямая задача о скоростях и ускорениях (продолжение) Для звена 2 угловая скорость и ускорение: Векторы относительной
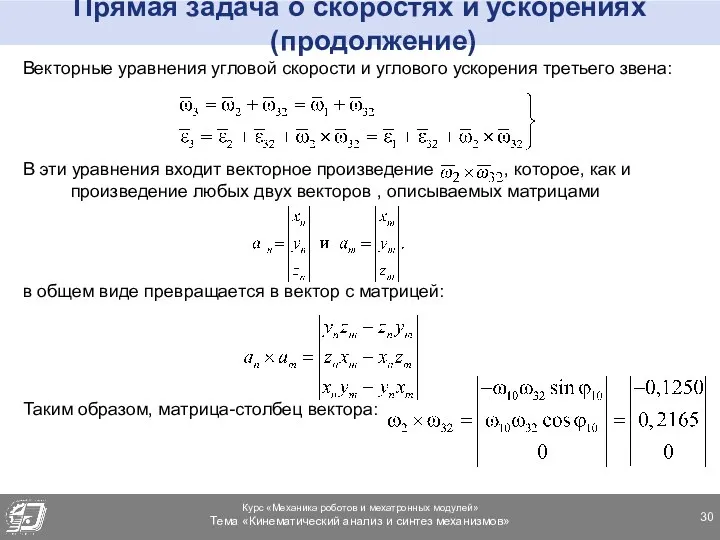
- 30. Прямая задача о скоростях и ускорениях (продолжение) Векторные уравнения угловой скорости и углового ускорения третьего звена:
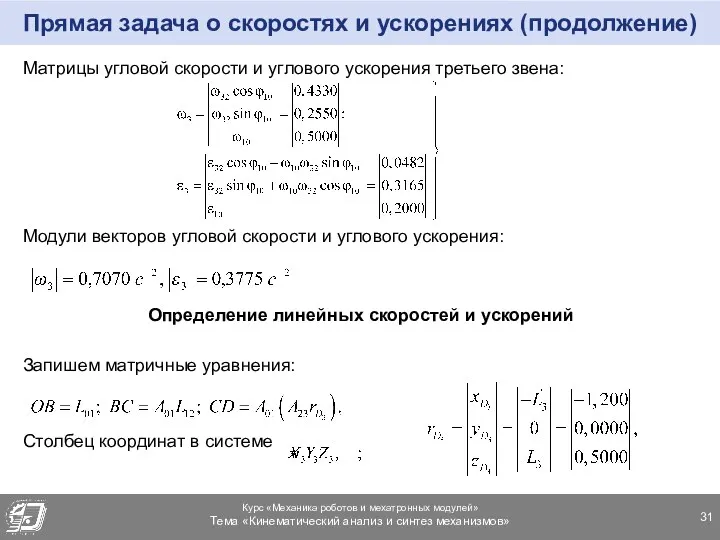
- 31. Прямая задача о скоростях и ускорениях (продолжение) Матрицы угловой скорости и углового ускорения третьего звена: Модули
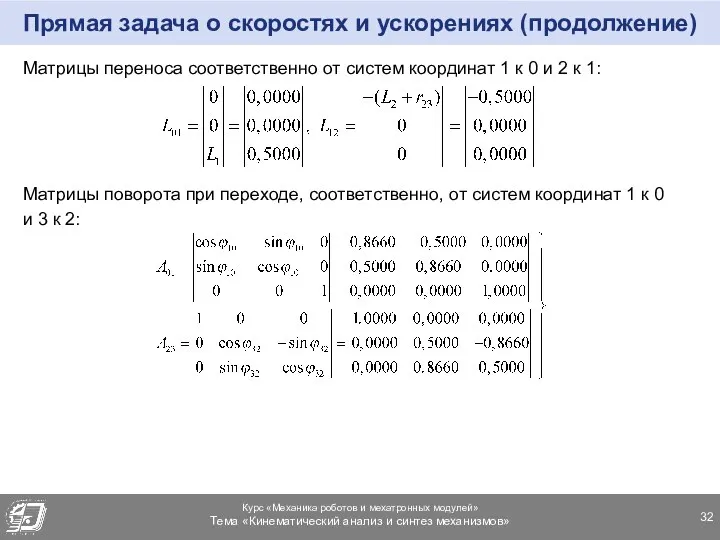
- 32. Прямая задача о скоростях и ускорениях (продолжение) Матрицы переноса соответственно от систем координат 1 к 0
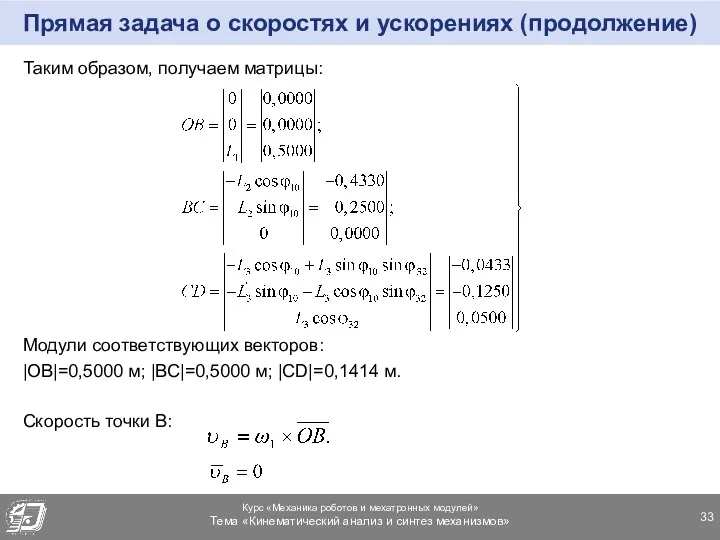
- 33. Прямая задача о скоростях и ускорениях (продолжение) Таким образом, получаем матрицы: Модули соответствующих векторов: |OB|=0,5000 м;
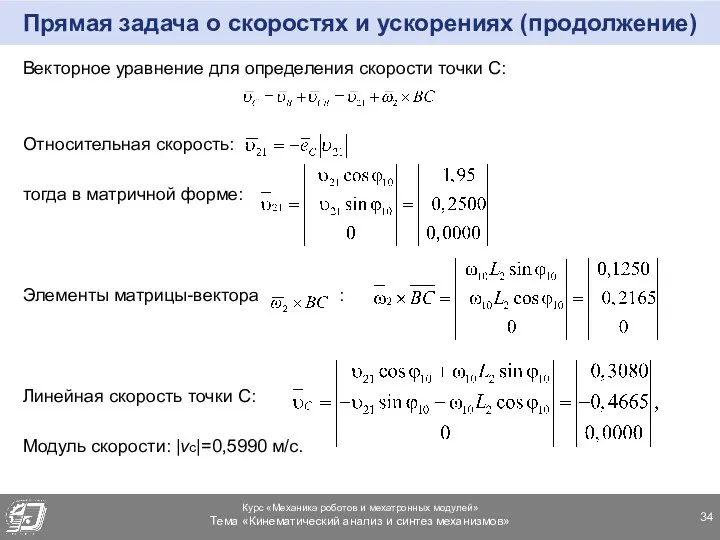
- 34. Прямая задача о скоростях и ускорениях (продолжение) Векторное уравнение для определения скорости точки С: Относительная скорость:
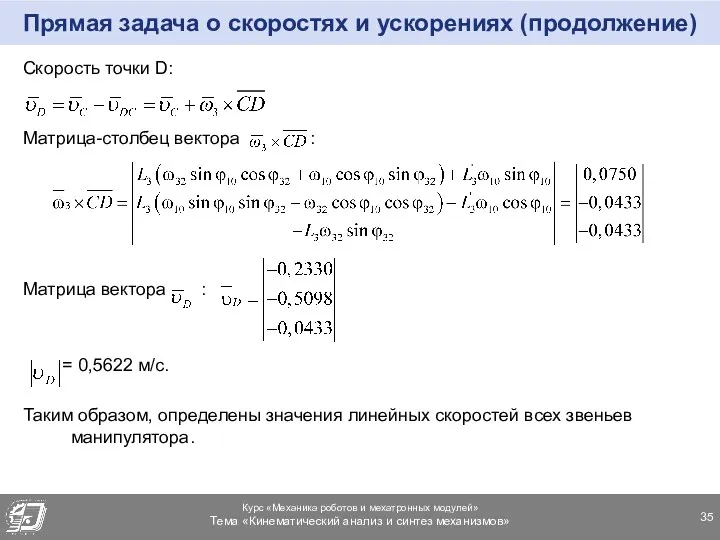
- 35. Прямая задача о скоростях и ускорениях (продолжение) Скорость точки D: Матрица-столбец вектора : Матрица вектора :
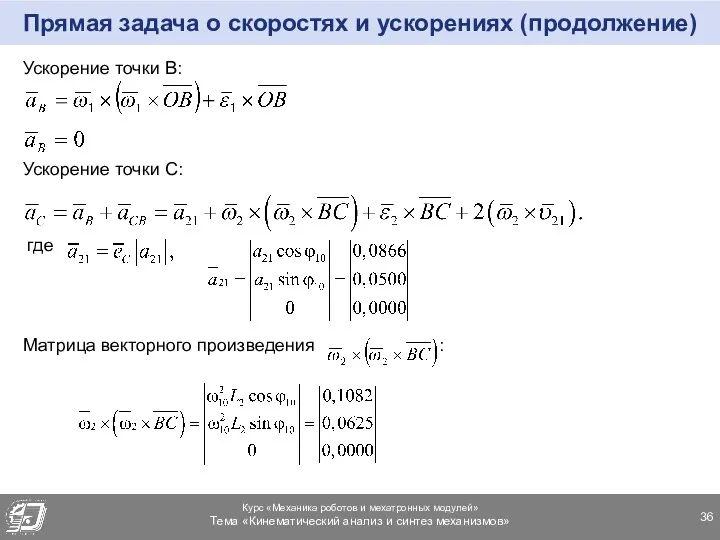
- 36. Прямая задача о скоростях и ускорениях (продолжение) Ускорение точки В: Ускорение точки С: где Матрица векторного
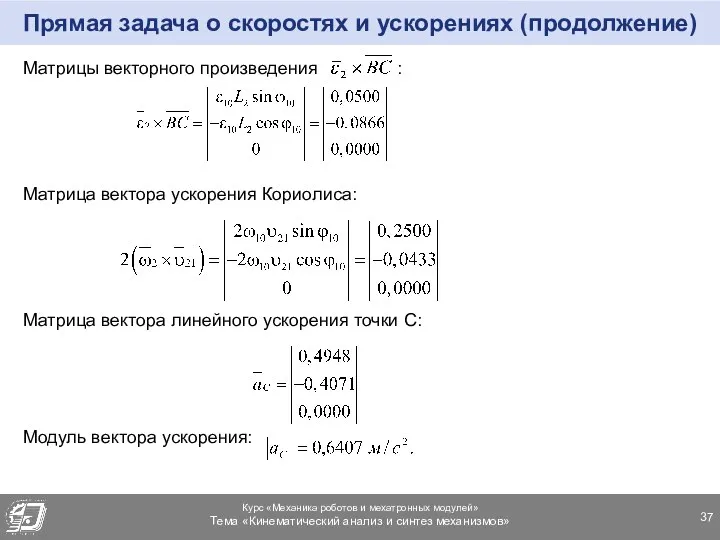
- 37. Прямая задача о скоростях и ускорениях (продолжение) Матрицы векторного произведения : Матрица вектора ускорения Кориолиса: Матрица
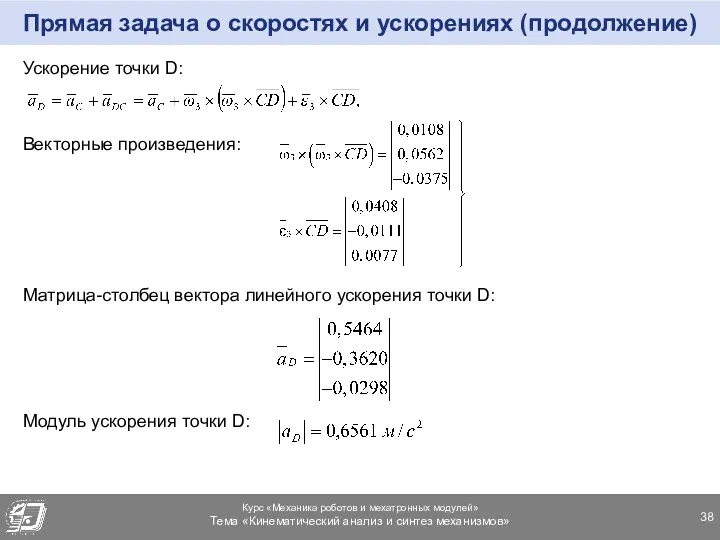
- 38. Прямая задача о скоростях и ускорениях (продолжение) Ускорение точки D: Векторные произведения: Матрица-столбец вектора линейного ускорения
