- Кулачковые механизмы

Содержание
- 2. 7.2 Виды кулачковых механизмов Рис. 7.1 – Плоский и пространственный кулачковые механизмы а) – плоский. б)
- 3. Рис. 7.2 – Кулачковые механизмы с различными видами движения толкателя а) – с поступательным движением толкателя,
- 4. Рис. 7.3 – Кулачковые механизмы с разными видами замыкания толкателя и кулачка а) – с силовым
- 5. Рис. 7.4 – Кулачковые механизмы с разными по виду толкателями а) – с плоским толкателем, б)
- 6. 7.3 Фазовые углы кулачкового механизма При вращении кулачка толкатель совершает следующие фазы движения: 1 – подъём,
- 7. Рис. 7.6 – График перемещения толкателя в зависимости от угла поворота кулачка φП φВВ φО φНВ
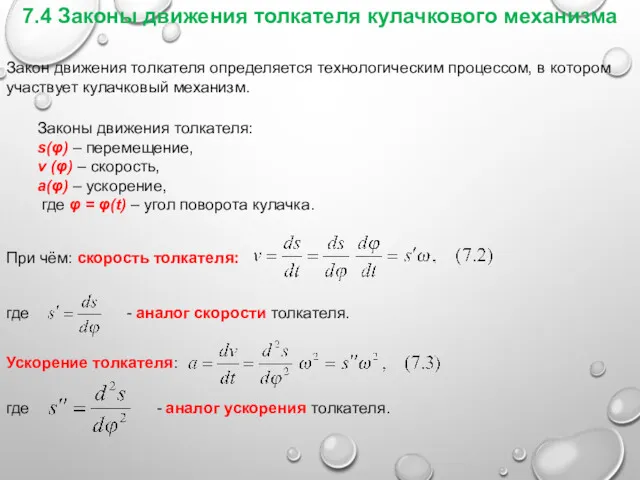
- 8. 7.4 Законы движения толкателя кулачкового механизма Закон движения толкателя определяется технологическим процессом, в котором участвует кулачковый
- 9. Различают три группы законов движения толкателя: 1 – движение толкателя с жёстким ударом, 2 - движение
- 10. Диаграмма аналога ускорений s′′ (ϕ ) толкателя строится после определения максимальных значений а1 и а2 аналогов
- 11. Пример построения диаграмм движения толкателя кулачкового механизма φП φВВ φО φНВ 360о 360о 360о а1 а2
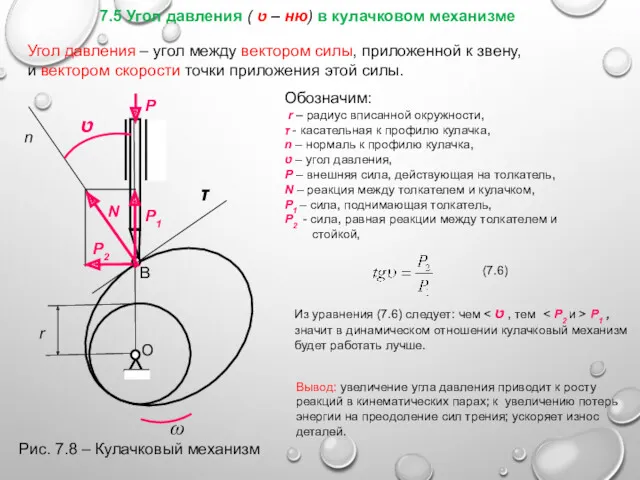
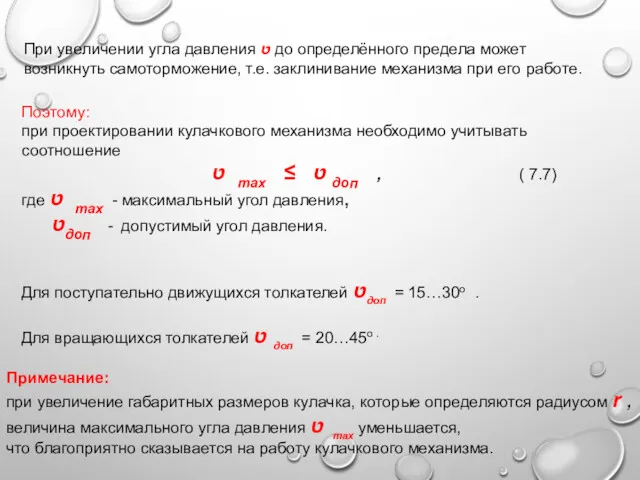
- 12. 7.5 Угол давления ( ט – ню) в кулачковом механизме Угол давления – угол между вектором
- 13. При увеличении угла давления ט до определённого предела может возникнуть самоторможение, т.е. заклинивание механизма при его
- 15. Скачать презентацию
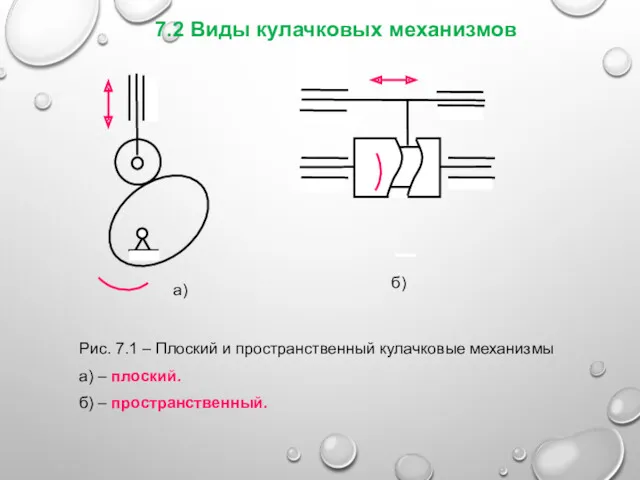
7.2 Виды кулачковых механизмов
Рис. 7.1 – Плоский и пространственный кулачковые механизмы
