- Кинематика движения материальной точки

Содержание
- 2. Тема 2. КИНЕМАТИКА ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ 2.1. Понятие механики, модели в механике 2.2. Система отсчета, тело
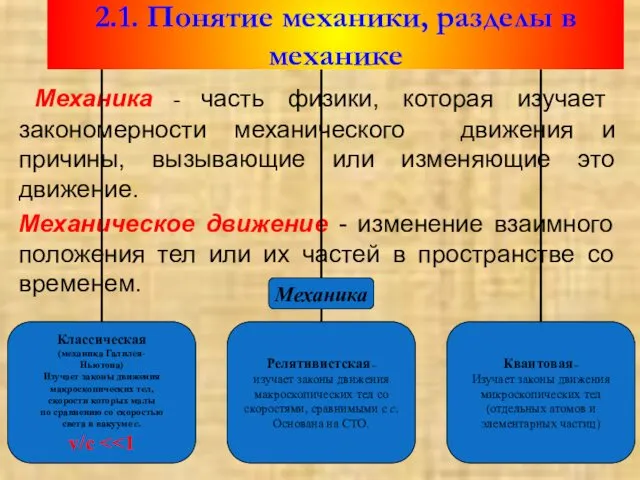
- 3. 2.1. Понятие механики, разделы в механике
- 4. Предметом классической механики является механическое движение взаимодействующих между собой макротел при скоростях, много меньше скорости света
- 5. Кинематика (от греческого слова kinema – движение) – раздел механики, в котором изучаются геометрические свойства движения
- 6. Модели в механике Материальная точка - тело, размерами, формой и внутренним строением которого в данной задаче
- 7. Без знаний механики невозможно представить себе развитие современного машиностроения. Развитие механики, как науки, начиналось с III
- 9. Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564 – 1642) и окончательно сформулированы
- 10. Галилео Галилей (Galileo Galilei) астроном, философ и физик. Важнейшие роботы улучшение телескопа; астрономические наблюдения; первый закон
- 11. Исаак Ньютон (Isaac Newton) физик, математик, астроном, алхимик и философ Важнейшие работы закон всемирного тяготения дифференциальное
- 12. Альберт Эйнштейн (Albert Einstein) величайший ученый 20 века Важнейшие работы: теория относительности; квантовая и статистическая механика;
- 13. 2.2. Система отсчета, тело отсчета Всякое движение относительно, поэтому для описания движения необходимо условиться, относительно какого
- 14. Система отсчета – совокупность системы координат и часов, связанных с телом по отношению к которому изучается
- 15. Пространство трехмерно, поэтому «естественной» системой координат является, декартова или прямоугольная система координат, которой мы в основном
- 16. Рисунок 2.1 При движении материальной точки её координаты с течением времени изменяются. В общем случае её
- 17. Кинематические уравнения движения материальной точки: Эти уравнения эквивалентны векторному уравнению где х, у, z – проекции
- 18. Число независимых координат, полностью определяющих положение точки в пространстве, называется числом степеней свободы i Если материальная
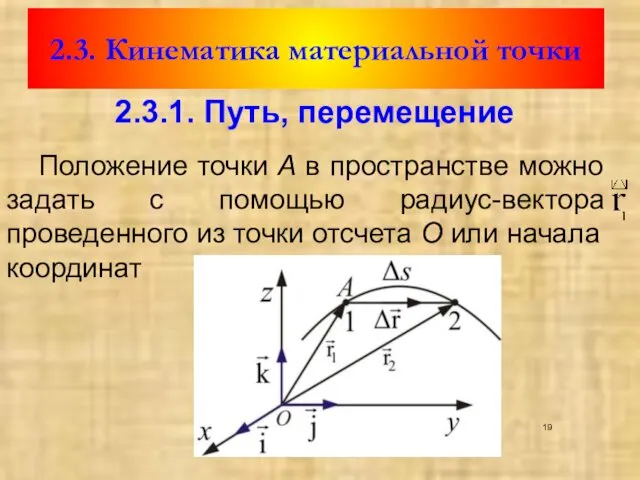
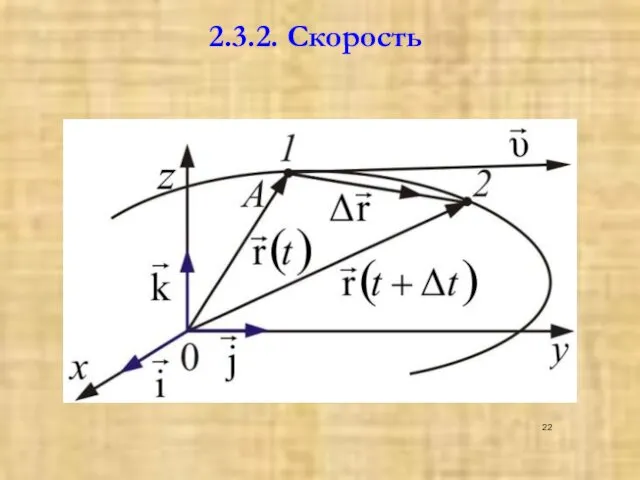
- 19. 2.3. Кинематика материальной точки 2.3.1. Путь, перемещение Положение точки А в пространстве можно задать с помощью
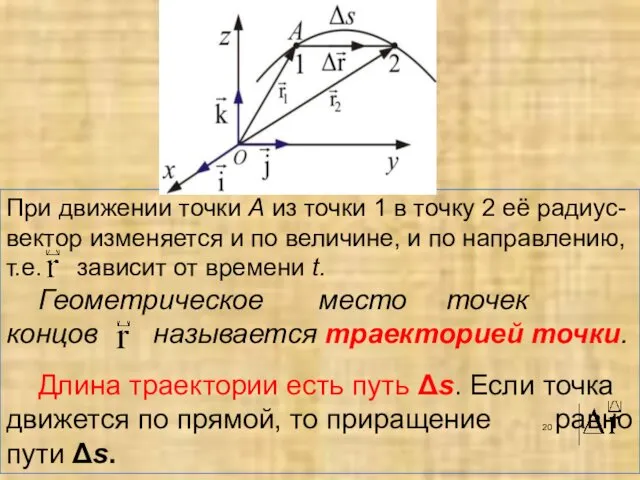
- 20. При движении точки А из точки 1 в точку 2 её радиус-вектор изменяется и по величине,
- 21. Пусть за время Δt точка А переместилась из точки 1 в точку 2. Вектор перемещения есть
- 22. 2.3.2. Скорость
- 23. Скорость Средний вектор скорости определяется как отношение вектора перемещения ко времени Δt, за которое это перемещение
- 24. Мгновенная скорость -вектор скорости в данный момент времени равен первой производной от по времени и направлен
- 25. При Δt → 0 т.е. на бесконечно малом участке траектории ΔS = Δr (перемещение совпадает с
- 26. Обратное действие – интегрирование Рисунок 2.5 – площадь бесконечно узкого прямоугольника. Чтобы вычислить весь путь S
- 27. (2.3.5) Геометрический смысл этого интеграла в том, что площадь под кривой есть путь тела за время
- 28. Принцип независимости движения. (Принцип суперпозиции) Рассмотрим простой опыт: Этот опыт доказывает принцип независимости движения (действия сил).
