- Классическая механика. Тема 1

Содержание
- 2. Основная литература: учебники 1. Савельев И.В. Курс общей физики: Т.1. Механика. Молекулярная физика.– М.: Наука, 2005.–
- 3. Раздел 1. Классическая и релятивистская механика Темы лекций Кинематика поступательного и вращательного движений. Динамика поступательного движения.
- 4. Тема 1. Классическая механика План лекции 1.1. Введение. Предмет физики 1.2. Кинематика поступательного движения материальной точки
- 5. 1.1. Введение. Предмет физики Физика – в переводе с греческого «Природа» Современная физика есть наука о
- 6. Механика Классическая Квантовая Теория относительности СТО ОТО
- 7. 1.2. Кинематика поступательного движения материальной точки Механическое движение – это процесс изменения расположения тел или их
- 8. Объекты классической механики Классическая механика изучает макроскопические тела, движущиеся с малыми скоростями,. Макроскопические тела (макрочастицы), движущиеся
- 9. Разделы механики Механика состоит из трех разделов – кинематики, динамики и статики. Кинематика изучает виды движений,
- 10. Основные понятия механики Механическое движение – изменение положения тел друг относительно друга. Тело отсчёта - тело,
- 11. Радиус-вектор . Описать движение материальной точки – значит знать её положение относительно выбранной системы отсчета в
- 12. Спроецируем на оси координат: - орты осей Х,У,Z
- 13. – проекции вектора на эти оси. X, У, Z называются декартовыми координатами материальной точки. Модуль радиус-вектора
- 14. Закон движения В процессе движения материальной точки её радиус-вектор изменяется по величине и направлению. Законом движения
- 15. Кинематические уравнения движения Закон движения, записанный в скалярной форме, представляет систему уравнений движения материальной точки. Х=
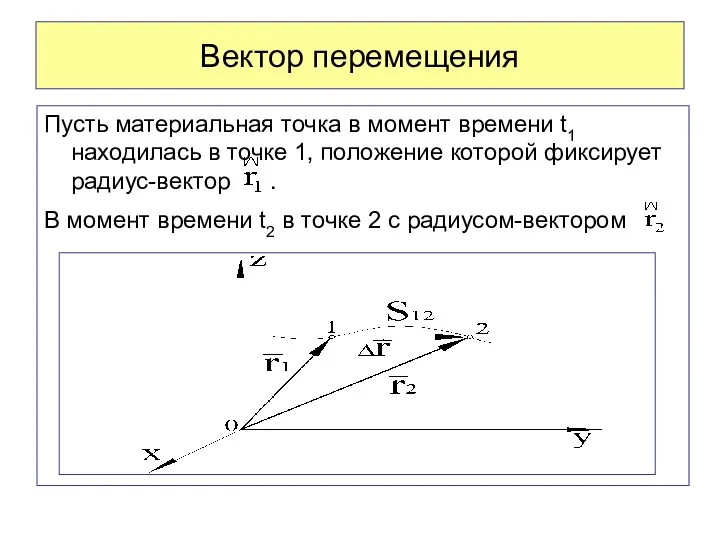
- 16. Вектор перемещения Пусть материальная точка в момент времени t1 находилась в точке 1, положение которой фиксирует
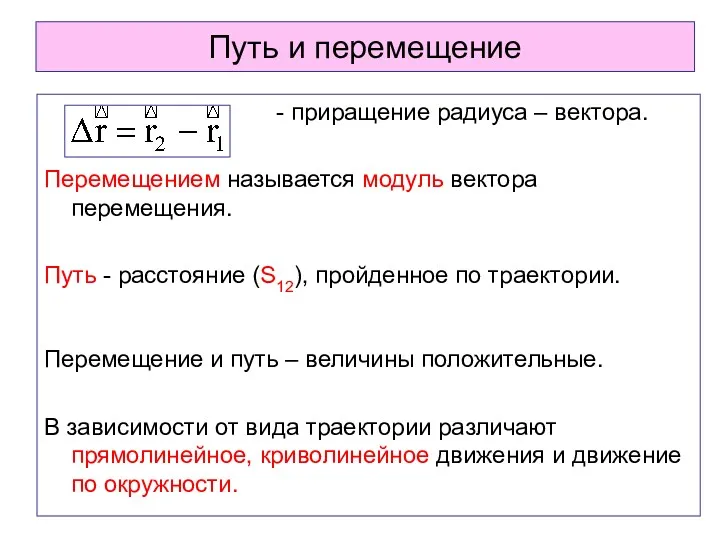
- 17. Путь и перемещение - приращение радиуса – вектора. Перемещением называется модуль вектора перемещения. Путь - расстояние
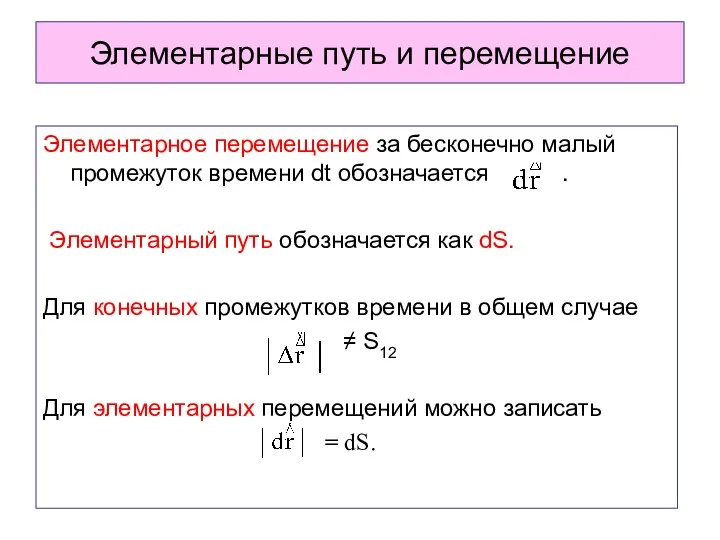
- 18. Элементарные путь и перемещение Элементарное перемещение за бесконечно малый промежуток времени dt обозначается . Элементарный путь
- 19. Вектор перемещения получим, просуммировав элементарные перемещения:
