- Кинематика

Содержание
- 2. Основные определения Механика делится на три раздела: кинематику, динамику, статику. Кинематика изучает движение тел, не рассматривая
- 3. Идеальный объект движения Идеальной моделью для описания поступательного движения тела является материальная точка.(2) модель материальной точки
- 4. Система отсчёта Движение тел происходит в пространстве и во времени и может рассматриваться относительно различных систем
- 5. Векторный способ описания движения При векторном способе описания движения используются следующие векторные величины: радиус- вектор точки
- 6. Радиус-вектор – это вектор , направленный из начала отсчета к месту, где находится материальная точка Радиус-вектор
- 7. Траектория – линия, которую описывает при своём движении материальная точка Перемещение – вектор, направленный из начального
- 8. При уменьшении промежутка времени направление перемещения стремится к направлению касательной к траектории, длина перемещения (длина хорды)
- 9. Средней скоростью точки за некоторый промежуток времени называется отношение перемещения за этот промежуток к длительности промежутка
- 10. Мгновенной скоростью точки в некоторый момент времени называется предел, к которому стремится средняя скорость при уменьшении
- 11. При движении точки может изменяться не только её положение, но и скорость. Причём изменение может быть
- 12. Два способа изменения скорости по величине и направлению можно проиллюстрировать : - как изменение показаний спидометра
- 13. Приведенные слева рисунки показывают, что, как и любая векторная величина, скорость может изменяться: - по величине,
- 14. Ускорение - физическая величина, характеризующая изменение скорости Мгновенным ускорением точки в некоторый момент времени называется вектор
- 15. Ускорение, связанное с изменением величины скорости, называется тангенциальным (линейным, касательным). Оно направлено по касательной к траектории
- 16. Ускорение, связанное с изменением направления скорости, называется нормальным (центростремительным, радиальным). Оно направлено перпендикулярно направлению вектора мгновенной
- 17. При движении точки с переменной скоростью по криволинейной траектории в каждый момент времени движение можно представить
- 18. Таким образом, полное ускорение при криволинейном движении с переменной скоростью может быть представлено в виде векторной
- 19. При заданных ускорении и начальной скорости скорость в любой момент времени вычисляется по формуле При заданных
- 20. В частном случае движения с постоянным ускорением : скорость в любой момент времени вычисляется по формуле
- 21. Координатный способ описания движения При координатном способе описания движения используются проекции следующих векторных характеристик движения на
- 22. Координаты точки А (x, y, z) – это проекции радиуса- вектора точки А на координатные оси