- 30. Движение тел в поле тяжести Земли g - ускорение свободного падения в поле тяжести Земли. Подставляя
- 33. Если материальная точка участвует в нескольких движениях, то ее результирующее перемещение равно векторной сумме перемещений, обусловленных
- 34. Так как Тогда Таким образом, скорость тоже подчиняется принципу независимости движения. В дальнейшем мы подробнее рассмотрим
- 35. В физике существует общий принцип, который называется принцип суперпозиции результирующий эффект сложного процесса взаимодействия представля-ет собой
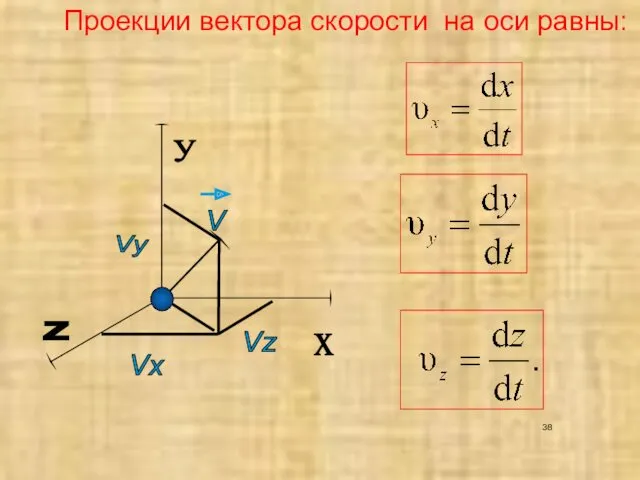
- 36. 2.3.3. Проекция вектора скорости на оси координат В векторной форме уравнения записываются легко и кратко. Но
- 37. Понятно, что х, y, z зависят от времени t, т.е. x(t), y(t), z(t). Зная зависимость этих
- 38. х у Z Проекции вектора скорости на оси равны:
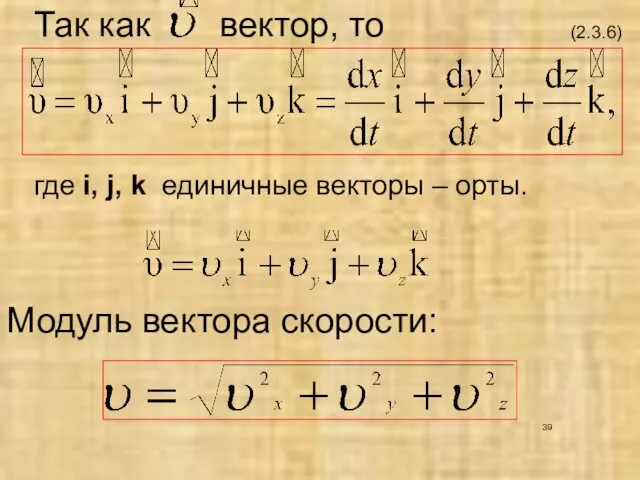
- 39. где i, j, k единичные векторы – орты. (2.3.6) Модуль вектора скорости: Так как вектор, то
- 40. 2.3.4. Ускорение. Нормальное и тангенциальное ускорения В произвольном случае движения скорость не остается постоянной. Быстрота изменения
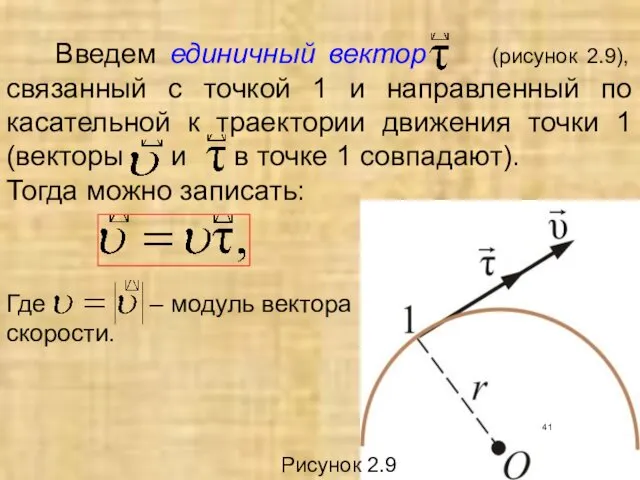
- 41. Введем единичный вектор (рисунок 2.9), связанный с точкой 1 и направленный по касательной к траектории движения
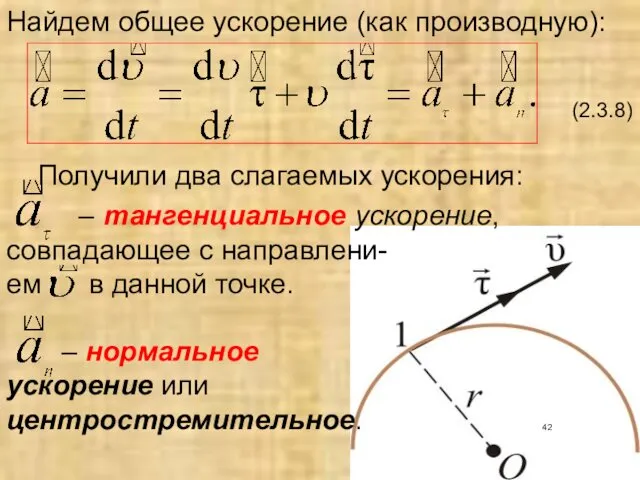
- 42. Найдем общее ускорение (как производную): (2.3.8) Получили два слагаемых ускорения: – тангенциальное ускорение, совпадающее с направлени-
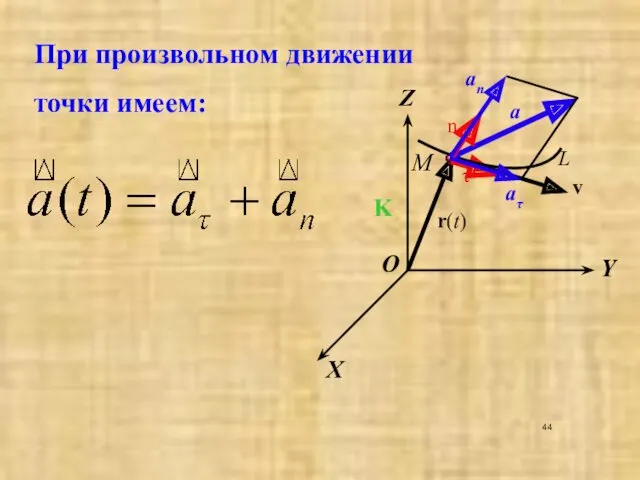
- 44. X Y Z K М r(t) L v a τ n При произвольном движении точки имеем:
- 45. или по модулю -показывает изменение вектора скорости по величине: - если то направлено в ту же
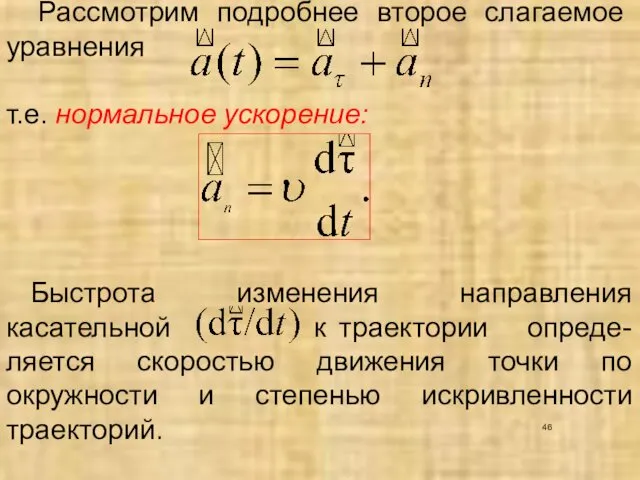
- 46. Рассмотрим подробнее второе слагаемое уравнения т.е. нормальное ускорение: Быстрота изменения направления касательной к траектории опреде-ляется скоростью
- 47. Радиус кривизны r – радиус такой окружности, которая сливается с кривой в данной точке на бесконечно
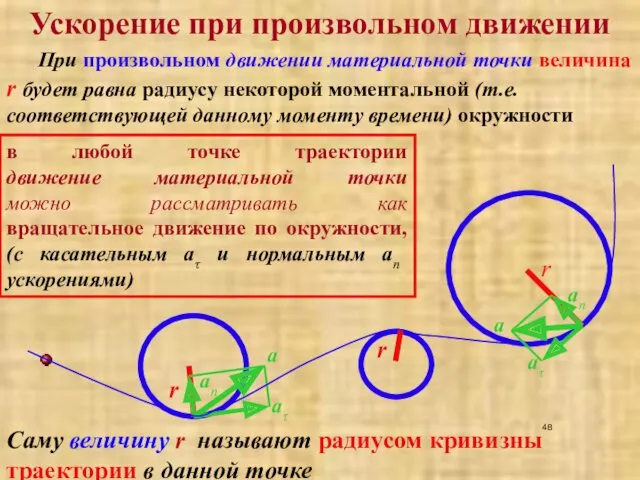
- 48. Ускорение при произвольном движении При произвольном движении материальной точки величина r будет равна радиусу некоторой моментальной
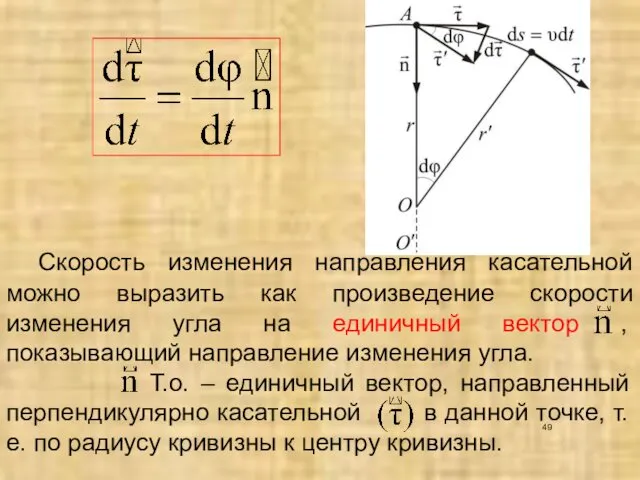
- 49. Скорость изменения направления касательной можно выразить как произведение скорости изменения угла на единичный вектор , показывающий
- 50. отсюда – нормальное ускорение или центростремительное т.к. направлено оно к центру кривизны, перпендикулярно Нормальное ускорение показывает
- 51. Центростремительным называют ускорение – когда движение происходит по окружности. А когда движение происходит по произвольной кривой
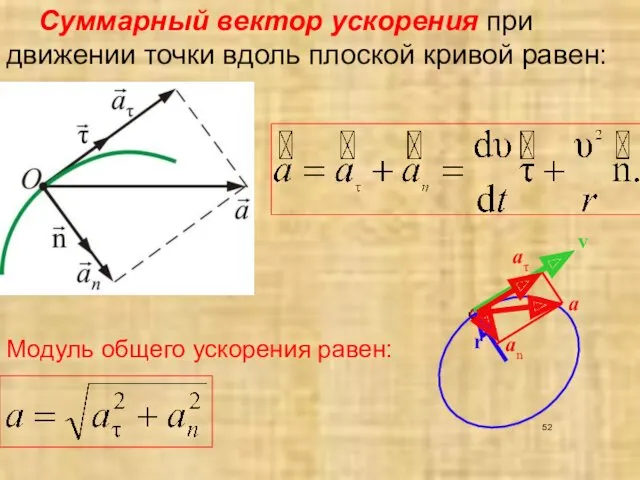
- 52. r v a an aτ Суммарный вектор ускорения при движении точки вдоль плоской кривой равен: Модуль
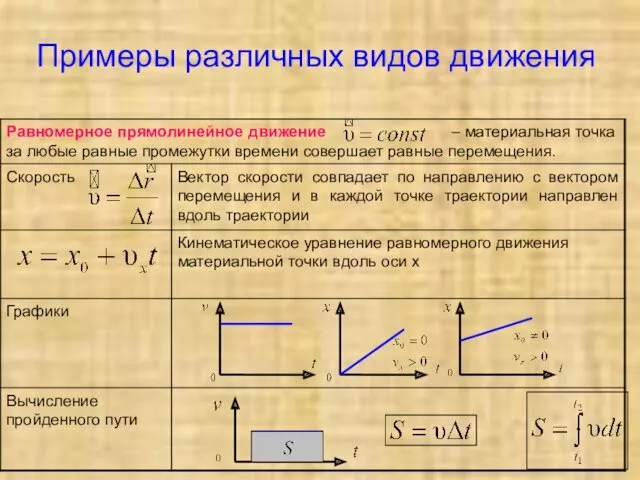
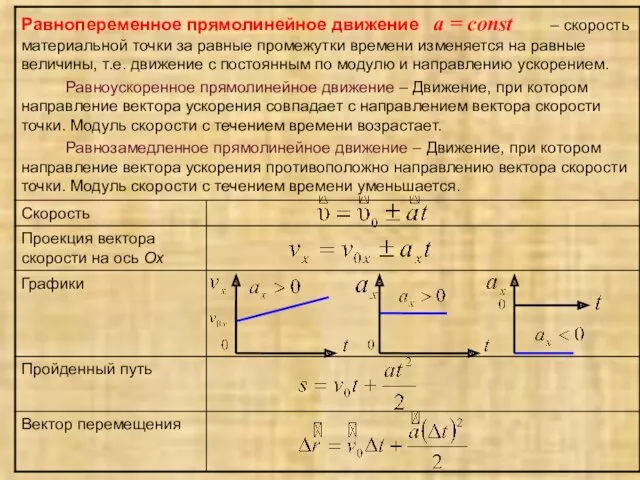