- 20. При интегрировании (суммировании) модулей элементарных перемещений получим путь.
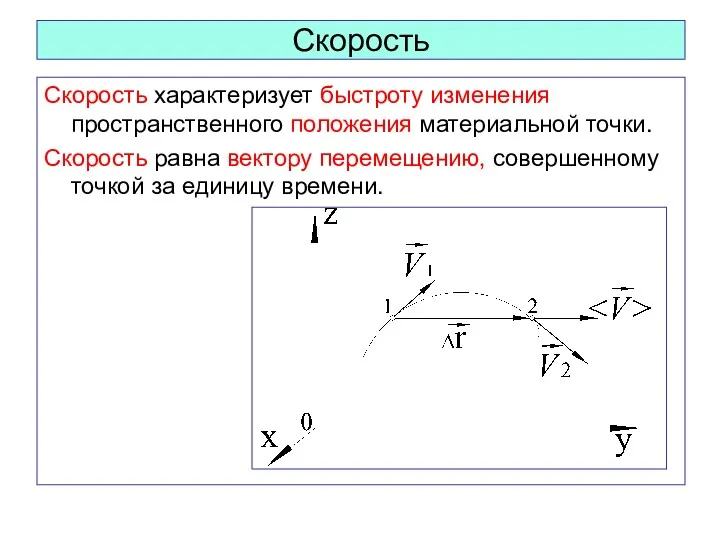
- 21. Скорость Скорость характеризует быстроту изменения пространственного положения материальной точки. Скорость равна вектору перемещению, совершенному точкой за
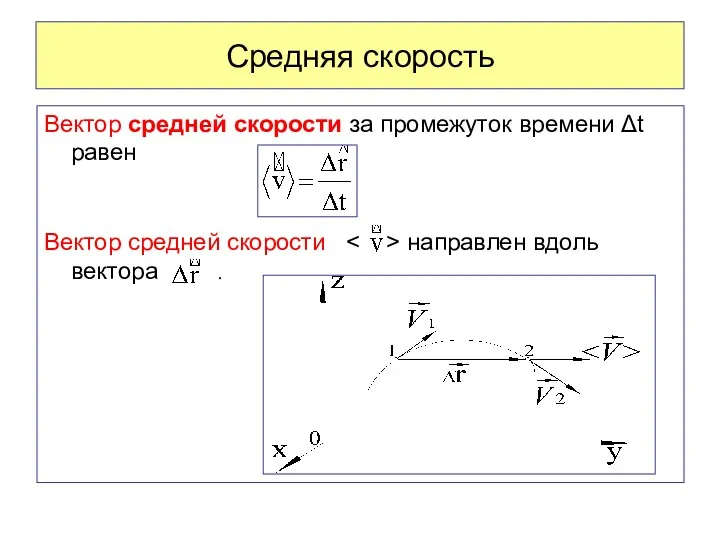
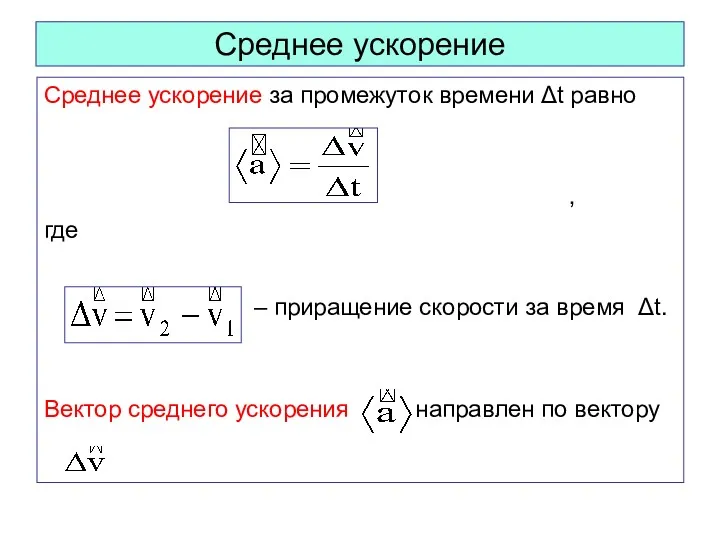
- 22. Средняя скорость Вектор средней скорости за промежуток времени Δt равен Вектор средней скорости направлен вдоль вектора
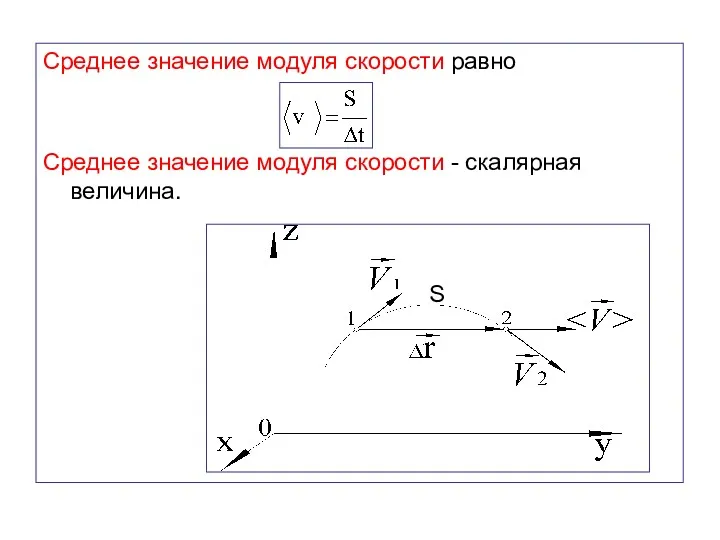
- 23. Среднее значение модуля скорости равно Среднее значение модуля скорости - скалярная величина. S
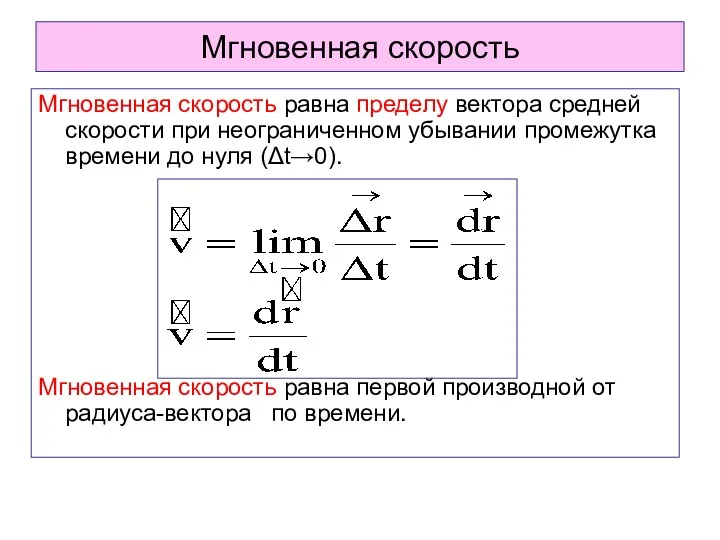
- 24. Мгновенная скорость Мгновенная скорость равна пределу вектора средней скорости при неограниченном убывании промежутка времени до нуля
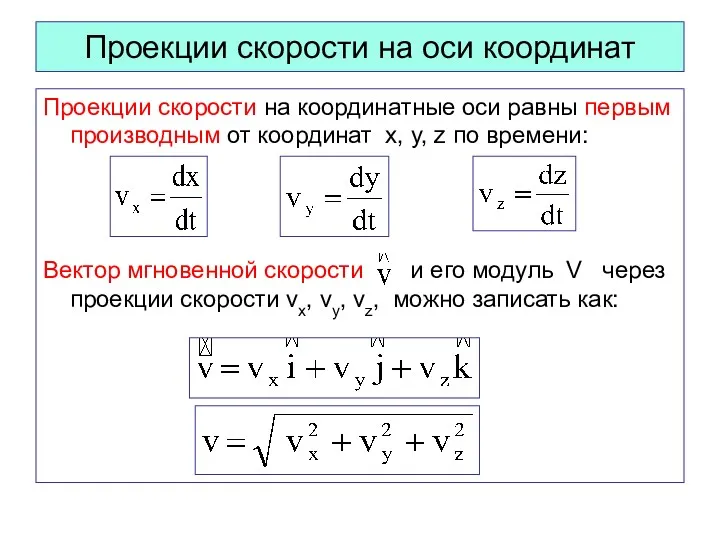
- 25. Вектор мгновенной скорости направлен по вектору , т. е. по касательной к траектории. Модуль мгновенной скорости
- 26. Направление средней и мгновенной скоростей
- 27. Проекции скорости на оси координат Проекции скорости на координатные оси равны первым производным от координат x,
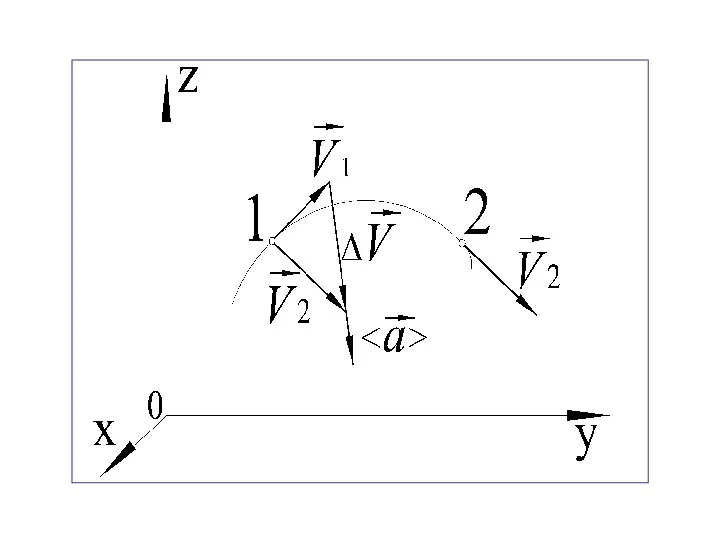
- 28. Ускорение В процессе движения материальной точки модуль и направление её скорости в общем случае изменяются. Ускорение
- 29. Среднее ускорение Среднее ускорение за промежуток времени Δt равно , где – приращение скорости за время
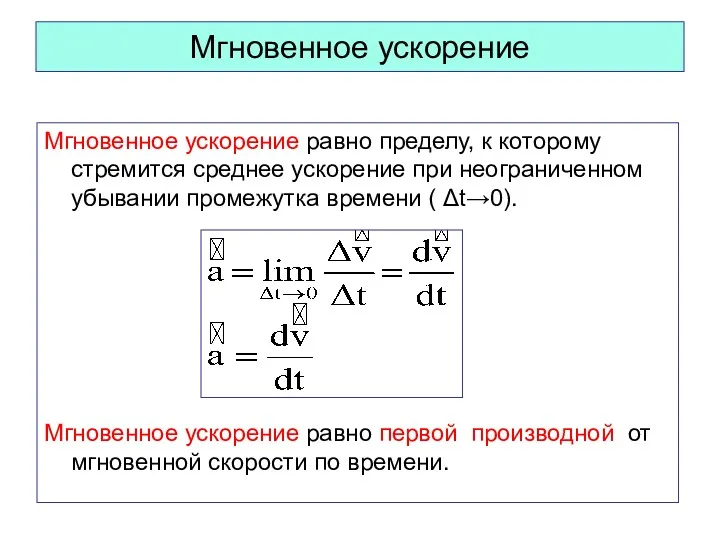
- 31. Мгновенное ускорение Мгновенное ускорение равно пределу, к которому стремится среднее ускорение при неограниченном убывании промежутка времени
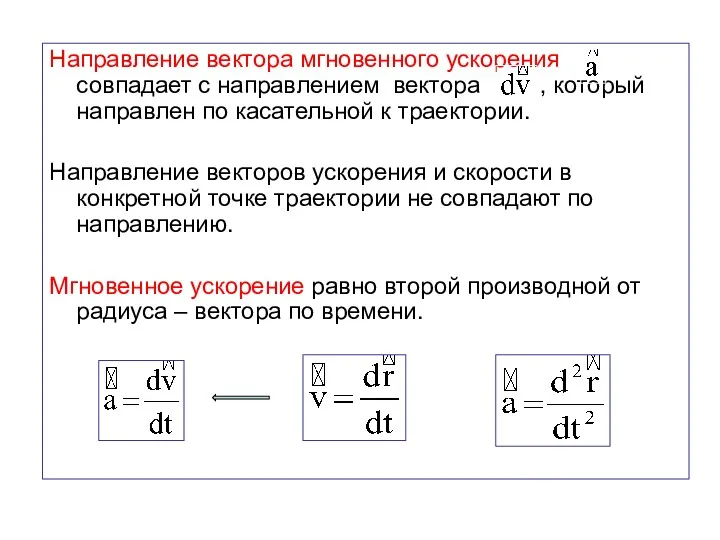
- 32. Направление вектора мгновенного ускорения совпадает с направлением вектора , который направлен по касательной к траектории. Направление
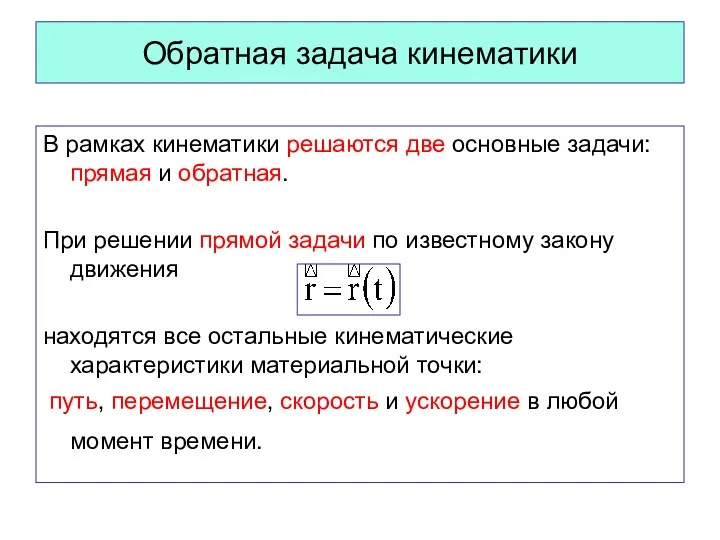
- 33. Обратная задача кинематики В рамках кинематики решаются две основные задачи: прямая и обратная. При решении прямой
- 34. При решении обратной задачи по известной зависимости ускорения от времени , находят положение материальной точки на
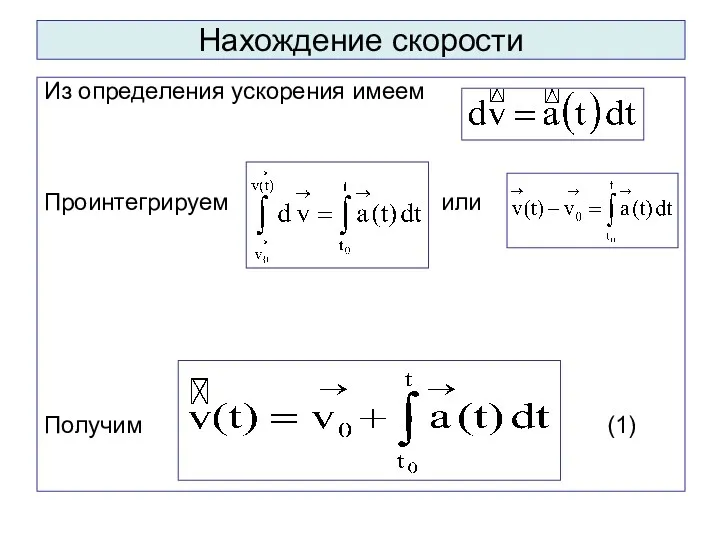
- 35. Нахождение скорости Из определения ускорения имеем Проинтегрируем или Получим (1)
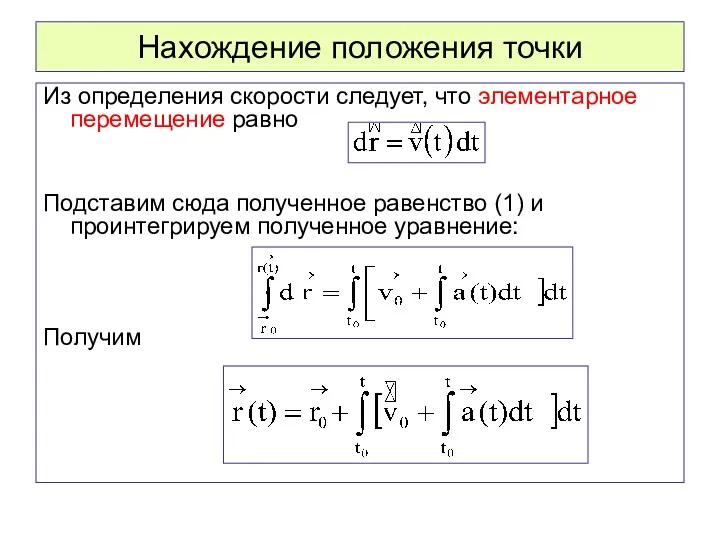
- 36. Нахождение положения точки Из определения скорости следует, что элементарное перемещение равно Подставим сюда полученное равенство (1)