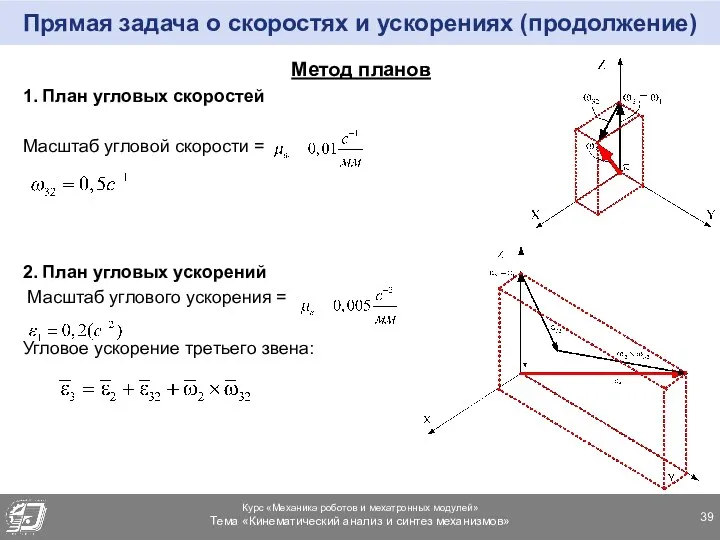
- 39. Прямая задача о скоростях и ускорениях (продолжение) Метод планов 1. План угловых скоростей Масштаб угловой скорости
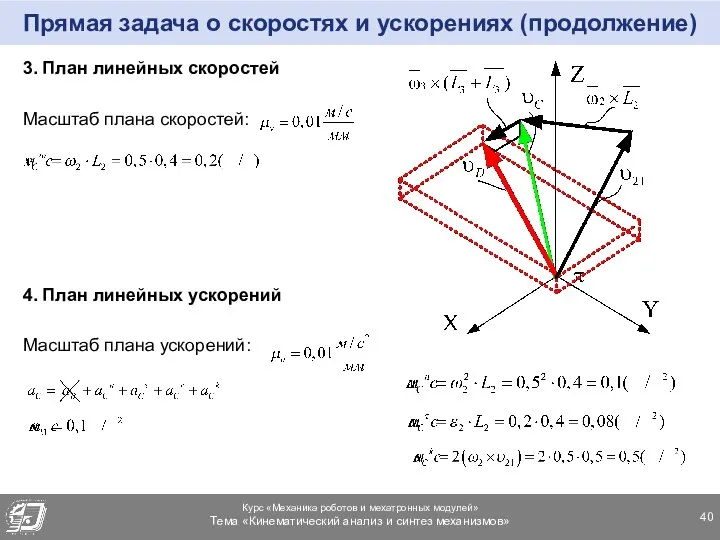
- 40. Прямая задача о скоростях и ускорениях (продолжение) 3. План линейных скоростей Масштаб плана скоростей: 4. План
- 41. Прямая задача о скоростях и ускорениях (продолжение)
- 42. Кинематический синтез механизмов Кинематический синтез механизма – проектирование нового механизма. Этапы кинематического синтеза: 1. Выбор схемы
- 43. Синтез механизмов При синтезе часто решается задача оптимального проектирования конструкции, когда находятся необходимые показатели работы машины
- 44. Заключение Кинематический анализ механизма - исследование его основных параметров с целью изучения законов изменения перемещения, скорости
- 46. Скачать презентацию
Основные понятия и определения
Кинематический анализ механизма - исследование его основных параметров
Основные понятия и определения
Кинематический анализ механизма - исследование его основных параметров
Основные понятия и определения (продолжение)
Зависимость линейных координат в какой-либо точке механизма
Основные понятия и определения (продолжение)
Зависимость линейных координат в какой-либо точке механизма
Основные понятия и определения (продолжение)
Первая производная угловой функции положения звена по
Основные понятия и определения (продолжение)
Первая производная угловой функции положения звена по
Основные кинематические характеристики механизмов
Вид движения
Перемещение и траектория