- 53. Рассмотрим несколько предельных (частных) случаев: – равномерное прямоли- нейное движение; – равноускоренное прямолинейное движение; – равномерное
- 54. Типы ускорений Частица движется прямолинейно Чтобы более наглядно представить свойства введенных составляющих полного ускорения, рассмотрим примеры
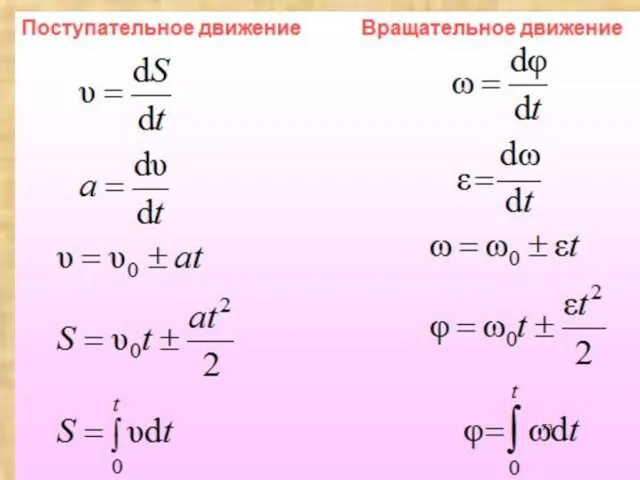
- 55. Вспомним несколько полезных формул (прямая задача кинематики) : При равномерном движении При движении с постоянным ускорением
- 56. По определению отсюда или, так как Следовательно Обратная задача кинематики заключается в том, что по известному
- 57. 2.4. Кинематика твердого тела Различают пять видов движения твердого тела: - поступательное; - вращательное вокруг неподвижной
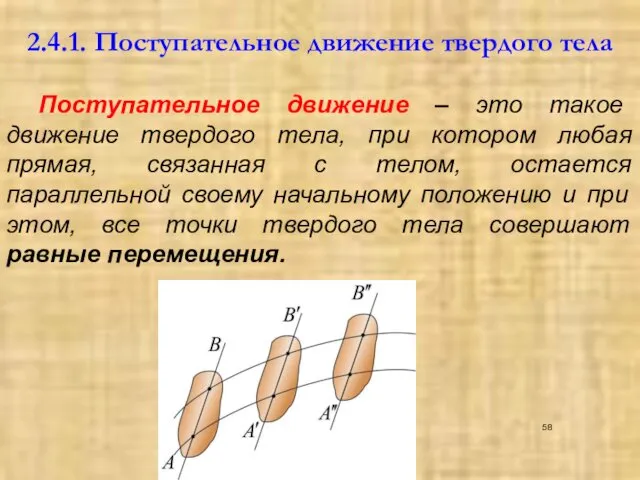
- 58. 2.4.1. Поступательное движение твердого тела Поступательное движение – это такое движение твердого тела, при котором любая
- 59. Скорости и ускорения всех точек твердого тела в данный момент времени t одинаковы. Это позволяет свести
- 60. При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной и той
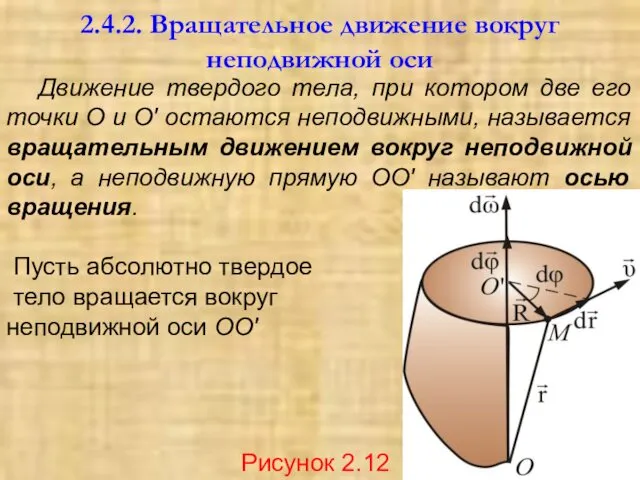
- 61. 2.4.2. Вращательное движение вокруг неподвижной оси Движение твердого тела, при котором две его точки О и
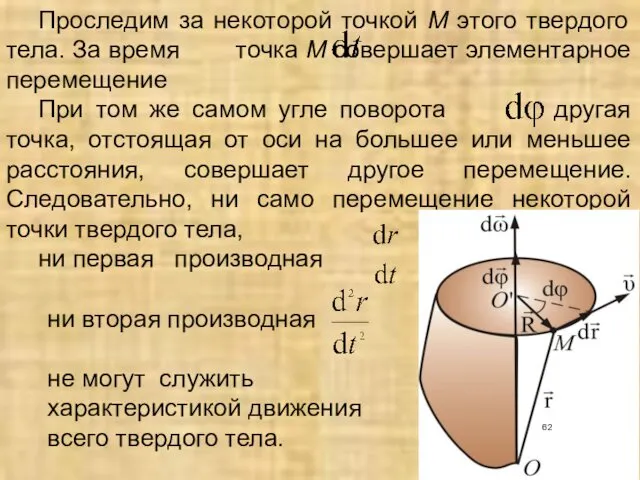
- 62. Проследим за некоторой точкой М этого твердого тела. За время точка М совершает элементарное перемещение При
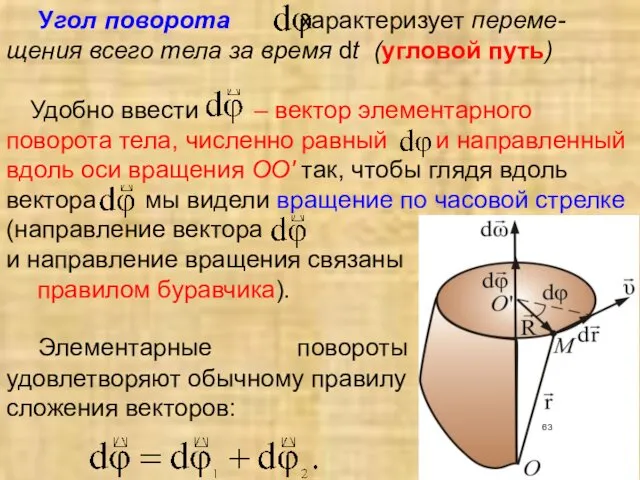
- 63. Угол поворота характеризует переме-щения всего тела за время dt (угловой путь) Удобно ввести – вектор элементарного
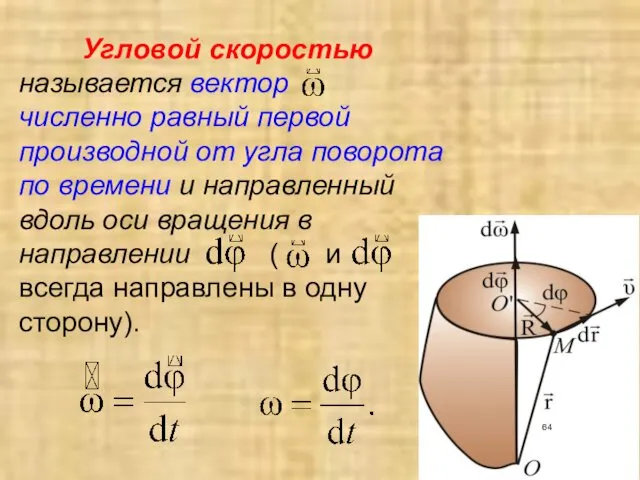
- 64. Угловой скоростью называется вектор численно равный первой производной от угла поворота по времени и направленный вдоль
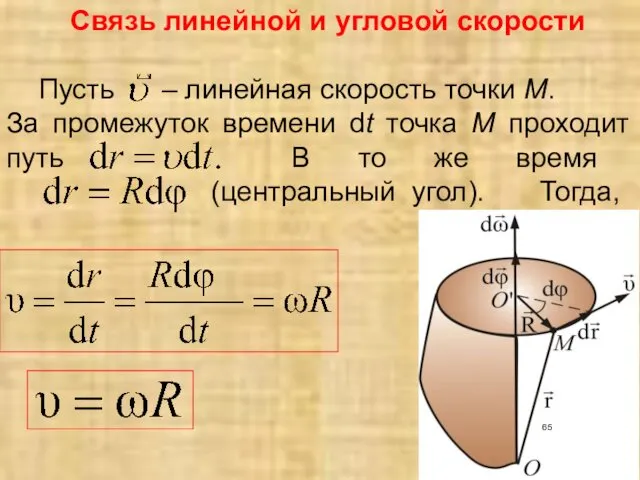
- 65. Связь линейной и угловой скорости Пусть – линейная скорость точки М. За промежуток времени dt точка
- 66. В векторной форме - Вектор ортогонален к векторам и и направлен в ту же сторону, что
- 67. Период Т – промежуток времени, в течение которого тело совершает полный оборот (т.е. поворот на угол
- 68. Введем вектор углового ускорения для характеристики неравномерного вращения тела: .(2.4.3) Вектор направлен в ту же сторону,
- 69. Выразим нормальное и тангенциальное ускорения точки М через угловую скорость и угловое ускорение:
- 70. Формулы простейших случаев вращения тела вокруг неподвижной оси: - равномерное вращение - равнопеременное вращение
- 71. Обратите внимание. Все кинематические параметры, характеризующие вращательное движение (угловое ускорение, угловая скорость и угол поворота) направлены
- 72. Связь между линейными и угловыми величинами при вращательном движении:
- 74. Примеры различных видов движения
- 77. Скачать презентацию
Тема 2. КИНЕМАТИКА ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
2.1. Понятие механики, модели в механике
2.2.
