- Кинематическое исследование механизмов построением планов скоростей и ускорений

Содержание
- 2. Построение кинематической схемы кривошипно-ползунного механизма Положение ползуна в верхней мертвой точка Положение ползуна в нижней мертвой
- 3. Построение плана скоростей кривошипно-ползунного механизма a b Ведущее звено (кривошипа) совершает вращательное движение относительно О и
- 4. Свойства плана скоростей Отрезки плана скоростей, проходящие через полюс, изображают абсолютные скорости. Направление абсолютных скоростей всегда
- 5. Построение плана ускорений КПМ a Нормальное ускорение ведущего звена Нормальное ускорение направлено из точки к центру
- 7. Скачать презентацию

Построение кинематической схемы кривошипно-ползунного механизма
Положение ползуна в верхней мертвой точка
Положение ползуна
Построение кинематической схемы кривошипно-ползунного механизма
Положение ползуна в верхней мертвой точка
Положение ползуна

Построение плана скоростей кривошипно-ползунного механизма
a
b
Ведущее звено (кривошипа) совершает вращательное движение относительно
Построение плана скоростей кривошипно-ползунного механизма
a
b
Ведущее звено (кривошипа) совершает вращательное движение относительно

Свойства плана скоростей
Отрезки плана скоростей, проходящие через полюс, изображают абсолютные скорости.
Свойства плана скоростей
Отрезки плана скоростей, проходящие через полюс, изображают абсолютные скорости.