- угловые, φ, рад
Основные кинематические характеристики механизмов
Вид движения
Перемещение и траектория
- угловые, φ, рад
Кинематический анализ пространственного механизма
Первая и основная задача кинематики - определение функции
Кинематический анализ пространственного механизма
Первая и основная задача кинематики - определение функции
Аналитический способ определения кинематических параметров рычажных механизмов
Пример: кривошипно-ползунный механизм
Дано: ω1, lAB,
Аналитический способ определения кинематических параметров рычажных механизмов
Пример: кривошипно-ползунный механизм
Дано: ω1, lAB,
Аналитический способ определения кинематических параметров рычажных механизмов (продолжение)
Продифференцируем (2) по обобщенной
Аналитический способ определения кинематических параметров рычажных механизмов (продолжение)
Продифференцируем (2) по обобщенной
Кинематический анализ манипулятора
Целью кинематического анализа манипулятора
является определение положения, скорости и
ускорения произвольной
Кинематический анализ манипулятора
Целью кинематического анализа манипулятора
является определение положения, скорости и
ускорения произвольной
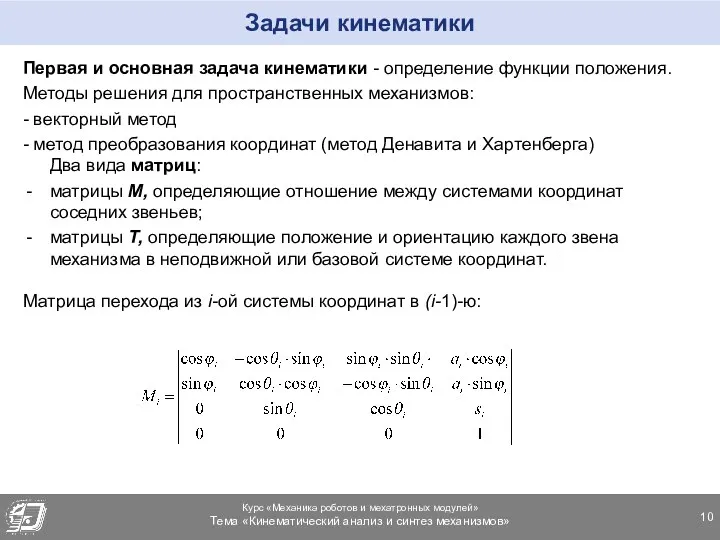
Задачи кинематики
Первая и основная задача кинематики - определение функции положения.
Методы
Задачи кинематики
Первая и основная задача кинематики - определение функции положения.
Методы
Метод Денавита и Хартенберга
Оси координат располагаются по следующим правилам:
Для звена i
Метод Денавита и Хартенберга
Оси координат располагаются по следующим правилам:
Для звена i
Метод Денавита и Хартенберга (продолжение)