- 23. Связь между векторными характеристиками движения и координатными для декартовой прямоугольной системы координат Нижними индексами в двух
- 24. Все формулы для координатного способа легко получаются из соответствующих векторных определений Координатный способ описания движения
- 25. Физические явления могут описываться в различных системах отсчёта и системах координат. При этом характеристики движения точки
- 26. Существуют формулы, позволяющие преобразовать координаты точки в одной системе координат к координатам той же точки в
- 27. Естественный способ описания движения При естественном способе задаётся удаление точки вдоль траектории от начала отсчёта (направленная
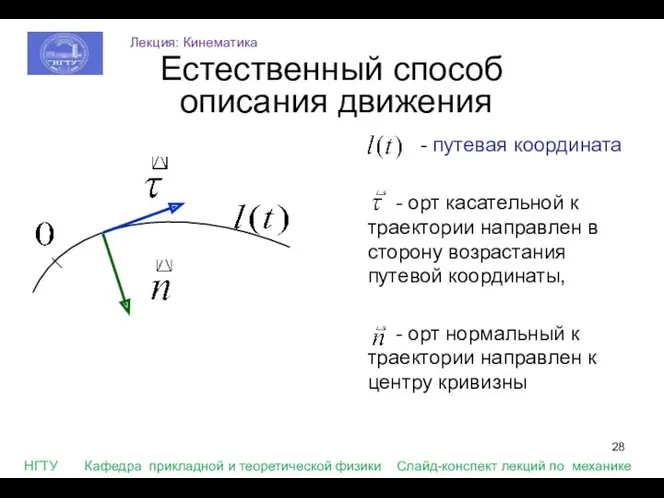
- 28. - путевая координата - орт касательной к траектории направлен в сторону возрастания путевой координаты, - орт
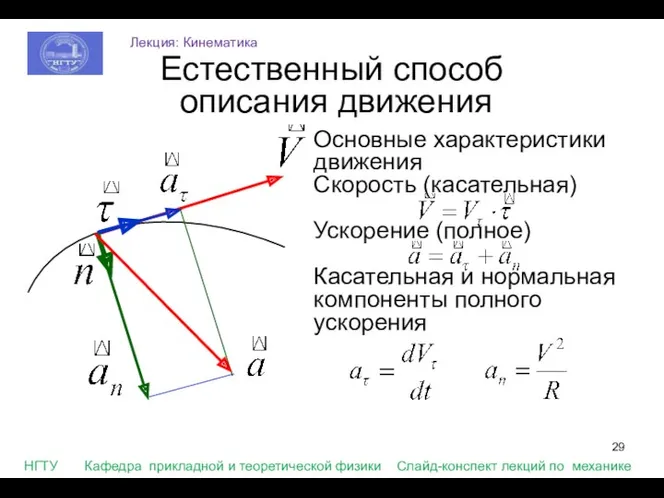
- 29. Основные характеристики движения Скорость (касательная) Ускорение (полное) Касательная и нормальная компоненты полного ускорения Естественный способ описания
- 30. Одномерное прямолинейное движение Полезной иллюстрацией основных особенностей описания движения является описание одномерного прямолинейного движения, т.е. движения,
- 31. Пусть точка двигалась неравномерно вдоль оси, как показано на рисунке а). Зависимость её координаты от времени
- 32. Средняя скорость на участке АВ равна угловому коэффициенту хорды АВ (синяя линия): Мгновенная скорость в точке
- 33. Среднее ускорение на участке АВ равно угловому коэффициенту хорды АВ (синяя линия): Мгновенное ускорение в точке
- 34. При заданных проекциях ускорения и начальной скорости проекция скорости в любой момент времени вычисляется по формуле
- 35. В частном случае движения с постоянным ускорением Проекция скорости в любой момент времени вычисляется по формуле
- 36. Перемещение в направлении оси ОХ численно равно площади между графиком скорости вдоль этого направления и осью
- 37. При движении по окружности положение точки можно характеризовать при помощи центрального угла (угловая координата), при этом
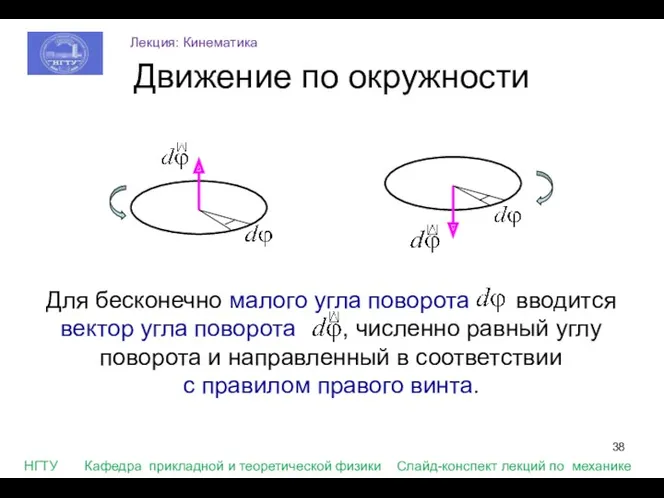
- 38. Движение по окружности Для бесконечно малого угла поворота вводится вектор угла поворота , численно равный углу
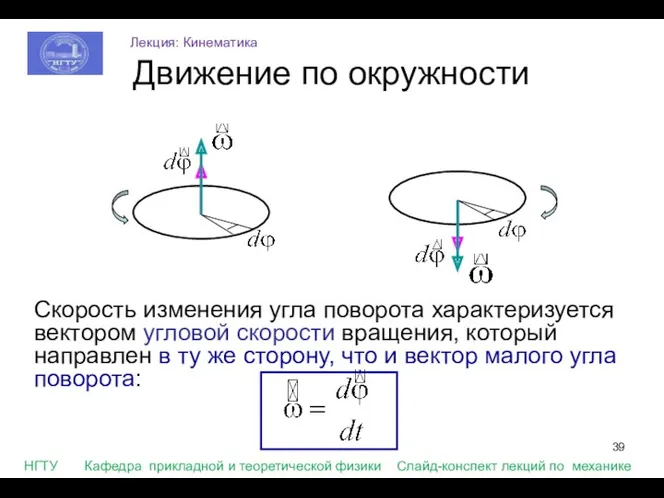
- 39. Движение по окружности Скорость изменения угла поворота характеризуется вектором угловой скорости вращения, который направлен в ту
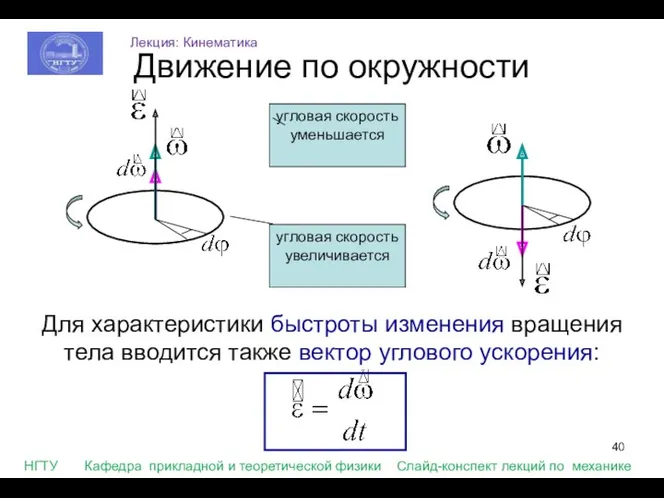
- 40. Движение по окружности Для характеристики быстроты изменения вращения тела вводится также вектор углового ускорения: угловая скорость
- 41. При заданных угловом ускорении и начальной угловой скорости угловая скорость в любой момент времени вычисляется по
- 42. Законы Ньютона 1 закон: существуют такие системы отсчёта (СО), в которых состояние движения тела не изменяется