Тема 2. КИНЕМАТИКА ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
2.1. Понятие механики, модели в механике
2.2.
2.1. Понятие механики, разделы в механике
2.1. Понятие механики, разделы в механике
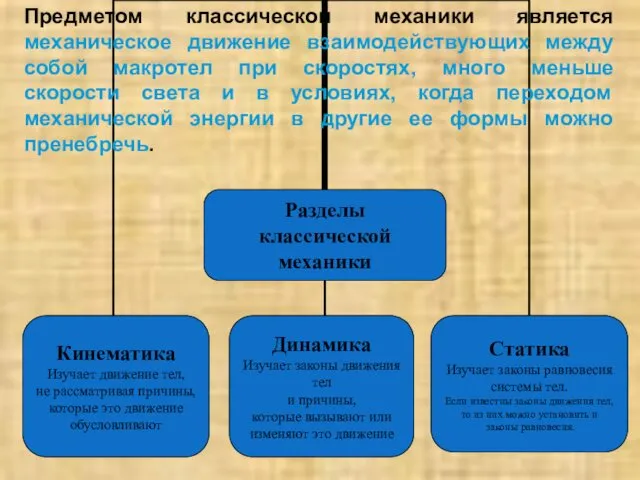
Предметом классической механики является механическое движение взаимодействующих между собой макротел при
Предметом классической механики является механическое движение взаимодействующих между собой макротел при
Кинематика (от греческого слова kinema – движение) – раздел механики, в
Кинематика (от греческого слова kinema – движение) – раздел механики, в
Модели в механике
Материальная точка
- тело, размерами, формой и внутренним строением
Модели в механике
Материальная точка
- тело, размерами, формой и внутренним строением
Без знаний механики невозможно представить себе развитие современного машиностроения.
Развитие механики,
Без знаний механики невозможно представить себе развитие современного машиностроения.
Развитие механики,
Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564
Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564
Галилео Галилей
(Galileo Galilei)
астроном, философ и физик.
Важнейшие роботы
Галилео Галилей
(Galileo Galilei)
астроном, философ и физик.
Важнейшие роботы
Исаак Ньютон
(Isaac Newton)
физик, математик, астроном, алхимик и философ
Важнейшие
Исаак Ньютон
(Isaac Newton)
физик, математик, астроном, алхимик и философ
Важнейшие
Альберт Эйнштейн
(Albert Einstein)
величайший ученый 20 века
Важнейшие работы:
теория относительности;
Альберт Эйнштейн
(Albert Einstein)
величайший ученый 20 века
Важнейшие работы:
теория относительности;
2.2. Система отсчета, тело отсчета
Всякое движение относительно, поэтому для описания движения
2.2. Система отсчета, тело отсчета
Всякое движение относительно, поэтому для описания движения
Система отсчета – совокупность системы координат и часов, связанных с телом
Система отсчета – совокупность системы координат и часов, связанных с телом
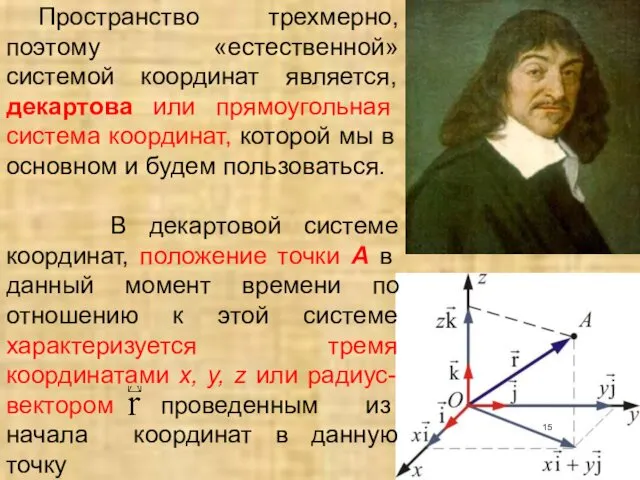
Пространство трехмерно, поэтому «естественной» системой координат является, декартова или прямоугольная система
Пространство трехмерно, поэтому «естественной» системой координат является, декартова или прямоугольная система
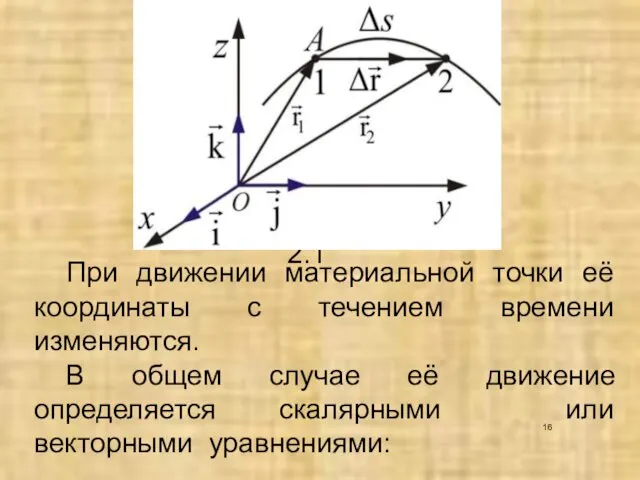
Рисунок 2.1
При движении материальной точки её координаты с течением времени изменяются.
В
Рисунок 2.1
При движении материальной точки её координаты с течением времени изменяются.
В
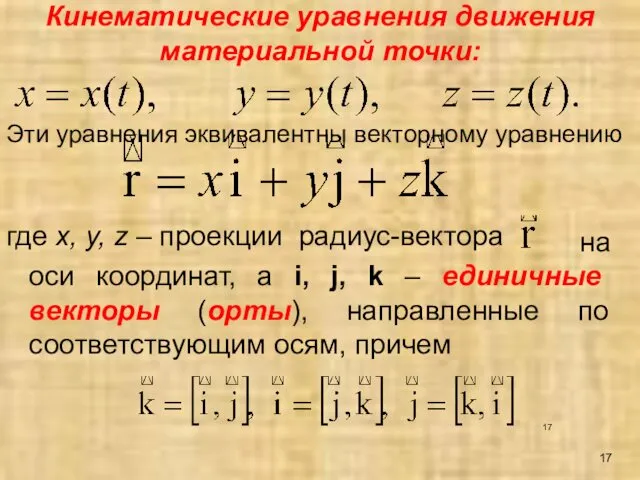
Кинематические уравнения движения материальной точки:
Эти уравнения эквивалентны векторному уравнению
где х, у,
Кинематические уравнения движения материальной точки:
Эти уравнения эквивалентны векторному уравнению