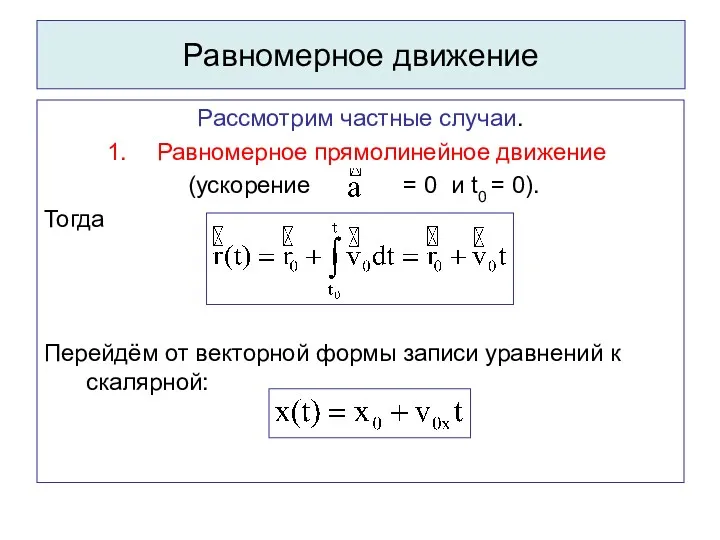
- 37. Равномерное движение Рассмотрим частные случаи. Равномерное прямолинейное движение (ускорение = 0 и t0 = 0). Тогда
- 38. Равноускоренное движение 2. Равнопеременное прямолинейное движение (ускорение = const и t0 = 0). Тогда Полученное выражение,
- 39. 1.3. Тангенциальное и нормальное ускорения Пусть материальная точка движется по криволинейной траектории, имея различную скорость в
- 40. Вектор ускорения можно разложить на два направления: касательное к траектории и перпендикулярное к ней ( т.е.
- 41. Тангенциальное ускорение характеризует изменение скорости по модулю. Модуль тангенциального ускорения равен модулю первой производной от скорости
- 42. Нормальное ускорение характеризует изменение скорости по направлению. Модуль нормального ускорения равен: Нормальное ускорение направлено перпендикулярно скорости
- 43. Полное ускорение Полное ускорение материальной точки. Модуль полного ускорения:
- 44. Движение – равноускоренное, если модуль тангенциального ускорения положителен. При этом тангенциальное ускорение направлено по вектору скорости.
- 45. Частные случаи движений = 0, = 0 - это равномерное прямолинейное движение; = const, = 0
- 46. = 0, = f(t) - равномерное криволинейное движение; 5. = f(t), = f(t) - неравномерное криволинейное
- 47. 1.4. Кинематика вращательного движения твердого тела. 1.4.1. Поступательное и вращательное движение Любое движение абсолютно твердого тела
- 48. При поступательном движении все точки тела движутся одинаково, поэтому движение тела можно охарактеризовать движением одной точки(например,
- 49. Вращательным движением твердого тела вокруг неподвижной оси называется такое движение, при котором все точки тела движутся
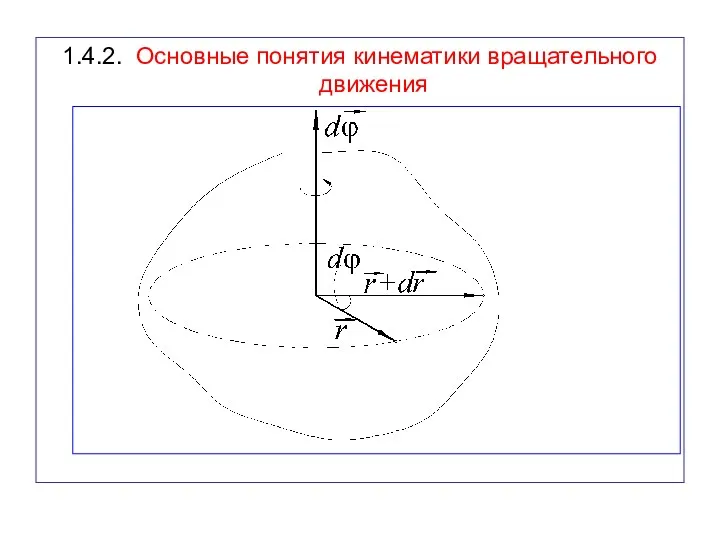
- 50. 1.4.2. Основные понятия кинематики вращательного движения
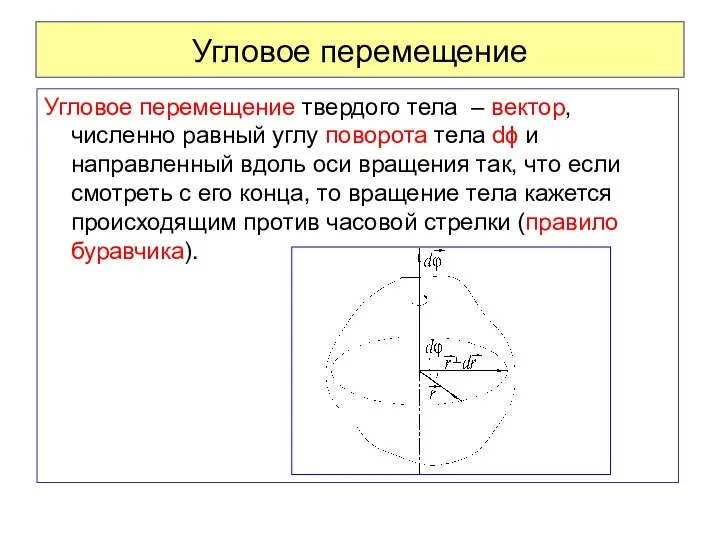
- 51. Угловое перемещение Угловое перемещение твердого тела – вектор, численно равный углу поворота тела dϕ и направленный
- 52. Быстроту изменения углового перемещения с течением времени характеризует угловая скорость. Средняя угловая скорость твердого тела численно
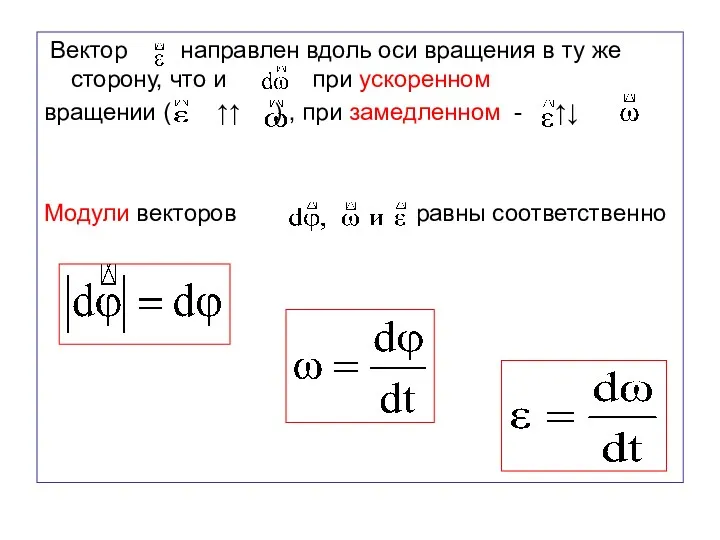
- 53. Мгновенная угловая скорость равна первой производной от углового перемещения по времени. Угловая скорость измеряется в рад/с.