- 43. 2 закон: ускорение, с которым движется тело, прямо пропорционально суммарной силе, приложенной к телу и обратно
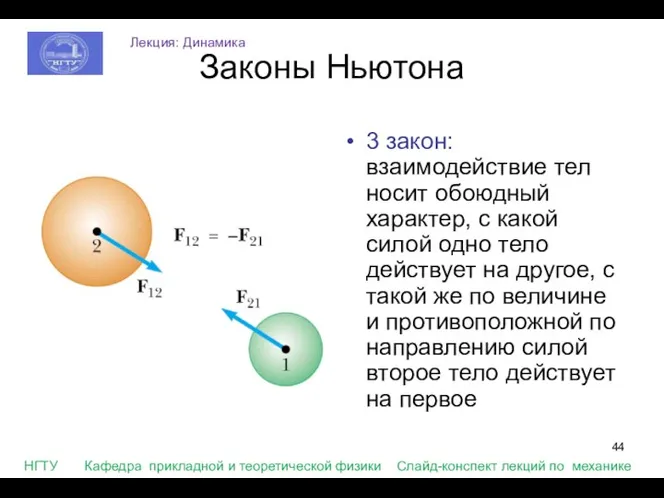
- 44. Законы Ньютона 3 закон: взаимодействие тел носит обоюдный характер, с какой силой одно тело действует на
- 45. Силы Сила – векторная величина, характеризующая результат воздействия на данное тело со стороны других тел. Силы
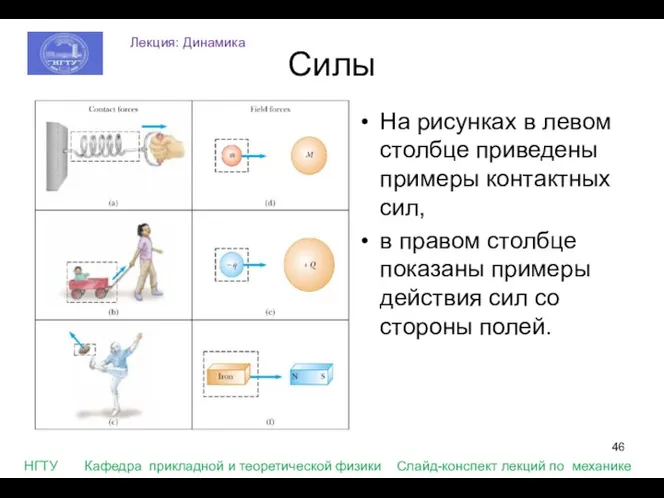
- 46. Силы На рисунках в левом столбце приведены примеры контактных сил, в правом столбце показаны примеры действия
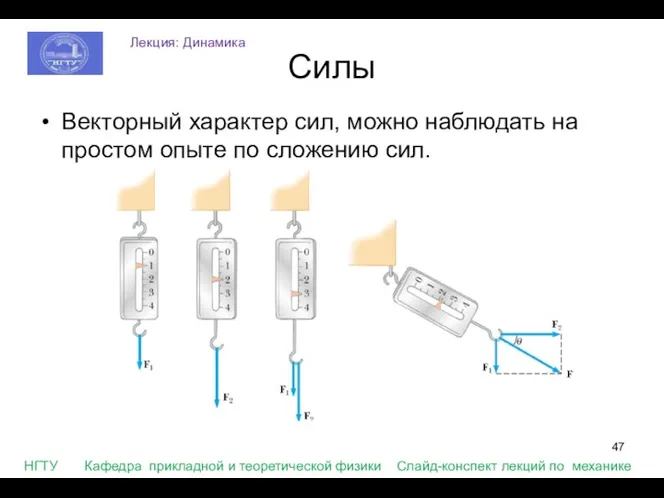
- 47. Силы Векторный характер сил, можно наблюдать на простом опыте по сложению сил.
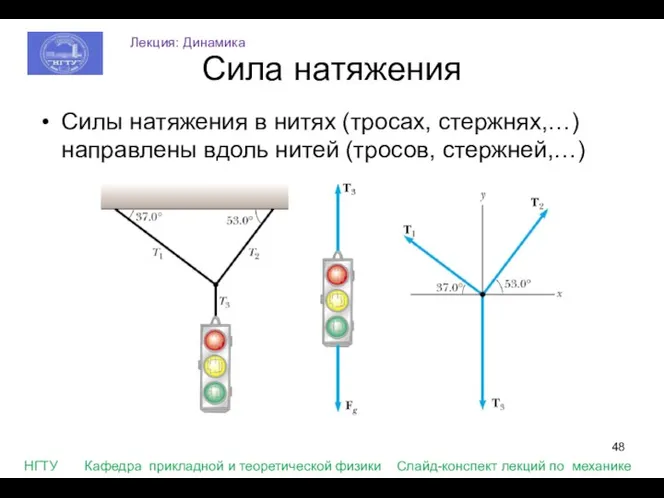
- 48. Сила натяжения Силы натяжения в нитях (тросах, стержнях,…) направлены вдоль нитей (тросов, стержней,…)
- 49. Сила тяжести - это сила гравитационного притяжения тела к Земле. Вес тела – сила, с которой
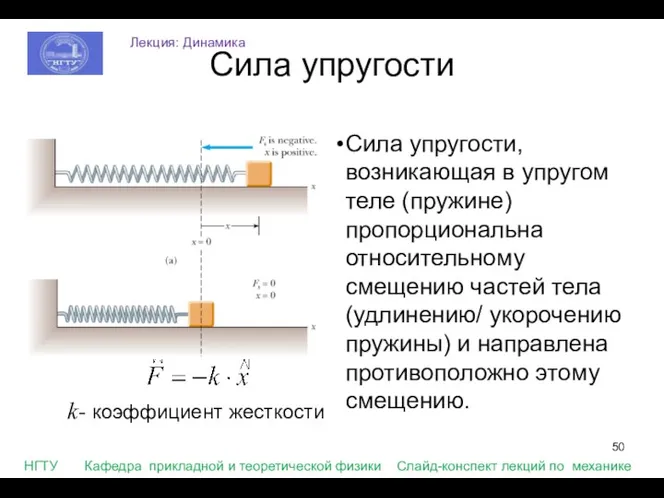
- 50. Сила упругости Сила упругости, возникающая в упругом теле (пружине) пропорциональна относительному смещению частей тела (удлинению/ укорочению
- 51. Сила трения Сила трения бывает двух видов: сила трения покоя и сила трения скольжения. Сила трения
- 52. Разложение сил на составляющие При движении каждого из тел простой системы по прямой, силы часто разлагают
- 53. Учёт сил взаимодействия Если два тела взаимодействуют контактным (как показано на рисунке) или бесконтактным способом, необходимо
- 54. Импульс тела Импульс тела Исходя из 2-го закона Ньютона Таким образом, более общая формулировка основного уравнения
- 55. Исходя из более общего уравнения динамики , где - это импульс силы. Изменение импульса будет Для
- 56. Если в уравнении динамики положить , то также будет , т.е. импульс тела будет сохраняться. Условия
- 57. Исходя из более общего уравнения динамики Реактивное движение - реактивная сила, т.е. сила, возникающая вследствие изменения
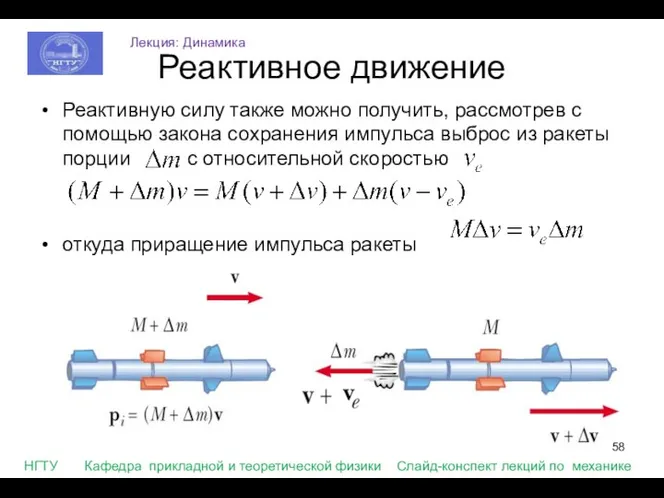
- 58. Реактивное движение Реактивную силу также можно получить, рассмотрев с помощью закона сохранения импульса выброс из ракеты
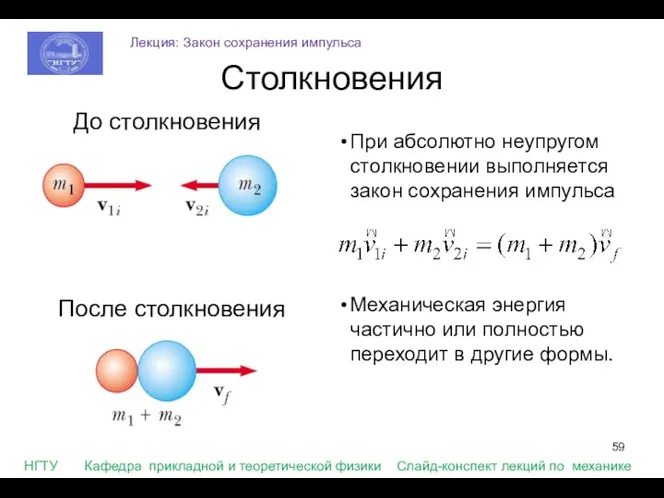
- 59. Столкновения При абсолютно неупругом столкновении выполняется закон сохранения импульса Механическая энергия частично или полностью переходит в
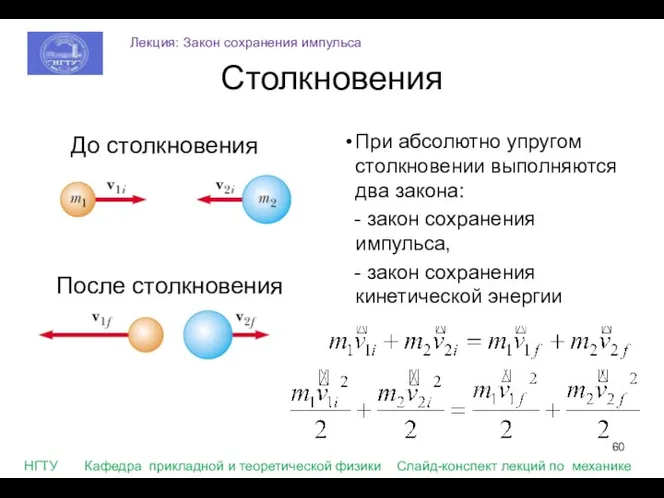
- 60. Столкновения При абсолютно упругом столкновении выполняются два закона: - закон сохранения импульса, - закон сохранения кинетической
- 62. Скачать презентацию
Основные определения
Механика делится на три раздела: кинематику, динамику, статику.
Кинематика изучает
Основные определения
Механика делится на три раздела: кинематику, динамику, статику.
Кинематика изучает
Идеальный объект движения