Согласно принятому методу, каждый переход включает
Метод Денавита и Хартенберга (продолжение)
Согласно принятому методу, каждый переход включает
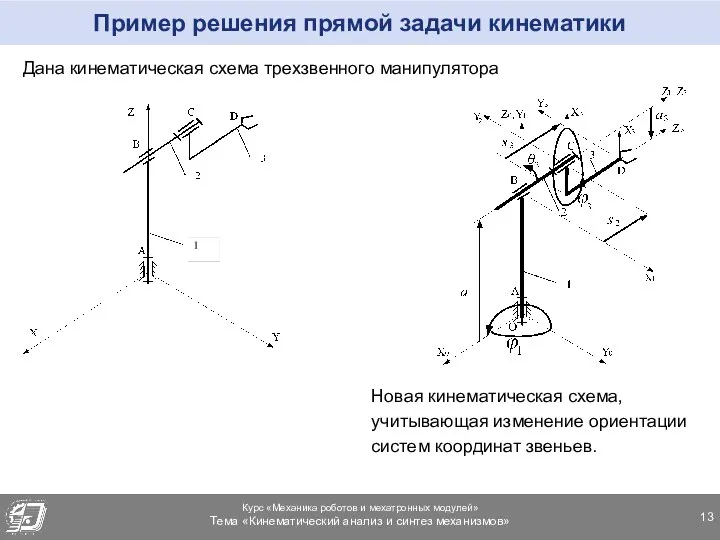
Пример решения прямой задачи кинематики
Дана кинематическая схема трехзвенного манипулятора
Новая кинематическая схема,
Пример решения прямой задачи кинематики
Дана кинематическая схема трехзвенного манипулятора
Новая кинематическая схема,
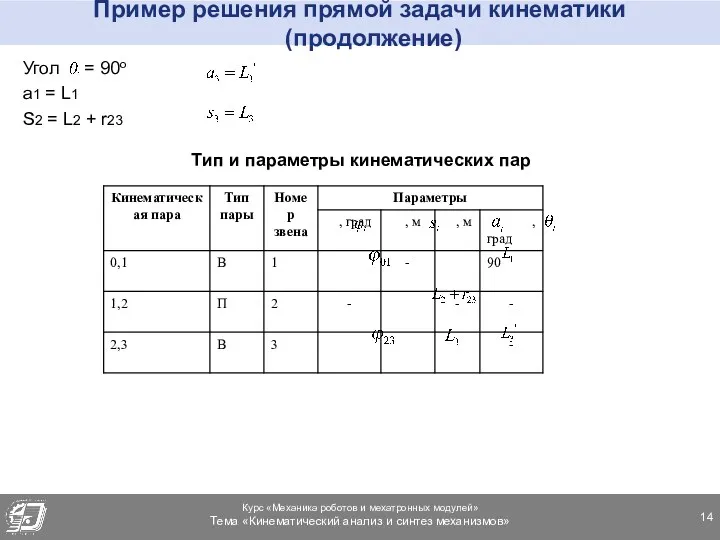
Пример решения прямой задачи кинематики (продолжение)
Угол = 90о
а1 = L1
S2 =
Пример решения прямой задачи кинематики (продолжение)
Угол = 90о
а1 = L1
S2 =
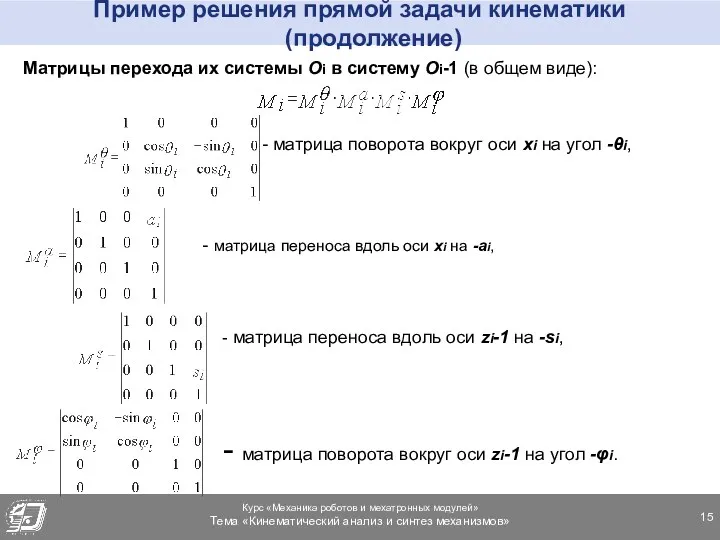
Пример решения прямой задачи кинематики (продолжение)
Матрицы перехода их системы Oi в
Пример решения прямой задачи кинематики (продолжение)
Матрицы перехода их системы Oi в
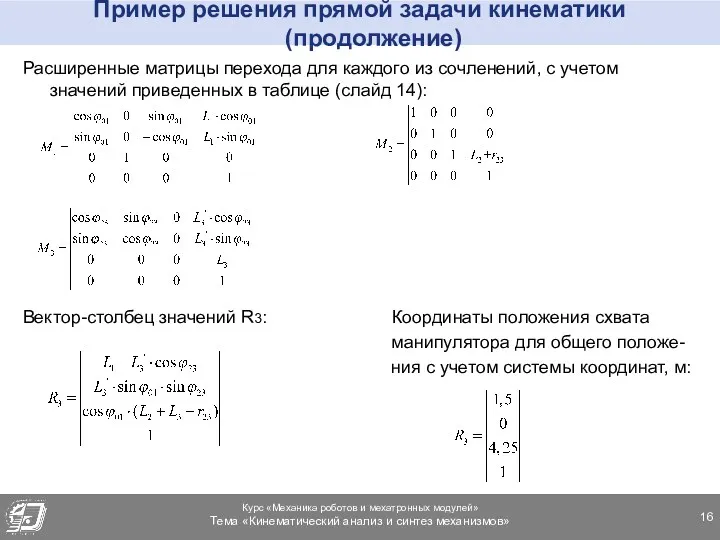
Пример решения прямой задачи кинематики (продолжение)
Расширенные матрицы перехода для каждого из
Пример решения прямой задачи кинематики (продолжение)
Расширенные матрицы перехода для каждого из
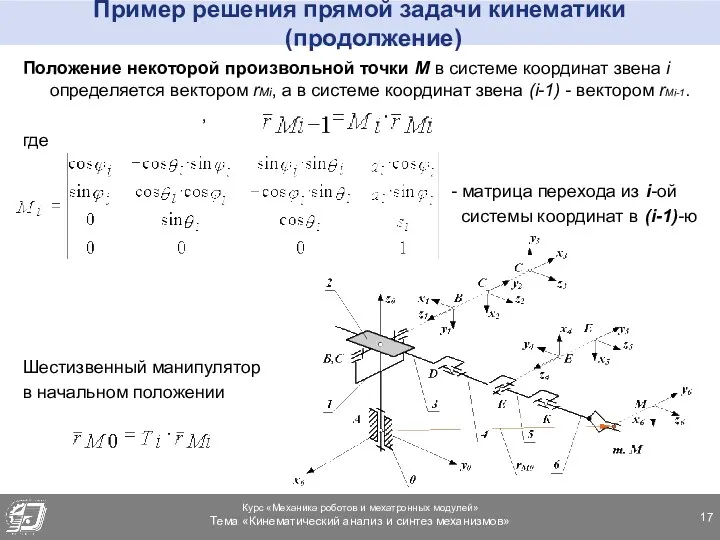
Пример решения прямой задачи кинематики (продолжение)
Положение некоторой произвольной точки М в
Пример решения прямой задачи кинематики (продолжение)
Положение некоторой произвольной точки М в
Пример решения прямой задачи кинематики (продолжение)
Положение выходного звена манипулятора определяется
матрицей Тn:
Пример решения прямой задачи кинематики (продолжение)
Положение выходного звена манипулятора определяется
матрицей Тn:
Кинематический анализ. Прямая задача