Построение плана ускорений КПМ
a
Нормальное ускорение ведущего звена
Нормальное ускорение направлено из
Построение плана ускорений КПМ
a
Нормальное ускорение ведущего звена
Нормальное ускорение направлено из
 Методы и средства измерения частоты, временных интервалов и фазового сдвига
Методы и средства измерения частоты, временных интервалов и фазового сдвига Простые механизмы
Простые механизмы Самостоятельная робота на уроках физики
Самостоятельная робота на уроках физики Imitation of low voltage DC arc
Imitation of low voltage DC arc Оборудование для заземления нейтрали в сетях 6-35 кВ
Оборудование для заземления нейтрали в сетях 6-35 кВ Вес тела. Единицы силы. Связь между силой тяжести и массой тела. Физика. 7 класс
Вес тела. Единицы силы. Связь между силой тяжести и массой тела. Физика. 7 класс Портфолио учителя физики Бушмакиной Е. С.
Портфолио учителя физики Бушмакиной Е. С. Разработка урока по теме Изучение колебаний математического маятника
Разработка урока по теме Изучение колебаний математического маятника Устройство и принцип работы воздухораспределителя 483
Устройство и принцип работы воздухораспределителя 483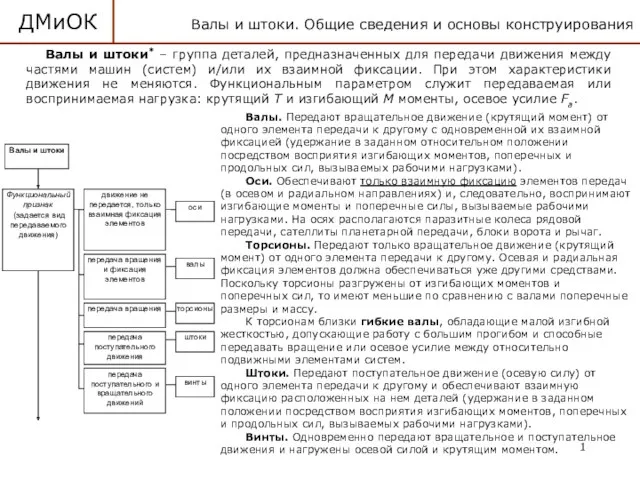 Детали машин и основы конструирования. Валы и штоки. (Лекция 11)
Детали машин и основы конструирования. Валы и штоки. (Лекция 11) Плотность вещества
Плотность вещества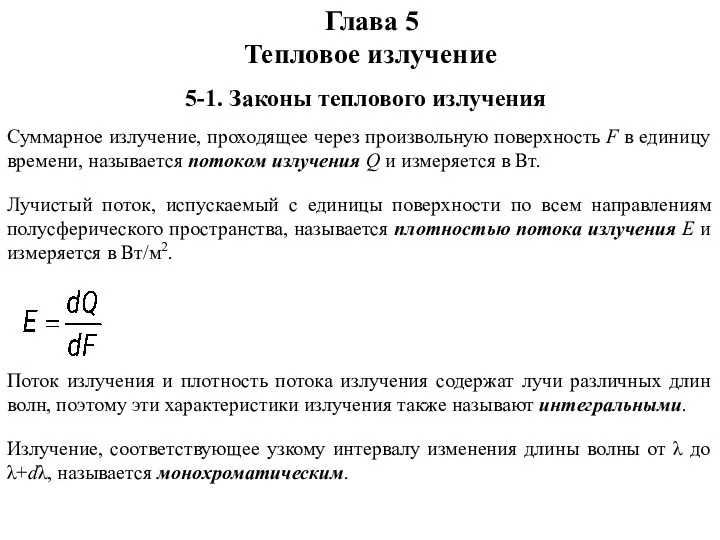 Тепловое излучение. Глава 5
Тепловое излучение. Глава 5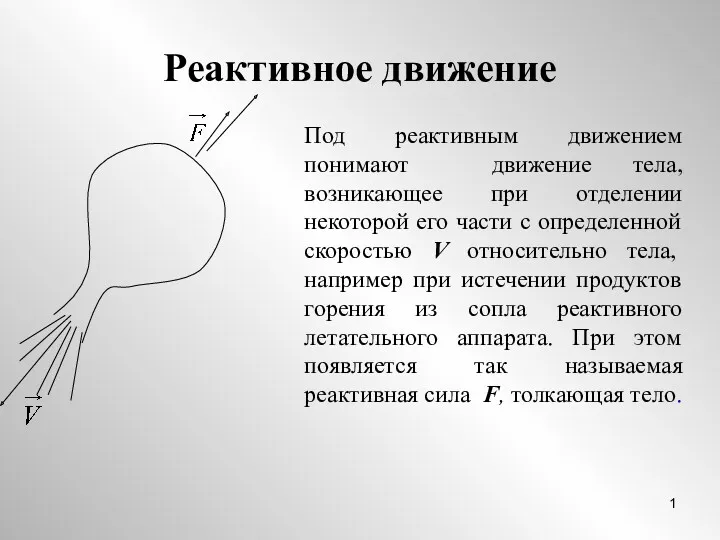 Реактивное движение
Реактивное движение Корабельные гироскопические системы. (Тема 2)
Корабельные гироскопические системы. (Тема 2) Температура
Температура Умови плавання тіл
Умови плавання тіл Углекислотные лазеры высокого и низкого давления
Углекислотные лазеры высокого и низкого давления Лекція №5. Закон збереження імпульсу
Лекція №5. Закон збереження імпульсу Взаємодія тіл. Імпульс. Закон збереження імпульсу
Взаємодія тіл. Імпульс. Закон збереження імпульсу Магнитное поле. Действие магнитного поля на движущийся электрический заряд
Магнитное поле. Действие магнитного поля на движущийся электрический заряд Современные приборы измерения температуры
Современные приборы измерения температуры Измерение активного сопротивления обмоток постоянному току
Измерение активного сопротивления обмоток постоянному току Законы отражения
Законы отражения Newton’s Laws of Motion
Newton’s Laws of Motion Технологический процесс проведения опрессовки форсунок судового двигателя
Технологический процесс проведения опрессовки форсунок судового двигателя Гамма-излучение
Гамма-излучение Спектрально-люминесцентные свойства кристаллов стабилизированного диоксида циркония, активированных ионами
Спектрально-люминесцентные свойства кристаллов стабилизированного диоксида циркония, активированных ионами Оптическое явление атмосферы гало
Оптическое явление атмосферы гало