Идеальной моделью для описания поступательного движения тела является материальная
Идеальный объект движения
Идеальной моделью для описания поступательного движения тела является материальная
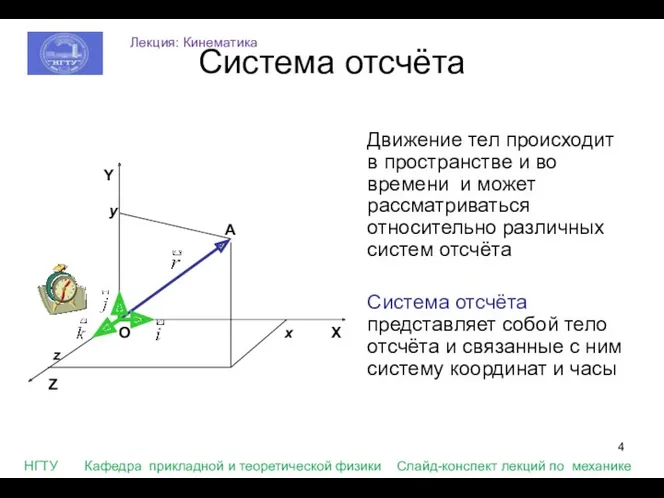
Система отсчёта
Движение тел происходит в пространстве и во времени и может
Система отсчёта
Движение тел происходит в пространстве и во времени и может
Векторный способ
описания движения
При векторном способе описания движения используются следующие векторные
Векторный способ
описания движения
При векторном способе описания движения используются следующие векторные
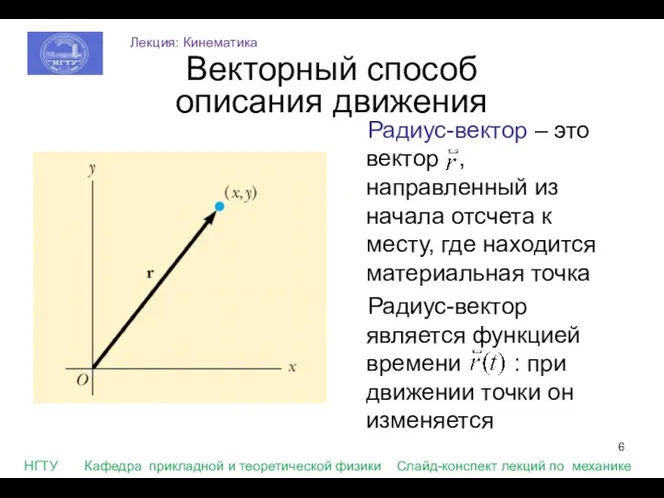
Радиус-вектор – это вектор , направленный из начала отсчета к месту,
Радиус-вектор – это вектор , направленный из начала отсчета к месту,
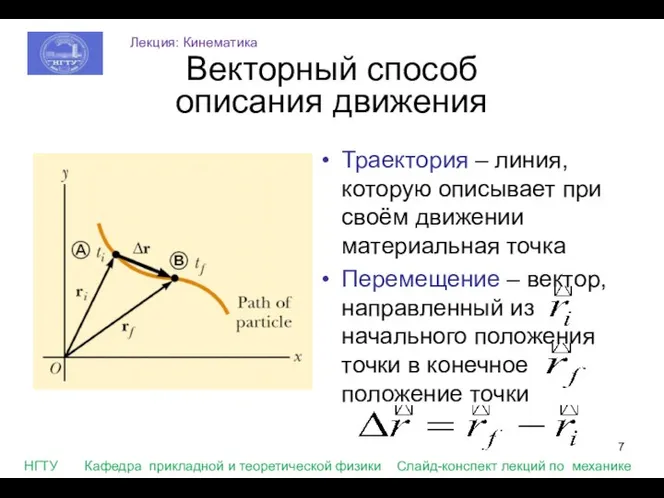
Траектория – линия, которую описывает при своём движении материальная точка
Перемещение –
Траектория – линия, которую описывает при своём движении материальная точка
Перемещение –
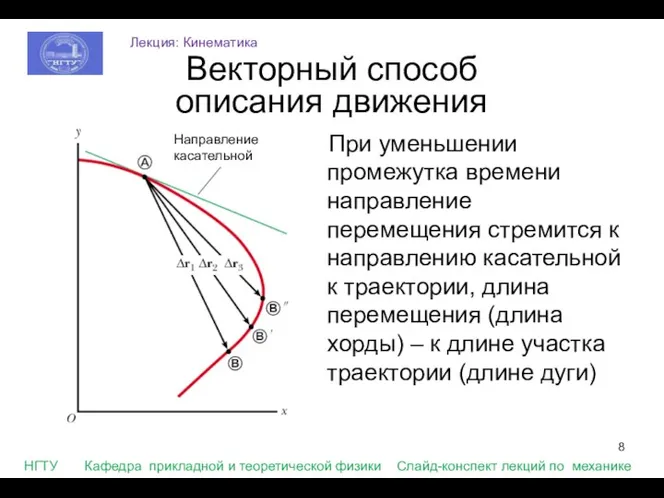
При уменьшении промежутка времени направление перемещения стремится к направлению касательной к
При уменьшении промежутка времени направление перемещения стремится к направлению касательной к
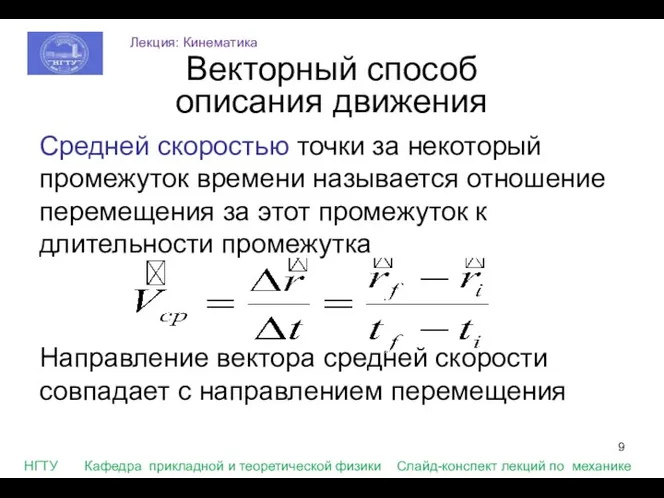
Средней скоростью точки за некоторый промежуток времени называется отношение перемещения за
Средней скоростью точки за некоторый промежуток времени называется отношение перемещения за
Мгновенной скоростью точки в некоторый момент времени называется предел, к которому
Мгновенной скоростью точки в некоторый момент времени называется предел, к которому
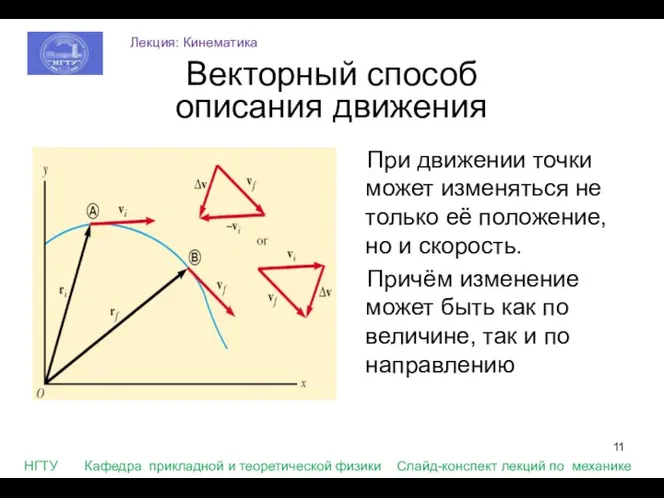
При движении точки может изменяться не только её положение, но и
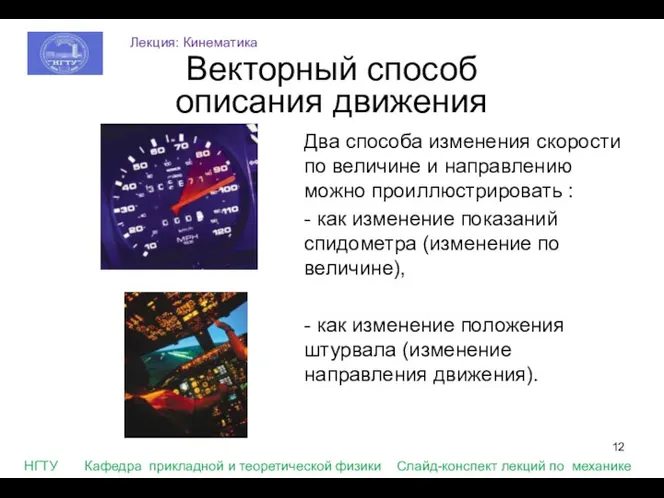
Два способа изменения скорости по величине и направлению можно проиллюстрировать :
-
Два способа изменения скорости по величине и направлению можно проиллюстрировать :
-

Приведенные слева рисунки показывают, что, как и любая векторная величина, скорость
Приведенные слева рисунки показывают, что, как и любая векторная величина, скорость
Ускорение - физическая величина, характеризующая изменение скорости
Мгновенным ускорением точки в
Ускорение - физическая величина, характеризующая изменение скорости
Мгновенным ускорением точки в
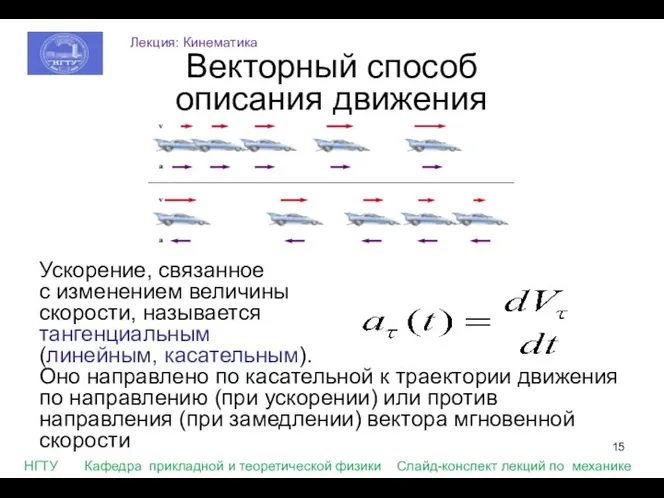
Ускорение, связанное
с изменением величины
скорости, называется
тангенциальным
(линейным, касательным).
Оно
Ускорение, связанное
с изменением величины
скорости, называется
тангенциальным
(линейным, касательным).
Оно
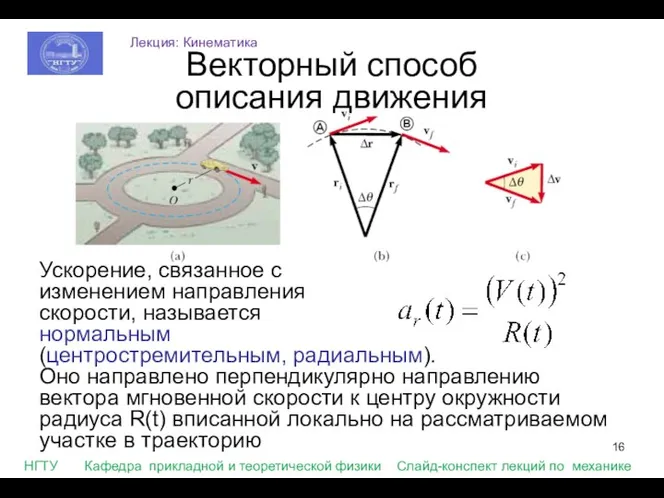
Ускорение, связанное с
изменением направления
скорости, называется
нормальным
(центростремительным, радиальным).
Оно
Ускорение, связанное с
изменением направления
скорости, называется
нормальным
(центростремительным, радиальным).