Необходимо определить линейные и угловые скорости и ускорения
Кинематический анализ. Прямая задача
Необходимо определить линейные и угловые скорости и ускорения
Зона обслуживания манипулятора
Зона обслуживания манипулятора - часть пространства, соответствующая множеству возможных
Зона обслуживания манипулятора
Зона обслуживания манипулятора - часть пространства, соответствующая множеству возможных
Зона обслуживания манипулятора (продолжение)
Координаты крайних положений схвата манипулятора с экстремальными значениями
Зона обслуживания манипулятора (продолжение)
Координаты крайних положений схвата манипулятора с экстремальными значениями
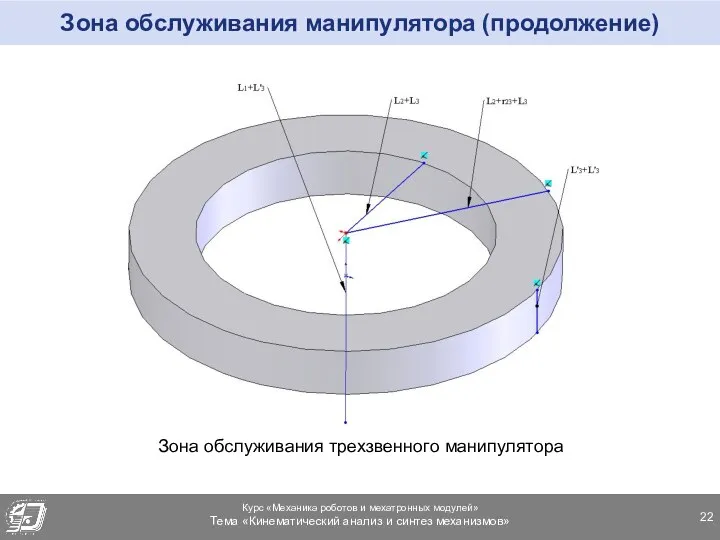
Зона обслуживания манипулятора (продолжение)
Зона обслуживания трехзвенного манипулятора
Зона обслуживания манипулятора (продолжение)
Зона обслуживания трехзвенного манипулятора
Графический метод решения задач кинематики
Графический метод основан на непосредственном геометрическом построении
Графический метод решения задач кинематики
Графический метод основан на непосредственном геометрическом построении
Метод построения планов скоростей и ускорений
Метод построения планов скоростей и ускорений
Метод построения планов скоростей и ускорений
Метод построения планов скоростей и ускорений
Графический метод решения задач кинематики
Дано:
- Схема КПМ
- Размеры его звеньев и
Графический метод решения задач кинематики
Дано:
- Схема КПМ
- Размеры его звеньев и
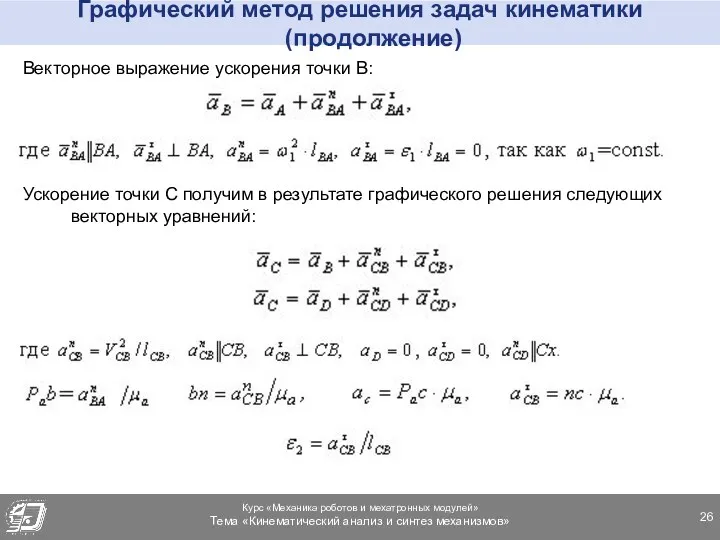
Графический метод решения задач кинематики (продолжение)
Векторное выражение ускорения точки В:
Ускорение точки