где х, у,
Число независимых координат, полностью определяющих положение точки в пространстве, называется числом
Число независимых координат, полностью определяющих положение точки в пространстве, называется числом
2.3. Кинематика материальной точки
2.3.1. Путь, перемещение
Положение точки А в пространстве можно
2.3. Кинематика материальной точки
2.3.1. Путь, перемещение
Положение точки А в пространстве можно
При движении точки А из точки 1 в точку 2 её
При движении точки А из точки 1 в точку 2 её
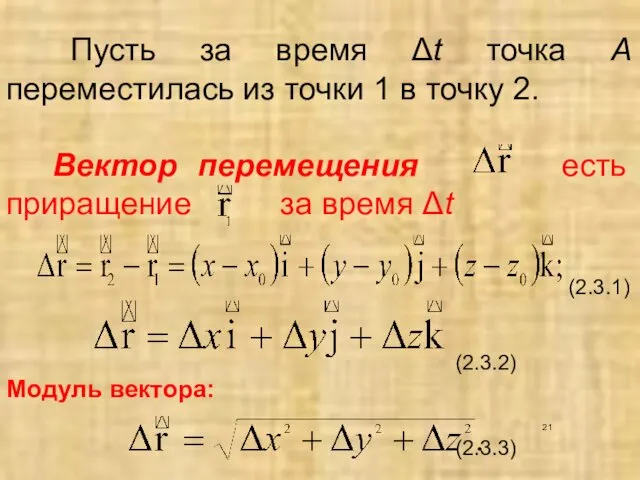
Пусть за время Δt точка А переместилась из точки 1 в
Пусть за время Δt точка А переместилась из точки 1 в
2.3.2. Скорость
2.3.2. Скорость
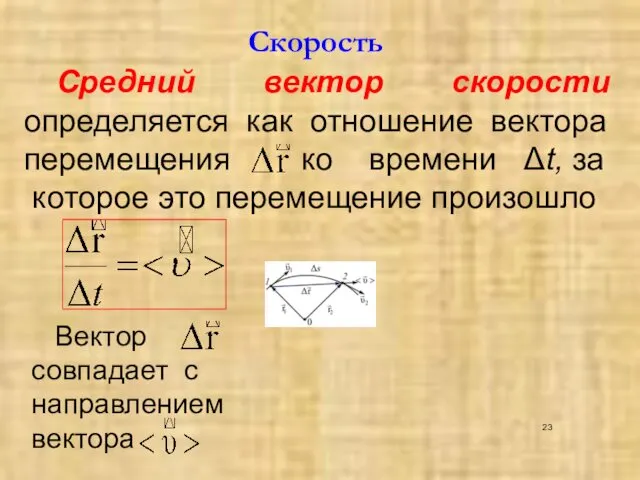
Скорость
Средний вектор скорости определяется как отношение вектора перемещения ко времени Δt,
Скорость
Средний вектор скорости определяется как отношение вектора перемещения ко времени Δt,
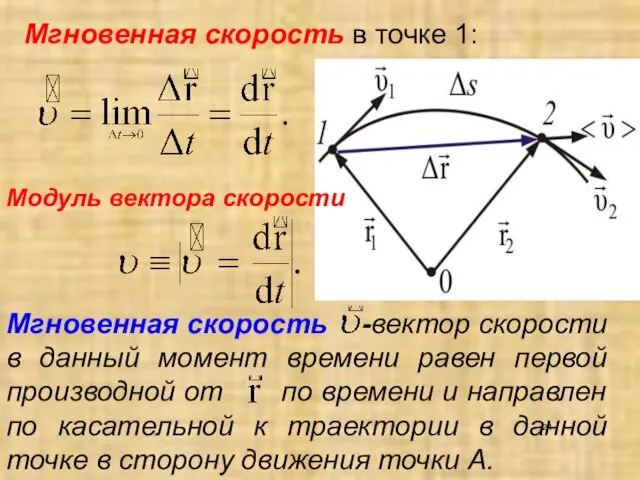
Мгновенная скорость -вектор скорости в данный момент времени равен первой производной
Мгновенная скорость -вектор скорости в данный момент времени равен первой производной
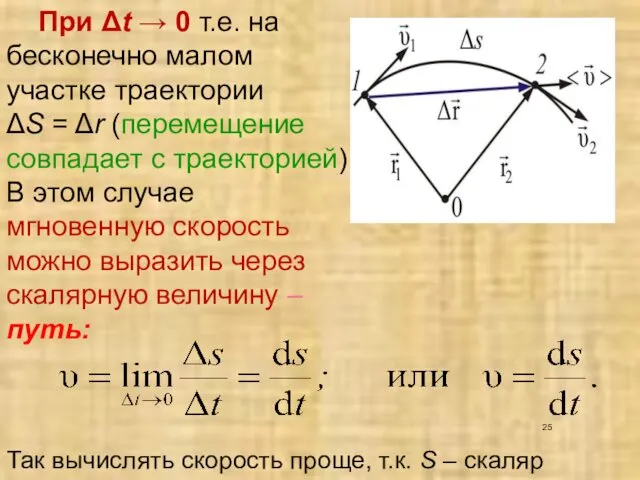
При Δt → 0 т.е. на бесконечно малом участке траектории
ΔS
При Δt → 0 т.е. на бесконечно малом участке траектории
ΔS
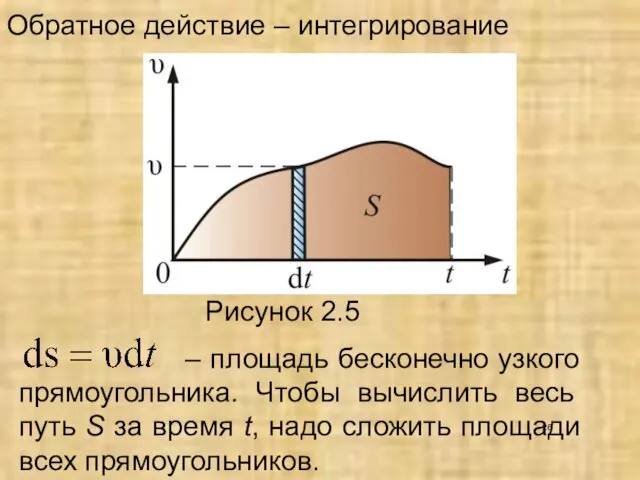
Обратное действие – интегрирование
Рисунок 2.5
– площадь бесконечно узкого прямоугольника. Чтобы
Обратное действие – интегрирование
Рисунок 2.5
– площадь бесконечно узкого прямоугольника. Чтобы
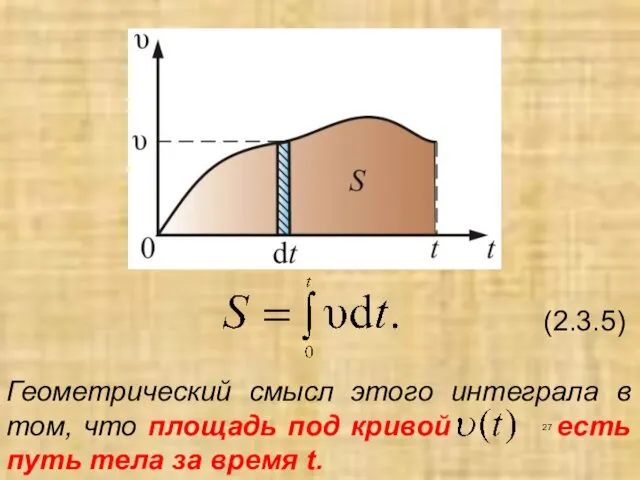
(2.3.5)
Геометрический смысл этого интеграла в том, что площадь под кривой
(2.3.5)
Геометрический смысл этого интеграла в том, что площадь под кривой
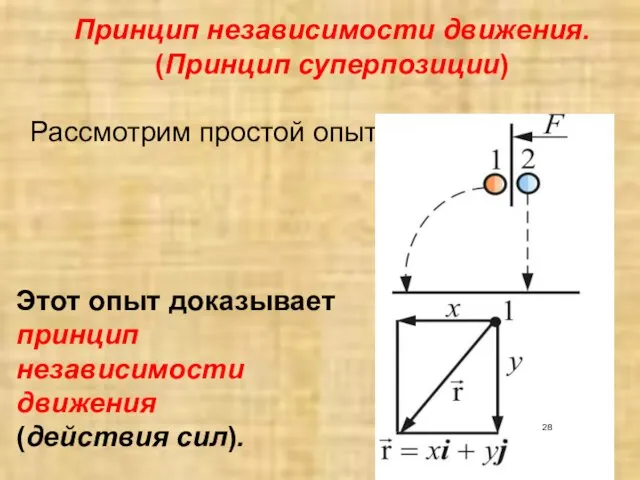
Принцип независимости движения.
(Принцип суперпозиции)
Рассмотрим простой опыт:
Этот опыт доказывает принцип независимости движения
Принцип независимости движения.
(Принцип суперпозиции)
Рассмотрим простой опыт:
Этот опыт доказывает принцип независимости движения
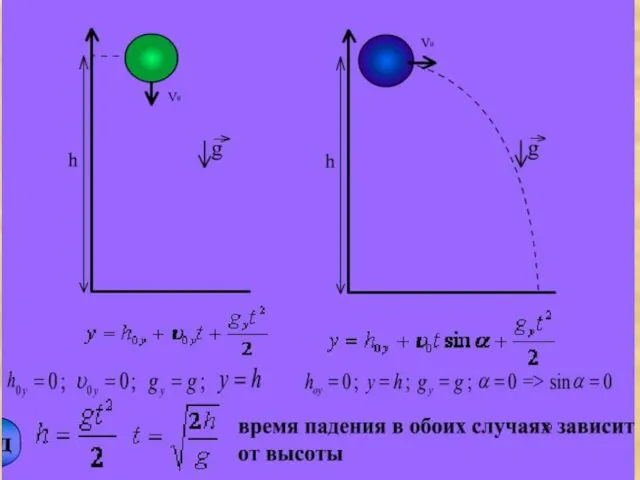
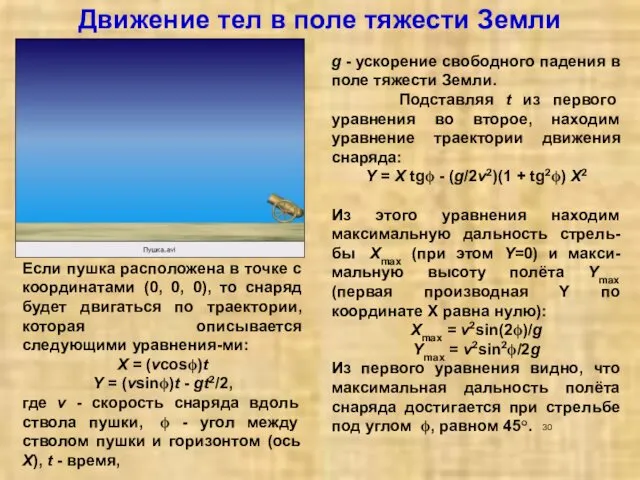
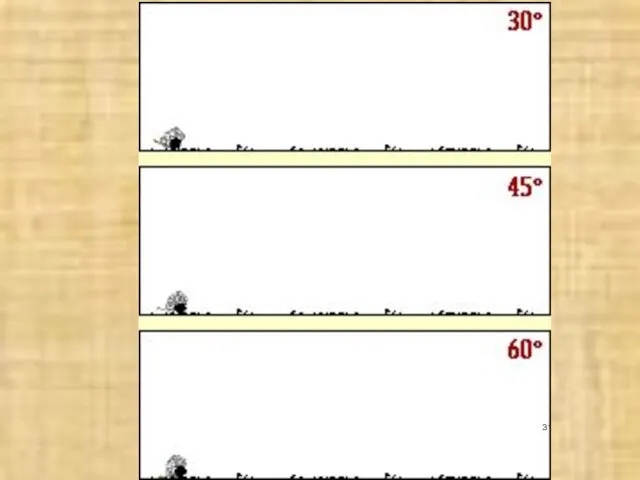
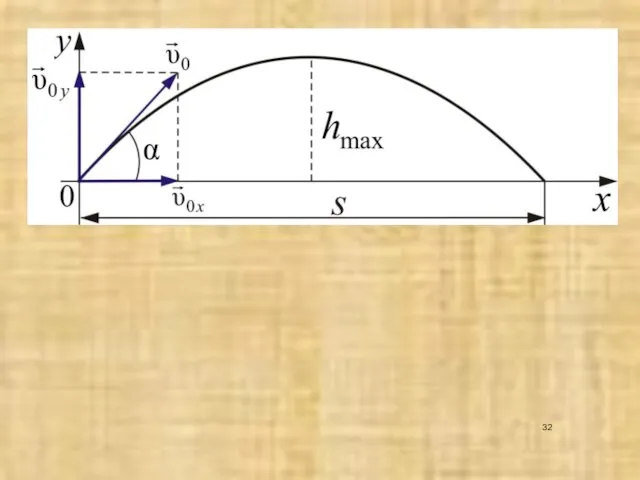
Движение тел в поле тяжести Земли
g - ускорение свободного падения в
Движение тел в поле тяжести Земли
g - ускорение свободного падения в
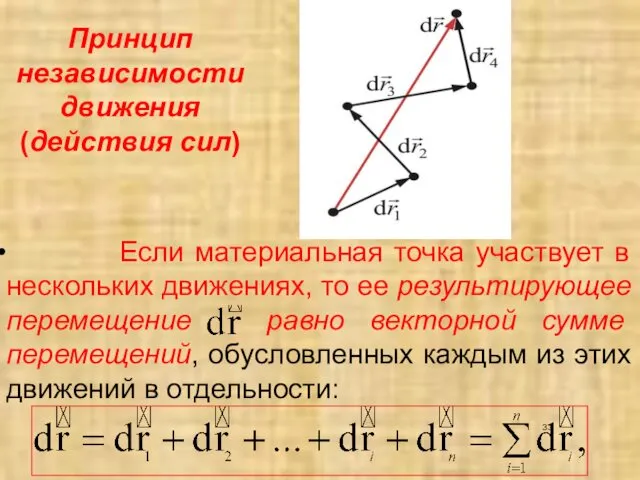
Если материальная точка участвует в нескольких движениях, то ее результирующее
Если материальная точка участвует в нескольких движениях, то ее результирующее
Так как
Тогда
Таким образом, скорость тоже подчиняется принципу независимости
Так как
Тогда
Таким образом, скорость тоже подчиняется принципу независимости
В физике существует общий принцип, который называется