- 54. Направление векторов
- 55. Быстроту изменения угловой скорости с течением времени характеризует угловое ускорение. Среднее угловое ускорение твердого тела равно
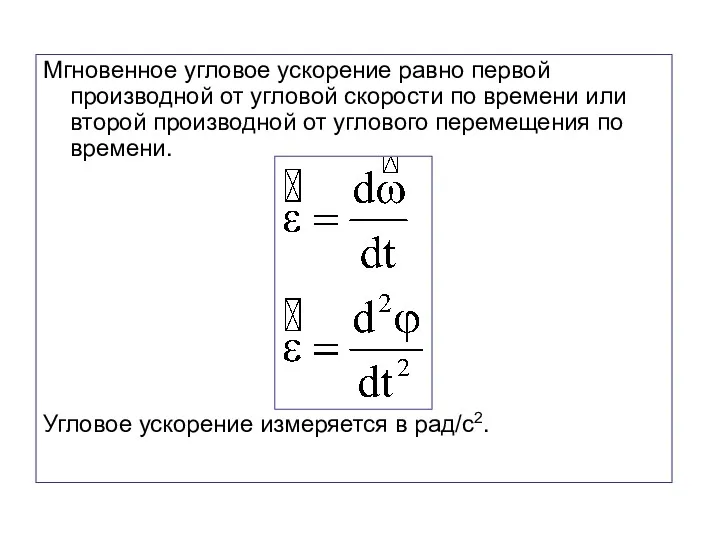
- 56. Мгновенное угловое ускорение равно первой производной от угловой скорости по времени или второй производной от углового
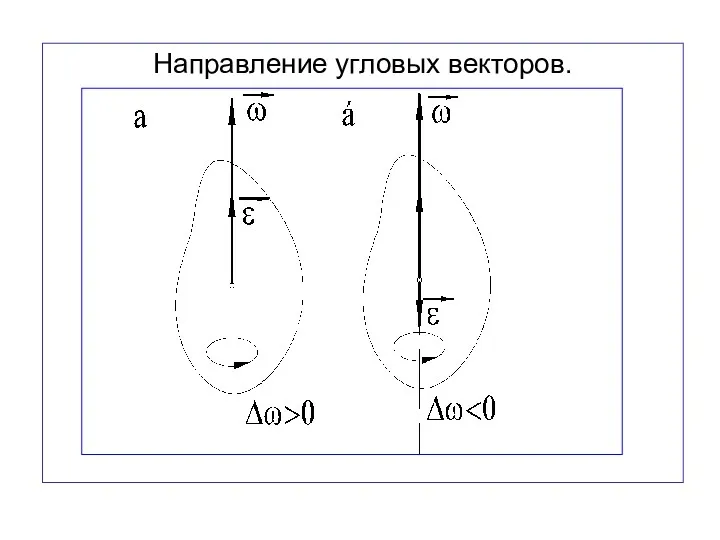
- 57. Направление угловых векторов.
- 58. Вектор направлен вдоль оси вращения в ту же сторону, что и при ускоренном вращении ( ↑↑
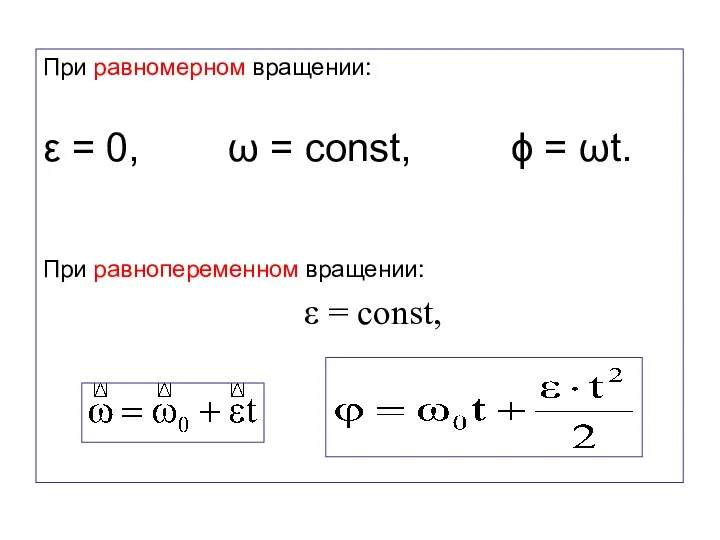
- 59. При равномерном вращении: ε = 0, ω = const, ϕ = ωt. При равнопеременном вращении: ε
- 60. 1.4.3. Взаимосвязь угловых и линейных величин Кроме угловых величин: углового перемещения, угловой скорости и углового ускорения
- 61. Пусть за время dt произвольная точка твердого тела М переместится на , пройдя путь dS. При
- 62. Направление перпендикулярно к и к . Если смотреть с конца , то поворот от к происходит
- 63. Вектор элементарного перемещения: Разделим это соотношение на dt: Учтём, что Получим Линейная скорость данной точки твёрдого
- 64. Продифференцируем выражения для v по времени: Учтём, что – линейное ускорение, – угловое ускорение, - линейная
- 65. Первый вектор в правой части - тангенциальное ускорение. Он характеризует изменение модуля линейной скорости. Тангенциальное ускорение
- 66. Второй вектор в правой части равенства – нормальное ускорение. Оно направлено к центру окружности. Оно характеризует
- 68. Сравнительная таблица формул Поступательное Вращательное 1. Равномерное S = Vt ϕ = ωt V = const
- 70. Скачать презентацию
Основная литература: учебники
1. Савельев И.В. Курс общей физики: Т.1. Механика.
Основная литература: учебники
1. Савельев И.В. Курс общей физики: Т.1. Механика.
Раздел 1.
Классическая и релятивистская
механика
Темы лекций
Кинематика поступательного и вращательного движений.
Динамика
Раздел 1.
Классическая и релятивистская
механика
Темы лекций
Кинематика поступательного и вращательного движений.
Динамика
Тема 1. Классическая механика
План лекции
1.1. Введение. Предмет физики
1.2. Кинематика поступательного движения
Тема 1. Классическая механика
План лекции
1.1. Введение. Предмет физики
1.2. Кинематика поступательного движения
1.1. Введение. Предмет физики
Физика – в переводе с греческого «Природа»
Современная физика
1.1. Введение. Предмет физики
Физика – в переводе с греческого «Природа»
Современная физика
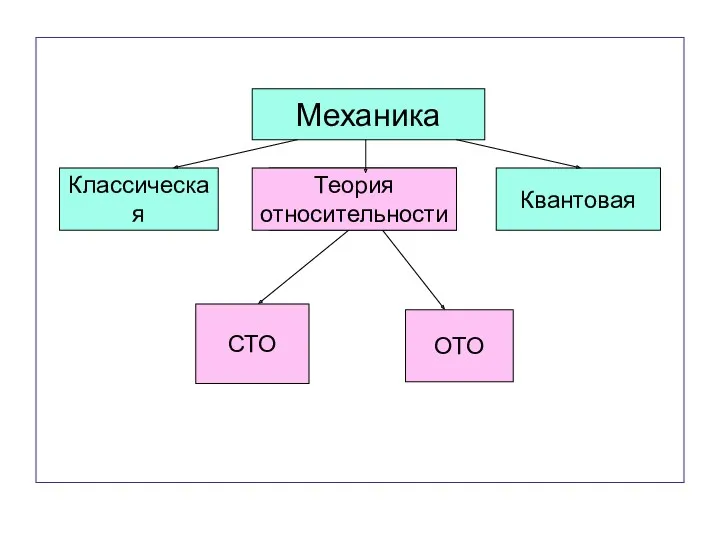
Механика
Классическая
Квантовая
Теория
относительности
СТО
ОТО
Механика
Классическая
Квантовая
Теория
относительности
СТО
ОТО
1.2. Кинематика поступательного движения материальной точки
Механическое движение – это процесс изменения
1.2. Кинематика поступательного движения материальной точки
Механическое движение – это процесс изменения
Объекты классической механики
Классическая механика изучает макроскопические тела, движущиеся с малыми скоростями,.