Оно
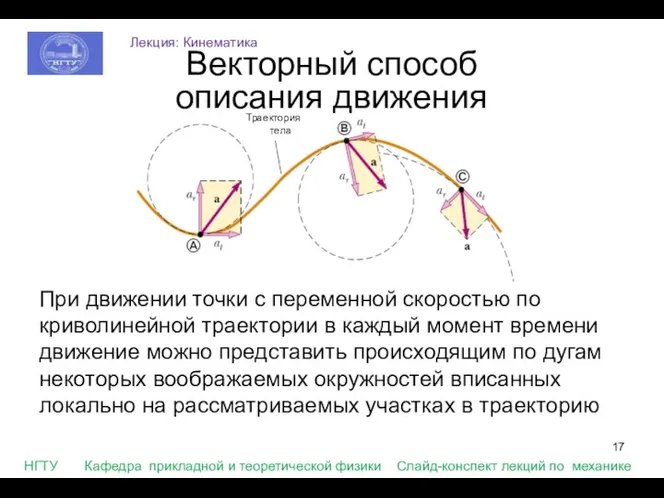
При движении точки с переменной скоростью по криволинейной траектории в каждый
При движении точки с переменной скоростью по криволинейной траектории в каждый
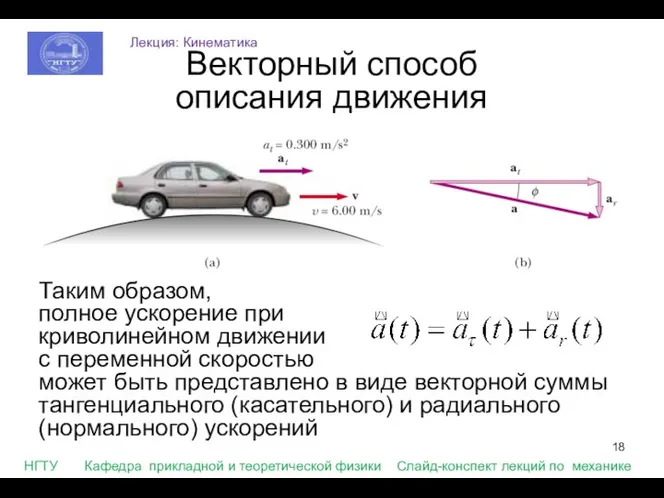
Таким образом,
полное ускорение при
криволинейном движении
с переменной скоростью
может
Таким образом,
полное ускорение при
криволинейном движении
с переменной скоростью
может
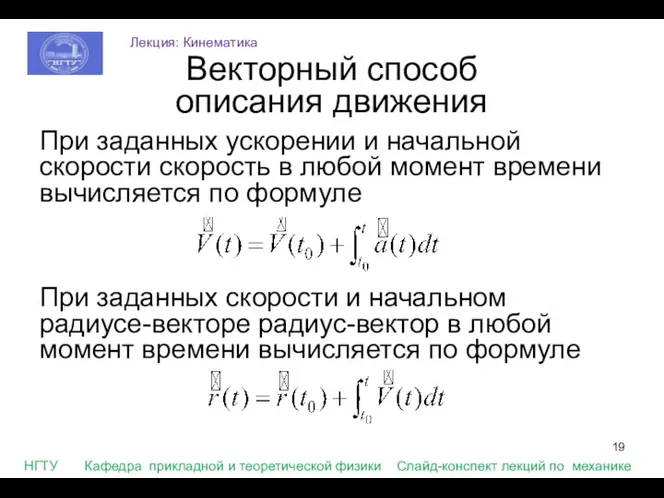
При заданных ускорении и начальной скорости скорость в любой момент времени
При заданных ускорении и начальной скорости скорость в любой момент времени
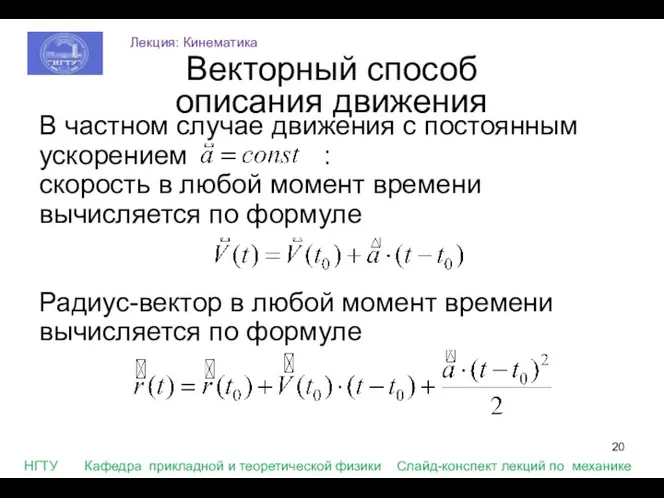
В частном случае движения с постоянным ускорением :
скорость в любой момент
В частном случае движения с постоянным ускорением :
скорость в любой момент
Координатный способ
описания движения
При координатном способе описания движения используются проекции следующих
Координатный способ
описания движения
При координатном способе описания движения используются проекции следующих
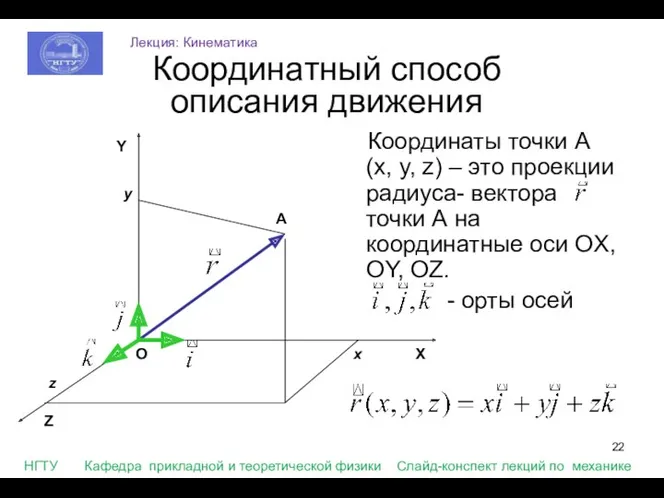
Координаты точки А (x, y, z) – это проекции радиуса- вектора
Координаты точки А (x, y, z) – это проекции радиуса- вектора
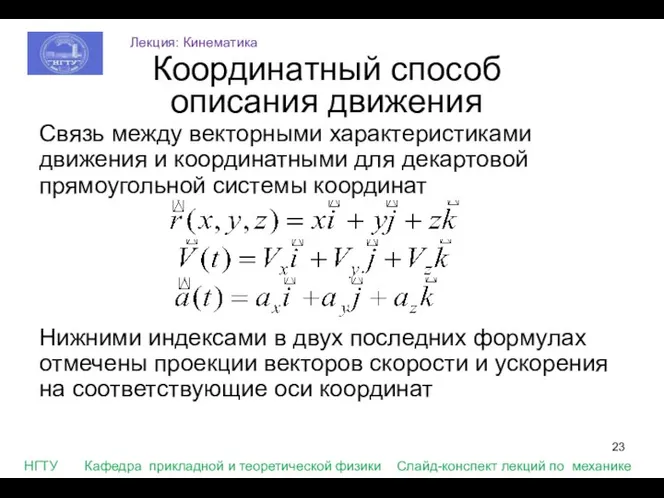
Связь между векторными характеристиками движения и координатными для декартовой прямоугольной системы
Связь между векторными характеристиками движения и координатными для декартовой прямоугольной системы
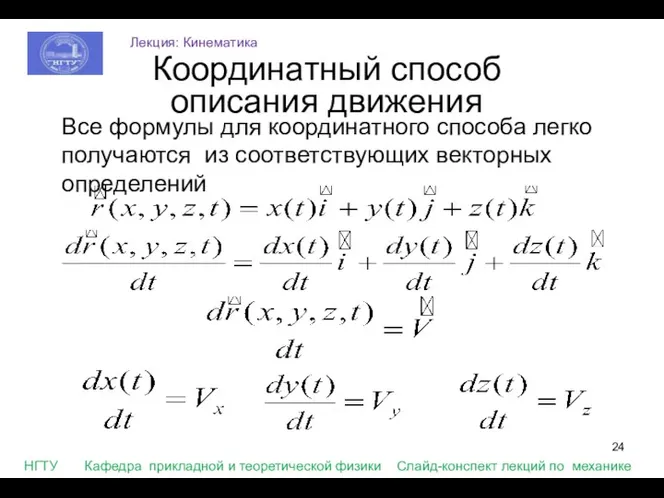
Все формулы для координатного способа легко получаются из соответствующих векторных определений
Координатный
Все формулы для координатного способа легко получаются из соответствующих векторных определений
Координатный
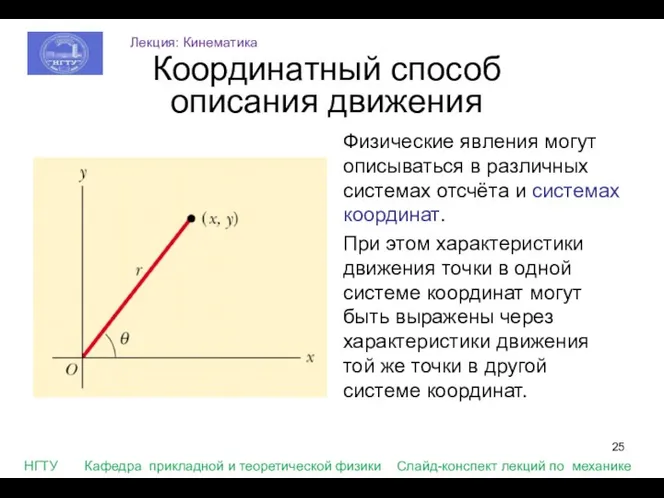
Физические явления могут описываться в различных системах отсчёта и системах координат.