принцип суперпозиции
результирующий эффект
В физике существует общий принцип, который называется
принцип суперпозиции
результирующий эффект
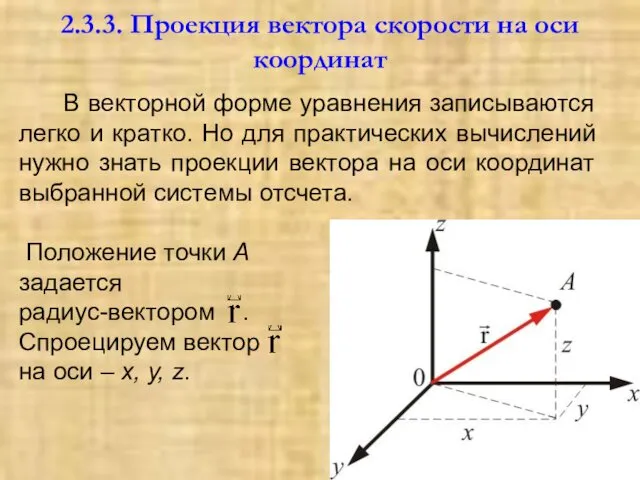
2.3.3. Проекция вектора скорости на оси координат
В векторной форме уравнения
2.3.3. Проекция вектора скорости на оси координат
В векторной форме уравнения
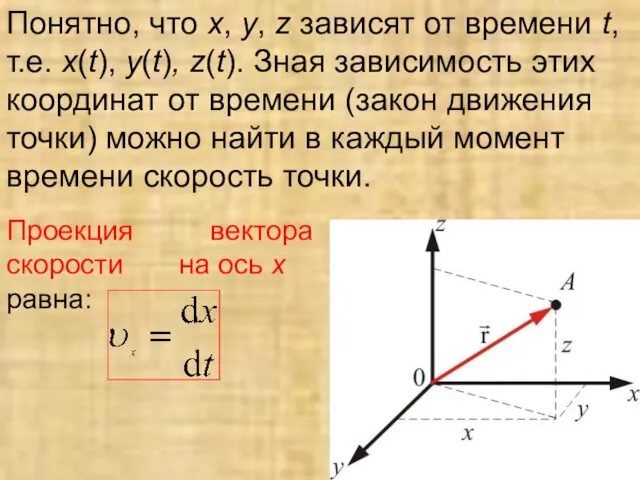
Понятно, что х, y, z зависят от времени t, т.е. x(t),
Понятно, что х, y, z зависят от времени t, т.е. x(t),
х
у
Z
Проекции вектора скорости на оси равны:
х
у
Z
Проекции вектора скорости на оси равны:
где i, j, k единичные векторы – орты.
(2.3.6)
Модуль вектора скорости:
Так
где i, j, k единичные векторы – орты.
(2.3.6)
Модуль вектора скорости:
Так
2.3.4. Ускорение. Нормальное и тангенциальное ускорения
В произвольном случае движения скорость не
2.3.4. Ускорение. Нормальное и тангенциальное ускорения
В произвольном случае движения скорость не
Введем единичный вектор (рисунок 2.9), связанный с точкой 1 и
Введем единичный вектор (рисунок 2.9), связанный с точкой 1 и
Найдем общее ускорение (как производную):
(2.3.8)
Получили два слагаемых ускорения:
–
Найдем общее ускорение (как производную):
(2.3.8)
Получили два слагаемых ускорения:
–
X
Y
Z
K
М
r(t)
L
v
a
τ
n
При произвольном движении
точки имеем:
aτ
an
O
X
Y
Z
K
М
r(t)
L
v
a
τ
n
При произвольном движении
точки имеем:
aτ
an
O
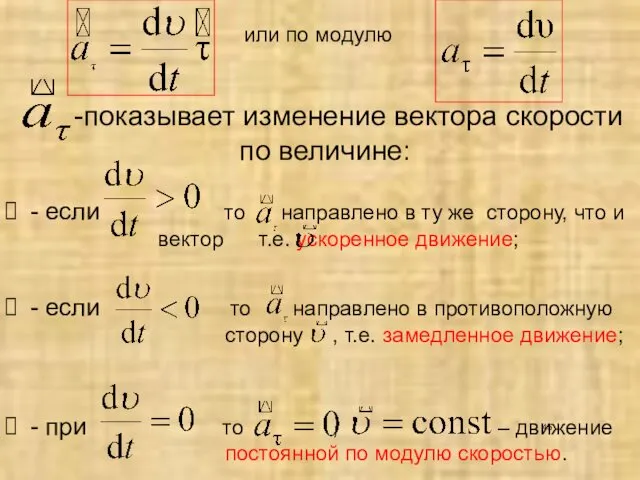
или по модулю
-показывает изменение вектора скорости по величине:
- если
или по модулю
-показывает изменение вектора скорости по величине:
- если
Рассмотрим подробнее второе слагаемое уравнения
т.е. нормальное ускорение:
Быстрота изменения направления касательной к
Рассмотрим подробнее второе слагаемое уравнения
т.е. нормальное ускорение:
Быстрота изменения направления касательной к
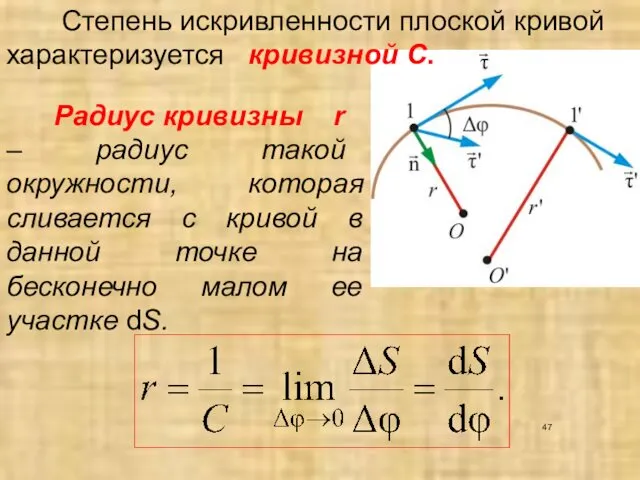
Радиус кривизны r
– радиус такой окружности, которая сливается с
Радиус кривизны r
– радиус такой окружности, которая сливается с
Ускорение при произвольном движении
При произвольном движении материальной точки величина r будет
Ускорение при произвольном движении
При произвольном движении материальной точки величина r будет
Скорость изменения направления касательной можно выразить как произведение скорости изменения
Скорость изменения направления касательной можно выразить как произведение скорости изменения
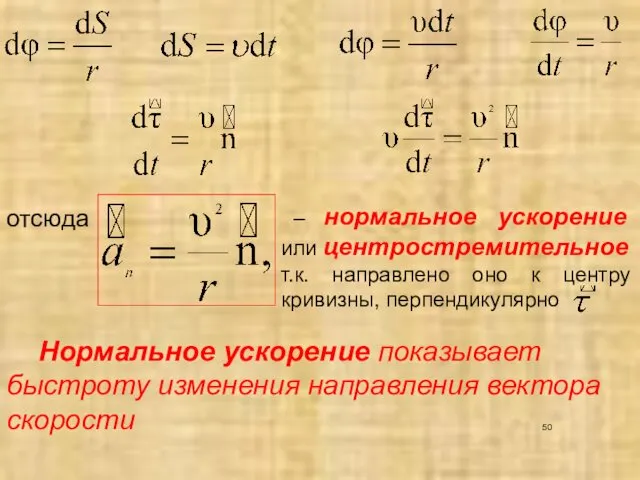
отсюда
– нормальное ускорение или центростремительное
т.к. направлено оно
отсюда
– нормальное ускорение или центростремительное
т.к. направлено оно
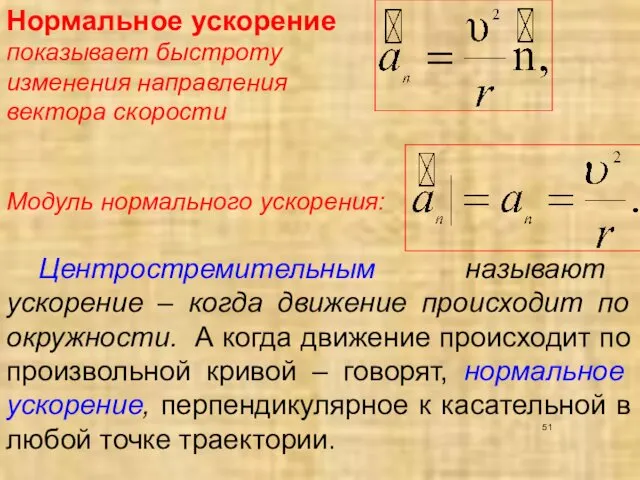
Центростремительным называют ускорение – когда движение происходит по окружности. А когда