Макроскопические
Объекты классической механики
Классическая механика изучает макроскопические тела, движущиеся с малыми скоростями,.
Макроскопические
Разделы механики
Механика состоит из трех разделов – кинематики, динамики и статики.
Кинематика
Разделы механики
Механика состоит из трех разделов – кинематики, динамики и статики.
Кинематика
Основные понятия механики
Механическое движение – изменение положения тел друг относительно друга.
Тело
Основные понятия механики
Механическое движение – изменение положения тел друг относительно друга.
Тело
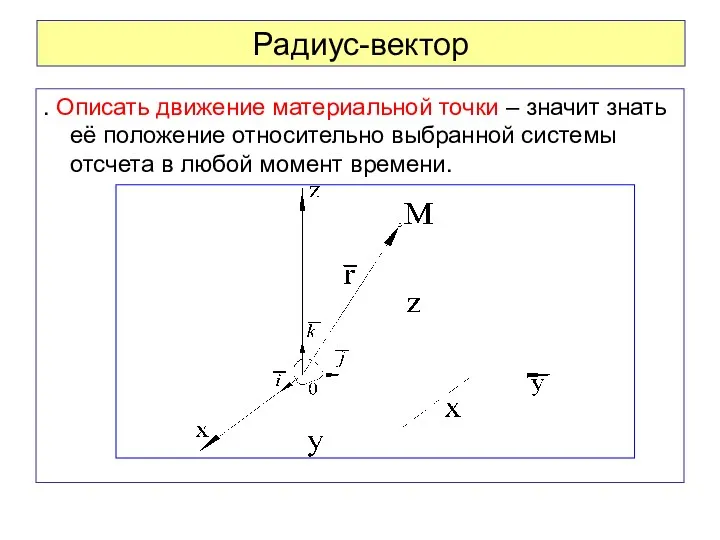
Радиус-вектор
. Описать движение материальной точки – значит знать её положение относительно
Радиус-вектор
. Описать движение материальной точки – значит знать её положение относительно
Спроецируем на оси координат:
- орты осей Х,У,Z
Спроецируем на оси координат:
- орты осей Х,У,Z
– проекции вектора на эти оси.
X, У, Z называются декартовыми
X, У, Z называются декартовыми
Закон движения
В процессе движения материальной точки её радиус-вектор изменяется по величине
Закон движения
В процессе движения материальной точки её радиус-вектор изменяется по величине
Кинематические уравнения движения
Закон движения, записанный в скалярной форме, представляет систему уравнений
Кинематические уравнения движения
Закон движения, записанный в скалярной форме, представляет систему уравнений
Вектор перемещения
Пусть материальная точка в момент времени t1 находилась в точке
Вектор перемещения
Пусть материальная точка в момент времени t1 находилась в точке
Путь и перемещение
- приращение радиуса – вектора.
Перемещением называется модуль вектора
Путь и перемещение
- приращение радиуса – вектора.
Перемещением называется модуль вектора
Элементарные путь и перемещение
Элементарное перемещение за бесконечно малый промежуток времени dt
Элементарные путь и перемещение
Элементарное перемещение за бесконечно малый промежуток времени dt
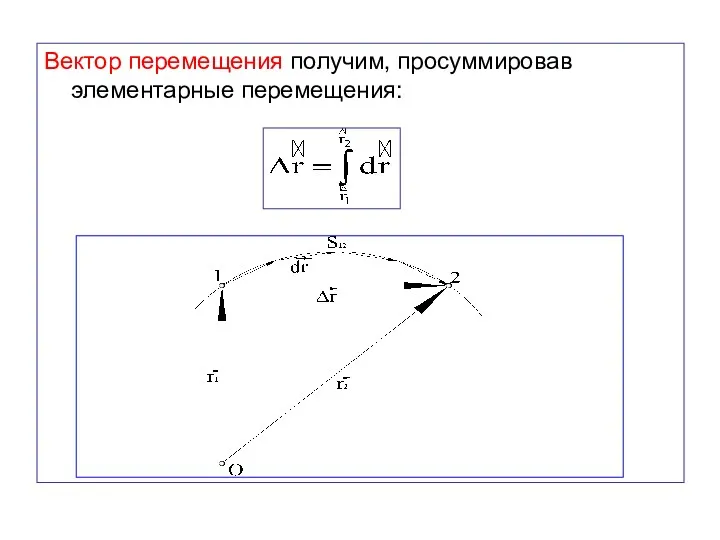
Вектор перемещения получим, просуммировав элементарные перемещения:
Вектор перемещения получим, просуммировав элементарные перемещения:
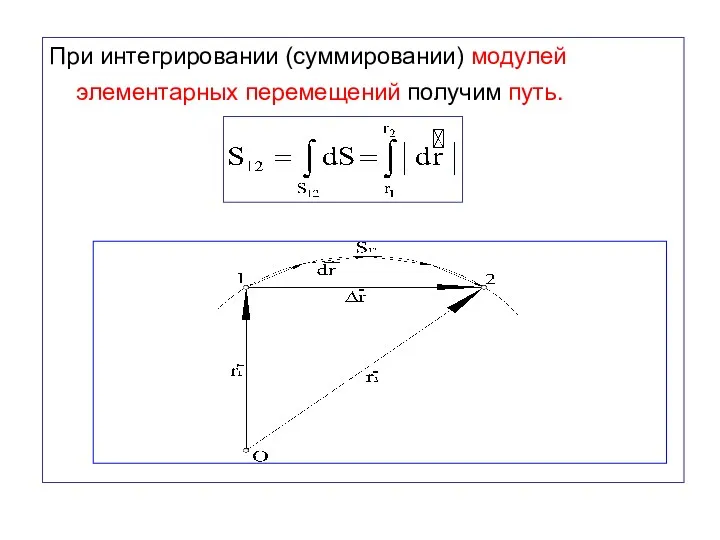
При интегрировании (суммировании) модулей элементарных перемещений получим путь.
При интегрировании (суммировании) модулей элементарных перемещений получим путь.
Скорость
Скорость характеризует быстроту изменения пространственного положения материальной точки.
Скорость равна вектору перемещению,
Скорость
Скорость характеризует быстроту изменения пространственного положения материальной точки.
Скорость равна вектору перемещению,
Средняя скорость
Вектор средней скорости за промежуток времени Δt равен
Вектор средней скорости
Средняя скорость
Вектор средней скорости за промежуток времени Δt равен
Вектор средней скорости
Среднее значение модуля скорости равно
Среднее значение модуля скорости - скалярная величина.
Среднее значение модуля скорости равно
Среднее значение модуля скорости - скалярная величина.
Мгновенная скорость
Мгновенная скорость равна пределу вектора средней скорости при неограниченном убывании
Мгновенная скорость
Мгновенная скорость равна пределу вектора средней скорости при неограниченном убывании
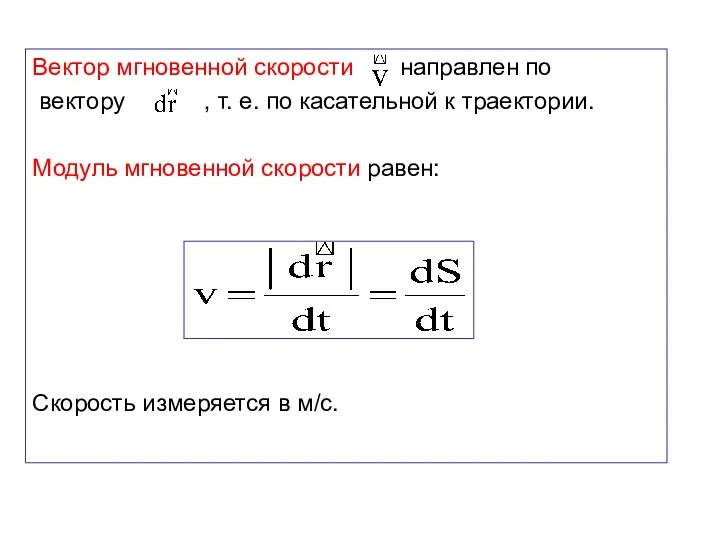
Вектор мгновенной скорости направлен по
вектору , т. е. по касательной
Вектор мгновенной скорости направлен по
вектору , т. е. по касательной
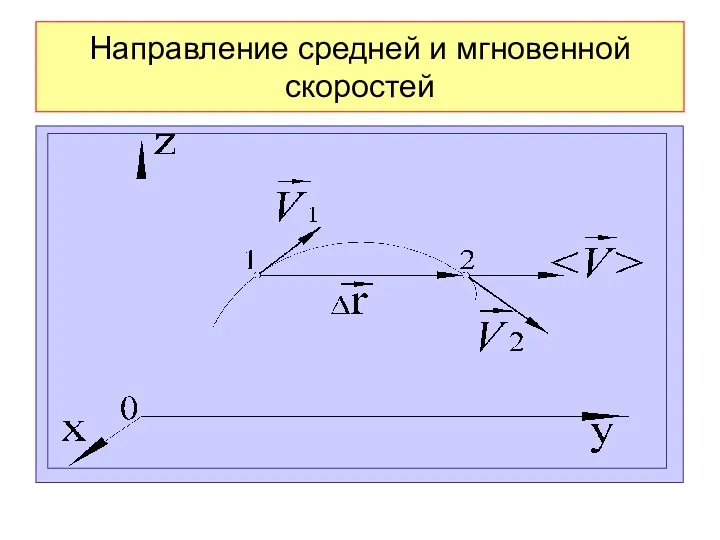
Направление средней и мгновенной скоростей
Направление средней и мгновенной скоростей
Проекции скорости на оси координат
Проекции скорости на координатные оси равны первым
Проекции скорости на оси координат
Проекции скорости на координатные оси равны первым
Ускорение
В процессе движения материальной точки модуль и направление её скорости в
Ускорение
В процессе движения материальной точки модуль и направление её скорости в
Среднее ускорение
Среднее ускорение за промежуток времени Δt равно
,
где
– приращение скорости
Среднее ускорение
Среднее ускорение за промежуток времени Δt равно
,
где
– приращение скорости
Мгновенное ускорение
Мгновенное ускорение равно пределу, к которому стремится среднее ускорение при
Мгновенное ускорение
Мгновенное ускорение равно пределу, к которому стремится среднее ускорение при
Направление вектора мгновенного ускорения совпадает с направлением вектора , который направлен
Направление вектора мгновенного ускорения совпадает с направлением вектора , который направлен
Обратная задача кинематики
В рамках кинематики решаются две основные задачи: прямая и
Обратная задача кинематики
В рамках кинематики решаются две основные задачи: прямая и
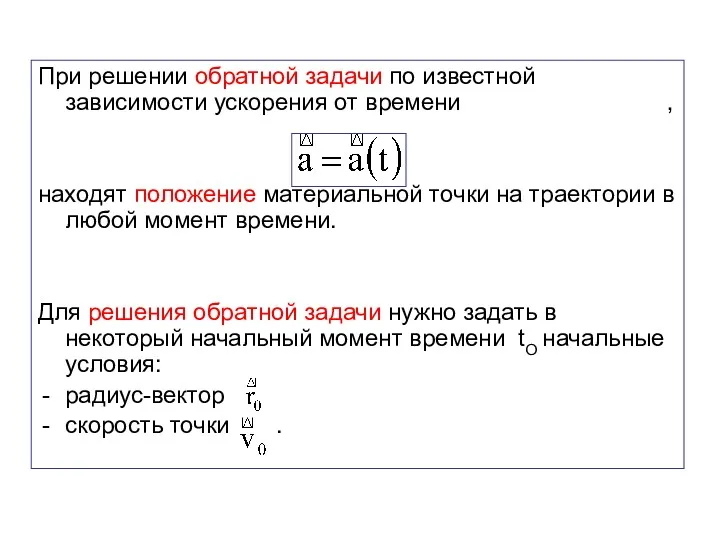
При решении обратной задачи по известной зависимости ускорения от времени ,
При решении обратной задачи по известной зависимости ускорения от времени ,
Нахождение скорости
Из определения ускорения имеем
Проинтегрируем или
Получим (1)
Нахождение скорости
Из определения ускорения имеем
Проинтегрируем или
Получим (1)
Нахождение положения точки
Из определения скорости следует, что элементарное перемещение равно
Подставим сюда
Нахождение положения точки
Из определения скорости следует, что элементарное перемещение равно
Подставим сюда
Равномерное движение
Рассмотрим частные случаи.