а)
7.2 Виды кулачковых механизмов
Рис. 7.1 – Плоский и пространственный кулачковые механизмы
а)
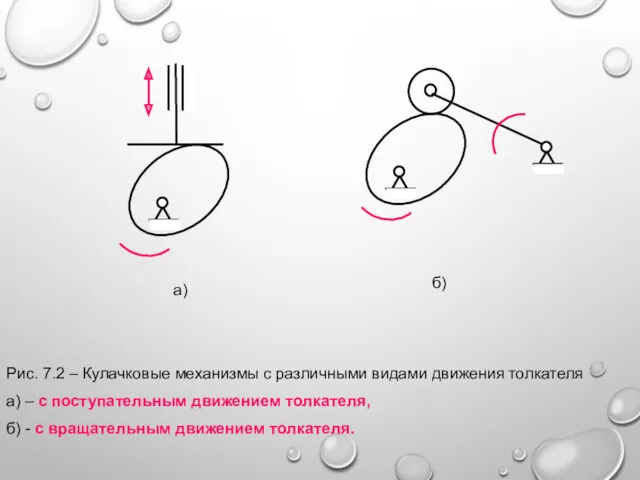
Рис. 7.2 – Кулачковые механизмы с различными видами движения толкателя
а) –
Рис. 7.2 – Кулачковые механизмы с различными видами движения толкателя
а) –

Рис. 7.3 – Кулачковые механизмы с разными видами замыкания толкателя
Рис. 7.3 – Кулачковые механизмы с разными видами замыкания толкателя
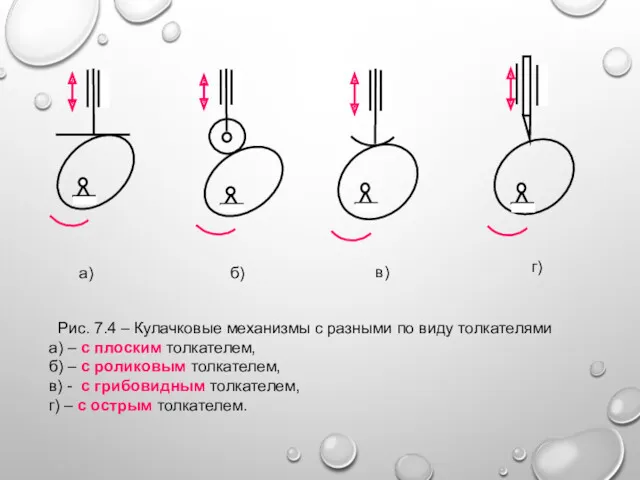
Рис. 7.4 – Кулачковые механизмы с разными по виду толкателями
а)
Рис. 7.4 – Кулачковые механизмы с разными по виду толкателями
а)

7.3 Фазовые углы кулачкового механизма
При вращении кулачка толкатель совершает следующие фазы
7.3 Фазовые углы кулачкового механизма
При вращении кулачка толкатель совершает следующие фазы
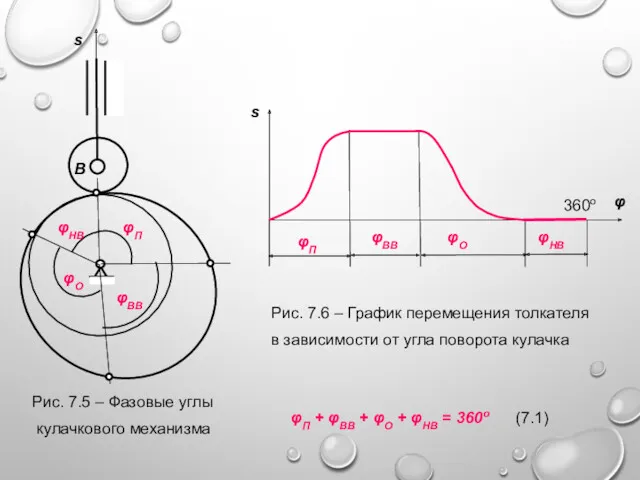
Рис. 7.6 – График перемещения толкателя
в зависимости от угла поворота кулачка
φП
φВВ
φО
φНВ
Рис.
Рис. 7.6 – График перемещения толкателя
в зависимости от угла поворота кулачка
φП
φВВ
φО
φНВ
Рис.
7.4 Законы движения толкателя кулачкового механизма
Закон движения толкателя определяется технологическим
7.4 Законы движения толкателя кулачкового механизма
Закон движения толкателя определяется технологическим
Различают три группы законов движения толкателя:
1 – движение толкателя с жёстким
Различают три группы законов движения толкателя:
1 – движение толкателя с жёстким
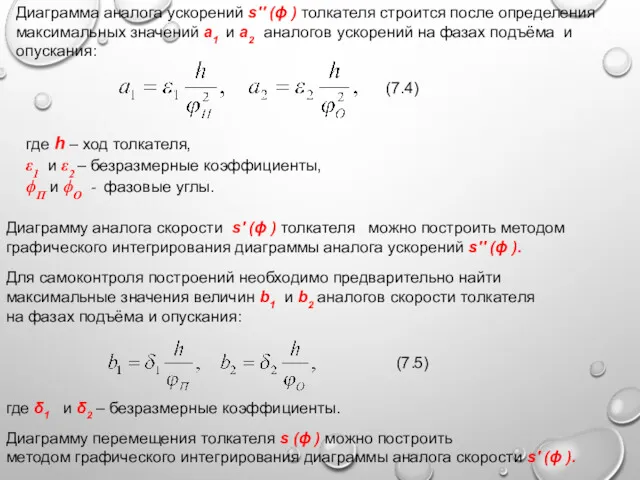
Диаграмма аналога ускорений s′′ (ϕ ) толкателя строится после определения
максимальных значений
Диаграмма аналога ускорений s′′ (ϕ ) толкателя строится после определения