Центростремительным называют ускорение – когда движение происходит по окружности. А когда
r
v
a
an
aτ
Суммарный вектор ускорения при движении точки вдоль плоской кривой равен:
Модуль общего
r
v
a
an
aτ
Суммарный вектор ускорения при движении точки вдоль плоской кривой равен:
Модуль общего
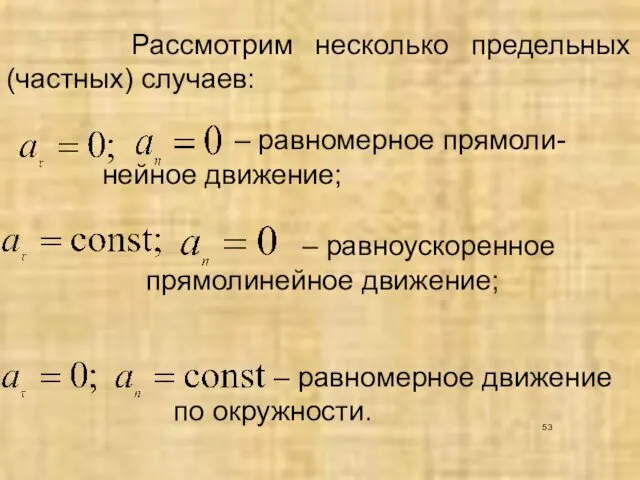
Рассмотрим несколько предельных (частных) случаев:
– равномерное прямоли- нейное движение;
Рассмотрим несколько предельных (частных) случаев:
– равномерное прямоли- нейное движение;
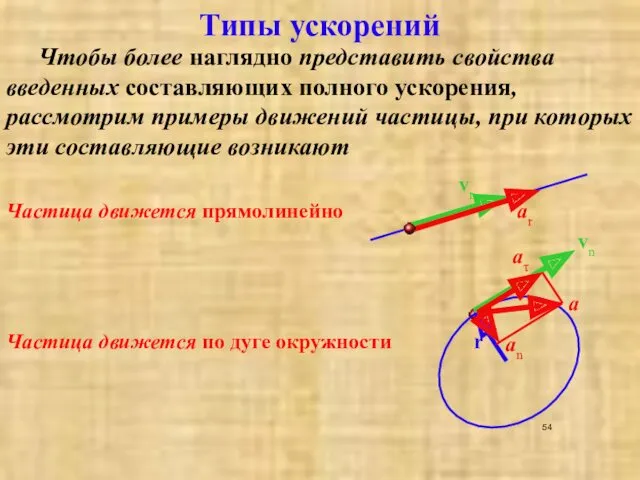
Типы ускорений
Частица движется прямолинейно
Чтобы более наглядно представить свойства введенных составляющих полного
Типы ускорений
Частица движется прямолинейно
Чтобы более наглядно представить свойства введенных составляющих полного
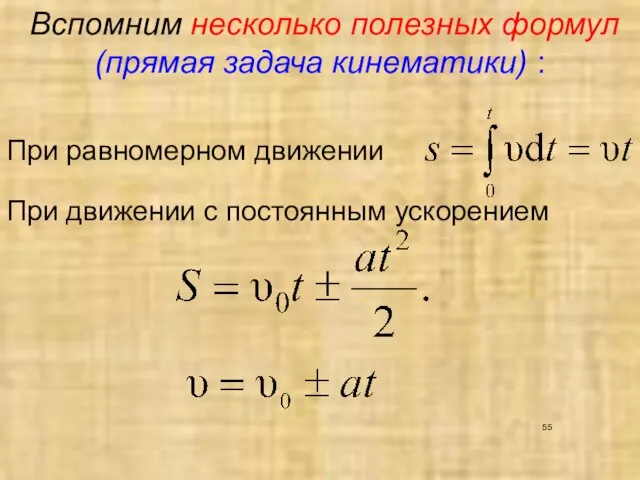
Вспомним несколько полезных формул
(прямая задача кинематики) :
При равномерном движении
Вспомним несколько полезных формул
(прямая задача кинематики) :
При равномерном движении
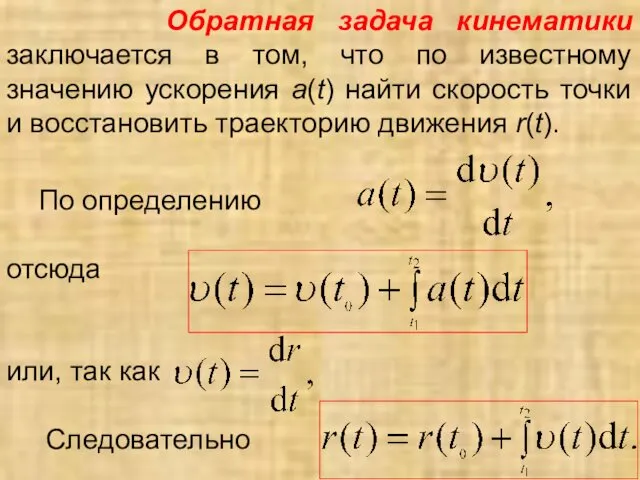
По определению
отсюда
или, так как
Следовательно
Обратная задача кинематики заключается
По определению
отсюда
или, так как
Следовательно
Обратная задача кинематики заключается
2.4. Кинематика твердого тела
Различают пять видов движения твердого тела:
- поступательное;
- вращательное
2.4. Кинематика твердого тела
Различают пять видов движения твердого тела:
- поступательное;
- вращательное
2.4.1. Поступательное движение твердого тела
Поступательное движение – это такое движение твердого
2.4.1. Поступательное движение твердого тела
Поступательное движение – это такое движение твердого
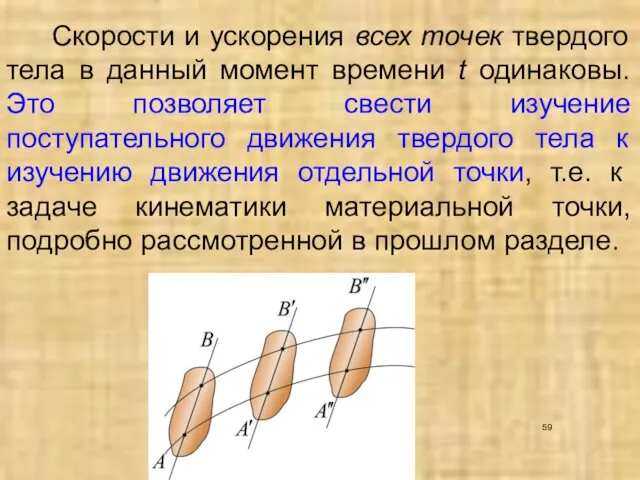
Скорости и ускорения всех точек твердого тела в данный момент
Скорости и ускорения всех точек твердого тела в данный момент
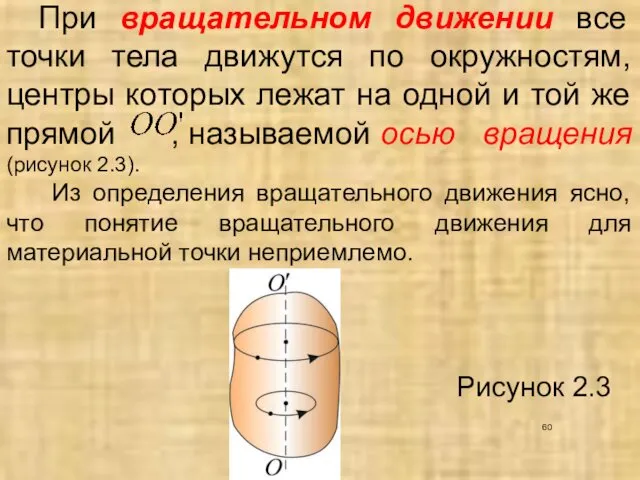
При вращательном движении все точки тела движутся по окружностям, центры которых
При вращательном движении все точки тела движутся по окружностям, центры которых
2.4.2. Вращательное движение вокруг неподвижной оси
Движение твердого тела, при котором две
2.4.2. Вращательное движение вокруг неподвижной оси
Движение твердого тела, при котором две
Проследим за некоторой точкой М этого твердого тела. За время точка
Проследим за некоторой точкой М этого твердого тела. За время точка
Угол поворота характеризует переме-щения всего тела за время dt (угловой путь)
Удобно
Угол поворота характеризует переме-щения всего тела за время dt (угловой путь)
Удобно
Угловой скоростью называется вектор численно равный первой производной от угла
Угловой скоростью называется вектор численно равный первой производной от угла
Связь линейной и угловой скорости
Пусть – линейная скорость точки М.