Графический метод решения задач кинематики (продолжение)
Векторное выражение ускорения точки В:
Ускорение точки
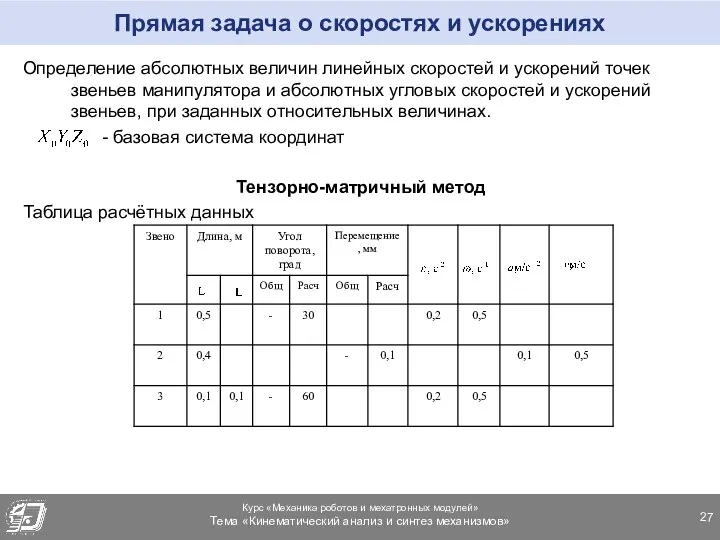
Прямая задача о скоростях и ускорениях
Определение абсолютных величин линейных скоростей и
Прямая задача о скоростях и ускорениях
Определение абсолютных величин линейных скоростей и
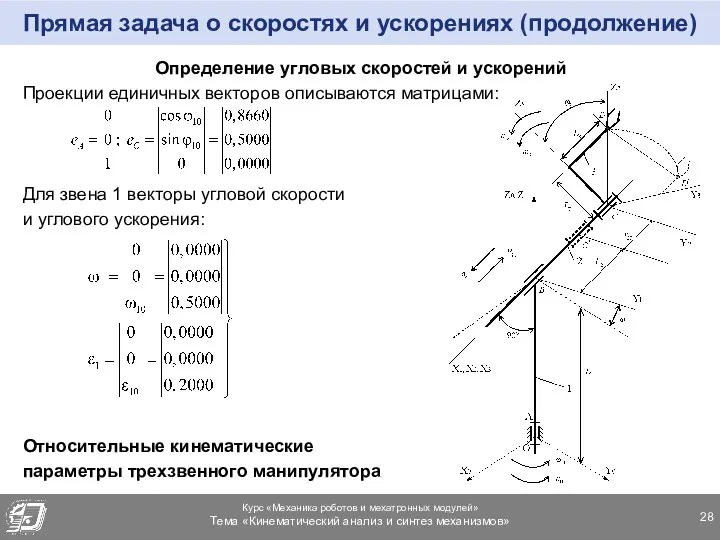
Прямая задача о скоростях и ускорениях (продолжение)
Определение угловых скоростей и ускорений
Проекции
Прямая задача о скоростях и ускорениях (продолжение)
Определение угловых скоростей и ускорений
Проекции
Прямая задача о скоростях и ускорениях (продолжение)
Для звена 2 угловая скорость
Прямая задача о скоростях и ускорениях (продолжение)
Для звена 2 угловая скорость
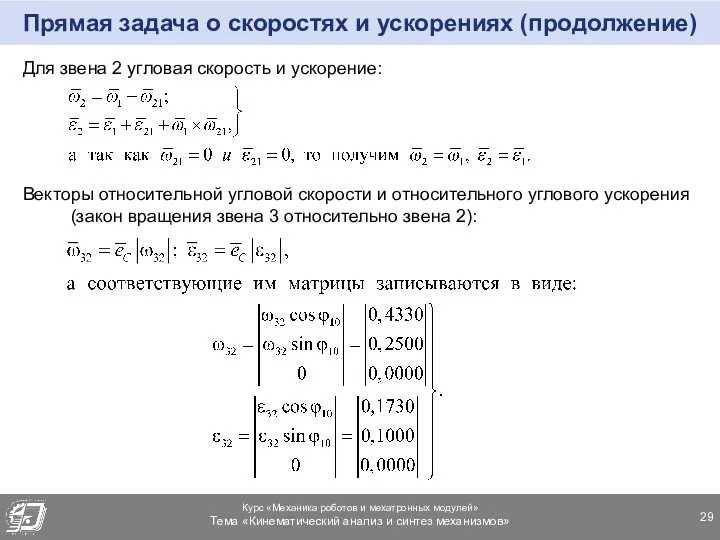
Прямая задача о скоростях и ускорениях (продолжение)
Векторные уравнения угловой скорости и
Прямая задача о скоростях и ускорениях (продолжение)
Векторные уравнения угловой скорости и
Прямая задача о скоростях и ускорениях (продолжение)
Матрицы угловой скорости и углового
Прямая задача о скоростях и ускорениях (продолжение)
Матрицы угловой скорости и углового
Прямая задача о скоростях и ускорениях (продолжение)
Матрицы переноса соответственно от систем
Прямая задача о скоростях и ускорениях (продолжение)
Матрицы переноса соответственно от систем
Прямая задача о скоростях и ускорениях (продолжение)
Таким образом, получаем матрицы:
Модули соответствующих
Прямая задача о скоростях и ускорениях (продолжение)
Таким образом, получаем матрицы:
Модули соответствующих
Прямая задача о скоростях и ускорениях (продолжение)