максимальных значений

Пример построения диаграмм движения толкателя кулачкового механизма
φП
φВВ
φО
φНВ
360о
360о
360о
а1
а2
b1
b2
h
Рис. 7.7 – Диаграммы движения
Пример построения диаграмм движения толкателя кулачкового механизма
φП
φВВ
φО
φНВ
360о
360о
360о
а1
а2
b1
b2
h
Рис. 7.7 – Диаграммы движения
7.5 Угол давления ( ט – ню) в кулачковом механизме
Угол
7.5 Угол давления ( ט – ню) в кулачковом механизме
Угол
При увеличении угла давления ט до определённого предела может возникнуть самоторможение,
При увеличении угла давления ט до определённого предела может возникнуть самоторможение,
 Ішкi энергия. Ішкi энергияны өзгерту тәсiлдерi
Ішкi энергия. Ішкi энергияны өзгерту тәсiлдерi Физические свойства нефти и газа. Физические свойства нефти. Фазовые диаграммы. Газосодержание. Объемный коэффициент нефти
Физические свойства нефти и газа. Физические свойства нефти. Фазовые диаграммы. Газосодержание. Объемный коэффициент нефти Первый искусственный спутник Земли
Первый искусственный спутник Земли Презентация Физика в нашем доме
Презентация Физика в нашем доме Pulse time-domain holography for terahertz wavefront metrology
Pulse time-domain holography for terahertz wavefront metrology Передача давления жидкостями и газами. Закон Паскаля
Передача давления жидкостями и газами. Закон Паскаля сопромат
сопромат Основные понятия и определения. Классификация электрических цепей
Основные понятия и определения. Классификация электрических цепей Основные понятия в теории механизмов и машин. ТММ Лекция 1
Основные понятия в теории механизмов и машин. ТММ Лекция 1 Презентация к уроку развивающего обучения Простые механизмы часть 2