Связь линейной и угловой скорости
Пусть – линейная скорость точки М.
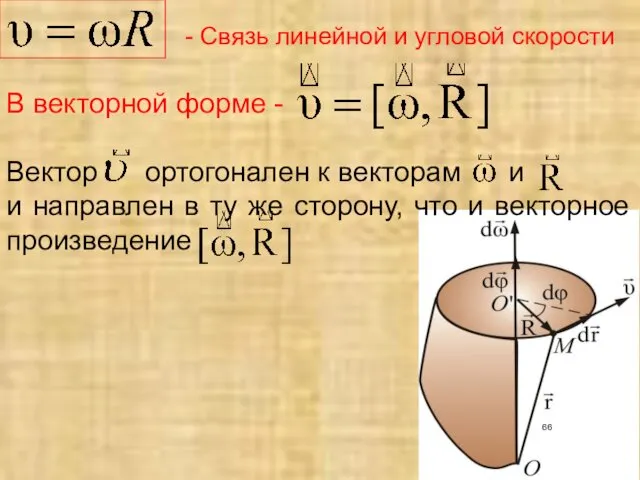
В векторной форме -
Вектор ортогонален к векторам и
и направлен
В векторной форме -
Вектор ортогонален к векторам и
и направлен
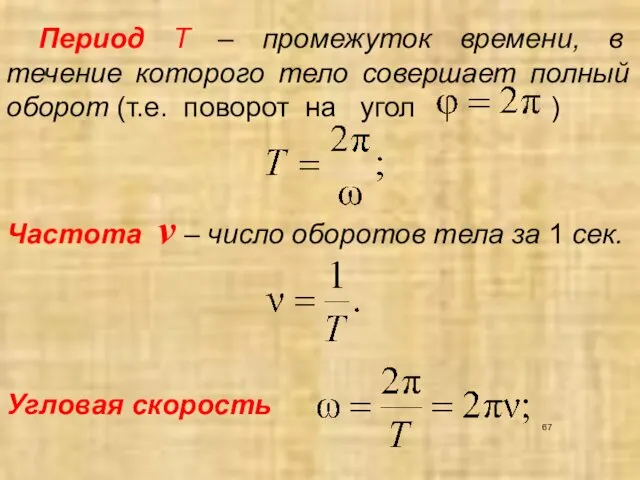
Период Т – промежуток времени, в течение которого тело совершает полный
Период Т – промежуток времени, в течение которого тело совершает полный

Введем вектор углового ускорения
для характеристики неравномерного вращения тела:
.(2.4.3)
Вектор направлен
Введем вектор углового ускорения
для характеристики неравномерного вращения тела:
.(2.4.3)
Вектор направлен

Выразим нормальное и тангенциальное ускорения точки М через угловую скорость и
Выразим нормальное и тангенциальное ускорения точки М через угловую скорость и
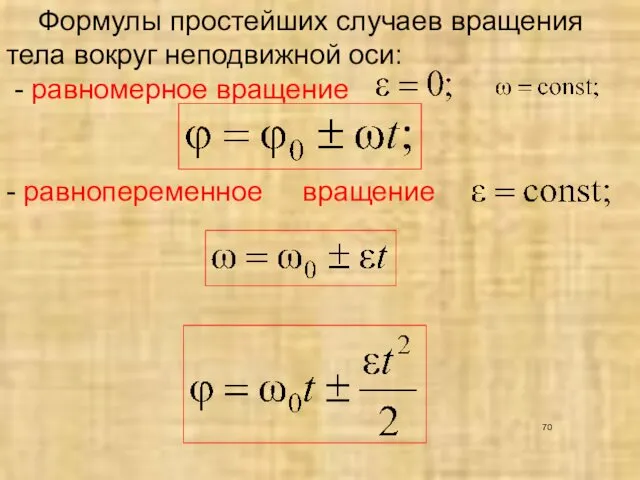
Формулы простейших случаев вращения тела вокруг неподвижной оси:
- равномерное вращение
Формулы простейших случаев вращения тела вокруг неподвижной оси:
- равномерное вращение
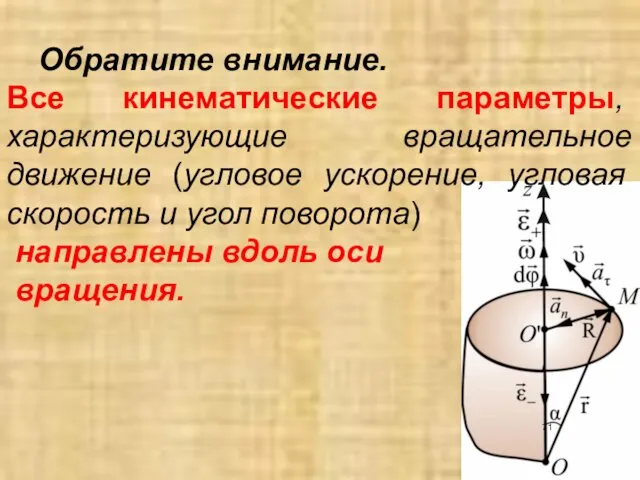
Обратите внимание.
Все кинематические параметры, характеризующие вращательное движение (угловое ускорение, угловая
Обратите внимание.
Все кинематические параметры, характеризующие вращательное движение (угловое ускорение, угловая
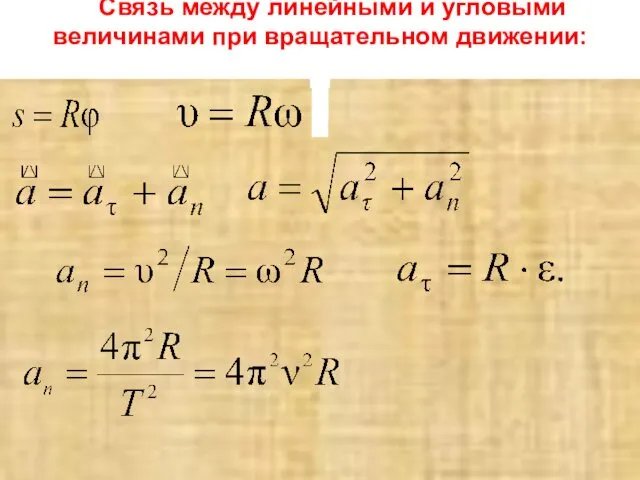
Связь между линейными и угловыми величинами при вращательном движении:
Связь между линейными и угловыми величинами при вращательном движении:
Примеры различных видов движения
Примеры различных видов движения
 Нагревание проводников электрическим током. Закон Джоуля-Ленца
Нагревание проводников электрическим током. Закон Джоуля-Ленца Типы волоконной оптики, способы изготовления и применения
Типы волоконной оптики, способы изготовления и применения Презентация по теме Разделы механики для 10 класса
Презентация по теме Разделы механики для 10 класса презентация Сообщающиеся сосуды
презентация Сообщающиеся сосуды Тема №5. Энергетические системы самолета. Занятие №2. Гидравлическая система самолета МИГ-29. Общая гидросистема
Тема №5. Энергетические системы самолета. Занятие №2. Гидравлическая система самолета МИГ-29. Общая гидросистема The fuel system
The fuel system Презентация к уроку Что изучает физика. Физические явления (7 класс)
Презентация к уроку Что изучает физика. Физические явления (7 класс) Физические величины в электроэнергетике, их размерности
Физические величины в электроэнергетике, их размерности Сила тока в различных участках параллельной цепи
Сила тока в различных участках параллельной цепи Явление электромагнитной индукции
Явление электромагнитной индукции Свойства магнита. Исследовательская работа дошкольников
Свойства магнита. Исследовательская работа дошкольников 20231011_elektrizatsiya1
20231011_elektrizatsiya1 Магнит өрісінің тогы бар өткізгішке әрекеті. Электрқозғалтқыштар. Электр өлшеуіш аспаптар
Магнит өрісінің тогы бар өткізгішке әрекеті. Электрқозғалтқыштар. Электр өлшеуіш аспаптар Оценка снижения экологического воздействия энергетики при реализации ЗЯТЦ в проекте БРЕСТ
Оценка снижения экологического воздействия энергетики при реализации ЗЯТЦ в проекте БРЕСТ Есептеу әдістемесі мен механикалық құралжабдықтарды таңдау
Есептеу әдістемесі мен механикалық құралжабдықтарды таңдау Эволюция физических картин мира. (Лекция 3)
Эволюция физических картин мира. (Лекция 3) Аэродинамика автомобиля
Аэродинамика автомобиля Оќыту процессінде композициялыќ жобалау єдісін ќолдану
Оќыту процессінде композициялыќ жобалау єдісін ќолдану Количество теплоты
Количество теплоты Тепловые процессы. Теплообменники. Нагрев острым паром
Тепловые процессы. Теплообменники. Нагрев острым паром Балочные системы. (Тема 1.4)
Балочные системы. (Тема 1.4) Магнитное поле
Магнитное поле Закон всемирного тяготения
Закон всемирного тяготения Теплообмен в металлургических агрегатах
Теплообмен в металлургических агрегатах Презентация к уроку по физике Скорость 7 класс
Презентация к уроку по физике Скорость 7 класс Тренажер по теме МКТ к уроку Газовые законы
Тренажер по теме МКТ к уроку Газовые законы Термодинамика диэлектриков. Типы диэлектриков, свойства и применение. Лекция №5
Термодинамика диэлектриков. Типы диэлектриков, свойства и применение. Лекция №5 Устройство скутера
Устройство скутера