Векторное уравнение для определения скорости
Прямая задача о скоростях и ускорениях (продолжение)
Векторное уравнение для определения скорости
Прямая задача о скоростях и ускорениях (продолжение)
Скорость точки D:
Матрица-столбец вектора :
Матрица
Прямая задача о скоростях и ускорениях (продолжение)
Скорость точки D:
Матрица-столбец вектора :
Матрица
Прямая задача о скоростях и ускорениях (продолжение)
Ускорение точки В:
Ускорение точки С:
где
Прямая задача о скоростях и ускорениях (продолжение)
Ускорение точки В:
Ускорение точки С:
где
Прямая задача о скоростях и ускорениях (продолжение)
Матрицы векторного произведения :
Матрица вектора
Прямая задача о скоростях и ускорениях (продолжение)
Матрицы векторного произведения :
Матрица вектора
Прямая задача о скоростях и ускорениях (продолжение)
Ускорение точки D:
Векторные произведения:
Матрица-столбец вектора
Прямая задача о скоростях и ускорениях (продолжение)
Ускорение точки D:
Векторные произведения:
Матрица-столбец вектора
Прямая задача о скоростях и ускорениях (продолжение)
Метод планов
1. План угловых скоростей
Масштаб
Прямая задача о скоростях и ускорениях (продолжение)
Метод планов
1. План угловых скоростей
Масштаб
Прямая задача о скоростях и ускорениях (продолжение)
3. План линейных скоростей
Масштаб плана
Прямая задача о скоростях и ускорениях (продолжение)
3. План линейных скоростей
Масштаб плана
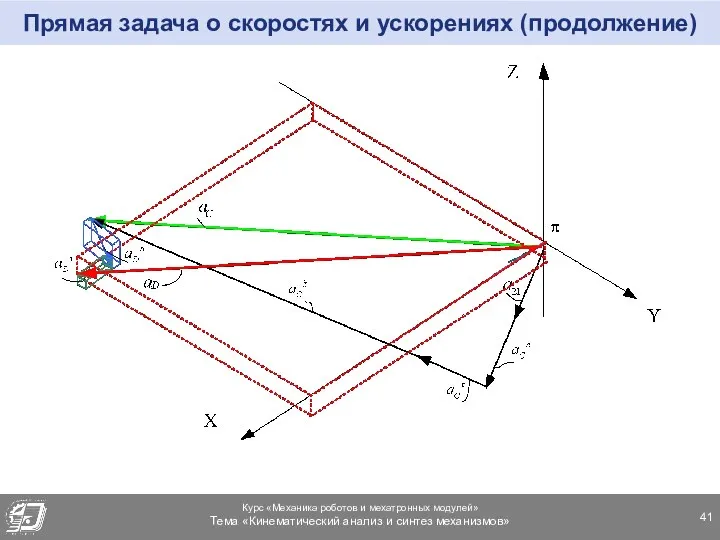
Прямая задача о скоростях и ускорениях (продолжение)
Прямая задача о скоростях и ускорениях (продолжение)
Кинематический синтез механизмов
Кинематический синтез механизма – проектирование нового механизма.