Презентация к уроку развивающего обучения Простые механизмы часть 2 Закон Гука
Закон Гука Урок в 8 классе по физике Закон Ома
Урок в 8 классе по физике Закон Ома Электроразведка. Электрическое и магнитное поля
Электроразведка. Электрическое и магнитное поля История патефона
История патефона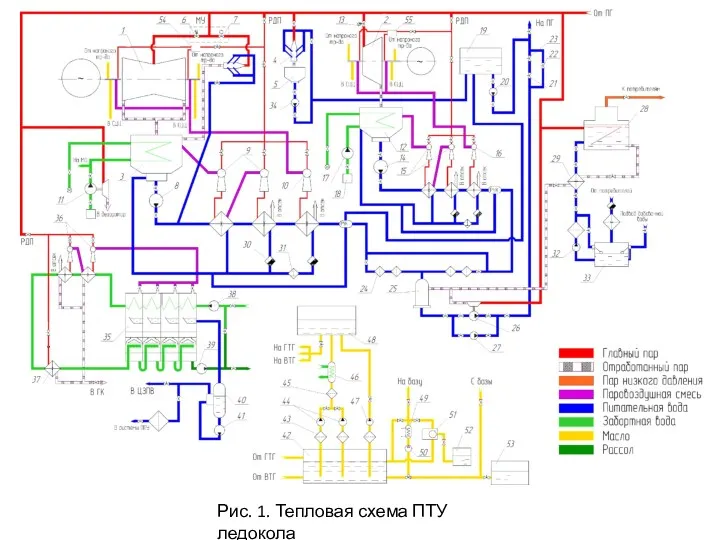 Системы ПТУ 2
Системы ПТУ 2 Particle physics
Particle physics Автомобильная система выпуска отработавших газов, выхлопная система
Автомобильная система выпуска отработавших газов, выхлопная система Елементарні частинки
Елементарні частинки Самолеты, используемые в работах по активным воздействиям на атмосферные процессы. Тема 6
Самолеты, используемые в работах по активным воздействиям на атмосферные процессы. Тема 6 Закон всемирного тяготения
Закон всемирного тяготения Механічна робота
Механічна робота Механические и электромагнитные колебания
Механические и электромагнитные колебания Техника транспорта, обслуживание и ремонт. Ремонт кривошипно-шатунного механизма. (Тема 9.1)
Техника транспорта, обслуживание и ремонт. Ремонт кривошипно-шатунного механизма. (Тема 9.1) Исследование устойчивости контура неавтоматического управления. Электродистанционные системы управления самолетом
Исследование устойчивости контура неавтоматического управления. Электродистанционные системы управления самолетом Формирование северного сияния
Формирование северного сияния Механічний рух
Механічний рух Акустический метод неразрушающего контроля
Акустический метод неразрушающего контроля Выбор оборудования для участка ремонта и заряда АКБ легкового автотранспорта
Выбор оборудования для участка ремонта и заряда АКБ легкового автотранспорта