Равномерное прямолинейное движение
(ускорение = 0 и t0
Равномерное движение
Рассмотрим частные случаи.
Равномерное прямолинейное движение
(ускорение = 0 и t0
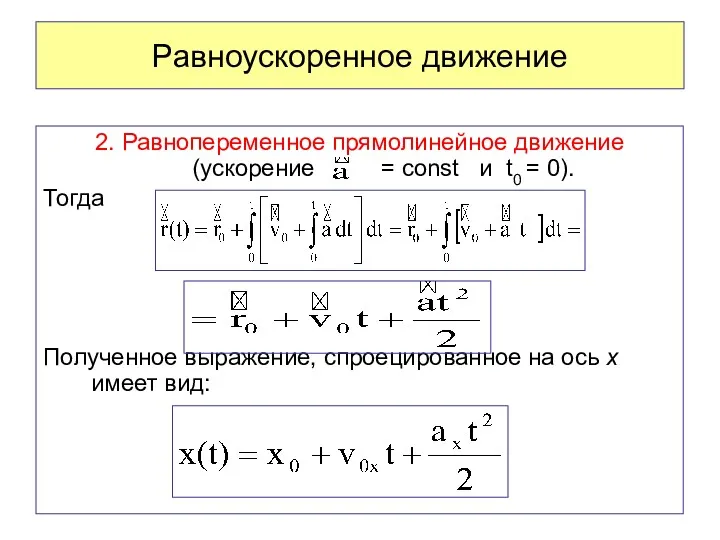
Равноускоренное движение
2. Равнопеременное прямолинейное движение (ускорение = const и t0 =
Равноускоренное движение
2. Равнопеременное прямолинейное движение (ускорение = const и t0 =
1.3. Тангенциальное и нормальное ускорения
Пусть материальная точка движется по криволинейной траектории,
1.3. Тангенциальное и нормальное ускорения
Пусть материальная точка движется по криволинейной траектории,
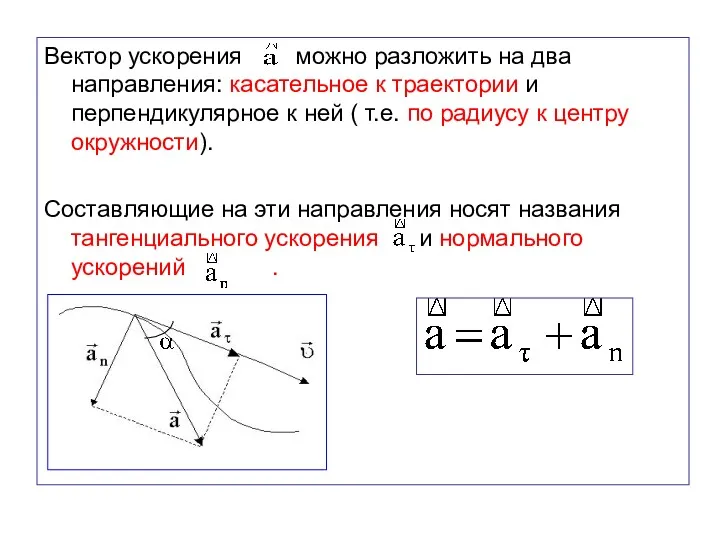
Вектор ускорения можно разложить на два направления: касательное к траектории и
Вектор ускорения можно разложить на два направления: касательное к траектории и
Тангенциальное ускорение характеризует изменение скорости по модулю.
Модуль тангенциального ускорения равен
Тангенциальное ускорение характеризует изменение скорости по модулю.
Модуль тангенциального ускорения равен
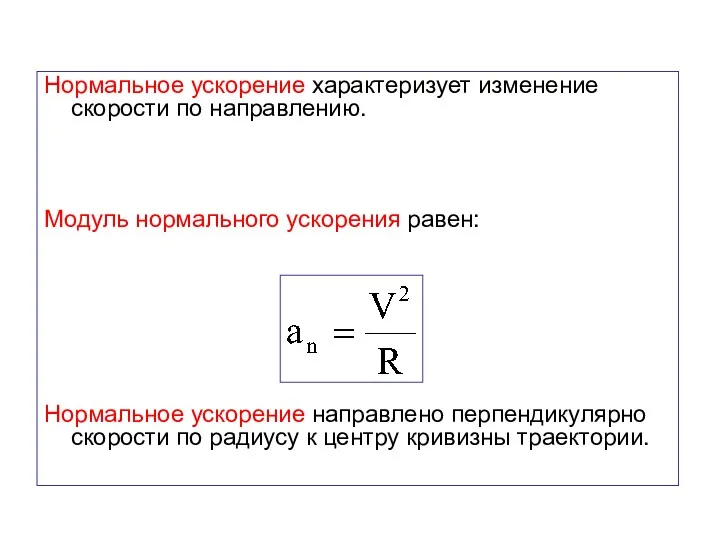
Нормальное ускорение характеризует изменение скорости по направлению.
Модуль нормального ускорения равен:
Нормальное ускорение
Нормальное ускорение характеризует изменение скорости по направлению.
Модуль нормального ускорения равен:
Нормальное ускорение
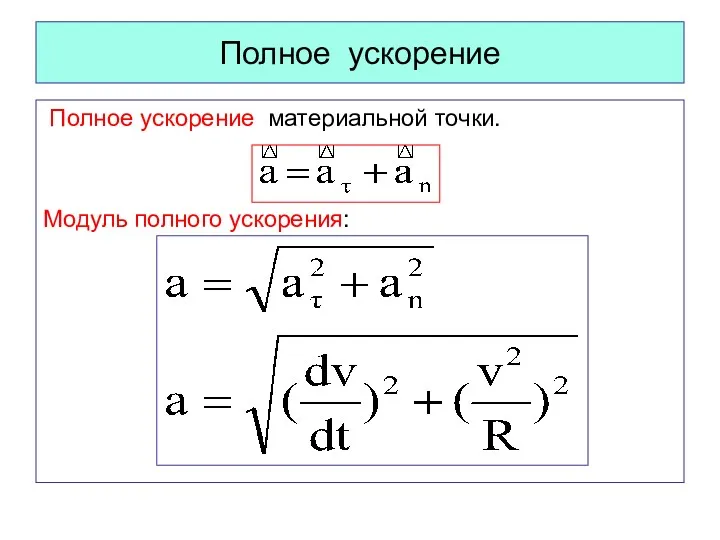
Полное ускорение
Полное ускорение материальной точки.
Модуль полного ускорения:
Полное ускорение
Полное ускорение материальной точки.