Физические явления могут описываться в различных системах отсчёта и системах координат.
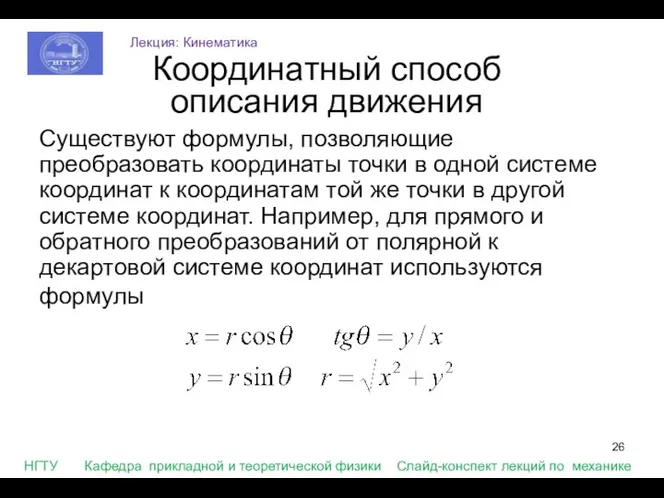
Существуют формулы, позволяющие преобразовать координаты точки в одной системе координат к
Существуют формулы, позволяющие преобразовать координаты точки в одной системе координат к
Естественный способ
описания движения
При естественном способе задаётся удаление точки вдоль траектории
Естественный способ
описания движения
При естественном способе задаётся удаление точки вдоль траектории
- путевая координата
- орт касательной к траектории направлен в
- путевая координата
- орт касательной к траектории направлен в
Основные характеристики движения
Скорость (касательная)
Ускорение (полное)
Касательная и нормальная компоненты полного ускорения
Естественный
Основные характеристики движения
Скорость (касательная)
Ускорение (полное)
Касательная и нормальная компоненты полного ускорения
Естественный
Одномерное прямолинейное движение
Полезной иллюстрацией основных особенностей описания движения является описание
Одномерное прямолинейное движение
Полезной иллюстрацией основных особенностей описания движения является описание
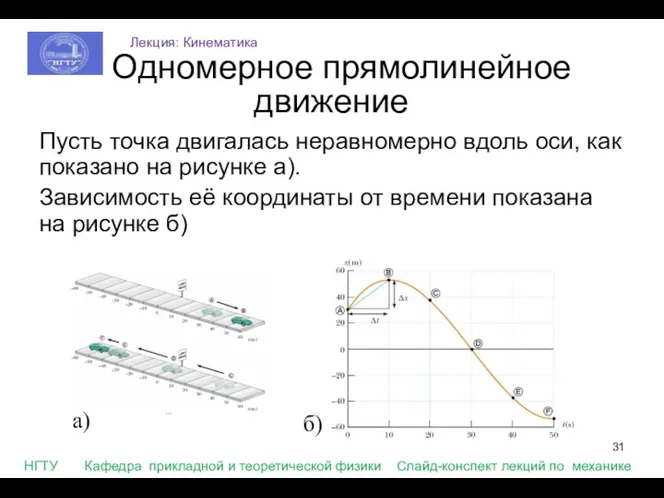
Пусть точка двигалась неравномерно вдоль оси, как показано на рисунке а).
Пусть точка двигалась неравномерно вдоль оси, как показано на рисунке а).
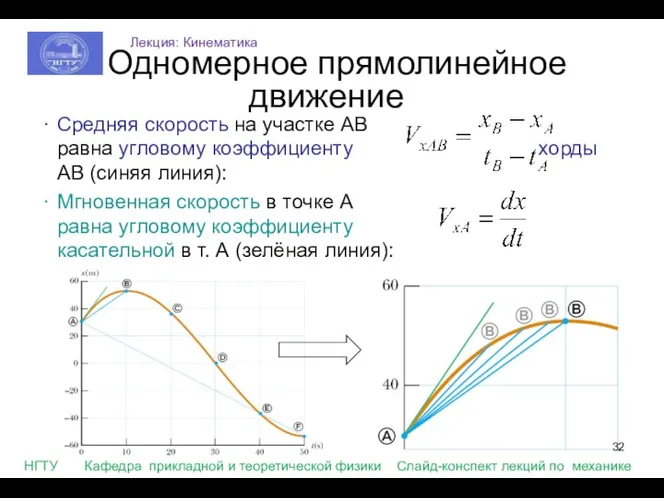
Средняя скорость на участке АВ равна угловому коэффициенту хорды АВ (синяя
Средняя скорость на участке АВ равна угловому коэффициенту хорды АВ (синяя
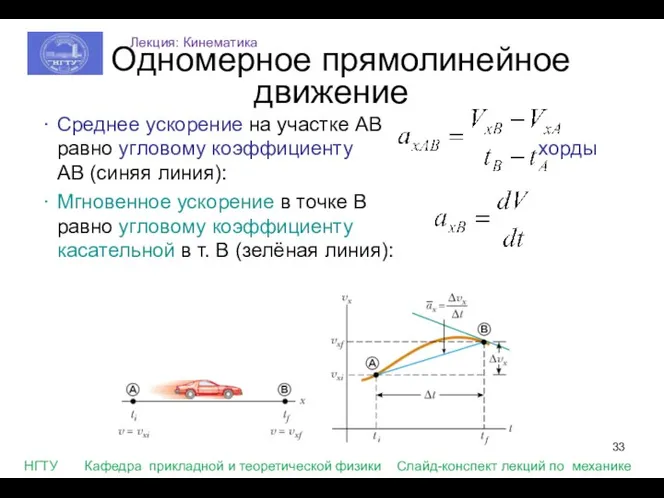
Среднее ускорение на участке АВ равно угловому коэффициенту хорды АВ (синяя
Среднее ускорение на участке АВ равно угловому коэффициенту хорды АВ (синяя
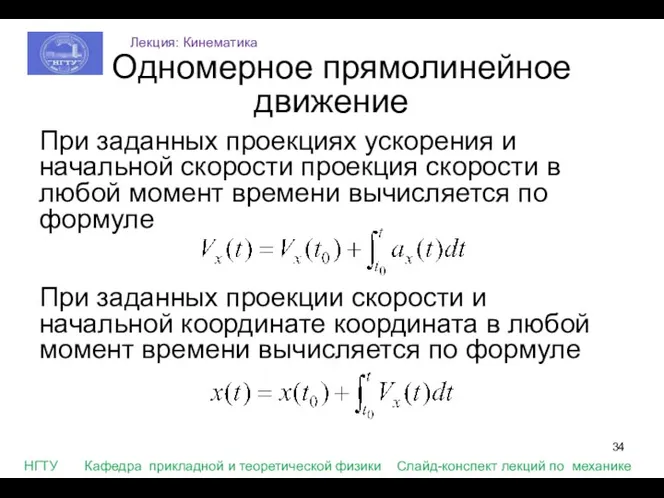
При заданных проекциях ускорения и начальной скорости проекция скорости в любой
При заданных проекциях ускорения и начальной скорости проекция скорости в любой
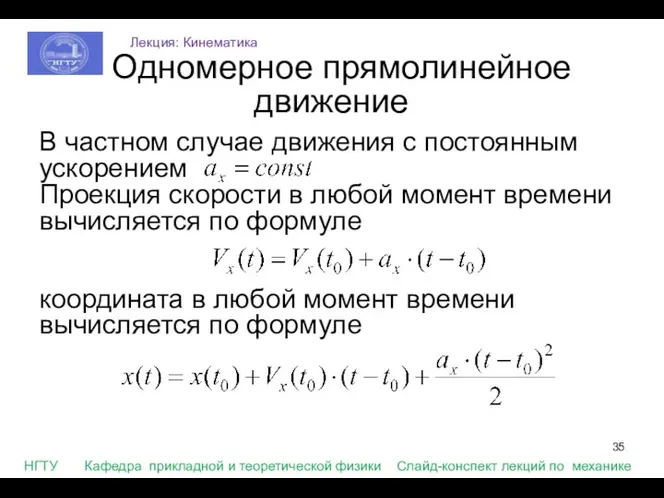
В частном случае движения с постоянным ускорением
Проекция скорости в любой
В частном случае движения с постоянным ускорением
Проекция скорости в любой
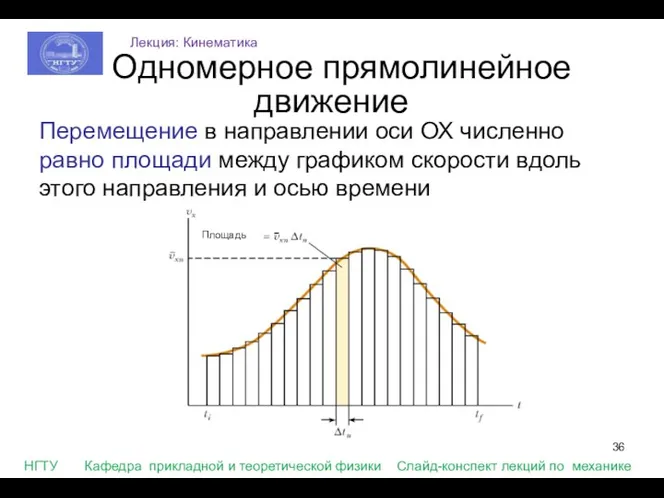
Перемещение в направлении оси ОХ численно равно площади между графиком скорости
Перемещение в направлении оси ОХ численно равно площади между графиком скорости