Этапы кинематического
Кинематический синтез механизмов
Кинематический синтез механизма – проектирование нового механизма.
Этапы кинематического
Синтез механизмов
При синтезе часто решается задача оптимального проектирования конструкции, когда находятся
Синтез механизмов
При синтезе часто решается задача оптимального проектирования конструкции, когда находятся
Заключение
Кинематический анализ механизма - исследование его основных параметров с целью изучения
Заключение
Кинематический анализ механизма - исследование его основных параметров с целью изучения
 Зачем парикмахеру знания математики и физики
Зачем парикмахеру знания математики и физики Атомная энергия
Атомная энергия Влияние Земли на работу антенн для радиосвязи поверхностными волнами. Лекция 3+1 (№15)
Влияние Земли на работу антенн для радиосвязи поверхностными волнами. Лекция 3+1 (№15) Явление инерции
Явление инерции Схема работы акустической системы
Схема работы акустической системы Функциональная магнитоэлектроника. УФЭ (5)
Функциональная магнитоэлектроника. УФЭ (5) Лампы накаливания
Лампы накаливания Организация работ по диагностированию, техническому обслуживанию и ремонту ЗИЛ-5301. Процесс ремонта переднего моста
Организация работ по диагностированию, техническому обслуживанию и ремонту ЗИЛ-5301. Процесс ремонта переднего моста Современные методы предотвращения явления помпажа в центробежных компрессорах
Современные методы предотвращения явления помпажа в центробежных компрессорах Подготовка к контрольной работе по теме Динамика
Подготовка к контрольной работе по теме Динамика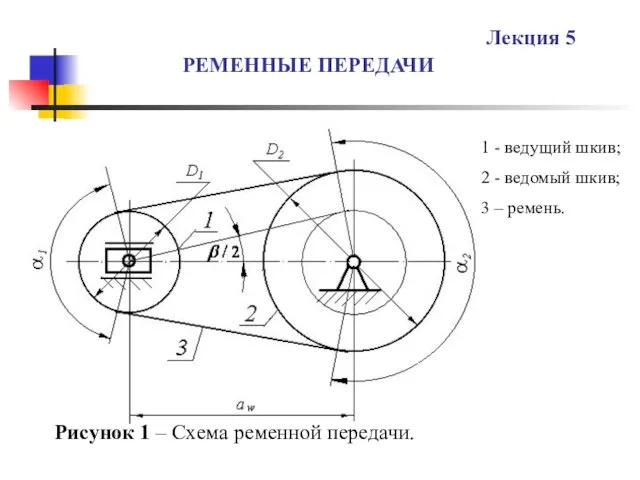 Ременные передачи. (Лекция 5)
Ременные передачи. (Лекция 5)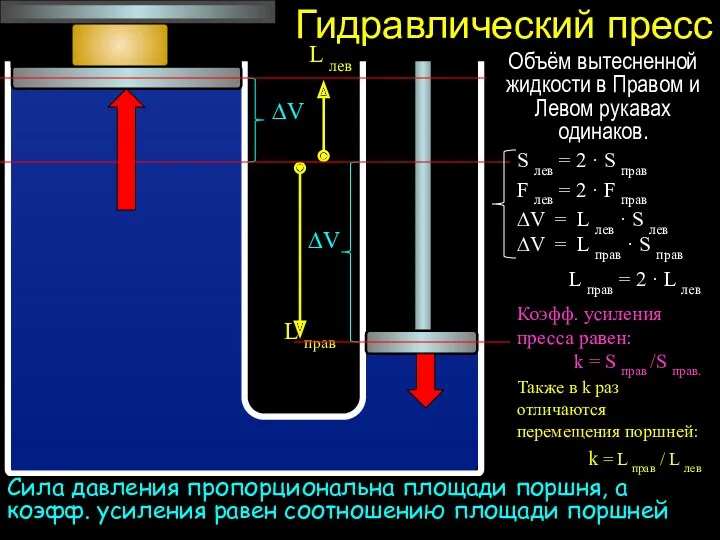 Гидравлический пресс
Гидравлический пресс Ворот. Лебёдка
Ворот. Лебёдка Эксплуатация оборудования для расточки и хонингования цилиндров двигателя автомобиля (урок 16)
Эксплуатация оборудования для расточки и хонингования цилиндров двигателя автомобиля (урок 16) Классификация нелинейных элементов и цепей
Классификация нелинейных элементов и цепей Вихревое электрическое поле. Самоиндукция
Вихревое электрическое поле. Самоиндукция Решение задач по теме: Основы МКТ
Решение задач по теме: Основы МКТ Открытие и применение закона всемирного тяготения
Открытие и применение закона всемирного тяготения Электрические переходы
Электрические переходы Малоугловое рассеяние нейтронов и рентгеновских лучей в неупорядоченных средах (SANS, USANS и SAXS)
Малоугловое рассеяние нейтронов и рентгеновских лучей в неупорядоченных средах (SANS, USANS и SAXS) Свободные затухающие колебания. Дифференциальное уравнение затухающих колебаний
Свободные затухающие колебания. Дифференциальное уравнение затухающих колебаний Детали машин и основы конструирования. Общие сведения. (Раздел 1)
Детали машин и основы конструирования. Общие сведения. (Раздел 1) Механические передачи
Механические передачи Презентация по физике Момент силы. Применение равновесия рычага к блоку 7 класс.
Презентация по физике Момент силы. Применение равновесия рычага к блоку 7 класс. Явления переноса (продолжение). Реальные газы
Явления переноса (продолжение). Реальные газы Техническое обслуживание электромеханических исполнительных механизмов
Техническое обслуживание электромеханических исполнительных механизмов Електромагнітні хвилі
Електромагнітні хвилі Обобщающий урок по теме Электрический ток 8 класс
Обобщающий урок по теме Электрический ток 8 класс