Модуль полного ускорения:
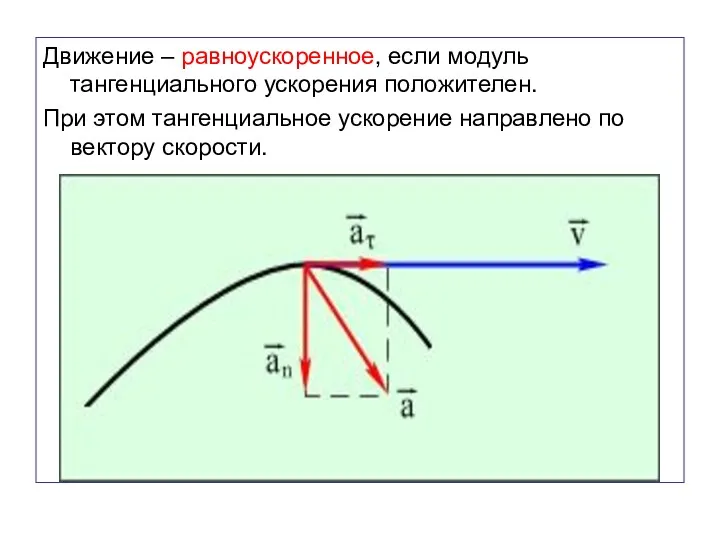
Движение – равноускоренное, если модуль тангенциального ускорения положителен.
При этом тангенциальное
Движение – равноускоренное, если модуль тангенциального ускорения положителен.
При этом тангенциальное
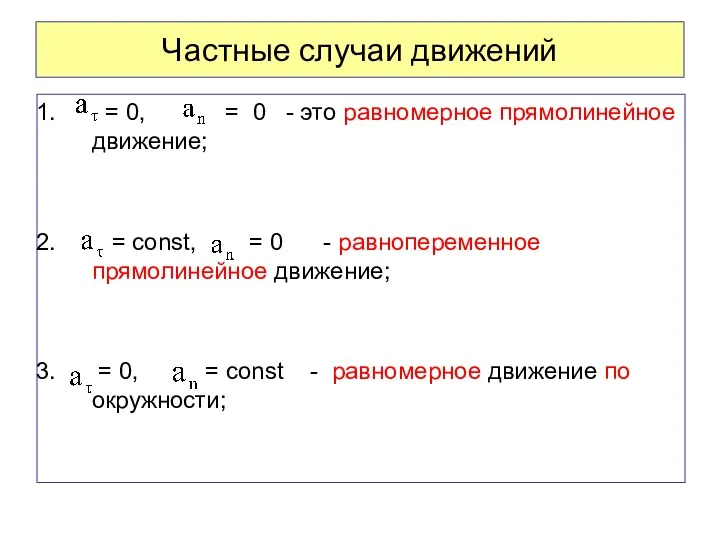
Частные случаи движений
= 0, = 0 - это равномерное прямолинейное
Частные случаи движений
= 0, = 0 - это равномерное прямолинейное
= 0, = f(t) - равномерное криволинейное движение;
5. = f(t),
= 0, = f(t) - равномерное криволинейное движение;
5. = f(t),
1.4. Кинематика вращательного движения твердого тела.
1.4.1. Поступательное и вращательное движение
Любое движение
1.4. Кинематика вращательного движения твердого тела.
1.4.1. Поступательное и вращательное движение
Любое движение
При поступательном движении все точки тела движутся одинаково, поэтому движение тела
При поступательном движении все точки тела движутся одинаково, поэтому движение тела
Вращательным движением твердого тела вокруг неподвижной оси называется такое движение, при
Вращательным движением твердого тела вокруг неподвижной оси называется такое движение, при
1.4.2. Основные понятия кинематики вращательного движения
1.4.2. Основные понятия кинематики вращательного движения
Угловое перемещение
Угловое перемещение твердого тела – вектор, численно равный углу
Угловое перемещение
Угловое перемещение твердого тела – вектор, численно равный углу
Быстроту изменения углового перемещения с течением времени характеризует угловая скорость.
Средняя угловая
Быстроту изменения углового перемещения с течением времени характеризует угловая скорость.
Средняя угловая

Мгновенная угловая скорость равна первой производной от углового перемещения по времени.
Угловая
Мгновенная угловая скорость равна первой производной от углового перемещения по времени.
Угловая

Направление векторов
Направление векторов
Быстроту изменения угловой скорости с течением времени характеризует угловое ускорение.
Среднее угловое
Быстроту изменения угловой скорости с течением времени характеризует угловое ускорение.
Среднее угловое
Мгновенное угловое ускорение равно первой производной от угловой скорости по времени
Мгновенное угловое ускорение равно первой производной от угловой скорости по времени
Направление угловых векторов.
Направление угловых векторов.
Вектор направлен вдоль оси вращения в ту же сторону, что
Вектор направлен вдоль оси вращения в ту же сторону, что
При равномерном вращении:
ε = 0, ω = const, ϕ =
При равномерном вращении:
ε = 0, ω = const, ϕ =
1.4.3. Взаимосвязь угловых и линейных величин
Кроме угловых величин: углового перемещения, угловой
1.4.3. Взаимосвязь угловых и линейных величин
Кроме угловых величин: углового перемещения, угловой
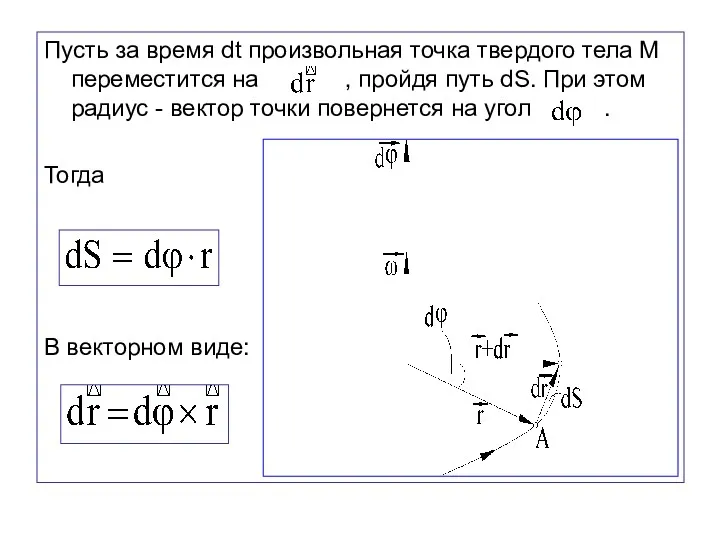
Пусть за время dt произвольная точка твердого тела М переместится на
Пусть за время dt произвольная точка твердого тела М переместится на
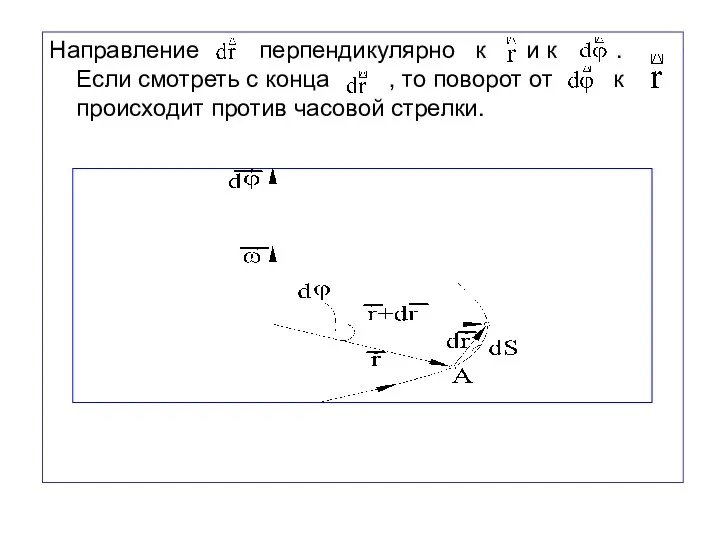
Направление перпендикулярно к и к . Если смотреть с конца ,
Направление перпендикулярно к и к . Если смотреть с конца ,
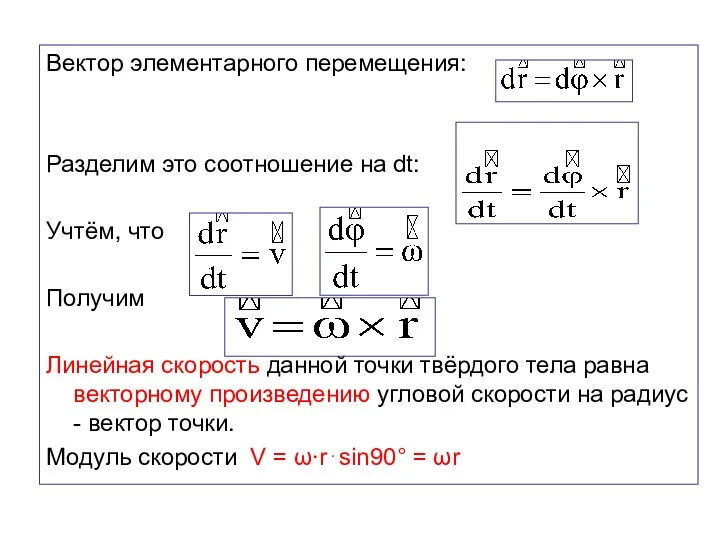
Вектор элементарного перемещения:
Разделим это соотношение на dt:
Учтём, что
Получим
Линейная скорость данной
Вектор элементарного перемещения:
Разделим это соотношение на dt:
Учтём, что
Получим
Линейная скорость данной
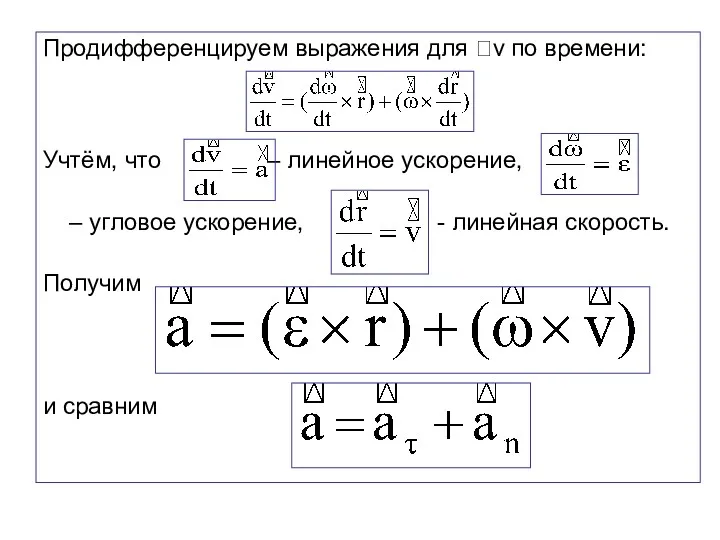
Продифференцируем выражения для v по времени:
Учтём, что – линейное ускорение,
Продифференцируем выражения для v по времени:
Учтём, что – линейное ускорение,
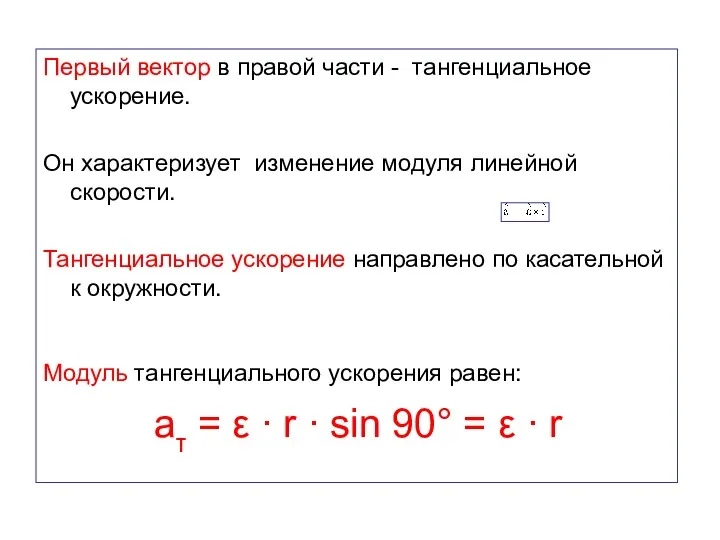
Первый вектор в правой части - тангенциальное ускорение.