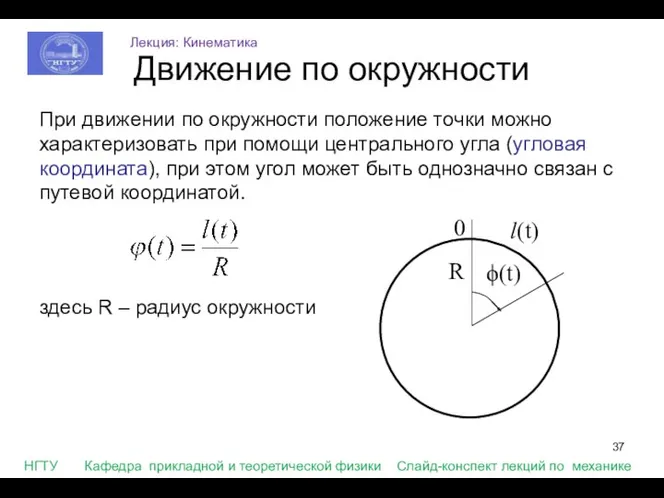
При движении по окружности положение точки можно характеризовать при помощи центрального
При движении по окружности положение точки можно характеризовать при помощи центрального
Движение по окружности
Для бесконечно малого угла поворота вводится вектор угла поворота
Движение по окружности
Для бесконечно малого угла поворота вводится вектор угла поворота
Движение по окружности
Скорость изменения угла поворота характеризуется вектором угловой скорости вращения,
Движение по окружности
Скорость изменения угла поворота характеризуется вектором угловой скорости вращения,
Движение по окружности
Для характеристики быстроты изменения вращения тела вводится также вектор
Движение по окружности
Для характеристики быстроты изменения вращения тела вводится также вектор
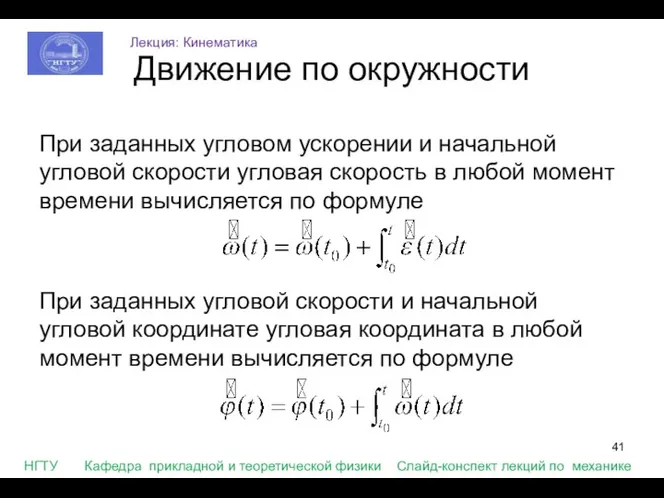
При заданных угловом ускорении и начальной угловой скорости угловая скорость в
При заданных угловом ускорении и начальной угловой скорости угловая скорость в
Законы Ньютона
1 закон: существуют такие системы отсчёта (СО), в которых состояние
Законы Ньютона
1 закон: существуют такие системы отсчёта (СО), в которых состояние
2 закон: ускорение, с которым движется тело, прямо пропорционально суммарной силе,
2 закон: ускорение, с которым движется тело, прямо пропорционально суммарной силе,
Законы Ньютона
3 закон: взаимодействие тел носит обоюдный характер, с какой силой
Законы Ньютона
3 закон: взаимодействие тел носит обоюдный характер, с какой силой
Силы
Сила – векторная величина, характеризующая результат воздействия на данное тело со
Силы
Сила – векторная величина, характеризующая результат воздействия на данное тело со
Силы
На рисунках в левом столбце приведены примеры контактных сил,
в правом
Силы
На рисунках в левом столбце приведены примеры контактных сил,
в правом
Силы
Векторный характер сил, можно наблюдать на простом опыте по сложению сил.
Силы
Векторный характер сил, можно наблюдать на простом опыте по сложению сил.
Сила натяжения
Силы натяжения в нитях (тросах, стержнях,…) направлены вдоль нитей (тросов,
Сила натяжения
Силы натяжения в нитях (тросах, стержнях,…) направлены вдоль нитей (тросов,
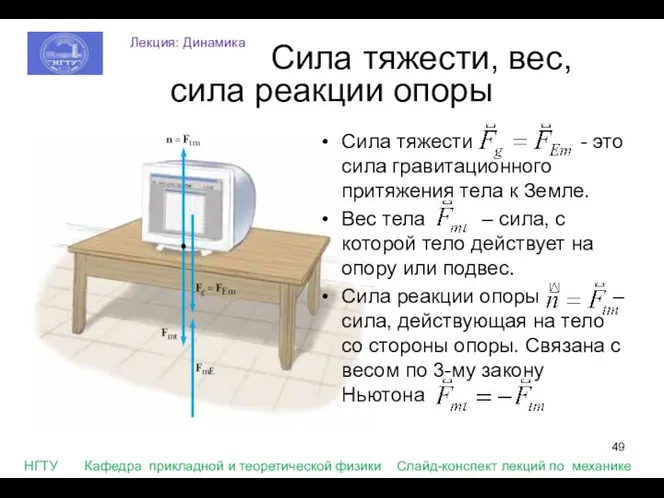
Сила тяжести - это сила гравитационного притяжения тела к Земле.
Вес тела
Сила тяжести - это сила гравитационного притяжения тела к Земле.