Он характеризует изменение
Первый вектор в правой части - тангенциальное ускорение.
Он характеризует изменение
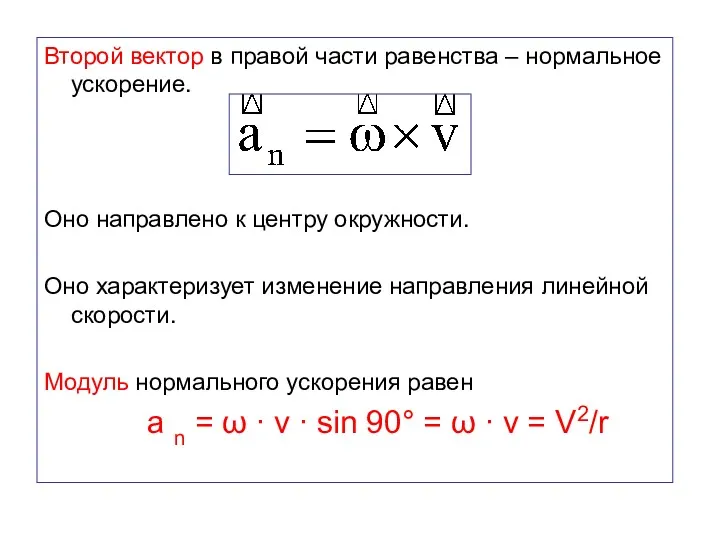
Второй вектор в правой части равенства – нормальное ускорение.
Оно направлено к
Второй вектор в правой части равенства – нормальное ускорение.
Оно направлено к

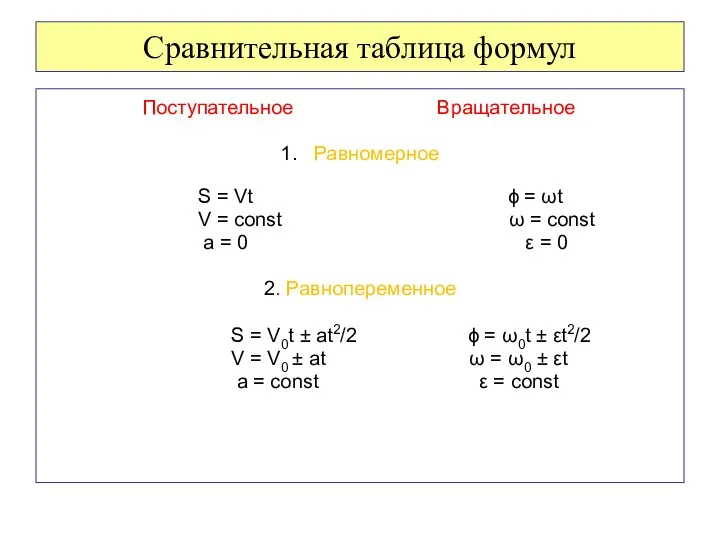
Сравнительная таблица формул
Поступательное Вращательное
1. Равномерное
S = Vt ϕ
Сравнительная таблица формул
Поступательное Вращательное
1. Равномерное
S = Vt ϕ
 Спектр веселых вопросов задач по физике
Спектр веселых вопросов задач по физике Электрический ток в различных средах
Электрический ток в различных средах Презентация по теме Явление электромагнитной индукции
Презентация по теме Явление электромагнитной индукции урок по физике (8 класс) по теме: ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ ПРОВОДНИКОВ
урок по физике (8 класс) по теме: ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ ПРОВОДНИКОВ Самостоятельные и несамостоятельные газовые разряды
Самостоятельные и несамостоятельные газовые разряды Сила упругости
Сила упругости Электрическое поле. Напряженность электрического поля
Электрическое поле. Напряженность электрического поля Презентация к уроку по физике для 8 класса по теме Лампа накаливания. Электронагревательные приборы
Презентация к уроку по физике для 8 класса по теме Лампа накаливания. Электронагревательные приборы Урок физики в 8 классе на тему работа и мощность
Урок физики в 8 классе на тему работа и мощность Основы прикладной гидравлики
Основы прикладной гидравлики Основы кинематики. 9 класс
Основы кинематики. 9 класс Простые механизмы
Простые механизмы Аеродинаміка та динаміка польоту літака. Характеристики профілю крила. Центр тиску та фокус профілю. (Лекція 4.2.3)
Аеродинаміка та динаміка польоту літака. Характеристики профілю крила. Центр тиску та фокус профілю. (Лекція 4.2.3) Геометрия масс тела
Геометрия масс тела Електричний струм у газах. Самостійний і несамостійний газові розряди. Плазма
Електричний струм у газах. Самостійний і несамостійний газові розряди. Плазма Коммутация в машинах постоянного тока
Коммутация в машинах постоянного тока Теория пар сил
Теория пар сил ФИЗИКА 8 класс Изменение агрегатных состояний вещества
ФИЗИКА 8 класс Изменение агрегатных состояний вещества Газораспределительный механизм двигателя
Газораспределительный механизм двигателя Гидростатика и гидродинамика
Гидростатика и гидродинамика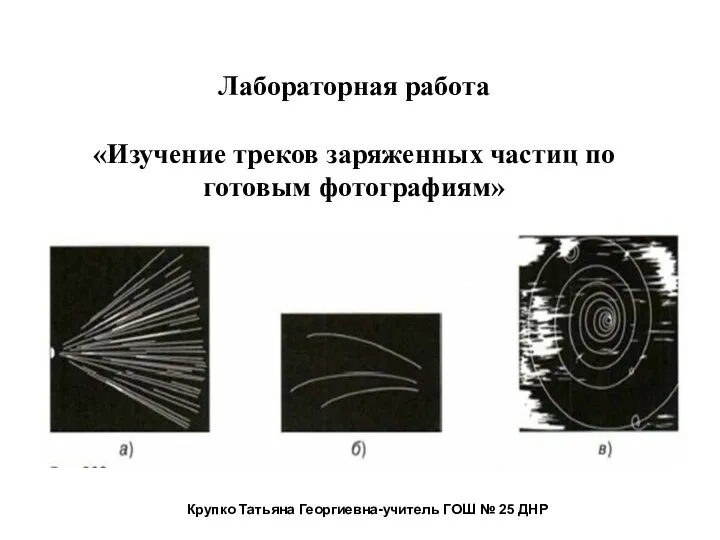 Изучение треков заряженных частиц по готовым фотографиям. Лабораторная работа
Изучение треков заряженных частиц по готовым фотографиям. Лабораторная работа Электризация. Закон кулона. Урок физики в 10 классе
Электризация. Закон кулона. Урок физики в 10 классе Соединения деталей. Виды изделий. Резьбовые соединения
Соединения деталей. Виды изделий. Резьбовые соединения Школа экспериментов. Занятие 3
Школа экспериментов. Занятие 3 Устойчивость сжатых стержней. Лекция №6
Устойчивость сжатых стержней. Лекция №6 Гармонические колебания (урок решения задач) 11 кл
Гармонические колебания (урок решения задач) 11 кл Теорема Остроградского-Гаусса
Теорема Остроградского-Гаусса Основы проектирования. Детали машин и основы конструирования. Основные понятия деталей машин
Основы проектирования. Детали машин и основы конструирования. Основные понятия деталей машин