Вес тела
Сила упругости
Сила упругости, возникающая в упругом теле (пружине) пропорциональна относительному смещению
Сила упругости
Сила упругости, возникающая в упругом теле (пружине) пропорциональна относительному смещению
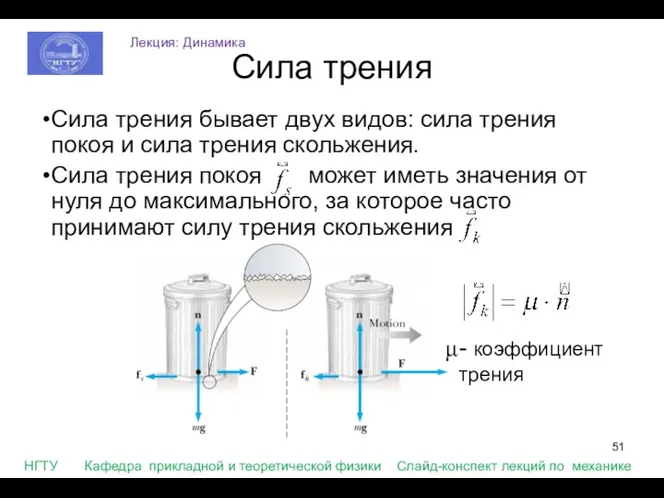
Сила трения
Сила трения бывает двух видов: сила трения покоя и сила
Сила трения
Сила трения бывает двух видов: сила трения покоя и сила
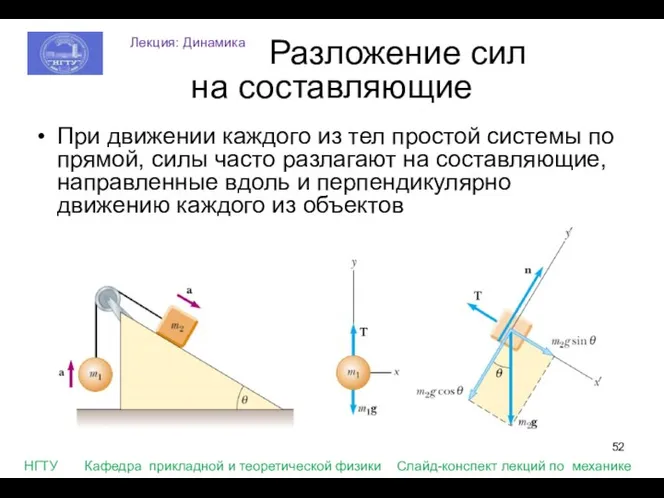
Разложение сил
на составляющие
При движении каждого из тел простой системы
Разложение сил
на составляющие
При движении каждого из тел простой системы
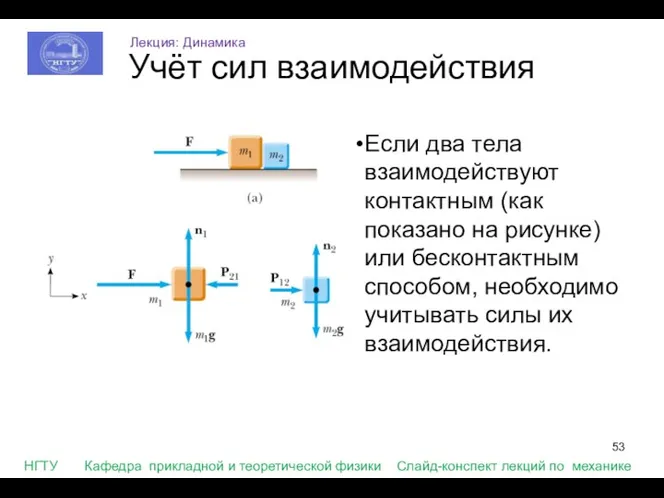
Учёт сил взаимодействия
Если два тела взаимодействуют контактным (как показано на рисунке)
Учёт сил взаимодействия
Если два тела взаимодействуют контактным (как показано на рисунке)
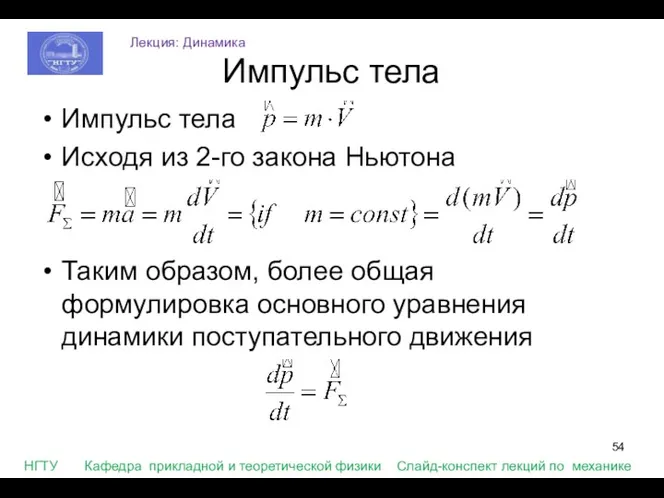
Импульс тела
Импульс тела
Исходя из 2-го закона Ньютона
Таким образом, более общая
Импульс тела
Импульс тела
Исходя из 2-го закона Ньютона
Таким образом, более общая
Исходя из более общего уравнения динамики , где - это импульс
Исходя из более общего уравнения динамики , где - это импульс
Если в уравнении динамики положить
, то также будет ,
Если в уравнении динамики положить
, то также будет ,
Исходя из более общего уравнения динамики
Реактивное движение
- реактивная сила, т.е. сила,
Исходя из более общего уравнения динамики
Реактивное движение
- реактивная сила, т.е. сила,
Реактивное движение
Реактивную силу также можно получить, рассмотрев с помощью закона сохранения
Реактивное движение
Реактивную силу также можно получить, рассмотрев с помощью закона сохранения
Столкновения
При абсолютно неупругом столкновении выполняется закон сохранения импульса
Механическая энергия частично
Столкновения
При абсолютно неупругом столкновении выполняется закон сохранения импульса
Механическая энергия частично
Столкновения
При абсолютно упругом столкновении выполняются два закона:
- закон сохранения
Столкновения
При абсолютно упругом столкновении выполняются два закона:
- закон сохранения
 Магнитные свойства горных пород и руд
Магнитные свойства горных пород и руд Масса, плотность, объем. 7 класс
Масса, плотность, объем. 7 класс Молекулярная физика
Молекулярная физика Компенсация реактивной мощности в системах электроснабжения промышленных предприятий
Компенсация реактивной мощности в системах электроснабжения промышленных предприятий Преобразователи электрических величин
Преобразователи электрических величин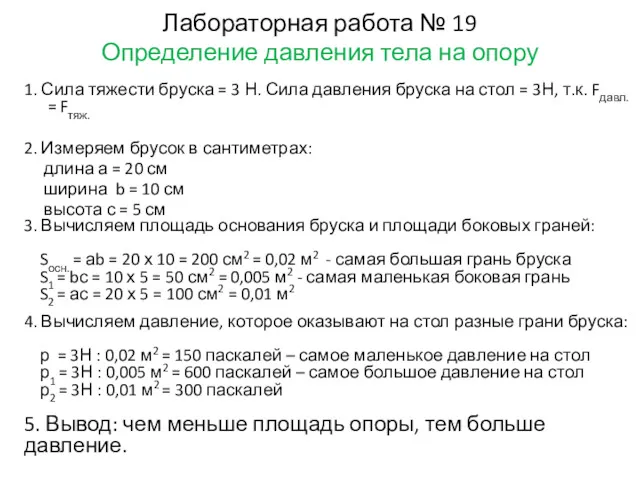 Определение давления тела на опору
Определение давления тела на опору : Слюсарно-механічні способи відновлення
: Слюсарно-механічні способи відновлення Тепловое излучение
Тепловое излучение Механические передачи. Ременные передачи
Механические передачи. Ременные передачи Разработка урока физики: Электризация тел
Разработка урока физики: Электризация тел Моделирование геомеханических процессов. Тема 11. Лекция № 16
Моделирование геомеханических процессов. Тема 11. Лекция № 16 Электронная презентация Два способа изменения внутренней энергии
Электронная презентация Два способа изменения внутренней энергии Масова частка речовини у розчині
Масова частка речовини у розчині Мультимедийная разработка внеклассного мероприятия Пионеры русской космонавтики
Мультимедийная разработка внеклассного мероприятия Пионеры русской космонавтики Режимы работы промышленных электрических сетей
Режимы работы промышленных электрических сетей Механические колебания
Механические колебания Презентация по физике Экология и космос
Презентация по физике Экология и космос Диодтыѕ атќаратын ќызметі
Диодтыѕ атќаратын ќызметі Проекты АЭС с ВВЭР Российские реакторы 3-го поколения
Проекты АЭС с ВВЭР Российские реакторы 3-го поколения Электризация тел. Электроскоп. Проводники и диэлектрики
Электризация тел. Электроскоп. Проводники и диэлектрики Подшипники скольжения
Подшипники скольжения Решение задач по физике (7 класс)
Решение задач по физике (7 класс) Цифровые сигналы
Цифровые сигналы Открытие электромагнитной индукции
Открытие электромагнитной индукции Измерение физических величин
Измерение физических величин Поверхностное натяжение. Термодинамика жидкостей
Поверхностное натяжение. Термодинамика жидкостей Своя игра по физике
Своя игра по физике Агрегатные состояния вещества. Плавление и отвердевание кристаллических тел
Агрегатные состояния вещества. Плавление и отвердевание кристаллических тел